
Abstract
Volatility clustering and leptocurtic, heavy tailed distribution of financial asset returns have been puzzling economists for decades. Ghoulmie, Cont, and Nadal (2005) proposed an agent-based model attempting to reproduce these stylized facts by means of the threshold switching behavior of investors. We investigate properties of the model following principles of the design of simulation experiments. We find the results to be only partially consistent with properties of empirical time series. This suggests the model to be an insightful but incomplete description of the phenomena under study.
Access provided by CONRICYT-eBooks. Download conference paper PDF
Similar content being viewed by others


Keywords
1 Introduction
Volatility clustering and leptocurtic heavy tailed distribution of returns are the well-known facts manifesting in time series of financial instruments [11]. Despite much attention and research the long standing debate on origins of the phenomena is still open. Among the plausible causative mechanisms the following are suggested in the literature:
-
1.
heterogeneity in time horizons of economic agents and rates of information arrival [1, 7];
-
2.
instability of trading strategies due to agent learning or behavioral switching [3, 6, 9];
-
3.
investor inertia resulting from a threshold behavior of agents trading only when magnitude of a market signal reaches a certain level [4].
In an attempt to quantify influence of the last mechanism on properties of a time series Ghoulmie et al. [4] proposed an agent-based model allowing to study its effect in isolation. The simulation results reported there confirmed capability of the model to generate time series with the desired properties, namely leptocurtic distribution of returns with semi-heavy tails and positive autocorrelation of absolute returns over many time lags (symptomatic for volatility clustering). This general conclusion, however, has been based on only two arbitrarily selected examples.
In this article we present results of the more systematic investigation of properties of the model proposed by Ghoulmie et al. [4]. We verify the following two hypotheses:
-
H1
the excess kurtosis of distribution of asset returns generated from the model is positive (κ > 0);
-
H2
the one period autocorrelation of absolute returns generated from the model is positive (ρ τ = 1 > 0).
Following the approach of [4] we use hypothesis H1 as a proxy for detecting heavy tails. This is justified by the fact that in case of symmetric, unimodal distributions positive kurtosis indicates heavy tails [2], while at the same time empirical distributions of returns are known to be symmetric with high kurtosis, fat tails, and a peaked center as compared with the normal distribution [11, p. 93]. In a similar way we use hypothesis H2 as a proxy for detecting volatility clustering. For empirical time series autocorrelations of both absolute and squared daily returns are known to be positive for many time lags and to be always positive at a lag of 1 day [11, pp. 90–91]—a direct consequence of volatility clustering [11, p. 313].
The rest of the paper is divided into three sections. In Sect. 2 we describe the model structure. In Sect. 3 we present the experiment design and results of the analysis. Section 4 concludes.
2 Model Description
The description of the model presented in this section is a direct adaptation of the original model by [4]. We consider a market with a single asset traded by n ∈ N agents. Trading takes place in discrete time intervals t ∈ { 1, 2, …}. At each time period agents decide to buy or sell a unit of the asset or remain idle. By denoting demand of agent i at time t by ϕ i (t) this will be represented as ϕ i (t) = 1, ϕ i (t) = −1 and ϕ i (t) = 0, respectively. The buy or sell decisions are triggered by the market signal representing public expectations about a future return rate and modeled as a sequence of IID random variables ɛ t ∼ N(0, σ 2). Agents place orders when the signal strength crosses their individual “sensitivity” threshold θ i (t), a sell order when ɛ t < −θ i (t) or a buy order when ɛ t > θ i (t). They remain dormant when \(\varepsilon _{t} \leq \vert \theta _{i}(t)\vert\). The resulting excess demand is given by Z t = ∑ 1 = 1 n ϕ i (t) and produces a change in the asset price given by r t = Z t ∕(λ n), where λ quantifies “market depth” and r t can be interpreted as log rate of returns. After orders are placed and market price determined every agent independently with probability q changes its sensitivity threshold θ i to \(\vert r_{t}\vert\).
In addition to the analysis of the model we use the following observation showing the link between σ and λ in the model (this fact was not observed in [4]). Assume that we have some state of the model θ i (t) for parameters σ and λ. Now consider that we scale all these parameters by α > 0. Thus the state of our model is α θ i (t) for parameters σ α and λ∕α. If we use the same random number to generate ɛ t , then ϕ i (t) will be identical in both cases. Therefore r t will be α times larger in the new parameterization case. But this means that θ i (t + 1) will be also α times larger so in period t + 1 the parameters of the model maintain the same transformation relation as in period t. This shows that the dynamics of the model is exactly the same for all parameterizations where the product σ λ is constant.
3 Simulation Experiment Results
We simulate our model assuming that we have n = 100, 000 agents. The simulation is run for 110, 000 periods of which the first 10, 000 are discarded as burn-in phase. These values are much larger than assumed in [4] to ensure that we obtain information about the behavior of the model in a steady state. We keep the original ranges of values for the design parameters q, σ, and λ as chosen by [4] so that r t can be interpreted as a daily return rate: q ∈ [0. 01, 0. 1], σ ∈ [0. 001, 0. 01], and λ ∈ [5, 20]. We probe the design space in 4710 random points with uniform probability of choosing a combination (q, σ ⋅ λ) from the set [0. 01, 0. 1] × [0. 005, 0. 2] and run the simulation 32 times in each point.
The left plot in Fig. 1 depicts dependence of kurtosis of the distribution of returns on the design parameters. It is easily seen that the model generates leptocurtic distribution of returns only in the narrow area of the design space, while in the remaining area the distribution of returns is mezocurtic or even platocurtic. The right plot in Fig. 1 depicts dependence of one period autocorrelation of absolute returns on the design parameters. In case of empirical time series this measure is observed to be always positive [11, pp. 90–91]. One can easily see that for the simulated time series there are significant regions of the design space where autocorrelation is either not present or negative.

Estimated response surfaces of kurtosis of distribution of returns and one period autocorrelation of absolute returns
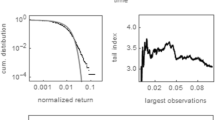
Autocorrelation of absolute returns for lags beyond one period is depicted in Fig. 2. It shows the median value (in red) and vigintiles for autocorrelation across the entire parameter range. It can be seen that around 70 % of simulations produced ρ τ = 1 < 0, moreover for 95 % of simulations ρ τ = 1 < 0. 193, and 90 % of simulations have ρ τ = 1 < 0. 115. For the lag 40 those figures drop to 95 % of simulations having ρ τ = 40 < 0. 013 and 90 % of simulations having ρ τ = 40 < 0. 006. Hence for most simulations the autocorrelation is negative or very close to zero.

Vigintiles for distribution of autocorrelation of absolute returns ρ for lags beyond one period; median value marked in red
We confirm these findings by formally testing hypothesis H1 and H2 with the Bayesian interval metamodel methodology proposed by [5]. Table 1 shows the calculated probability that the respective hypotheses are true in the investigated range of parameters. The probability values should be interpreted in the following way: given the simulation data we have collected if we would uniformly choose a new random parameter combination (q, σ ⋅ λ) from the set [0. 01, 0. 1] × [0. 005, 0. 2], then the values given in Table 1 are chances that in this new design point we would observe the given combination of autocorrelation and kurtosis.
4 Conclusions
By applying the systematic approach to the simulation experiment we have shown the model of Ghoulmie et al. [4] to generate entire spectrum of return trajectories with discrepant properties conditional on the initial parametrization. The properties of leptocurtic distribution of returns and positive one period autocorrelation of absolute returns are not guaranteed to emerge from the model, in fact the probability of both properties to manifest jointly is slightly more than one quarter. We therefore conclude the model to be an insightful but incomplete description of the phenomena under study.
Our findings exemplify importance of applying the principles of experiment design and analysis for credible inference on properties of agent-based models, as postulated by many authors [8, 10].
References
Andersen, T.G., Bollerslev, T.: Heterogeneous information arrivals and return volatility dynamics: uncovering the long-run in high frequency returns. J. Finance 52 (3), 975–1005 (1997)
DeCarlo, L.T.: On the meaning and use of kurtosis. Psychol. Methods 2 (3), 292–307 (1997)
Gaunersdorfer, A., Hommes, C.H., Wagener, F.O.: Bifurcation routes to volatility clustering under evolutionary learning. J. Econ. Behav. Organ. 67 (1), 27–47 (2008)
Ghoulmie, F., Cont, R., Nadal, J.P.: Heterogeneity and feedback in an agent-based market model. J. Phys.: Condens. Matter 17, S1259–S1268 (2005)
Kamiński, B.: Interval metamodels for the analysis of simulation input–output relations. Simul. Modell. Pract. Theory 54, 86–100 (2015)
Kirman, A., Teyssiere, G.: Microeconomic models for long memory in the volatility of financial time series. Stud. Nonlinear Dyn. Econom. 5 (4), 281–302 (2002)
LeBaron, B.: Evolution and time horizons in an agent-based stock market. Macroecon. Dyn. 5 (02), 225–254 (2001)
Lorscheid, I., Heine, B.O., Meyer, M.: Opening the black box of simulations: increased transparency and effective communication through the systematic design of experiments. Comput. Math. Organ. Theory 18 (1), 22–62 (2012)
Lux, T., Marchesi, M.: Volatility clustering in financial markets: a microsimulation of interacting agents. Int. J. Theor. Appl. Finance 3 (04), 675–702 (2000)
Marks, R.E.: Validating simulation models: a general framework and four applied examples. Computat. Econ. 30 (3), 265–290 (2007)
Taylor, S.J.: Asset Price Dynamics, Volatility, and Prediction. Princeton University Press, Princeton (2005)
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2017 Springer International Publishing AG
About this paper
Cite this paper
Olczak, T., Kamiński, B., Szufel, P. (2017). Statistical Verification of the Multiagent Model of Volatility Clustering on Financial Markets. In: Jager, W., Verbrugge, R., Flache, A., de Roo, G., Hoogduin, L., Hemelrijk, C. (eds) Advances in Social Simulation 2015. Advances in Intelligent Systems and Computing, vol 528. Springer, Cham. https://doi.org/10.1007/978-3-319-47253-9_29
Download citation
DOI: https://doi.org/10.1007/978-3-319-47253-9_29
Published:
Publisher Name: Springer, Cham
Print ISBN: 978-3-319-47252-2
Online ISBN: 978-3-319-47253-9
eBook Packages: EngineeringEngineering (R0)