
Abstract
Recently, Leonov and Kuznetsov have introduced a new definition “hidden attractor”. Systems with hidden attractors, especially chaotic systems, have attracted significant attention. Some examples of such systems are systems with a line equilibrium, systems without equilibrium or systems with stable equilibria etc. In some interesting new research, systems in which equilibrium points are located on different special curves are reported. This chapter introduces a three-dimensional autonomous system with a square-shaped equilibrium and without equilibrium points. Therefore, such system belongs to a class of systems with hidden attractors. The fundamental dynamics properties of such system are studied through phase portraits, Poincaré map, bifurcation diagram, and Lyapunov exponents. Anti-synchronization scheme for our systems is proposed and confirmed by the Lyapunov stability. Moreover, an electronic circuit is implemented to show the feasibility of the mathematical model. Finally, we introduce the fractional order form of such system.
Access provided by CONRICYT-eBooks. Download chapter PDF
Similar content being viewed by others

Keywords
- Chaos
- Hidden attractor
- No-equilibrium
- Square equilibrium
- Lyapunov exponents
- Bifurcation
- Synchronization
- Circuit
- SPICE
1 Introduction
Chaos theory, chaotic systems, and chaos-based applications have been studied in last decades [5,6,7,8, 18, 19, 54, 71, 76, 106]. A significant amount of new chaotic systems has been introduced and discovered such as Lorenz [54], Rössler system [66], Arneodo system [4], Chen system [18], Lü system [55], Vaidyanathan system [83], time-delay systems [11], nonlinear finance system [78], four-scroll chaotic system [2].
Chaotic systems, that are highly sensitive to initial conditions, were applied in different areas. A new four-scroll chaotic system was used to design a random number generator [2]. Tang et al. implemented image encryption using chaotic coupled map lattices with time-varying delays [79]. Reconfiguration chaotic logic gates based on novel chaotic circuit were discovered in [12]. Chenaghlu et al. introduced a novel keyed parallel hashing scheme based on a new chaotic system [20]. Kajbaf et al. proposed fast synchronization of non-identical chaotic modulation-based secure systems using a modified sliding mode controller [38]. A new hybrid algorithm based on chaotic maps for solving systems of nonlinear equations was presented in [44]. Tacha et al. studied analysis, adaptive control and circuit simulation of a novel nonlinear finance system [78]. Performance improvement of chaotic encryption via energy and frequency location criteria was studied in [70]. Orlando investigated a discrete mathematical model for chaotic dynamics in economics [58].
Recent developments include systems with hidden attractors which are important in engineering applications [34, 35, 48, 61, 85, 110, 112]. Especially, chaotic systems with hidden attractors such as chaotic systems without any equilibrium points, chaotic systems with infinitely many equilibrium points and chaotic systems with stable equilibria have been introduced [34, 35, 43, 56, 99]. Finding new chaotic systems with different families of hidden attractors should be studied further.
In this chapter, we introduce a novel three-dimensional (3D) chaotic system. Especially the new system displays both hidden chaotic attractor with square equilibrium and hidden chaotic attractor without equilibrium. This chapter is organized as follows. The related works are reported in the next section. Section 3 presents the theoretical model of the new system. Dynamics and properties of the new system are investigated in Sect. 4 while the adaptive anti-synchronization scheme for such new system is proposed in Sect. 5. Section 6 presents circuital implementation of the theoretical model. Moreover, fractional-order form of the new no-equilibrium system is described in Sect. 7. Finally, conclusions are drawn in Sect. 8.
2 Related Work
Recently, Leonov and Kuznetsov have proposed a new approach to classify nonlinear systems. They considered dynamical systems with self-excited attractors and dynamical systems with hidden attractors [46, 48, 50, 51]. A self-excited attractor has a basin of attraction that is excited from unstable equilibria. Therefore, self-excited attractors can be localized numerically by using the standard computational procedure. In contrast, hidden attractor cannot be found by using a numerical method in which a trajectory started from a point on the unstable manifold in the neighbourhood of an unstable equilibrium [34, 48]. “Hidden attractor” is important both in nonlinear theory and practical problems [45, 50, 60, 63, 69]. Thus various researches relating hidden attractors have been introduced [16, 36, 68, 73].
Hidden attractors have discovered in a smooth Chua’s system [52], in mathematical model of drilling system [49], in a relay system with hysteresis [112], in nonlinear control systems [47], in Van der Pol-Duffing oscillators [16], in a simple four-dimensional system [105], in an impulsive Goodwin oscillator with time delay [111] or in a multilevel DC/DC converter [110]. In addition, hidden chaotic attractors are observed in 3-D chaotic autonomous system with only one stable equilibrium [43], in elementary quadratic chaotic flows with no equilibria [35], in simple chaotic flows with a line equilibrium [34], in a 4-D Rikitake dynamo system [97], in 5-D hyperchaotic Rikitake dynamo system [95], in a 5-D Sprott B system [57], in a chaotic system with an exponential nonlinear term [62] or in a system with memristive devices [10].
It is interesting that chaotic systems with an infinite number of equilibrium points or without equilibrium belong to a class of dynamical systems with “hidden attractor” [35]. A few three-dimensional chaotic systems with infinite equilibria and without equilibrium have been reported. Jafari and Sprott found chaotic flows with a line equilibrium [34]. New class of chaotic systems with circular equilibrium was presented in [26]. Gotthans et al. introduced a 3-D chaotic system with a square equilibrium in [27]. By applying a tiny perturbation into the Sprott D system, Wei obtained a new system with no equilibria [101]. Wang and Chen proposed a no-equilibrium system when constructing a chaotic system with any number of equilibria [100]. Especially, Jafari et al. found a gallery of chaotic flows with no equilibria [35]. However, investigation of new systems which can display both hidden chaotic attractors with infinite equilibria and hidden chaotic attractors without equilibrium is still an attractive research direction.
3 Model of the No-Equilibrium System
Gotthans et al. proposed an interesting three-dimensional chaotic system with a square equilibrium [27]. Gotthans’s system is given by
where x, y, z are state variables, while a, b are two positive parameters. System (1) is the simplest system with a square equilibrium and chaotic behavior. Moreover it is an example of a system with hidden attractor [27].
In this work, we study a new 3-D system based on system (1):
in which x, y, z are state variables and a, b, c are three positive parameters. Dynamics and properties of new nonlinear system (2) are studied in the next section.
4 Dynamics and Properties of the Proposed System
The equilibrium points of system (2) are found by solving \(\dot{x} = 0\), \(\dot{y} = 0\), and \(\dot{z} = 0\). Therefore, we have
From (3), (4), we have \(z=0\) and
Therefore system (2) has an infinite number of equilibrium points when \(c=0\). Moreover equilibrium points are located on a square (5). This case has been studied in [27], so we do not discuss about it. We focus on the case for \( c \ne 0\). Obviously, Eq. (6) is inconsistent when \( c \ne 0\). On the other word, there is no real equilibrium in system (2). Interestingly, system (2) belongs to a newly introduced class of systems with hidden attractors because its basin of attractor does not contain neighbourhoods of equilibria [48, 50].
We consider the new system (2) for the selected parameters \(a=5\), \(b=3 \), \(c=0.02 \) and the initial conditions are
Lyapunov exponents, which measure the exponential rates of the divergence and convergence of nearby trajectories in the phase space of the chaotic system [72, 76], are calculated by using the algorithm in [104]. As a result, the Lyapunov exponents of the system (2) are
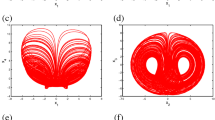
The 2-D and 3-D projections of the chaotic attractors without equilibrium in this case are illustrated in Figs. 1, 2, 3 and 4.

2-D projection of system (2) in the (x, y)-plane, for \(a=5\), \(b=3 \), \(c=0.02 \)

2-D projection of system (2) in the (x, z)-plane, for \(a=5\), \(b=3 \), \(c=0.02 \)
It has been known that the Kaplan–Yorke fractional dimension, which presents the complexity of attractor [23], is given by
where j is the largest integer satisfying \( \sum \limits _{i = 1}^j {{\lambda _i} \ge 0} \) and \( \sum \limits _{i = 1}^{j + 1} {{\lambda _i} < 0} \). Thus, the calculated fractional dimension of no-equilibrium system (2) when \(a=5\), \(b=3 \), \(c=0.02 \) is
Equation (10) indicates a strange attractor. In addition, as seen in Fig. 5, the Poincaré map of system (2) in the (x, y)-plane also illustrates the strange of attractor.

2-D projection of system (2) in the (y, z)-plane, for \(a=5\), \(b=3 \), \(c=0.02 \)

3-D projection of system (2) in the (x, y, z)-space, for \(a=5\), \(b=3 \), \(c=0.02 \)

Poincaré map of system (2) in the (x, y)-plane, for \(a=5\), \(b=3 \), \(c=0.02 \)
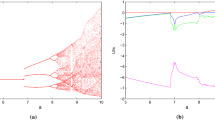
The bifurcation diagram provides a useful tool in nonlinear science. It gives the change of system’s dynamical behavior. In more details, Fig. 6 presents the bifurcation diagram of the variable y versus the parameter c. The system’s complexity has also been verified by the corresponding diagram of largest Lyapunov exponents versus the parameter c (see Fig. 7). In the regions where the value of the largest Lyapunov exponent is equal to zero the system is in a periodic state, while in the regions where the largest Lyapunov exponent has a positive value the system is in a chaotic state. As seen in Fig. 6, there is a reverse period doubling to chaos when increasing the value of parameter c from 0 to 0.15. When \( c < 0.057\) a more complex behavior is emerged. For example, system exhibits chaotic behavior for \( c < 0.039\). When \( c > 0.057\) the system remains always in periodic states. For instant, system presents periodic behavior for \(c = 0.1\) (see Fig. 8).

Bifurcation diagram of system (2) when changing c for \(a = 5\), \(b = 3\)

Largest Lyapunov exponent of system (2) when varying c for \(a = 5\), \(b = 3\)

Limit cycle of system (2) for \(a = 5\), \(b = 3\), and \(c = 0.1\)
5 Adaptive Anti-synchronization of the Proposed System
Synchronization of nonlinear systems has been discovered extensively in literature because of its vital practical applications [13, 17, 22, 24, 39, 40, 59, 63, 74, 84, 86, 87, 94, 109]. Results about synchronization of various systems are reported such as synchronized states in a ring of mutually coupled self-sustained nonlinear electrical oscillators [103], ragged synchronizability of coupled oscillators [75], various synchronization phenomena in bidirectionally coupled double-scroll circuits [98], observer for synchronization of chaotic systems with application to secure data transmission was studied in [1], or shape synchronization control [33]. Futhermore different kind of synchronizations have been investigated, for example lag synchronization [65], frequency synchronization [3], projective-anticipating synchronization [31], anti-synchronization [82], adaptive synchronization [88,89,90,91, 93, 96], hybrid chaos synchronization [40], generalized projective synchronization [92], fuzzy synchronization [14, 15] or fast synchronization [38] etc. Interestingly, anti-synchronization has received significant attention [32, 42, 82, 108]. Anti-synchronization indicates the relationship between two oscillating systems that have the same absolute values at all times, but opposite signs [32, 42, 108].
In this section, the adaptive anti-synchronization of identical proposed systems with three unknown parameters is proposed. The newly introduced system (2) is considered as the master system:
in which \(x_1\), \(y_1\), \(z_1\) are state variables. The slave system is considered as the controlled system and its dynamics is described by:
where \(x_2\), \(y_2\), \(z_2\) are the states of the slave system. Here the adaptive controls are \(u_x\), \(u_y\), and \(u_z\). These controls will be designed for the anti-synchronization of the master and slave systems. We used A(t), B(t) and C(t) in order to estimate unknown parameters a, b and c.
The anti-synchronization error between systems (11) and (12) is given by the following relation
As a result, the anti-synchronization error dynamics is described by
Our aim is to construct the appropriate controllers \(u_x\), \(u_y\), \(u_z\) to stabilize system (14). Therefore, we propose the following controllers for system (14):
in which \(k_x\), \(k_y\), \(k_z\) are positive gain constants for each controllers and the estimate values for unknown system parameters are A(t), B(t), and C(t). The update laws for the unknown parameters are determined as
Then, the main result of this section will be introduced and proved.
Theorem 5.1
If the adaptive controller (15) and the updating laws of parameter (16) are chosen, the anti-sychronization between the master system (11) and the slave system (12) is achieved.
Proof
It is noting that the parameter estimation errors \(e_a(t)\), \(e_b(t)\) and \(e_c(t)\) are given as
Differentiating (17) with respect to t, we have
Substituting adaptive control law (15) into (14), the closed-loop error dynamics is defined as
Then substituting (17) into (19), we have
We consider the Lyapunov function given as
The Lyapunov function (21) is clearly definite positive.
Taking time derivative of (21) along the trajectories of (13) and (17) we have
From (18), (20), and (22) we get
Then by applying the parameter update law (16), Eq. (23) become
Obviously, the time-derivative of the Lyapunov function V is negative semi-definite. According to Barbalat’s lemma in the Lyapunov stability theory [41, 67], it follows that \( {e_x}\left( t \right) \rightarrow 0 \), \( {e_y}\left( t \right) \rightarrow 0 \), and \( {e_z}\left( t \right) \rightarrow 0 \), exponentially when \( t \rightarrow 0 \). That is, anti-synchronization between master and slave system exponentially. This completes the proof. \(\square \)
A numerical example is presented to illustrate the effectiveness of our proposed anti-synchronization scheme. The parameters of the no-equilibrium systems are selected as \( a=5 \), \( b=3 \), \( c=0.02 \) and the positive gain constant as \( k=6 \). The initial conditions of the master system (11) and the slave system (12) have been chosen as \( {x_1}\left( 0 \right) = 0 \), \( {y_1}\left( 0 \right) = 0 \), \( {z_1}\left( 0 \right) = 0 \), and \( {x_2}\left( 0 \right) = 0.5 \), \( {y_2}\left( 0 \right) = 1 \), \( {z_2}\left( 0 \right) = 0.9 \), respectively. We assumed that the initial values of the parameter estimates are \(A\left( 0 \right) = 10\), \(B\left( 0 \right) = 2\), and \(C\left( 0 \right) = 0\).
It is easy to see that when adaptive control law (15) and the update law for the parameter estimates (16) are applied, the anti-synchronization of the master (11) and slave system (12) occurred as illustrated in Figs. 9, 10 and 11. Time series of master states are denoted as blue solid lines while corresponding slave states are plotted as red dash-dot lines in such figures. Moreover, the time-history of the anti-synchronization errors \(e_{x}\), \(e_{y}\), and \(e_{z}\) is reported in Fig. 12. The anti-synchronization errors converge to the zero. Therefore the chaos anti-synchronization between the no-equilibrium systems is realized.

Anti-synchronization of the states \(x_1(t)\) and \(x_2(t)\)

Anti-synchronization of the states \(y_1(t)\) and \(y_2(t)\)

Anti-synchronization of the states \(z_1(t)\) and \(z_2(t)\)

Time series of the anti-synchronization errors \(e_{x}\), \(e_{y}\), and \(e_{z}\)
6 Electronic Circuit of the Proposed System
Implementation of theoretical chaotic model by electronic circuits is an approach to confirm the feasibility of the theoretical one [2, 64, 78, 97]. In this section, we choose integrator synthesis to synthesize a circuit from the differential equations in system (2) as shown in Fig. 13.
As seen in Fig. 13, there are only some basic blocks such as integrators, summing amplifiers, multipliers or absolute value blocks. These blocks have been realized easily by electronic components (resistors, capacitors, operational amplifiers, analog multipliers). As a result, the circuit have been implemented in PSpice as illustrated in Fig. 14. Signals in the circuit are measured at the outputs of inverting integrators. Figures 15, 16, 17 present the obtained PSpice results. The designed circuit emulates well the theoretical model.

Block schematic to synthesize the circuit of system (2)

Observation of the electronic circuit implemented by using PSpice

PSpice phase portrait of the circuit in \(-V(-x) - V(y)\) plane

PSpice phase portrait of the circuit in \(-V(-x) - V(z)\) plane

PSpice phase portrait of the circuit in \(V(y) - V(z)\) plane
7 Fractional Order Form of the No-Equilibrium System
As have been known that practical models such as heat conduction, electrode-electrolyte polarization, electronic capacitors, dielectric polarization, viso-elastic systems are more adequately described by the fractional-order different equations [9, 30, 37, 77, 81, 102]. Adams-Bashforth-Mounlton numerical algorithm is often used to investigate fractional-order differential equations [21, 25, 80]. Here we present this algorithm briefly.
We consider the fractional-order differential equation as follows:
where \(m - 1 < q \le m \in {Z^ + }\). Equation (25) is equivalent to the following Volterra integral equation:
in which the Gamma function \(\varGamma \left( . \right) \) is defined as
We set \(h = \frac{T}{N}\), \(N \in {Z^ + }\), and \({t_n} = nh\;\;\left( {n = 0,1,...,N} \right) \). So we can discrete Eq. (26) as follows
where
It is noting that the predicted value \(x_h^p\left( {{t_{n + 1}}} \right) \) is calculated as
in which
Here the estimation error e in the method is given by
with \(p = \min \left( {2,1 + q} \right) \).
Existence of chaos in fractional-order systems are investigated [28, 29, 53, 107]. In this section, we consider the fractional-order from of the no-equilibrium system which is described as
where a, b, c are three positive parameters and \( c \ne 0\) for the commensurate order \( 0< q \le 1 \). Fractional-order system (33) has been studied by applying Adams-Bashforth-Mounlton numerical algorithm [21, 25, 80]. It is interesting that chaos exists in fractional-order system (33). Figures 18, 19, 20 display chaotic attractors generated from fractional-order system (33) for the commensurate order \(q=0.999\), the parameters \(a = 5\), \(b = 3\), \(c = 0.02\) and the initial conditions
However, when decreasing the value of the commensurate order i.e. \(q=0.995\), fractional-order system (33) generates limit cycles as illustrated in Fig. 21.

2-D projection of the fractional-order system (33) in the (x, y)-plane

2-D projection of the fractional-order system (33) in the (x, z)-plane

2-D projection of the fractional-order system (33) in the (y, z)-plane

3-D projection of the fractional-order system (33) in the (x, y, z)-space for the commensurate order \(q=0.995\), the parameters \(a = 5\), \(b = 3\), \(c = 0.02\), and the initial conditions \(\left( {x\left( 0 \right) , y\left( 0 \right) , z\left( 0 \right) } \right) = \left( {0,0,0} \right) \)
8 Conclusion
A new three-dimensional autonomous system is proposed in this chapter. This system can exhibit chaotic attractors with square equilibrium and without equilibrium. As a result, such system is considered as a system with “hidden attractor”. Fundamental dynamical properties of the introduced system are investigated through calculating equilibrium points, phase portraits of chaotic attractors, Poincaré map, bifurcation diagram, largest Lyapunov exponents and Kaplan-Yorke dimension. Moreover, synchronization and electronic implementation of our novel system are discussed and verified by numerical examples. This work is not only to present a new system with hidden attractors but also to extend the knowledge about systems with different families of hidden attractors. Other chaotic systems with different families of hidden attractors will be presented in our next researches. In addition, further studies about potential applications of such system in secure communications and cryptography will be done in our future works.
References
Aguilar-Lopez, R., Martinez-Guerra, R., & Perez-Pinacho, C. (2014). Nonlinear observer for synchronization of chaotic systems with application to secure data transmission. The European Physical Journal Special Topics, 223, 1541–1548.
Akgul, A., Moroz, I., Pehlivan, I., & Vaidyanathan, S. (2016). A new four-scroll chaotic attractor and its enginearing applications. Optik, 127, 5491–5499.
Akopov, A., Astakhov, V., Vadiasova, T., Shabunin, A., & Kapitaniak, T. (2005). Frequency synchronization in clusters in coupled extended systems. Physics Letters A, 334, 169–172.
Arneodo, A., Coullet, P., & Tresser, C. (1981). Possible new strange attractors with spiral structure. Communications in Mathematical Physics, 79, 573–579.
Azar, A. T., & Vaidyanathan, S. (2015). Chaos modeling and control systems design. Germany: Springer.
Azar, A. T., & Vaidyanathan, S. (2015). Computational intelligence applications in modeling and control. Germany: Springer.
Azar, A. T., & Vaidyanathan, S. (2015). Handbook of research on advanced intelligent control engineering and automation. USA: IGI Global.
Azar, A. T., & Vaidyanathan, S. (2016). Advances in chaos theory and intelligent control. Germany: Springer.
Bagley, R. L., & Calico, R. A. (1991). Fractional-order state equations for the control of visco-elastically damped structers. Journal of Guidance, Control, and Dynamics, 14, 304–311.
Bao, B., Zou, X., Liu, Z., & Hu, F. (2013). Generalized memory element and chaotic memory system. International Journal of Bifurcation and Chaos, 23, 1350135.
Barnerjee, T., Biswas, D., & Sarkar, B. C. (2012). Design and analysis of a first order time-delayed chaotic system. Nonlinear Dynamics, 70, 721–734.
Behnia, S., Pazhotan, Z., Ezzati, N., & Akhshani, A. (2014). Reconfiguration chaotic logic gates based on novel chaotic circuit. Chaos, Solitons and Fractals, 69, 74–80.
Boccaletti, S., Kurths, J., Osipov, G., Valladares, D. L., & Zhou, C. S. (2002). The synchronization of chaotic systems. Physics Reports, 366, 1–101.
Boulkroune, A., Bouzeriba, A., Bouden, T., & Azar, A. T. (2016). Fuzzy adaptive synchronization of uncertain fractional-order chaotic systems. In A. T. Azar & S. Vaidyanathan (Eds.), Advances in chaos theory and intelligent control (Vol. 337, pp. 681–697). Studies in fuzziness and soft computing. Springer: Germany.
Boulkroune, A., Hamel, S., & Azar, A. T. (2016). Fuzzy control-based function synchronization of unknown chaotic systems with dead-zone input. In A. T. Azar & S. Vaidyanathan (Eds.), Advances in chaos theory and intelligent control (Vol. 337, pp. 699–718). Studies in fuzziness and soft computing. Springer: Germany.
Brezetskyi, S., Dudkowski, D., & Kapitaniak, T. (2015). Rare and hidden attractors in van der pol-duffing oscillators. The European Physical Journal Special Topics, 224, 1459–1467.
Buscarino, A., Fortuna, L., & Frasca, M. (2009). Experimental robust synchronization of hyperchaotic circuits. Physica D, 238, 1917–1922.
Chen, G., & Ueta, T. (1999). Yet another chaotic attractor. International Journal of Bifurcation and Chaos, 9, 1465–1466.
Chen, G., & Yu, X. (2003). Chaos control: Theory and applications. Berlin: Springer.
Chenaghlu, M. A., & Khasmakhi, S. J. N. N. (2016). A novel keyed parallel hashing scheme based on a new chaotic system. Chaos, Solitons and Fractals, 87, 216–225.
Diethelm, K., Ford, N. J., & Freed, A. D. (2002). A predictor-corrector approach for the numerical solution of fractional differential equations. Nonlinear Dynamics, 29, 3–22.
Fortuna, L., & Frasca, M. (2007). Experimental synchronization of single-transistor-based chaotic circuits. Chaos, 17, 043118-1–5.
Frederickson, P., Kaplan, J. L., Yorke, E. D., & York, J. (1983). The Lyapunov dimension of strange attractors. Journal of Differential Equations, 49, 185–207.
Gamez-Guzman, L., Cruz-Hernandez, C., Lopez-Gutierrez, R., & Garcia-Guerrero, E. E. (2009). Synchronization of Chua’s circuits with multi-scroll attractors: Application to communication. Communications in Nonlinear Science and Numerical Simulation, 14, 2765–2775.
Gejji, D., & Jafari, H. (2005). A domian decomposition: A tool for solving a system of fractional differential equations. Journal of Mathematical Analysis and Applications, 301, 508–518.
Gotthans, T., & Petržela, J. (2015). New class of chaotic systems with circular equilibrium. Nonlinear Dynamics, 73, 429–436.
Gotthans, T., Sportt, J. C., & Petržela, J. (2016). Simple chaotic flow with circle and square equilibrium. International Journal of Bifurcation and Chaos, 26, 1650137.
Grigorenko, I., & Grigorenko, E. (2003). Chaotic dynamics of the fractional-order lorenz system. Physical Review Letters, 91, 034101.
Hartley, T. T., Lorenzo, C. F., & Qammer, H. K. (1995). Chaos on a fractional Chua’s system. IEEE Transactions on Circuits and Systems I: Fundamental Theory and Applications, 42, 485–490.
Heaviside, O. (1971). Electromagnetic theory. New York, USA: Academic Press.
Hoang, T. M., & Nakagawa, M. (2007). Anticipating and projective–anticipating synchronization of coupled multidelay feedback systems. Physics Letters A, 365, 407–411.
Hu, J., Chen, S., & Chen, L. (2005). Adaptive control for anti-synchronization of Chua’s chaotic system. Physics Letters A, 339, 455–460.
Huang, Y., Wang, Y., Chen, H., & Zhang, S. (2016). Shape synchronization control for three-dimensional chaotic systems. Chaos, Solitons and Fractals, 87, 136–145.
Jafari, S., & Sprott, J. C. (2013). Simple chaotic flows with a line equilibrium. Chaos, Solitons and Fractals, 57, 79–84.
Jafari, S., Sprott, J. C., & Golpayegani, S. M. R. H. (2013). Elementary quadratic chaotic flows with no equilibria. Physics Letters A, 377, 699–702.
Jafari, S., Sprott, J. C., & Nazarimehr, F. (2015). Recent new examples of hidden attractors. The European Physical Journal Special Topics, 224, 1469–1476.
Jenson, V. G., & Jeffreys, G. V. (1997). Mathematical methods in chemical engineering. New York, USA: Academic Press.
Kajbaf, A., Akhaee, M. A., & Sheikhan, M. (2016). Fast synchronization of non-identical chaotic modulation-based secure systems using a modified sliding mode controller. Chaos, Solitons and Fractals, 84, 49–57.
Kapitaniak, T. (1994). Synchronization of chaos using continuous control. Physical Review E, 50, 1642–1644.
Karthikeyan, R., & Vaidyanathan, S. (2014). Hybrid chaos synchronization of four-scroll systems via active control. Journal of Electrical Engineering, 65, 97–103.
Khalil, H. (2002). Nonlinear systems. New Jersey, USA: Prentice Hall.
Kim, C. M., Rim, S., Kye, W. H., Ryu, J. W., & Park, Y. J. (2003). Anti-synchronization of chaotic oscillators. Physics Letters A, 320, 39–46.
Kingni, S. T., Jafari, S., Simo, H., & Woafo, P. (2014). Three-dimensional chaotic autonomous system with only one stable equilibrium: Analysis, circuit design, parameter estimation, control, synchronization and its fractional-order form. The European Physical Journal Plus, 129, 76.
Koupaei, J. A., & Hosseini, S. M. M. (2015). A new hybrid algorithm based on chaotic maps for solving systems of nonlinear equations. Chaos, Solitons and Fractals, 81, 233–245.
Kuznetsov, N. V., Leonov, G. A., & Seledzhi, S. M. (2011). Hidden oscillations in nonlinear control systems. IFAC Proceedings, 18, 2506–2510.
Leonov, G. A., & Kuznetsov, N. V. (2011). Algorithms for searching for hidden oscillations in the Aizerman and Kalman problems. Doklady Mathematics, 84, 475–481.
Leonov, G. A., & Kuznetsov, N. V. (2011). Analytical–numerical methods for investigation of hidden oscillations in nonlinear control systems. IFAC Proceedings, 18, 2494–2505.
Leonov, G. A., & Kuznetsov, N. V. (2013). Hidden attractors in dynamical systems: From hidden oscillation in Hilbert-Kolmogorov, Aizerman and Kalman problems to hidden chaotic attractor in Chua circuits. International Journal of Bifurcation and Chaos, 23, 1330002.
Leonov, G. A., Kuznetsov, N. V., Kiseleva, M. A., Solovyeva, E. P., & Zaretskiy, A. M. (2014). Hidden oscillations in mathematical model of drilling system actuated by induction motor with a wound rotor. Nonlinear Dynamics, 77, 277–288.
Leonov, G. A., Kuznetsov, N. V., Kuznetsova, O. A., Seldedzhi, S. M., & Vagaitsev, V. I. (2011). Hidden oscillations in dynamical systems. Transmission Systems Control, 6, 54–67.
Leonov, G. A., Kuznetsov, N. V., & Vagaitsev, V. I. (2011). Localization of hidden Chua’s attractors. Physics Letters A, 375, 2230–2233.
Leonov, G. A., Kuznetsov, N. V., and Vagaitsev, V. I. (2012). Hidden attractor in smooth Chua system. Physica D, 241, 1482–1486.
Li, C. P., & Peng, G. J. (2004). Chaos in Chen’s system with a fractional-order. Chaos, Solitons and Fractals, 20, 443–450.
Lorenz, E. N. (1963). Deterministic non-periodic flow. Journal of Atmospheric Science, 20, 130–141.
Lü, J., & Chen, G. (2002). A new chaotic attractor coined. International Journal of Bifurcation and Chaos, 12, 659–661.
Molaei, M., Jafari, S., Sprott, J. C., & Golpayegani, S. (2013). Simple chaotic flows with one stable equilibrium. International Journal of Bifurcation and Chaos, 23, 1350188.
Ojoniyi, O. S., & Njah, A. N. (2016). A 5D hyperchaotic Sprott B system with coexisting hidden attractor. Chaos, Solitons and Fractals, 87, 172–181.
Orlando, G. (2016). A discrete mathematical model for chaotic dynamics in economics: Kaldor’s model on business cycle. Mathematics and Computers in Simulation, 125, 83–98.
Pecora, L. M., & Carroll, T. L. (1990). Synchronization in chaotic signals. Physical Review A, 64, 821–824.
Pham, V.-T., Jafari, S., Volos, C., Wang, X., & Golpayegani, S. M. R. H. (2014). Is that really hidden? The presence of complex fixed-points in chaotic flows with no equilibria. International Journal of Bifurcation and Chaos, 24, 1450146.
Pham, V.-T., Vaidyanathan, S., Volos, C. K., Hoang, T. M., & Yem, V. V. (2016). Dynamics, synchronization and SPICE implementation of a memristive system with hidden hyperchaotic attractor. In A. T. Azar & S. Vaidyanathan (Eds.), Advances in chaos theory and intelligent control. Studies in fuzziness and soft computing (Vol. 337, pp. 35–52). Germany: Springer.
Pham, V. T., Vaidyanathan, S., Volos, C. K., & Jafari, S. (2015). Hidden attractors in a chaotic system with an exponential nonlinear term. The European Physical Journal Special Topics, 224, 1507–1517.
Pham, V.-T., Volos, C. K., Jafari, S., Wei, Z., & Wang, X. (2014). Constructing a novel no-equilibrium chaotic system. International Journal of Bifurcation and Chaos, 24, 1450073.
Pham, V. T., Volos, C. K., Vaidyanathan, S., Le, T. P., & Vu, V. Y. (2015). A memristor-based hyperchaotic system with hidden attractors: Dynamics, sychronization and circuital emulating. Journal of Engineering Science and Technology Review, 8, 205–214.
Rosenblum, M. G., Pikovsky, A. S., & Kurths, J. (1997). From phase to lag synchronization in coupled chaotic oscillators. Physical Review Letters, 78, 4193–4196.
Rössler, O. E. (1976). An equation for continuous chaos. Physics Letters A, 57, 397–398.
Sastry, S. (1999). Nonlinear systems: Analysis, stability, and control. USA: Springer.
Shahzad, M., Pham, V. T., Ahmad, M. A., Jafari, S., & Hadaeghi, F. (2015). Synchronization and circuit design of a chaotic system with coexisting hidden attractors. The European Physical Journal Special Topics, 224, 1637–1652.
Sharma, P. R., Shrimali, M. D., Prasad, A., Kuznetsov, N. V., & Leonov, G. A. (2015). Control of multistability in hidden attractors. The European Physical Journal Special Topics, 224, 1485–1491.
Soriano-Sanchez, A. G., Posadas-Castillo, C., Platas-Garza, M. A., & Diaz-Romero, D. A. (2015). Performance improvement of chaotic encryption via energy and frequency location criteria. Mathematics and Computers in Simulation, 112, 14–27.
Sprott, J. C. (2003). Chaos and times-series analysis. Oxford: Oxford University Press.
Sprott, J. C. (2010). Elegant chaos: Algebraically simple chaotic flows. Singapore: World Scientific.
Sprott, J. C. (2015). Strange attractors with various equilibrium types. The European Physical Journal Special Topics, 224, 1409–1419.
Srinivasan, K., Senthilkumar, D. V., Murali, K., Lakshmanan, M., & Kurths, J. (2011). Synchronization transitions in coupled time-delay electronic circuits with a threshold nonlinearity. Chaos, 21, 023119.
Stefanski, A., Perlikowski, P., & Kapitaniak, T. (2007). Ragged synchronizability of coupled oscillators. Physical Review E, 75, 016210.
Strogatz, S. H. (1994). Nonlinear dynamics and chaos: With applications to physics, biology, chemistry, and engineering. Massachusetts: Perseus Books.
Sun, H. H., Abdelwahad, A. A., & Onaral, B. (1894). Linear approximation of transfer function with a pole of fractional-order. IEEE Transactions on Automatic Control, 29, 441–444.
Tacha, O. I., Volos, C. K., Kyprianidis, I. M., Stouboulos, I. N., Vaidyanathan, S., & Pham, V. T. (2016). Analysis, adaptive control and circuit simulation of a novel nonlineaar finance system. Applied Mathematics and Computation, 276, 200–217.
Tang, Y., Wang, Z., & Fang, J. A. (2010). Image encryption using chaotic coupled map lattices with time-varying delays. Communications in Nonlinear Science and Numerical Simulation, 15, 2456–2468.
Tavazoei, M. S., & Haeri, M. (2008). Limitations of frequency domain approximation for detecting chaos in fractional-order systems. Nonlinear Analysis, 69, 1299–1320.
Tavazoei, M. S., & Haeri, M. (2009). A proof for non existence of periodic solutions in time invariant fractional-order systems. Automatica, 45, 1886–1890.
Vaidyanathan, S. (2012). Anti-synchronization of four-wing chaotic systems via sliding mode control. International Journal of Automation and Computing, 9, 274–279.
Vaidyanathan, S. (2013). A new six-term 3-D chaotic system with an exponential nonlineariry. Far East Journal of Mathematical Sciences, 79, 135–143.
Vaidyanathan, S. (2014). Analysis and adaptive synchronization of eight-term novel 3-D chaotic system with three quadratic nonlinearities. The European Physical Journal Special Topics, 223, 1519–1529.
Vaidyanathan, S. (2016). Analysis, control and synchronization of a novel 4-D highly hyperchaotic system with hidden attractors. In A. T. Azar & S. Vaidyanathan (Eds.), Advances in chaos theory and intelligent control (Vol. 337, pp. 529–552). Studies in fuzziness and soft computing. Springer: Germany.
Vaidyanathan, S., & Azar, A. T. (2015). Anti-synchronization of identical chaotic systems using sliding mode control and an application to Vaidhyanathan-Madhavan chaotic systems. Studies in Computational Intelligence, 576, 527–547.
Vaidyanathan, S., & Azar, A. T. (2015). Hybrid synchronization of identical chaotic systems using sliding mode control and an application to Vaidhyanathan chaotic systems. Studies in Computational Intelligence, 576, 549–569.
Vaidyanathan, S., & Azar, A. T. (2016). A novel 4-D four-wing chaotic system with four quadratic nonlinearities and its synchronization via adaptive control method. In A. T. Azar & S. Vaidyanathan (Eds.), Advances in chaos theory and intelligent control. Studies in fuzziness and soft computing (Vol. 337, pp. 203–224). Germany: Springer.
Vaidyanathan, S., & Azar, A. T. (2016). Adaptive backstepping control and synchronization of a novel 3-D jerk system with an exponential nonlinearity. In A. T. Azar & S. Vaidyanathan (Eds.), Advances in chaos theory and intelligent control. Studies in fuzziness and soft computing (Vol. 337, pp. 249–274). Germany: Springer.
Vaidyanathan, S., & Azar, A. T. (2016). Adaptive control and synchronization of Halvorsen circulant chaotic systems. In A. T. Azar & S. Vaidyanathan (Eds.), Advances in chaos theory and intelligent control. Studies in fuzziness and soft computing (Vol. 337, pp. 225–247). Germany: Springer.
Vaidyanathan, S., & Azar, A. T. (2016). Dynamic analysis, adaptive feedback control and synchronization of an eight-term 3-D novel chaotic system with three quadratic nonlinearities. In A. T. Azar & S. Vaidyanathan (Eds.), Advances in chaos theory and intelligent control. Studies in fuzziness and soft computing (Vol. 337, pp. 155–178). Germany: Springer.
Vaidyanathan, S., & Azar, A. T. (2016). Generalized projective synchronization of a novel hyperchaotic four-wing system via adaptive control method. In A. T. Azar & S. Vaidyanathan (Eds.), Advances in chaos theory and intelligent control. Studies in fuzziness and soft computing (Vol. 337, pp. 275–296). Germany: Springer.
Vaidyanathan, S., & Azar, A. T. (2016). Qualitative study and adaptive control of a novel 4-D hyperchaotic system with three quadratic nonlinearities. In A. T. Azar & S. Vaidyanathan (Eds.), Advances in chaos theory and intelligent control. Studies in fuzziness and soft computing (Vol. 337, pp. 179–202). Germany: Springer.
Vaidyanathan, S., Idowu, B. A., & Azar, A. T. (2015). Backstepping controller design for the global chaos synchronization of Sprott’s jerk systems. Studies in Computational Intelligence, 581, 39–58.
Vaidyanathan, S., Pham, V. T., & Volos, C. K. (2015). A 5-d hyperchaotic rikitake dynamo system with hidden attractors. The European Physical Journal Special Topics, 224, 1575–1592.
Vaidyanathan, S., Volos, C., Pham, V. T., Madhavan, K., & Idowo, B. A. (2014). Adaptive backstepping control, synchronization and circuit simualtion of a 3-D novel jerk chaotic system with two hyperbolic sinusoidal nonlinearities. Archives of Control Sciences, 33, 257–285.
Vaidyanathan, S., Volos, C. K., & Pham, V. T. (2015). Analysis, control, synchronization and spice implementation of a novel 4-d hyperchaotic rikitake dynamo system without equilibrium. Journal of Engineering Science and Technology Review, 8, 232–244.
Volos, C. K., Kyprianidis, I. M., & Stouboulos, I. N. (2011). Various synchronization phenomena in bidirectionally coupled double scroll circuits. Communications in Nonlinear Science and Numerical Simulation, 71, 3356–3366.
Wang, X., & Chen, G. (2012). A chaotic system with only one stable equilibrium. Communications in Nonlinear Science and Numerical Simulation, 17, 1264–1272.
Wang, X., & Chen, G. (2013). Constructing a chaotic system with any number of equilibria. Nonlinear Dynamics, 71, 429–436.
Wei, Z. (2011). Dynamical behaviors of a chaotic system with no equilibria. Physics Letters A, 376, 102–108.
Westerlund, S., & Ekstam, L. (1994). Capacitor theory. IEEE Transactions on Dielectrics and Electrical Insulation, 1, 826–839.
Woafo, P., & Kadji, H. G. E. (2004). Synchronized states in a ring of mutually coupled self-sustained electrical oscillators. Physical Review E, 69, 046206.
Wolf, A., Swift, J. B., Swinney, H. L., & Vastano, J. A. (1985). Determining Lyapunov exponents from a time series. Physica D, 16, 285–317.
Xiao-Yu, D., Chun-Biao, L., Bo-Cheng, B., & Hua-Gan, W. (2015). Complex transient dynamics of hidden attractors in a simple 4d system. Chinese Physics B, 24, 050503.
Yalcin, M. E., Suykens, J. A. K., & Vandewalle, J. (2005). Cellular neural networks: Multi-scroll chaos and synchronization. Singapore: World Scientific.
Yang, Q. G., & Zeng, C. B. (2010). Chaos in fractional conjugate lorenz system and its scaling attractor. Communications in Nonlinear Science and Numerical Simulation, 15, 4041–4051.
Zhang, Y., & Sun, J. (2004). Chaotic synchronization and anti-synchronization based on suitable separation. Physics Letters A, 330, 442–447.
Zhu, Q., & Azar, A. T. (2015). Complex system modelling and control through intelligent soft computations. Germany: Springer.
Zhusubaliyev, Z. T., & Mosekilde, E. (2015). Multistability and hidden attractors in a multilevel DC/DC converter. Mathematics and Computers in Simulation, 109, 32–45.
Zhusubaliyev, Z. T., Mosekilde, E., Churilov, A., & Medvedev, A. (2015). Multistability and hidden attractors in an impulsive Goodwin oscillator with time delay. The European Physical Journal Special Topics, 224, 1519–1539.
Zhusubaliyev, Z. T., Mosekilde, E., Rubanov, V. G., & Nabokov, R. A. (2015). Multistability and hidden attractors in a relay system with hysteresis. Physica D, 306, 6–15.
Acknowledgements
Research described in this paper was supported by Czech Ministry of Education in frame of National Sustainability Program under grant GA15-22712S. V.-T. Pham is grateful to Le Thi Van Thu, Philips Electronics—Vietnam, for her help.
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2017 Springer International Publishing AG
About this chapter
Cite this chapter
Pham, VT., Vaidyanathan, S., Volos, C.K., Jafari, S., Gotthans, T. (2017). A Three-Dimensional Chaotic System with Square Equilibrium and No-Equilibrium. In: Azar, A., Vaidyanathan, S., Ouannas, A. (eds) Fractional Order Control and Synchronization of Chaotic Systems. Studies in Computational Intelligence, vol 688. Springer, Cham. https://doi.org/10.1007/978-3-319-50249-6_21
Download citation
DOI: https://doi.org/10.1007/978-3-319-50249-6_21
Published:
Publisher Name: Springer, Cham
Print ISBN: 978-3-319-50248-9
Online ISBN: 978-3-319-50249-6
eBook Packages: EngineeringEngineering (R0)