
Abstract
This paper investigate the relative controllability of nonlinear fractional delay dynamical system with time varying delay in control. The necessary and sufficient conditions for the relative controllability criteria for linear fractional delay system are obtained. The sufficient conditions for the relative controllability of nonlinear fractional delay system are obtained by using Schauder fixed point arguments. Illustrative examples are given to examine the results obtained.
Access provided by CONRICYT-eBooks. Download conference paper PDF
Similar content being viewed by others


Keywords
1 Introduction
It is evident that many realistic model must include some of the past history of the system. A formulation by a system of ordinary differential equations is not possible to describe physical processes and they can be described by a system of delay differential equations. A related study on analytic solutions of linear delay differential equations has been studied by Bellman and Cooke [1], Smith [2], Halaney [3] Smith and Hale [4]. They have applied the method of steps to find series solution of delay differential equations. Using of Banach and Schauder fixed point theorem we can find in [5, 6].
Fractional differentials and integrals provide more accurate models of systems under consideration. Many authors have demonstrated the dynamics of interfaces between nanoparticles and substrates [7], bioengineering [8], continuum and statistical mechanics [9], filter design, circuit theory and robotics [10]. Differential equations with fractional order have recently proved to be valuable tools to the modeling of many physical phenomena. Moreover, Machoda et al. [11, 12] analysed and designed the fractional order digital control systems and also modeled the fractional dynamics in DNA. Apart from stability, another important qualitative behavior of a dynamical system is controllability. Controllability is used to influence an object behavior so as to accomplish a desire goal. Dauer and Gahl [13] obtained the controllability of nonlinear delay systems. Balachandran and Dauer [14] studied the controllability problems for both linear and nonlinear delay systems. The relative controllability of nonlinear fractional dynamical system with multiple delays and distributive delays in control have been discussed by Balachandran et al. [15–17]. Klamka [18, 19] established the controllability of both linear and nonlinear system with time variable delay in control. Manzanilla et al. [20] obtained the controllability of differential equation with delay and advanced arguments. Recently, Mur et al. [21] studied the relative controllability of linear systems of fractional order with delay. Detail study on controllability of fractional delay dynamical systems is given in [22, 23].
2 Preliminaries
This section begins with definitions and properties of fractional operator, special functions and its Laplace transformation. Finally the solution representation of fractional delay differential is given by using Laplace transform [24, 25].
-
(a)
The Caputo fractional derivative of order \(\alpha >0\), \(n-1<\alpha <n\), is defined as
$$\begin{aligned} ^CD^{\alpha }f(t)=\frac{1}{\varGamma (n-\alpha )}\int _{0}^{t}(t-s)^{n-\alpha -1}f^{(n)}(s)\mathrm {d}s, \end{aligned}$$where the function f(t) has absolutely continuous derivative upto order \(n-1\). The Laplace transform of Caputo derivative is given in [24].
-
(b)
The Mittag-Leffler functions of various type are defined as
$$\begin{aligned} E_{\alpha }(z)=E_{\alpha ,1}(z)=\sum _{k=o}^{\infty }\frac{z^{k}}{\varGamma ({\alpha k+1})}, z\in \mathbb {C}, Re(\alpha )>0, \end{aligned}$$(1)$$\begin{aligned} E_{{\alpha },{\beta }}(z)=\sum _{k=0}^{\infty }\frac{z^k}{ \varGamma (\alpha k+\beta )}, z,\beta \in \mathbb {C}, Re(\alpha )>0, \end{aligned}$$(2)$$\begin{aligned} E_{\alpha , \beta }^{\gamma }(-\lambda t^{\alpha })=\sum _{k=0}^{\infty }\frac{(\gamma )_{k}(-\lambda )^{k}}{k!\varGamma (\alpha k+\beta )}t^{\alpha k}, \end{aligned}$$(3)where \((\gamma )_{n}\) is a Pochhammer symbol which is defined as \(\displaystyle \gamma (\gamma +1)\cdots (\gamma +n-1)\) and \((\gamma )_{n}=\displaystyle \frac{\varGamma (\gamma +n)}{\varGamma (\gamma )}\). The Laplace transform of Mittag-Leffler functions (1), (2) and (3) are given in [24].
In order to prove our main results we need the following fixed point theorem:
Theorem 1
[26] (Schauder’s Fixed Point Theorem) Let M be a compact, convex set in a Banach space X and \(T:M\rightarrow M\) be continuous. Then T has a fixed point M.
3 Linear Delay Systems
Consider the fractional delay dynamical systems with multiple delays in control
where \(0<\alpha < 1\), \(x\in \mathbb {R}^{n}\), \(u\in \mathbb {R}^{m}\) A, B are \(n\times n\) matrices and \(C_{i}\) are \(n\times m\) matrices for \(i=0, 1, 2, \ldots , M.\) Assume the following conditions
(H1) The functions \(\sigma _{i}: J\rightarrow \mathbb {R}, i=0, 1, 2, \ldots , M \) are twice continuously differentiable and strictly increasing in J. Moreover
(H2) Introduce the time lead functions \(r_{i}(t):[\sigma _{i}(0), \sigma _{i}(T)] \rightarrow [0, T]\), \(i=0, 1, 2, \ldots , M\) such that \(r_{i}(\sigma _{i}(t))=t\) for \(t\in J\). Further \(\sigma _{0}(t)=t\) and for \(t=T\), the following inequality holds
The following definitions of complete state of the system (4) at time t and relative controllability are assumed.
Definition 1
[27] The set \(y(t)=\{ x(t), \beta (t, s)\}\), where \(\beta (t, s)=u(s)\) for \(s\in [\min \ h_{i}(t), t)\) is said to be the complete state of the system (4) at time t.
Definition 2
System (4) is said to be relatively controllable on [0, T] if for every complete state y(t) and every \(x_{1}\in \mathbb {R}^{n}\) there exists a control u(t) defined on [0, T], such that the solution of system (4) satisfies \(x(T)=x_{1}\).
The solution of the system (4) by using Laplace transform is expressed as
where
and
Using the time lead functions \(r_{i}(t),\) the solution can be written as
where
By using the inequality (6) we get
For simplicity, let us write the solution as
where
Now let us define the controllability Grammian matrix
where the \(*\) denotes the matrix transpose.
Theorem 2
The linear system (4) is relatively controllable on [0, T] if and only if the controllability Grammian matrix is positive definite for some \(T>0\).
The proof this statement is similar to proof given by Balachandran et al. [15] by defining the control function as
4 Nonlinear Delay Systems
Consider the nonlinear fractional delay dynamical systems with multiple delays in control of the form
where \(0<\alpha <1,\) \(x\in \mathbb {R}^{n}\), \(u\in \mathbb {R}^{m}\) and A, B are \(n\times n\) matrices, \(C_{i}\) for \(i=0, 1, \ldots , M\) are \(n\times m\) matrices and \(f: J\times \mathbb {R}^{n}\times \mathbb {R}^{n}\times \mathbb {R}^{m} \rightarrow \mathbb {R}^{n} \) is a continuous function. Further we impose the following assumption
(H3) The continuous function f satisfies the condition that
uniformly in \(t\in J\), where \(p=|x|+|y|+|u|.\) Similar to the linear system, the solution of nonlinear system (10) using time lead function \(r_{i}(t)\) is given as
Theorem 3
Assume that the hypothesis (H1)–(H3) are satisfied and suppose that the linear fractional delay dynamical system (4) is relatively controllable. Then the nonlinear system (10) is relatively controllable on J.
Proof
Define \(\varPsi : Q\rightarrow Q\) by
where
and
Let
Then
and
By Proposition 1 in [28], the function f satisfies the following conditions. For each pair of positive constants c and d, there exists a positive constant r such that for \(|p|\le r\), then
Also, for given c and d, if r is a constant such that \(r<r_{1}\) will also satisfy (15). Now take c and d as given above and choose r so that (15) is satisfied. Therefore \(||x||\le \frac{r}{2}\) and \(||u||\le \frac{r}{2}\), then \(|x(s)|+|y(s)|\le r,\) for all \(s\in J\). It follows that \(d+c\sup |f|\le r.\) Therefore \(|u(s)|\le \frac{r}{4a}\) for all \(s\in J\) and hence \(||u||\le \frac{r}{4a}\), which gives \(||x||\le \frac{r}{2}.\) Thus,
then \(\varPsi \) maps Q(r) into itself. Our objective is to show that \(\varPsi \) has a fixed point, since f is continuous, it follows that \(\varPsi \) is continuous. Let \(Q_{0}\) be a bounded subset of Q. Consider a sequence \(\{(y_{j}, v_{j})\} \) contained in \(\varPsi (Q_{0})\), where we let
for some \((x_{j}, u_{j})\in Q_{0},\) for \(j= 1,2,\ldots \). Since f is continuous \(|f(s, x_{j}(s),x_{j}(s-h), u_{j}(s))|\) is uniformly bounded for all \(s\in J\), and \(j=1,2,3,\ldots \). It follows that \(\{(y_{j}, v_{j})\}\) is a bounded sequence in Q. Hence \(\{v_{j}(t)\}\) is equicontinuous and a uniformly bounded sequence on \([0, t_{1}]\). Since \(\{y_{j}(t)\}\) is a uniformly bounded and equicontinuous sequence on \([-h, t_{1}]\), an application of Ascoli’s theorem yield a further subsequence of \(\{(y_{j}, v_{j})\}\) which converges in Q to some \((y_{0}, v_{0}).\) It follows that \(\varPsi (Q_{0})\) is sequentially compact, hence, the closure is sequentially compact. Thus, \(\varPsi \) is completely continuous. Since Q(r) is closed, bounded and convex, the Schauder fixed point theorem implies that \(\varPsi \) has a fixed point \((x, u)\in Q(r)\), such that \((y, v)=\varPsi (x, u)=(x, u)\). It follows that
for \(t\in J\) and \(x(t)=\phi (t)\) for \(t\in [-h, 0]\)
Hence the system (10) is relatively controllable on J.
5 Examples
Example 1
Consider the linear fractional delay dynamical systems with delay in control by the fractional differential equation
where \(\alpha =\frac{3}{4}\), \(h=1\), \(\sigma =1\), \(A=\left( \begin{array}{cc} -1&{} 0\\ 0&{} -2 \end{array}\right) \), \(B=\left( \begin{array}{cc} 0&{}0\\ -1&{}0 \end{array}\right) \), \(C_{0}=\left( \begin{array}{c} 1\\ 0 \end{array}\right) \), and \(C_{1}=\left( \begin{array}{c} 0\\ 1 \end{array}\right) \) with initial state \(x(0)=\left( \begin{array}{c} 2\\ 4 \end{array}\right) \) and final state \(x(1)=\left( \begin{array}{c} 6\\ 8 \end{array}\right) \). The solution of the Eq. (17) by using Laplace transform is of the form
Now, consider the controllability on [0, 1], where [t] \(=\) 0, the solution is of the form
The Grammian matrix is defined as
where \(r_{i}(s)\) is a time lead function and it is defined as \(r_{0}(s)=s\) and \(r_{1}(s)=s-1\). Then the Grammian matrix is
which is positive definite. Then by the Theorem 1 the system is controllable on [0, 1].

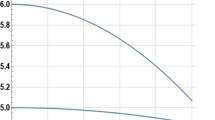
The trajectory of the dynamical system without control

The trajectory of the dynamical system with control
Figure 1 represent the trajectory of the system without control and Fig. 2 represent the trajectory of the system with control.
Example 2
Consider the nonlinear fractional delay dynamical system of the form
The matrices \(A, B, C_{0}\) and \(C_{1}\) are defined as above and the function f is taken as
Here also we consider the controllability on the [0, 1]. Since the linear system (17) is controllable and the nonlinear function (19) satisfies the hypothesis of the Theorem 2 we say that the nonlinear system (18) is controllable on [0, 1].
6 Conclusion
The relative controllability of nonlinear fractional delay dynamical system with time varying delay in control is discussed. The necessary and sufficient conditions for the relative controllability criteria for linear fractional delay system are obtained by constructing Grammian matrix. The controllability of nonlinear fractional delay dynamical systems is obtained by using the Schauder’s fixed point theorem. Examples with numerical simulation is given to examine the results developed.
References
Bellman, R., Cooke, K.L.: Differential Difference Equations. Academic, New York (1963)
Smith, H.: An Introduction to Delay Differential Equations with Application to the Life Sciences. Springer, New York (2011)
Halanay, A.: Differential Equations: Stability, Oscillations Time Lags. Academic, New York (1966)
Hale, J.: Theory of Functional Differential Equations. Springer, New York (1977)
Babiarz, A., Klamka, J., Niezabitowski, M.: Schauder’s fixed point theorem in approximate controllability problems. Int. J. Appl. Math. Comput. Sci. 26(2), 263–275 (2016)
Klamka, J., Babiarz, A., Niezabitowski, M.: Banach fixed point theorem in semilinear controllability problems - a survey. Bull. Pol. Ac. Tech. 64(1), 21–35 (2016)
Chow, T.S.: Fractional dynamics of interfaces between soft-nanoparticles and rough substrates. Phys. Lett. A 342(1), 148–155 (2005)
Magin, R.L.: Fractional Calculus in Bioengineering. Begell House, Redding (2006)
Mainardi, F.: Fractional calculus: some basic problems in continuum and statistical mechanics. In: Carpinteri, A., Mainardi, F. (eds.) Fractals and Fractional calculus in Continuum Mechanics, vol. 378, pp. 291–348. Springer, New York (1997)
Sabatier, J., Agrawal, O.P., Tenreiro-Machado, J.A.: Advances in Fractional Calculus: Theoretical Developments and Applications in Physics and Engineering. Springer, New York (2007)
Machado, J.T., Costa, A.C., Quelhas, M.D.: Fractional dynamics in DNA. Commun. Nonlinear. Sci. Numer. Simul. 16(8), 2963–2969 (2011)
Machado, J.T.: Analysis and design of fractional order digital control systems. Syst. Anal. Model. Simul. 27(2–3), 107–122 (1997)
Dauer, J.P., Gahl, R.D.: Controllability of nonlinear delay systems. J. Optim. Theory Appl. 21(1), 59–68 (1977)
Balachandran, K., Dauer, J.P.: Controllability of perturbed nonlinear delay systems. IEEE Trans. Autom. Control 32, 172–174 (1987)
Balachandran, K., Kokila, J., Trujillo, J.J.: Relative controllability of fractional dynamical systems with multiple delays in control. Comput. Math. Appl. 64(10), 3037–3045 (2012)
Balachandran, K., Zhou, Y., Kokila, J.: Relative controllability of fractional dynamical systems with delays in control. Commun. Nonlinear Sci. Numer. Simul. 17(9), 3508–3520 (2012)
Balachandran, K., Zhou, Y., Kokila, J.: Relative controllability of fractional dynamical systems with distributive delays in control. Comput. Math. Appl. 64(10), 3201–3209 (2012)
Klamka, J.: Controllability of linear systems with time variable delay in control. Int. J. Control 24(6), 869–878 (1976)
Klamka, J.: Relative controllability of nonlinear systems with delay in control. Automatica 12(6), 633–634 (1976)
Manzanilla, R., Marmol, L.G., Vanegas, C.J.: On the controllability of differential equation with delayed and advanced arguments. Abstr. Appl. Anal. (2010)
Mur, T., Henriquez, H.R.: Relative controllability of linear systems of fractional order with delay. Math. Control Relat. Fields 5(4), 845–858 (2015)
Joice Nirmala, R., Balachandran, K.: Controllability of nonlinear fractional delay integrodifferential systems. J. Appl. Nonlinear Dyn. 5, 59–73 (2016)
Joice Nirmala, R., Balachandran, K., Germa, L.R., Trujillo, J.J.: Controllability of nonlinear fractional delay dynamical systems. Rep. Math. Phys. 77(1), 87–104 (2016)
Kilbas, A., Srivastava, H.M., Trujillo, J.J.: Theory and Application of Fractional Differential Equations. Elsevier, Amstrdam (2006)
Podlubny, I.: Fractional Differential Equations. Academic, New York (1999)
Granas, A., Dugundji, J.: Fixed Point Theory. Springer, New York (2003)
Balachandran, K.: Global relative controllability of non-linear systems with time-varying multiple delays in control. Int. J. Control. 46(1), 193–200 (1987)
Dauer, J.P.: Nonlinear perturbations of quasi-linear control systems. J. Math. Anal. Appl. 54(3), 717–725 (1976)
Acknowledgments
The work was supported by the [University Grants Commission] under grant [number: MANF-2013-14-CHR-TAM-25156] from the government of India.
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2017 Springer International Publishing AG
About this paper
Cite this paper
Rajagopal, J.N. (2017). Relative Controllability of Nonlinear Fractional Delay Dynamical Systems with Time Varying Delay in Control. In: Babiarz, A., Czornik, A., Klamka, J., Niezabitowski, M. (eds) Theory and Applications of Non-integer Order Systems. Lecture Notes in Electrical Engineering, vol 407. Springer, Cham. https://doi.org/10.1007/978-3-319-45474-0_33
Download citation
DOI: https://doi.org/10.1007/978-3-319-45474-0_33
Published:
Publisher Name: Springer, Cham
Print ISBN: 978-3-319-45473-3
Online ISBN: 978-3-319-45474-0
eBook Packages: EngineeringEngineering (R0)