
Abstract
If electrical energy demand is not balanced with electricity generation the results are additional electrical power grid investments and system stability risks. An increasing energy demand caused by charging plug-in electric vehicles (PEVs) is expected to affect distribution grid levels in the future. Uncontrolled PEV charging causes additional grid stress but PEVs are also capable of balancing the demand to the present supply situation via charging control strategies. Different control strategies for PEVs have been tested to address this issue. They can be classified as indirect, direct and autonomous control strategies. However, it is still under discussion, which charging strategy is best suited to integrate PEVs into feature dependent power generation on a distribution grid level. We investigated the advantages and weaknesses of autonomous control via local voltage measurement compared to direct and indirect charging control. Here we found that autonomous control of PEVs can counteract voltage dips caused by simultaneous charging. This is of great benefit for smart grids because autonomous control realised with PEVs internal systems can reduce the investment in communication technology on the infrastructure side. Nevertheless, this research also shows the limits of autonomous control. It can be concluded that a mix of different control strategies is necessary to realise PEVs demand response opportunities. Autonomous control will play an important role supporting the control of PEVs to stabilise smart grids.
Access provided by CONRICYT-eBooks. Download conference paper PDF
Similar content being viewed by others

Keywords
- Smart grid
- Plug-in electric vehicles (PEVs)
- Control strategies
- Direct control
- Indirect control
- Autonomous control
1 Introduction
With high penetration rates of plug-in electric vehicles (PEVs) an increasing electricity demand especially at low voltage distribution grid level occurs. This could overcharge the grid if these additional consumers are not sufficiently controlled [1,2,3,4].
Therefore a high number of different control strategies were recently introduced to manage PEVs charging behaviour. The goal of these strategies is to integrate PEVs into electrical distribution grids by utilising low electricity prices and/or by providing ancillary services for stable grid operation. Furthermore, control strategies are used to minimise power losses, avoid thermal overstress of grid assets and voltage violations [5,6,7,8].
Control strategies differ primarily in terms of user acceptance, complexity of information and communications technology (ICT) and final decision-making authority over the charging process [9].
In [10, 11] control strategies are categorised into direct and indirect methods. Within direct control, a central aggregation unit is allowed to control the charging of the PEVs. For indirect control the end user decides on the basis of (price)-incentives and is therefore finally in control of the PEV charging process [12]. Reference [9] adds an autonomous category where the PEV itself manages its charging process based on grid signals.
Direct control strategies require bidirectional ICT to provide PEV driver information to the aggregator and to allow the aggregator remote charging control over the PEV [1, 4, 13]. The goal of direct control can be efficient market integration as well as frequency and local voltage control [10, 14, 15].
Within indirect control strategies PEV users receive price incentives to schedule charging. These incentives are transported statically via time of use (TOU) or dynamic via critical peak pricing (CPP) and real-time pricing (RTP) [11, 16, 17]. These pricing methods are also referred to as price-based demand response [12]. For indirect control PEV users receive information but do not provide information to a central unit in contrast to direct control, hence only unidirectional ICT is required. Within the indirect control strategy PEV users decide whether they react to the price incentives, and therefore have final control over the charging process [9, 12].
Autonomous control strategies take only the information of available sensorsFootnote 1 into consideration to schedule real and reactive power demand [6, 7]. Therefore, PEVs controlled by this strategy need a device to measure node voltage and power electronics, which are capable of responding; ICT is not required. If PEVs are additionally equipped with ICT, this approach has to be considered as direct or indirect control strategy with grid monitoring.
Which type of control strategy should be used in a future smart grid is still under discussion. The literature lacks comparisons between direct, indirect and autonomous control. Here we compare these strategies by focusing on the capability to avoid grid overstress in terms of voltage violations. Therefore, we build a computer model, which simulates these control strategies and evaluates their grid impact.
In Sect. 2 we describe a grid topology with connected consumers where we test the control strategies introduced in Sect. 3. In particular we describe a direct strategy with perfect charging control via a central aggregator, an indirect strategy using a static TOU tariff to schedule PEV charging and an autonomous control strategy which feeds in reactive power as a function of the node voltage. In Sect. 4 we show the impact of these strategies on grid voltages within our model. Additionally, we present a reference case, where the grid operates without connected PEVs. Conclusions are given in Sect. 5.
2 Network Model and Load Profiles
Within our alternating current (AC) simulation model we compare a direct, an indirect and an autonomous control strategy (see Sect. 3) on a single 10 node low voltage (LV)Footnote 2 test feeder by only varying PEVs control strategies. The test feeder is taken from [18]. With respect to DIN EN 50160 grid voltage should not be above or below 0.1 p.u more often than in 5% of all 10 min time intervals for one week at medium voltage (MV) and LV distribution grid level [19]. Here we contribute 30% (±0.03 p.u) to LV level.
For each control strategy every node is connected via a 30 m long cable of type NAYY-J 35 \(\mathrm{mm}^2\) to the next node. We assume symmetric load and a connected single dwelling unit (SDU) with a yearly electrical energy demand of 5000 kWh, without space heating, on very node. This refers to the average yearly electricity demand for a four person family home in Germany [21]. The simulation runs from Monday to Sunday for the transition season on a fine weather day. Therefore we use typical household profiles from reference [21] and aggregate them to a 15 min base. SDUs on node 4, 5, 6 and 9 cover their space heat demand by NSHs of type AEG 3 kW WSP 3010 [22] with a constant power demand of 6 kW from 10 pm to 4 am in the morning. This refers to an average space heating demand of approximately 190 \(\mathrm{m}^2\) net dwelling area for a newly built house [23]. For the indirect control strategy introduced in Sect. 3.2 we assume a TOU tariff with a low price period between 11 pm and 6 am for each day and high electricity prices for the rest of the time (see Fig. 1).

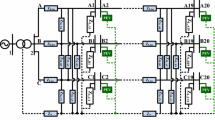
Furthermore, we assume a very high PEV penetration rate (50%) by connecting a separate PEV to node 2, 3, 6, 8 and 10 (see Fig. 2).

Low voltage 10 node test feeder, with connected single dwelling units (SDUs), plug-in electric vehicles (PEVs) and night storage heaters (NSHs) (scenario base on [18])
For each day and simulation run every PEV arrives at 7 pm with an empty battery on the same node and departs at 7 am the next morning fully charged. Furthermore, every PEV requires 25 kWh electrical energy a day, charges with 95% efficiency and provides a high maximal charging power of 18 kVA. The scenario is based on reference [18].
3 Control Strategies
As reference [9] shows, control strategies for PEVs can be classified into direct, indirect and autonomous control. Here we describe how we implement these strategy types in an alternating current (AC) distribution grid simulation by schedule PEVs electrical power demand.
3.1 Direct Control with a Central Aggregator
For our direct charging control strategy the charging behaviour for all connected PEVs is controlled by a central aggregator with perfect foresight.
Here the aggregator defines a maximal allowed power demand (\(P_{max,n,t}\)) for every node n and and every time step t to avoid grid overstress. The aggregator finds \(P_{max,n,t}\) by rising monotonously the combined nodal power \(P_{n,t}\) just before the voltage on node 10 violates the 0.97 p.u boundary. Furthermore, we assume that the aggregator knows the preferences of all PEVs users and can therefore prioritise PEVs charging by putting them into an ordered charging queue. In this study the aggregator orders PEVs priority by their connected node number in ascending order, hence the PEV on node 2 has the highest priority. After PEVs are prioritised, the aggregator evaluates for every t if there are one or more PEVs with less than 100% state of charge (SOC) connected to the grid. If this is true, he picks the highest prioritised PEV with SOC below 100%.
Within our perfect control assumption the aggregator knows the maximal charging power, as well as the time of arrival and departure for every PEV. Furthermore, he is aware of SDUs and NSHs power demand (\(P_{SDU,n,t}\), \(P_{NSH,n,t}\)) on every n and for every t. Therefore the real power demand (\(P_{PEV,n,t}\)) for the picked PEV is limited with respect to Eq. 1.
The PEV with the highest priority starts charging with respect to the maximal allowed charging power until it reaches 100% SOC. Afterwards the remaining PEVs are charged with respect to their priority by the same procedure (see Fig. 3).

Direct control strategy, coordinates plug-in electric vehicle (PEV) charging via a central aggregator
3.2 Indirect Control via a Static Time of Use (TOU) Tariff
For the indirect control strategy PEV users schedule charging individually to minimise their costs for electricity consumption based on an electricity price tariff and without the consideration of other PEVs charging behaviour and grid constraints. Like reference [24], which provides a TOU tariff give an incentive to charge at low price times, we use one static TOU tariff which is assigned to every PEV (see Fig. 1).
At the moment a PEV is connected to the grid the energy which should be charged into the battery, until the PEV departs, is evaluated. Depending on the PEV’s charging power and energy demand, the number of time steps, which are necessary to charge the PEV battery, are calculated. For the grid connection time (GCT) in between (see Eq. 2) the price tariff is ordered to evaluate these time steps with the lowest possible electricity costs.
If there are multiple possibilities for the same low price, PEV users prefer the earlier charging possibility (see also Fig. 4).

Indirect control strategy via a time of use (TOU) tariff
In our scenario all PEVs receive the same tariff and arrive before the low price time begins at 10 pm. Therefore charging begins simultaneously at 10 pm with maximal charging power until every PEV’s battery reaches 100% SOC (see also Sect. 2).
3.3 Autonomous Control Implementing Reactive Power to Voltage Control
Local supplyFootnote 3 and local demandFootnote 4 influence grid voltage which can be used as a control signal for PEVs. Furthermore, reactive power can be used to influence grid voltage positively. Within our autonomous control strategy this mechanism is used.
Here every PEV schedules the charging power based on the node voltage on the PEV grid connection point. We use a reactive power to grid voltage relationship by raising reactive power linearly between nominal grid voltage and a 0.03 p.u boundary (see Fig. 5). Reference [6] shows that the linear approach fits into the power dependencies, where reactive power demand leads to increasing and reactive power supply to decreasing node voltages. The reference uses a partly linear relationship where reactive power supply is not used to stabilise grid voltages around 1 p.u. We adapt this with a fully linear voltage to reactive power relationship between 0.97 and 1.03 p.u. This approach leads to higher inverter losses, but allows a wider range to stabilises grid voltages. Nevertheless, the evaluated amount of reactive power limits real power demand with respect to Eq. 3. Both effects, reactive power supply as well as reduced real power demand have a positive effect on grid voltages [25].
For our approach every PEV measures for every time step the node voltage if it is connected on a grid connection point. Afterwards it uses the measured node voltage and the reactive power to voltage relation to evaluate its reactive power for that time step (see Fig. 5).

Reactive power (Q) on all three phases as a function of node voltage absolute value (V) for autonomous control. Capacitive power demand if node voltage is below 1 per unit (p.u.), inductive if node voltage is above 1 p.u.
If the PEV battery is already fully charged, only reactive power \(Q_t\) is used to stabilise grid voltages. If not, \(Q_t\) and the maximal PEV inverter power \(\vert \underline{S}_{max}\vert \) is used to evaluate the PEV’s real power demand \(P_t\) (see Eq. 3).
With respect to the maximal battery storage the PEV battery gets charged by the evaluated real power (see Fig. 6).

Autonomous control strategy, implementing reactive power to voltage control

Node voltages without connected plug-in electric vehicles (PEVs) to the 10 node test feeder and with connected PEVs implementing direct-, indirect- and autonomous control
4 Results and Discussion
In Fig. 7 we show the individual node voltages of our 10 node feeder (see Fig. 2) for the direct, indirect and autonomous control strategy (see Sect. 3). The voltages are recorded over simulation time and presented within quartiles. Additionally we present a case without connected PEVs, where only SDU and NSHs consume electrical power.
Due to the fact, that we do not consider local electrical power generation, power demand is higher than electrical generation for all time steps and nodes. Hence, for each case the highest voltage dips occur on the last node of the power grid, i.e. node 10.
As described in Sect. 2, all connected SDU exhibit the same power profile, therefore high voltage dips occur at peak demand (19 pm on weekdays) even without connected PEVs (see Sect. 4.1). We use these improbable circumstances to emphasise that electrical grids are designed for peak electrical power demand. Furthermore, in all cases we assume symmetric load on all three grid phases; unsymmetric load would lead to even higher voltage dips.
Here we simulate these control strategies for just one week during the transition season on a rather small 10 node feeder. For other grids, seasons and PEV penetration rates the occurring voltage dips would probably be less extreme, but the results should show the same tendency.
4.1 Without Connected Plug-In Electric Vehicles (PEVs)
If there are no PEVs connected to the grid, the highest voltages dips occur on node 10. On this node for 75 percent of all time steps voltages do not dip below 0.987 p.u. Even for peak demand node voltages do not fall below 0.97 p.u, hence no voltage bound violations occur (see Fig. 7, Without PEVs).
4.2 Direct Control with Perfect Foresight
For the direct control scenario PEVs’ charging process follows the algorithm described in Sect. 3.1. For 75% of all time steps voltages do not dip below 0.98 p.u from node 1–7. Voltages on node 8, 9 and 10 are slightly deeper compared to node 7.
Here voltages remain above 0.97 p.u on all nodes (see Fig. 7, Direct control). This is because we assume that an aggregator, which manages all PEVs’ charging process, has perfect foresight. Therefore he knows the maximal allowed feed-in power, the actual power demand of every consumer, PEV driver’s preferences, daily arrival and departure times and can therefore perfectly coordinate PEVs’ charging behaviour.
4.3 Indirect Control via a Single Time of Use (TOU) Tariff
Here PEVs’ charging follows the indirect strategy introduced in Sect. 3.2, where every PEV uses the same TOU tariff. Therefore every PEV receives the same price and consequently all PEVs start charging simultaneously. At that high demand time high voltage dips occur especially on node 10 (below 0.94 p.u). For 75% of the simulation time voltages do not dip below 0.994 p.u on every node. Consequently, voltages vary more often compared to direct control (see Fig. 7, Indirect control).
As differentiated at [26] and shown at [4] purely market orientated approaches lead to high grid overstress. We demonstrate this once more with our indirect control strategy. Nevertheless, much better results could be achieved if PEVs receive different price signals and therefore do not react simultaneously.
4.4 Autonomous Control via Reactive Power to Voltage Control
Within our autonomous control strategy grid voltages can be held above 0.965 p.u for all nodes over the entire simulation time. On node 8, 9 and 10 voltages violations occur at high demand times, but they stay above the 0.97 p.u boundary for the rest of the week, while voltages on node 1–7 remain in the allowed interval. Like for our direct control strategy voltages do not dip below 0.98 p.u at node 1–7 for 75% of all time steps. Hence, autonomous control can significantly reduce 0.97 p.u voltage bound violations compared to our indirect approach, but does not eliminate them completely (compare Fig. 7, Autonomous control with Indirect control).
Within our approach PEVs react simultaneously for each 15 min simulation step, which is an improbable case. Controlling the PEVs one after another by updating grid voltages every time, would be a more realistic approach. Additionally, PEVs measure grid voltages only once for every time step. This could be improved by a control loop. The control loop could monitor grid voltage on a PEV grid connecting point while the PEV increases its power demand continuously until the allowed voltage boundary is reached for that simulation step.
5 Conclusion
We set up a computer model for a simple power grid structure to compare different control strategies for plug-in electric vehicle (PEV) charging. In particular we investigated a direct, an indirect and an autonomous control strategy with respect to the resulting grid voltages.
Within our model direct control works best in terms of voltage stability, because no 3% boundary violations occur (see Sect. 4.2). This is because we assume that for direct control our aggregator has perfect foresight and therefore can realise optimal control. However, such an approach is probably related to extensive information and communications technology (ICT) and therefore high financial investments. The indirect control strategy, which uses a static time of use (TOU) tariff, can be realized by a timer function with most PEVs on the market today. Costs for the technical implementation are low but the strategy can result in opposite effects. Instead of relieving the stress on the grid TOU tariffs can cause strong voltage dips. Our autonomous control strategy can achieve good results in terms of voltage control while using PEVs internal ICT and sensors. This study shows that TOU tariffs are not sufficient to reach good grid integration of PEVs in the future. The autonomous control strategy used leads to much better results and should therefore be part of future strategies integrating PEVs into the grid.
Also user acceptance, required investments into ICT and grid extension have to be taken into account in order to evaluate which control strategy is best suited for future smart grids. These aspects are not addressed here, but should be considered in future research.
Notes
- 1.
E.g. frequency or voltage measurement at the grid connection point.
- 2.
400 V phase to phase refers to 1-Volt-p.u.
- 3.
E.g. renewable energy technologies like wind turbines and photovoltaic.
- 4.
E.g. PEVs and NSHs.
References
Sara Deilami et.al., Real-Time Coordination of Plug-In Electric Vehicle Charging in Smart Grids to Minimize Power Losses and Improve Voltage Profile, IEEE Transactions on Smart Grid, 456–467, (2011)
Amir S et.al., Impacts of battery charging rates of Plug-in Electric Vehicle on smart grid distribution systems, 2010 IEEE PES Innovative Smart Grid Technologies Conference Europe (ISGT Europe), 1–6, (2010)
J.A Peas Lopes et.al., Identifying management procedures to deal with connection of Electric Vehicles in the grid, PowerTech, 2009 IEEE Bucharest, 1–8, (2009)
Else Veldman and Remco A. Verzijlbergh, Distribution Grid Impacts of Smart Electric Vehicle Charging From Different Perspectives, IEEE Transactions on Smart Grid, 333–342, (2015)
K. Clement-Nyns et.al., The Impact of Charging Plug-In Hybrid Electric Vehicles on a Residential Distribution Grid, IEEE Transactions on Power Systems, 371–380, (2010)
Kilian Dallmer-Zerbe et.al., Analysis of the Exploitation of EV Fast Charging to Prevent Extensive Grid Investments in Suburban Areas, Energy Technology, 54–63, (2014)
Mehrdad Ehsani et.al., Vehicle to Grid Services: Potential and Applications, Energies, 4076–4090, (2012)
Shaojun Huang et.al., Voltage support from electric vehicles in distribution grid, Power Electronics and Applications (EPE), 2013 15th European Conference on, 1–8, (2013)
David Dallinger et.al., Plug-in electric vehicles automated charging control, http://www.isi.fraunhofer.de/isi-wAssets/docs/e-x/working-papers-sustainability-and-innovation/WP04-2015_PEV-automated-charging-control_marwitz_dallinger_wesche-et-al.pdf, (2015)
David Dallinger, Plug-in electric vehicles integrating fluctuating renewable electricity, PhD thesis, Universität Kassel, (2012)
Lutz Hillemacher, Lastmanagement mittels dynamischer Strompreissignale bei Haushaltskunden, PhD thesis, Karlsruhe, Karlsruher Institut für Technologie (KIT), (2014)
DOE, Benefits of demand response in electricity markets and recommendations for achieving them, (2006)
Lunci Hua et.al., Adaptive Electric Vehicle Charging Coordination on Distribution Network, IEEE Transactions on Smart Grid, 2666–2675, (2014)
S. Iacovella et.al., Double-layered control methodology combining price objective and grid constraints, 2013 IEEE International Conference on Smart Grid Communications (SmartGridComm), 25–30, (2013)
Sekyung Han et.al., Development of an Optimal Vehicle-to-Grid Aggregator for Frequency Regulation, IEEE Transactions on Smart Grid, 65–72, (2010)
David Dallinger and Martin Wietschel, Grid integration of intermittent renewable energy sources using price-responsive plug-in electric vehicles, Renewable and Sustainable Energy Reviews, 3370–3382, (2012)
Frank A. Wolak, An experimental comparison of critical peak and hourly pricing: the PowerCentsDC program, Department of Economics Stanford University, (2010)
Der Verband kommunaler Unternehmen, Stellungnahme zur Ausgestaltung des §14a EnWG auf Basis der Aufgabenstellung des BMWi vom 26.03.2013, (2013)
European Committee for Electrotechnical Standardization, Voltage characteristics of electricity supplied by public distribution systems: English version, Draft May 2005
Energie Argentur NRW, Erhebung: Wo im Haushalt bleibt der Strom? Anteile, Verbrauchswerte und Kosten von 12 Verbrauchsbereichen in Ein- bis Sechs-Personen-Haushalten, (2011), http://www.energieagentur.nrw.de/presse/singles-verbrauchen-strom-anders-15327.asp
Verein Deutscher Ingenieure e.V., Referenzlastprofile von Ein- und Mehrfamilien-häusern für den Einsatz von KWK-Anlagen: VDI 4655, Mai 2008,
AEG Nachtspeicherofen 3 kW WSP 3010, http://www.hme-technik.de/aeg-nachtspeicherofen-3-kw-wsp-3010.html, last checked: 2015–08–27
I. Sartori and A. G. Hestnes, Energy use in the life cycle of conventional and low-energy buildings: A review article, Energy and Buildings, 249–257, (2007)
Pacific Gas and Electric, Electric vehicle time of the use tariff, http://www.sdge.com/clean-energy/ev-rates, (2014)
Martin Braun, Provision of Ancillary Services by Distributed Generators: Technological and Economic Perspective, PhD thesis, (2008)
J. G. Slootweg et.al. Sensing and control challenges for Smart Grids, 2011 International Conference on Networking, Sensing and Control (ICNSC), 1–7, (2011)
Acknowledgements
This work has been financed by the “Stiftung Energieforschung Baden-Wrttemberg”. We thank the foundation members for their support. We also thank Barbara Sinnemann and two anonymous reviewers for critically reading the manuscript.
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2017 Springer International Publishing AG
About this paper
Cite this paper
Marwitz, S., Klobasa, M., Dallinger, D. (2017). Comparison of Control Strategies for Electric Vehicles on a Low Voltage Level Electrical Distribution Grid. In: Bertsch, V., Fichtner, W., Heuveline, V., Leibfried, T. (eds) Advances in Energy System Optimization. Trends in Mathematics. Birkhäuser, Cham. https://doi.org/10.1007/978-3-319-51795-7_2
Download citation
DOI: https://doi.org/10.1007/978-3-319-51795-7_2
Published:
Publisher Name: Birkhäuser, Cham
Print ISBN: 978-3-319-51794-0
Online ISBN: 978-3-319-51795-7
eBook Packages: Mathematics and StatisticsMathematics and Statistics (R0)