
Abstract
Textile displays are a commonly investigated topic in the field of interactive textile research. Textile displays allow various display technologies to be embedded in the textile to enhance the textile to display images and animations on the textile. This work explores the development process of non-light-emissive displays using heat-sensitive thermochromic inks. In non-light-emissive textile displays, the display is more subtle and ambient, and has a natural form of color change. To actuate the thermochromic inks, we introduce the use of Peltier semiconductor elements along with a fine-tuned closed-loop temperature control system. The technology describes a robust, fast, and active controllability of the color of fabric. This controllability allows dynamic patterns to be displayed on the actual fabric in a programmable manner which is presented through a wide range of prototypes of textile displays. With the ubiquitous and subtle nature of this textile display system, we envision that it will be able to breathe life into the textiles (and even paper materials) of the future. Hence, we envision that the technology presented through this research would radically challenge the boundaries of current and future textile research and industry.
Access provided by CONRICYT-eBooks. Download chapter PDF
Similar content being viewed by others


Keywords
- Augmented Reality
- Efficient Heat Transfer
- Peltier Element
- Quick Response Code
- Augmented Reality Application
These keywords were added by machine and not by the authors. This process is experimental and the keywords may be updated as the learning algorithm improves.
5.1 Introduction
Textiles are a common form of material we interact with daily as its recorded uses from prehistoric times textiles have become an integral part of our daily lives in the form of our clothes, home furnishing, architecture, and numerous other uses. With the introduction of new concepts and technologies, researchers have begun to embed more and more electronics in textiles [1]. This field of ‘electronic textiles’ or ‘e-textiles’ has created a vast area of research and application spanning from medical applications [2] to education [3] and even to textiles becoming a medium of expression [4].
With this development, a widely explored area of research in e-textiles is textile displays. Here, researchers look into embedding various forms of visual displays in textiles. From large-scale displays [5] to embedded LED (light- emitting diode) displays [6], textile displays have become a common occurrence in this field of research on household textiles, clothes, furniture, etc. Adding a visual display allows the textile to attain another dimension in time allowing its appearance to reconfigure to a certain extent making it a platform for a variety of uses such as social interaction, emotional expression [4], and gaming [7].
Currently, these displays can be categorized as emissive, such as embedding LEDs, electro-luminescent sheets, and wires, or non-emissive, such as using thermally actuated inks. However, the use of emissive technologies in conjunction with textiles renders rather an obtrusive form of a display [8]. Such displays are typically used for more specific purposes to gain people’s attention positively such as in advertising or specific social contexts [5].
Alternatively, this research focuses on a ubiquitous and ambient textile display on which the technology falls to the background and lets the user to interact with the actual textile itself. This minimalism is an important characteristic in designing ubiquitous interfaces where the augmentation of technologies should not obscure the highly defined interaction modalities of the textile [9]. Hence, in this context, non-emissive display technologies have become a primary technology, in which the display does not emit any form of light. Thus, in most cases, the display is the actual fabric itself, where the animations of the display are performed as an unobtrusive and non-emissive color change of the fabric [8].

Overview of the technological components used to implement non-light-emissive animatable textile displays
Most current such non-emissive technologies are non-animatable due to too slow color change. This is a main limitation in enhancing the textile’s capabilities through a non-emissive display as it limits the display’s controllability. Thus, this research explores the engineering of a non-emissive fast color-changing textile display using thermally actuated thermochromic ink and Peltier semiconductor elements as the thermal actuators (Fig. 5.1). A key goal of this research was to innovate a baseline technology that overcomes the boundaries of the current non-emissive ubiquitous displays. By applying this technology to various textile-based prototypes (and some paper scenarios) and diverse applications, we demonstrate extending the daily used textiles into subtly animated interactive textile displays by blending the display technology with fabrics in its natural form.
5.2 Related Works
Works in e-textiles have been around for a period of time. With many fields of application and research explored, these works have focused on many different aspects such as embedding components from conductive elements to sensors itself. Some of the early works in the field demonstrate the embroidery of conductive metallic fabric to form a keyboard [10]. Since then e-textiles have come a long way in enabling to integrate sensors and even switches as integrated fabrics [1, 11]. In line with these technologies, as mentioned above, fabric displays are mainly categorized as emissive and non-emissive displays.
There have been a plenty of work done in the emissive fabric display field. Lumalive by PHILIPS [6] uses LED to implement the fabric display. Here they embed multi-color LEDs in the fabric to form the display. Lumalive has been used with further interactions such as through proximity sensing [7]. Electroluminescent wires and sheets too have been used in many occasions due to its flexibility and ease of integration [12, 13]. In addition, Lumigram [14] displays the use of fiber optics woven in fabric as a display. In more recent works, Berzowska et al. [15] use photonic band gap (PBG) fibers woven in a computer-controlled Jacquard loom during the fabrication process. In ‘The History Tablecloth’ [16], the authors use flexible substrate screen-printed with electroluminescent material forming a grid of lace-like elements. Thus, once the objects are kept on the table, a halo effect is formed on the cloth which is retained for hours indicating the flow of the objects over the table cloth. However, the materials discussed here such as LEDs, BGFs, and electroluminescent materials are regarded as ‘emissive materials’ due to their emission of light [8]. Due to the nature of obtrusiveness of emissive displays, they are more useful for purposes of gaining attention. This is a clear case in Adwalker [5] where a complete display itself is embedded in the fabric.
For a more ambient and subtle approach, non-light-emissive materials such as e-inks, photochromic inks, and thermochromic inks have been used. Most of these works use these specialized inks which are actuated by an external trigger such as temperature, UV light, or force. One of the key recent non-emissive display developments include EInk. There is a work being done which attempts to merge this technology as a flexible display [17]. However, the display here features a transparent electrode layer. In addition, the display itself is attached to the textile by placing it on top of the material; thus, the interaction is not with the actual textile material. In the works of ‘Information Curtain’ [18], the authors use photochromic inks which actuate based on ultraviolet light. They use computer-controlled ultraviolet lights to interact with the textile. These lights create various patterns on the textile which lasts for several minutes upon removal of the light.
Further to these materials, thermochromic inks have been used as a popular material to fabricate non-emissive textile displays. Thermochromic inks too which change the color due to temperature changes are widely adopted due to their ease of use for non-light-emissive displays. In ‘Shimmering Flower’ [19], Bersowska uses thermochromic inks with conductive yarn woven through a Jacquard loom to construct her textile display. When powered up, the conductive yarn heats up and in turn actuates the thermochromic inks to change the color. Hence, this display animates slowly to reveal various colors and patterns on the textile. Bullseye [20] too uses thermochromic inks which are actuated by conductive yarn that is woven into the fabric. In ‘SMOKS’ [21], the jacket is printed with thermochromic ink shoulder pads which, when touched, change the color. This change gradually changes back, thus, keeping the memory of the touch for a certain time. In ‘Reach’ [4], Jacob’s et al. uses thermochromic inks printed scarfs, hats, etc., which change the color based on physical contact. Thus, the ‘SMOKS’ [21] and ‘Reach’ works use the body temperature to change the color of the thermochromic inks. In contrast, Yamada et al. uses infrared LEDs to actuate the thermochromic inks [22]. Here, they use thermochromic inks to digitally change the color of paintings. In the works of, ‘Pure Play’ of ‘Memory Rich Clothing’ [23] use Peltier semiconductor elements to present fast-changing non-light-emissive animations on textiles. Similarly, Mosaic Textile [8] uses liquid crystal inks, which change color due to temperature. This uses sewn conductive yarn to actuate the display. Here, they construct fabric elements of ‘Fabcells’ which contain this technology. These Fabcells are then used as pixels in groups to form the display on the textile.
Almost all of the above non-emissive displays have been used in an omnidirectional manner. That is, these works only use a heating source such as body heat or conductive yarn without any cooling method. Due to this reason, the absolute controllability thus the ability to animate the display is not profound.
Overcoming the above-mentioned limitations, the goal of this research was to present a comprehensive ubiquitous display technology that is embedded in fabrics. We use thermochromic inks as our display medium to achieve a non-emissive display to preserve the ambient and ubiquitous characteristics of the fabrics. In addition, the Peltier semiconductor modules used here allow the rapid heating and cooling of the fabric which allows this technology to be embedded as a ubiquitous animated display technology.

Arrangement of the overall system of the textile display
5.3 System Description
The overall system is depicted in Fig. 5.2. The textile display system uses a combination of Peltier semiconductor modules and thermochromic leuco-dye ink technologies to achieve a fast color-changing display. These two technologies are combined together using a closed-loop control system employing a PID (proportional, integral, and derivative) controller in order to accurately control the Peltier temperature and thereby control the color. Next, we describe in detail the workings of each main component of the system.
5.3.1 Component Selection
5.3.1.1 Thermochromic Inks
The textile display system uses thermochromic leuco-dye inks as the display method due to its ease of implementation and high robustness. These inks work on the basic principle that when their temperature is raised beyond their ‘actuation temperature range,’ the inks become colorless. When the temperature is brought below the ‘actuation temperature range,’ the ink regains its original color. For example, the ink we regularly used in our experiments is of 24–32 \(^\circ \)C actuation temperature. It becomes completely colorless at 32 \(^\circ \)C and regains the original color approximately around 24 \(^\circ \)C. In between are gradual shades of the original color based on the temperature. However, the color of these inks and the actuation temperature ranges can be customized for any specific requirements.
For scope of this work, we have experimented with off-the-shelf inks which are of 15, 27, and 32 \(^\circ \)C actuation temperatures and of colors such as red, blue, green, black, and dark brown. These inks are then combined with textile binder and screen-printed, making the fabrics more robust for everyday use. Even though most of the prototypes feature single-color elements, we performed some multicolor experiments which are briefly discussed later in Sect. 5.5.1.
5.3.1.2 Semiconductor Peltier Elements
As thermochromic inks are thermally actuated, we chose the Peltier semiconductor modules due to its rapid thermal actuation capabilities within a wide range of temperatures. Peltier semiconductors use the thermoelectric effect; i.e., it creates a temperature difference across the module when a voltage is applied. Conversely, the temperature difference is reversed when the voltage is reversed. That is, when the voltage is reversed, the heating surface becomes the cooling surface. This is a very useful feature in our work as it eliminates the requirement for bulky cooling systems as the heating and cooling occurs on the same surface of the module. Therefore, we use Peltier elements as one of our main core technologies due to its ability to rapidly heat and cool the inks with minimal space constraints.
Peltier elements come in various sizes which usually feature different operational characteristics. For the workscope of this research, we have utilized Peltier elements of sizes, 60 \(\times \) 60 mm, 30 \(\times \) 30 mm, and 15 \(\times \) 15 mm based on the context of the application. In addition, we were able to experiment with miniature Peltier elements (1 \(\times \) 1.2 mm). Table 5.1 describes the maximum specified characteristics of each Peltier element.
5.3.1.3 Controller Circuit
The basic controller circuit for one color-changing pixel is shown in Fig. 5.3. An H-bridge circuit was employed to achieve the change of direction of voltage applied on the Peltier element (Fig. 5.3). The voltage direction can be changed in the forward or reverse direction by switching on the Q1 and Q4 while Q2 and Q3 are switched off or switching on Q2 and Q3 while Q1 and Q4 are switched off, respectively. The switching on is done by a 100 Hz pulse width-modulated (PWM) signal, whose pulse width is controlled by the PID controller, in order to control the current through the Peltier element. Q1, Q2, Q3, and Q4 are MOSFETs (metal–oxide–semiconductor field-effect transistor) which have been selected based on the maximum current that is required by the Peltier module. Based on the prototype application, MOSFETs of different specifications have been used to match the specifications of the prototype’s Peltier element.

Controller circuit schematic that consists of an H-bridge to drive the Peltier element and a temperature sensor to provide closed-loop feedback
To control the temperature of the Peltier element, a temperature sensor is placed on the surface of the element. This closed-loop feedback allows the controller to implement a fine-tuned PID controller. In Fig. 5.3, the labels H1, C1, and T1 are connected to the microcontroller. H1 and C1 are switched to control the Peltier element using PWM as mentioned above, and the T1 is the temperature feedback from the NTC (negative temperature coefficient) temperature sensor that is read by the microcontroller. The temperature sensor used in here is Murata NTSA0XV103FE1B0 NTC \(10\,\mathrm{k}\Omega \) thermistor.
5.3.1.4 Temperature Control Algorithm
PID Algorithm: With the completion of few duty cycles, the algorithm reads temperatures of all modules. Each time all the readings are done, the controller calculates the proportional (P), integral (I), and derivative (D) terms for each of the modules using the following algorithm.
where e—error, sp—set point, dt—sampling time (time interval between two samples), P\(_e\)—previous error, k\(_p\)—proportional constant, k\(_i\)—integral constant, and k\(_d\)—derivative constant.
By changing the value of the set point of a certain Peltier element, the pixel can change color to become colorless or regain the original color. For example, if the thermochromic ink with a 24–32 \(^\circ \)C is used, the set point can be changed to 33 \(^\circ \)C to make the pixel colorless or 23 \(^\circ \)C to make the pixel the original thermochromic ink color. To tune the PID controller, we used a heuristic method named the Ziegler–Nichols method [24]. With this method, the k\(_p\), k\(_i\), and k\(_d\) values are set as required.

Integration of the system
5.3.1.5 Integration
To construct a color-changing pixel, the system contains few different elements that need to be carefully put together. The main basic elements of the system are shown in Fig. 5.4a. To integrate the system together, we initially mounted the temperature sensor on the Peltier element using a copper-adhesive tape (Fig. 5.4b). The copper-adhesive tape allows efficient heat transfer between the Peltier element, temperature senor, and the fabric in that area. The Peltier elements are attached to the fabric by a thermally conductive adhesive which allows efficient heat transfer between the fabric and the element (Fig. 5.4b). We have tested this implementation setup on several different types of fabric ranging from silk to cotton which produce similar results. This is the most common technique that has been utilized for all the prototypes discussed in the Sect. 5.5.

Setup of the system for testing using a wall-hanging prototype
5.4 Technical Analysis
The temperature and color results of the system were observed with the use of one of the temperature sensors of the circuit and an external industrial color sensor. As the color-changing fabric, a prototype of a wall-hanging art that was printed with thermochromic ink was used. The system testing setup is shown in Fig. 5.5. The following are the main characteristics of the tested system
-
The thermochromic ink used here has an actuation temperature range of 24–32 \(^\circ \)C. In addition, most of the results focus only on single-color display.
-
The fabric used in this analysis is the common taffeta silk fabric and the ink was screen-printed on to the fabric. (The birds have been printed in brown-color thermochromic ink on the light blue fabric).
-
The Peltier modules used in this case are of 60 \(\times \) 60 mm, 30 \(\times \) 30 mm, 15 \(\times \) 15 mm, 1 \(\times \) 1.2 mm (miniature Peltier element) size. The results have been averaged, since all Peltier elements show similar results for the temperature and color controllability results. However, we have compared each Peltier module individually for the power characteristics analysis.
It should be noted that all the experiments carried out are focused on the current implementation of the system. That is, the temperature ranges of the system are essentially to match the actuation temperatures of the thermochromic ink that is commonly used in most of our prototypes, thus, approximately between 20 and 35 \(^\circ \)C.

Color transient response of the system
5.4.1 System Evaluation
5.4.1.1 Temperature Controllability
The transient response of the implemented PID controller is shown in Fig. 5.6a. As observed, the rise time of the system is approximately 2 s (to reach from ambient temperature of 24–32 \(^\circ \)C). In addition, the fall time of the system too approximates to 2 s which is an important characteristic. This ability of the system to rapidly cool-down the fabric allows the thermochromic ink to rapidly regain the original color, hence allow subtle bidirectional animations on fabric. Figure 5.6b indicates the color change during this process.

Static temperature response of the system that displays the accurate temperature controllability
The curve in Fig. 5.7 depicts the steady-state errors of the system. As observed here, the temperature controller is able to control the temperature within an accuracy of approximately 2% (±0.3 \(^\circ \)C) for the given temperature range. This is an acceptable indication of the controllability of the temperature and hence the controllability of the color.
5.4.1.2 Color Controllability
Just as Figs. 5.6a and 5.7 are evidence of the accurate temperature controllability of the system, we conducted experiments to check the actual color controllability of the system. For this purpose, we used a KEYENCE(R) CZ-H32 color sensor with its CZ-V21A amplifier. This sensor unit displays the degree of correspondence between the target color calibrated as a reference and the target color currently being detected. The value read as a result is the reflected light intensity effected by the target color. For our purpose, we calibrated the reference color to be the color of the thermochromic ink. For readability, the values are displayed in a normalized form where 0 is the color of the thermochromic ink and 1 is the color of the fabric.

Temperature transient of the system and the color change occurs as a response
Figure 5.6 depicts the color change resulted by the temperature change of the Peltier element. The normalized temperature values of Fig. 5.8 indicate 0 as the temperature at which the ink regains its full color, i.e., 24 \(^\circ \)C, and 1 as the actuation temperature, i.e., 33 \(^\circ \)C. As expected, the temperature curve leads the color curve which is an indication that the color change is triggered by the temperature. The temperature curve settles slightly higher than 1 since the target temperature has been set to slightly above 32 \(^\circ \)C at 33 \(^\circ \)C to ensure the color change. In addition, once the ink becomes completely colorless, it still leaves a small quantity of ‘colorless’ residue of the ink behind which could be observed upon close inspection. Hence, it could be observed from Fig. 5.8 that the color curve settles slightly below 1 (1 is the fabric color).

Actual color output against various temperature settings
Figure 5.9 indicates the actuated color of the fabric for the respective temperature settings. This is indicative of the color controllability. It should also be noted that this may change across various colors or across various manufacturers of the ink.

Steady-state power requirements for 1 cm\(^2\)
5.4.1.3 Power Characteristics of the System
Figure 5.10 details the different levels of power required for maintenance of the different temperatures for an area of 1 cm\(^2\). This is a clear indication that if the actuation temperature of the thermochromic ink is closer to the room temperature, the power required is less. In this case, the lowest point was recorded at 24 \(^\circ \)C for all Peltier elements. In addition, the miniature Peltier element has the lowest power consumption out of all the used Peltier elements.
5.4.2 Experimenting with Different Temperature Ranges
As we have seen here, the temperature controller can actuate the temperature relatively fast due to the introduction of active cooling as compared to the previous systems (which did not have active cooling mechanisms). As mentioned before, the temperature range was selected based on the off-the-shelf inks that were used for the experiment. However, to extend this experiment further, we analyze the speed and power characteristics for different temperature ranges. Having this knowledge would be helpful in customizing the thermochromic ink actuation temperature ranges to achieve specific speeds of color changes and limit power requirements.
To conduct this experiment, we selected a midpoint temperature and the two set points for colored and colorless states were set in multiples of 2 \(^\circ \)C equally above and below the midpoint (for example, if the midpoint was 25 \(^\circ \)C, then the first set of set points 23–27 \(^\circ \)C, next 21–29 \(^\circ \)C, followed by 18–31 \(^\circ \)C). Next, we observed the transient and settling times and the power characteristics for each of these systems for heating and cooling. Then, we repeated these results for midpoint temperatures of 20, 25, 30, and 35 \(^\circ \)C. Table 5.2 shows the used temperature details. The Peltier modules used in this case were 15 mm \(\times \) 15 mm only. This was since the main goal of this experiment was to identify the characteristic behavior for different selected temperature ranges. Therefore, through our experience from the previous results, we can extrapolate these results to the other Peltier modules.

Transient and settling times for different temperature ranges
5.4.2.1 Speed of Color Change
Figure 5.11 shows the speeds of transient and settling times. As observed, the transient times are faster for smaller temperature ranges. This is also true for the settling times which are slightly higher than the transient times but settle faster for smaller temperature ranges. In addition, one of the key characteristics that can be observed through this study is that the transient and settling times are similar to same temperature ranges irrespective of the midpoint temperature. This is an indication of the PID controller in effect. The controller attempts to reach the set temperature soonest possible based on the tuned parameters. As such, similar temperature differences denote similar transient and settling times.

Power requirements for continuously transient states between two temperatures
5.4.2.2 Power Characteristics
Figure 5.12 shows the power characteristics for power requirements for continuously transient states between the two set points for different temperature ranges. As it can be observed, the required power is higher when the temperature difference between the set points is higher. However, the steady-state power for each of the temperatures can be inferred from Fig. 5.10.

Summary of implemented prototypes
5.5 Prototypes and Applications
This section presents some of the initial work and applications that can use our textile display system. We built a range of prototypes as summarized in Fig. 5.13. The initial prototypes looked to explore characteristics such programmability, animateability, and ubiquity of the textile display system in various contexts. With the miniature Peltier elements, we explored the flexibility and wearability introduced by a microscale integration. The diverse applications were an attempt to identify the system’s usability in a range of ubiquitous applications.
5.5.1 Initial Prototypes
Several prototypes were designed and implemented to explore the capabilities of the textile display system. For these prototypes, a range of Peltier elements from 60 mm \(\times \) 60 mm down to 15 mm \(\times \) 15 mm have been used. The selection of Peltier elements for these prototypes was based on the context and the application of use: In certain applications, larger Peltier elements up to the size of 60 mm \(\times \) 60 mm were used to actuate whole images as pixels, while smaller elements were used to formulate single pixels for pixelated displays and improve the flexibility of the textile. The following are some of such application prototypes.
5.5.1.1 Furniture Garments Using Textile Display
As a decorative piece, we initially created a wall-hanging painting that would animate a bird on the painting once a person steps closer to it. The bird in the middle is printed with thermochromic ink and two 60 mm \(\times \) 60 mm modules are attached behind it. Using an infrared proximity sensor, a person’s presence is detected and the animation is triggered to change the set point as indicated in Fig. 5.14b. This would make the bird in the middle to appear and disappear in a subtle manner.

Wall painting that animates the bird in the middle when a person moves closer

Table runner that animates a bird flying across on the cloth
Next, we implemented an animated table cloth that which has a subtle animation of a bird flying across the table when activated (Fig. 5.15). This work used 60 mm\(\times \)60 mm Peltier elements embedded behind each bird as seen in Fig. 5.15a(iii). The Fig. 5.15a(ii) indicates the table cloth when de-activated with all the birds appearing and Fig. 5.15a(i) shows the animation in progress. The Fig. 5.15b shows the programming the set point to display the animation. As observed, the subtle animation is achieved by carefully starting each Peltier is set to turn on as the Peltier before it is turning off. Both prototypes used thermochromic inks of 24–32 \(^\circ \)C actuation temperature range.

Animating a clock using a low-resolution display with a 5 \(\times \) 5 pixel arrangement
5.5.1.2 Pixelated Displays
Figure 5.16 shows a multicolored pixelated display. This 5 \(\times \) 5 pixel display currently shows an animated clock using 30 mm \(\times \) 30 mm Peltier elements and a multicolor display which uses a combination of green (37 \(^\circ \)C) and red (15 \(^\circ \)C) inks on a white fabric base. This 5\(\,\times \,\)5 pixelated display currently shows an animated clock using 30 mm \(\times \) 30 mm Peltier elements and a multicolor display which uses a combination of green (37 \(^\circ \)C) and red (15 \(^\circ \)C) inks on a white fabric base.

Wearable applications of the textile display
5.5.1.3 Wearable Displays
Figure 5.17a, b depicts the time-lapsed images of some early versions of wearable applications as a single-pixel display and a pixelated display, respectively. In the single-pixel display, the heart image is animated to turn on and off randomly. The pixelated display depicts various animations such as the hearts moving in circles from the center to the boundary of the display. Figure 5.17c indicates few different scenarios we envisioned such as identifying the context and displaying appropriate messages such as ‘Hi’ or smiley faces.
5.5.2 Prototypes with Miniature Peltier Elements
The miniature Peltier elements (MPEs) gave us the opportunity to identify the challenges and advantages of integrating microscale Peltier elements. The scale of these elements and the lower power requirement enabled us to explore improving the flexibility and wearability (mobility) as demonstrated next.

Context-specific attaching of MPEs to the fabric
5.5.2.1 Flexible Displays
As an initial prototype (Fig. 5.18a), a pixelated display was implemented on the fabric. For this purpose, each pixel was placed 5 mm apart from each other. Figure 5.18b depicts another prototype with the Peltier modules arranged in a wavy pattern.

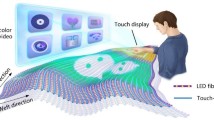
Prototypes of textile displays with the MPEs
Figure 5.19a, b indicates some of the prototypes that utilize the MPEs. As observed, the use of MPEs have significantly improved the flexibility of the display.

Wearable dress with miniature Peltier element textile display
5.5.2.2 Wearable Display
Figure 5.20 depicts a dress fitted with the miniature Peltier elements that display ‘necklace’ patterns on the dress. In addition, the dress was completely battery operated with two AAA-type batteries allowing it to be operated continuously for approximately 4 h.
5.5.3 Applications
The above prototypes helped us observe and explore the capabilities of this technology. Upon these observations, next, we briefly introduce three diverse areas where the technology was applied. The diversity of these areas demonstrates the ubiquity of the technology.
5.5.3.1 Merging Textile Display Technology with Byobu
Byobu is a traditional textile craft that features textile room divider screens from Japan. Our technology leverages on current trends in ubiquitous and pervasive computing. In the case of technology, change occurs in the very fabric itself, and in terms of the color of the ink. Thus it enables smooth color changes on the fabric depicting subtle animations on the fabric surface. In this application, we were able to merge a traditional byobu screen with our technology [25], where the screen becomes active as a person moves closer to it and subtly animates flowers on the central portion of the screen (Fig. 5.21).

Byobu installation where the brown circle in the middle is animated to display birds and butterflies interactively

Detecting the dynamic dMarker QR tag with the QR application
5.5.3.2 dMarkers: Ubiquitous Dynamic Markers for Augmented Reality
This work helped us extend our technology in to paper material that created dynamic markers for Augmented Reality applications [26]. ‘dMarkers’ is a concept of ‘dynamic markers’ or markers that can change for marker technologies for Augmented Reality (AR) technologies. Here, by dynamic we mean markers that can change or morph into different markers which could open up various new possibilities through technologies such as AR. We use our technology to achieve subtly changing animated dMarkers for paper and fabric materials. The key feature of this technology lies within its ability to animate the material itself without embedding any separate displays. Thus, this technology is used to subtly animate various patterns for markers to be used as dynamic markers. As a proof of concept, we implement the dMarkers for Quick Response (QR) codes (Fig. 5.22). In our implementation, we were able to generate various QR codes for paper and fabric-based materials that were detected through third-party QR code apps. Fabric was used in this case to explore the future possibility of implementing the dMarkers with clothes.

Paper-based temperature sensor. a Thermochromic ink pixels disappearing as the temperature increases. b Detecting different markers at different temperatures
5.5.3.3 A dynamic AR marker for a paper-based temperature sensor
Based on some of the potentials identified from the previous application, this work explores the altering of the textile display technology into developing a paper-based temperature sensor that can be read digitally [27]. To achieve this, we printed patterns on an AR marker using thermochromic inks of various actuation temperatures (Fig. 5.23). Thus, as the temperature gradually changes, the marker morphs into new marker for each temperature range. As such, the simple piece of paper with the thermochromic AR pattern and the smartphone becomes the paper-based temperature sensor.
5.6 Discussion
5.6.1 Discussion on the System
One of the main goals of this research was to identify key technologies that would enable a fully controllable, programmable non-emissive textile display. As such, we used thermochromic inks and with Peltier semiconductor elements combined with a tuned PID controller to achieve this goal. The Peltier elements’ ability to rapidly heat and cool the thermochromic ink-printed textile gives our system the advantage in producing subtle, yet controllable and programmable animations on the textile.
We have presented the use of few different types of Peltier elements with the systems. These Peltier elements were selected based on the application context where the Peltier elements were chosen based on parameters such as the pixel size and power requirements. With our detailed technical analysis of the system, we presented critical results to analyze the performance of the system. In addition, with the introduction of the new custom-made miniature Peltier elements, the results indicated significant improvements over the previous parameters. Thus, here, we summarize some of our results.

Summary of timing characteristics for temperature ranges
5.6.1.1 Speed of Color Change
Through the observed systems, the color change was relatively fast due to the introduction of active cooling as compared to previous systems (which did not have active cooling mechanisms). In addition, the results indicated that there was no significant difference in the speed of temperature change for different Peltier elements. However, the temperature ranges’ experiments described in Sect. 5.4.2 show how the animation speed can be improved by customizing the actuation range of the thermochromic ink. These results are averaged and summarized in Fig. 5.24. Through observation we can see that for the tested results, the color change can be triggered within approximately 0.8 s which can increase the frame rate of the animations on the textile up to about 1.5 FPS. Since the transient time refers to appearance of a single pixel of a single frame of the animation, the frames-per-second animation can be determined by the inverse of the transient time. As such, the derived frames-per-second graph is depicted in Fig. 5.25.

Frame rate of the textile display for different temperature ranges
5.6.1.2 Power Requirement
As the display system uses thermal actuation as the main enabling technology, power consumption is often a critical design factor. To address this, we have done a number of power consumption analysis to identify optimal parameters for the system’s use. These results are summarized in Fig. 5.10. Figure 5.12 shows the temperature range test for the Peltier elements. For ease of reference, the results are calculated for the actuation of a 1 cm\(^2\) area on the textile. These figures show a few interesting characteristics of the power consumption of the system.
-
When the Peltier elements differ in size, their characteristics change with larger Peltier elements using the highest amount of power (Fig. 5.10).
-
The power consumption is minimal around the room temperature (Fig. 5.10).
-
The power consumption is minimal when the temperature range between the color and the colorless temperatures is minimal (Fig. 5.12).
-
We observed that the power consumption would be higher for continuous animations on the textile. This is because, at steady state, power is required only to maintain the required temperature. Conversely, in transient states or when the animation is occurring, power is continuously used at a higher rate to achieve the required temperature soonest possible.
-
Results indicate that the miniature Peltier elements possess the best power consumption characteristics for a non-emissive textile display. But in the case of stationary and flat displays with larger pixels, the use of larger Peltier elements could be suitable to ease the process of integration. For mobile displays, the use of miniature Peltier elements would be the best choice (Figs. 5.10 and 5.12).
5.6.2 Prototypes and Applications
We presented some of the initial prototypes and three diverse applications that were implemented using the textile display system. The main motivation behind these works was to identify the applicability of the textile display system in the real world. As observed, we present some key points identified with the system.
Material: The system was implemented in two main types of materials, textiles, and paper (dMarkers and paper-based sensor). These materials are two of the widely used materials in everyday scenarios. These materials can be easily used in such applications due to thermochromic inks’ ability to be screen-printed onto textiles or papers. As such, any material that can withstand thermochromic inks and have enough thermal conductivity can be converted to a non-emissive display.
Ubiquity: Similarly, the usability of widely used materials such as paper or textiles makes the system suitable for a wide range of daily objects such as furniture, wall papers, and calendars. One of the main characteristics of the system, non-emissivity, would enable merging of the technology and material seamlessly.
Wide area of application: Combining the summary of above results, it is evident that the system can be used in many different areas of applications. For example, we illustrated the merging of this technology from merging with traditional crafts to enhancing Augmented Reality applications to fabricating a new type of temperature sensor.
5.7 Design Methodology
This section lays out a methodology for designing non-light-emissive textile displays as a final conclusion to the work described in this chapter. The methodology was developed based on the design processes and the above discussion points we experienced from the development of the prototypes.

Design Methodology for a non-emissive textile display
Figure 5.26 summarizes the design methodology of non-light-emissive textile display systems. We identified four key steps for the process of designing a non-emissive textile display system. They are as follows:
-
Thermochromic ink selection
-
Peltier selection
-
Circuit and firmware design/implementation
-
Integration
Next, we discuss the process of each of these steps.
5.7.1 Thermochromic Inks
Thermochromic ink selection is the first step of this design process. This step consists of two substeps: identifying the animation speed (which is useful for the next steps), ink selection, and the printing.
-
Animation speed
Animation speed is critical in identifying the thermochromic inks for the system. Based on the animation speed in frames-per-second rate, we can determine the customization of the actuation temperature ranges for the thermochromic inks. By referring to Fig. 5.25, we can estimate the actuation range of the thermochromic inks. Through our observed results, if the animation speed is to be 1 FPS, the suitable temperature difference should be approximately 6 \(^\circ \)C for the thermochromic ink.
-
Thermochromic ink selection
Once the thermochromic ink actuation range is selected, the color can be customized to the requirement of the system. It should be noted that once the thermochromic ink is heated, the base fabric would appear. Thus, the color selection should be according to the requirement and such that there is enough color difference between the ink and the base fabric for the animation to be visible. In certain cases, the color change might be to a different color (instead of colorless). In such cases, the user can customize these colors according to the base fabric.
-
Printing
The most common method used for printing thermochromic inks is screen printing. Generally, most such thermochromic inks require mixing the ink with a textile binder solvent which is usually provided by the supplier. Please refer to the supplier for the mixing details. According to the requirement, either the full fabric or individual pixel patterns (as seen in Sect. 5.5.1.1) can be printed with thermochromic inks.
5.7.2 Peltier Selection
-
Display type
The type of display could be flat and stationary, mobile or flexible. Ideally, even though miniature Peltier elements would be the best choice for any display, in some cases due to ease of integration, larger Peltier elements are suggested. However, this selection can be extrapolated into any type of Peltier element available in the market since, here, we only use the Peltier elements that were used in this research as a guide.
-
Pixel size
If the user decide to use a Peltier other than a miniature Peltier element, the pixel size could be the main factor to determine the selection of the Peltier element. Other than for mobile displays, larger Peltier elements, according to their size, are suitable for flat and stationary displays. As we have demonstrated in our prototypes, the use of Peltier size can be dependent on the kind of image the user wishes to animate.
5.7.3 Circuit and Firmware
This step is mainly dependant on the selected temperature range of the thermochromic inks and the selected Peltier elements.
-
Circuit design
The basic circuit design for a single Peltier element is as described in Sect. 5.3.1.3. For multiple Peltier elements, this circuit can be repeated. The main factors in this step is the determination of the parameters of the MOSFET modules. Based on the parameters of the selected Peltier module, the maximum current required per module can be identified. Using these data, the MOSFET modules can be selected such that the maximum current of the Peltier module is less than the maximum drain current rating of the MOSFET module.
-
Firmware design
Upon the design of the circuit, the firmware for the PID controller can be programmed as explained in Sect. 5.3.1.4.
5.7.4 Integration
The basic integration layout is as described in Sect. 5.3.1.5. The key element here is making sure of efficient heat transfer through all the layers from the Peltier element to the fabric. In addition, careful attention must be paid to placing the temperature sensor on the Peltier element. The sensor must be placed directly on the surface of the Peltier element be covered by copper-adhesive tape.
5.8 Conclusion
The development of non-light-emissive textile displays introduces a plethora of design and technical parameters such as colors, activation temperature ranges, and power requirements as seen through this work. However, above all, the technology has an immense potential as a ubiquitous display as it can blend with many other technologies as well as crafts. The presented design methodology briefly summarizes and discusses the guidelines for implementing non-light-emissive textile displays. This methodology carefully details all the factors that should be taken into consideration during the process as experienced by the authors. As such, we envision this technology can be utilized by any practitioners in the future to implement novel ubiquitous textile displays.
Summary
This chapter discusses a non-emissive textile display system. The current implementation of the system consists of thermochromic inks, Peltier semiconductor elements, and a fine-tuned PI controller system. We present a detailed technical analysis of this system and its results. With this integration of technology, the controller is able to control the color of the fabric accurately and with a fast heating or cooling rate. Many ubiquitous fabric display prototypes and applications of the system are presented. These demonstrate the ubiquity of our system and its seamless integratability to our environment. As such our main contributions are as follows:
-
Detailed implementation components of the system.
-
A comprehensive technical analysis of the system.
-
Wide range of prototypes and diverse applications that demonstrates the system’s usability in real life.
-
A step-by-step design methodology for implementing a non-emissive textile display system.
Due to the calm and subtle nature of this animated fabric display, we envision that this non-emissive textile display system will be able to breathe life into the textiles of the future.
References
Buechley, L., Eisenberg, M.: Fabric pcbs, electronic sequins, and socket buttons: techniques for e-textile craft. Pers. Ubiquitous Comput. 13(2), 133–150 (2009)
Suzuki, T., Doi, M.: Lifeminder: an evidence-based wearable healthcare assistant. In: CHI ’01 Extended Abstracts on Human Factors in Computing Systems, pp. 127–128. ACM, New York, NY, USA (2001)
Buechley, L., Eisenberg, M., Elumeze, N.: Towards a curriculum for electronic textiles in the high school classroom. In: Proceedings of the 12th Annual SIGCSE Conference on Innovation and Technology in Computer Science Education, ITiCSE ’07, pp. 28–32. ACM, New York, NY, USA (2007)
Jacobs, M., Worbin, L.: Reach: dynamic textile patterns for communication and social expression. In: CHI ’05 Extended Abstracts on Human Factors in Computing Systems, pp. 1493–1496. ACM, New York, NY, USA (2005)
Adwalker: Adwalker. http://www.adwalker.com
PHILIPS: Lumalive. http://www.lumalive.com
Cheng, S.H., Kim, K., Vertegaal, R.: Tagurit: a proximity-based game of tag using lumalive e-textile displays. In: Proceedings of the 2011 Annual Conference Extended Abstracts on Human Factors in Computing Systems, CHI EA ’11, pp. 1147–1152. ACM, New York, NY, USA (2011)
Wakita, A., Shibutani, M.: Mosaic textile: wearable ambient display with non-emissive color-changing modules. In: Proceedings of the 2006 ACM SIGCHI International Conference on Advances in Computer Entertainment Technology, ACE ’06, p. 48. ACM, New York, NY, USA (2006)
Wren, C.R., Reynolds, C.J.: Minimalism in ubiquitous interface design. Pers. Ubiquitous Comput. 8(5), 370–373 (2004)
Orth, M., Post, R., Cooper, E.: Fabric computing interfaces. In: Proceedings of the Conference Summary on Human Factors in Computing Systems, CHI ’98, pp. 331–332. ACM, New York, NY, USA (1998)
Perner-Wilson, H., Buechley, L.: Making textile sensors from scratch. In: Proceedings of the Fourth International Conference on Tangible, Embedded, and Embodied Interaction, TEI ’10, pp. 349–352. ACM, New York, NY, USA (2010)
Suzanne Lee, W.D.P.: Fashioning the Future: Tomorrow’s Wardrobe. Thames and Hudson LTD, London (2005)
Maynard, J.: The tron guy. http://www.tronguy.net
SARL, L.: Lumigram. http://www.lumigram.com
Berzowska, J., Skorobogatiy, M.: Karma chameleon: bragg fiber jacquard-woven photonic textiles. In: Proceedings of the Fourth International Conference on Tangible, Embedded, and Embodied Interaction, TEI ’10, pp. 297–298. ACM, New York, NY, USA (2010)
Gaver, W., Bowers, J., Boucher, A., Law, A., Pennington, S., Villar, N.: The history tablecloth: illuminating domestic activity. In: Proceedings of the 6th Conference on Designing Interactive Systems, DIS ’06, pp. 199–208. ACM, New York, NY, USA (2006)
: E-ink. www.eink.com
Melin, L.: The information curtain: creating digital patterns with dynamic textiles. In: CHI ’01 Extended Abstracts on Human Factors in Computing Systems, pp. 457–458. ACM, New York, NY, USA (2001)
Berzowska, J.: Very slowly animating textiles: shimmering flower. In: Proceedings of the ACM SIGGRAPH 2004 Sketches, SIGGRAPH ’04, p. 34. ACM, New York, NY, USA (2004)
Orth, M.: Bullseye. http://www.maggieorth.com
Berzowska, J., Coelho, M.: Smoks: the memory suits. In: CHI ’06 Extended Abstracts on Human Factors in Computing Systems, pp. 538–543. ACM, New York, NY, USA (2006)
Yamada, H., Tanikawa, T., Nishimura, K., Rose, M.H.: Paint color control system with infrared photothermal conversion. In: Proceedings of the 8th International Conference on Advances in Computer Entertainment Technology, ACE ’11, pp. 64:1–64:8. ACM, New York, NY, USA (2011)
Berzowska, J.: Memory rich clothing: second skins that communicate physical memory. In: Proceedings of the 5th Conference on Creativity and Cognition, C and C ’05, pp. 32–40. ACM, New York, NY, USA (2005)
Valério, D., da Costa, J.S.: Tuning of fractional pid controllers with ziegler-nichols-type rules. Signal Process. 86(10), 2771–2784 (2006)
Peiris, R.L., Koh, J.T.K.V., Tharakan, M.J., Fernando, O.N.N., Cheok, A.D.: Ambikraf byobu: merging technology with traditional craft. Interact. Comput. 25(2), 173–182 (2013)
Peiris, R.L., Fernando, O.N.N., Bee, C.S., Cheok, A.D., Ganesan, A.G., Kumarasinghe, P.: dmarkers: Ubiquitous dynamic makers for augmented reality. In: Proceedings of the 10th International Conference on Virtual Reality Continuum and Its Applications in Industry, VRCAI ’11, pp. 217–224. ACM, New York, NY, USA (2011)
Peiris, R.L., Fernando, O.N.N., Cheok, A.D.: A dynamic ar marker for a paper based temperature sensor. In: Proceedings of the Second International Conference on Ambient Intelligence, AmI’11, pp. 195–199. Springer, Berlin, Heidelberg (2011)
Acknowledgements
The author wishes to acknowledge Mili John Tharakan, Owen Noel Newton Fernando, Kouta Minamizawa, Ardian David Cheok, and Ryohei Nakatsu for their contributions during the lifespan of this work. The work was partially supported by CUTE Project No. WBS R-7050000-100-279 partially funded by a grant from the National Research Foundation (NRF) administered by the Media Development Authority (MDA) of Singapore and the JST-ACCEL ‘Embodied Media’ project.
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2017 Springer International Publishing AG
About this chapter
Cite this chapter
Peiris, R.L. (2017). Integrated Non-light-Emissive Animatable Textile Displays. In: Schneegass, S., Amft, O. (eds) Smart Textiles. Human–Computer Interaction Series. Springer, Cham. https://doi.org/10.1007/978-3-319-50124-6_5
Download citation
DOI: https://doi.org/10.1007/978-3-319-50124-6_5
Published:
Publisher Name: Springer, Cham
Print ISBN: 978-3-319-50123-9
Online ISBN: 978-3-319-50124-6
eBook Packages: Computer ScienceComputer Science (R0)