
Abstract
Dynamical systems are considered that consist of a main rigid body and one or several movable internal bodies. The internal bodies interact with the main one by forces created and controlled by drives but do not interact with the environment. The motion of the internal bodies affects the main body, and it can move progressively under the influence of resistance forces produced by the environment. Different kinds of resistance forces are considered including Coulomb’s friction, piecewise linear and quadratic resistance. Periodic motions of the internal bodies and the corresponding translational motion of the main body are analyzed. The average speed of the system locomotion is evaluated and optimized with respect to the system parameters and control.
Access provided by CONRICYT-eBooks. Download chapter PDF
Similar content being viewed by others

1 Introduction
Consider a dynamical system that consists of main rigid body and one or several internal bodies that can move relative to the main one. The main body is placed inside the environment that exerts resistance forces upon this body, see Fig. 1. The resistance forces can be caused by the fluid outside the main body (Fig. 1a) or by the friction of the body over a rough plane (Fig. 1b). The internal bodies interact with the main one by forces created and controlled by drives but do not interact with the environment. The motion of the internal bodies affects the main one, and it can move under the influence of the outer resistance forces.
If the internal bodies perform specific periodic motions within the bounded volume inside the main body, the latter can, under certain conditions, perform a translational movement in the external environment.

Mechanical systems
This principle of locomotion can be useful for mobile robots. An advantage of these robots is that they do not need any outer propelling devices such as wheels, legs, and propellers. They can be readily made hermetic without any protruding devices. Such robots can be useful for the motion inside vulnerable and aggressive media, in narrow slots and tubes to perform various technological operations. This principle of locomotion was applied to robotic systems in [3, 8, 11, 12].
The dynamics of systems controlled by the periodic motions of internal masses was first analyzed in [4, 5] for the case of Coulomb’s friction force acting upon the main body. The average speed of locomotion was evaluated. Optimal parameters of the internal periodic motion were found that correspond to the maximum average locomotion speed. Experimental data confirming the obtained theoretical results are presented in [9, 10].
Other cases of resistance forces acting upon the main body were considered in [2, 6, 7]. Here, optimal parameters and optimal controls were also found. The case of two internal masses moving along horizontal and vertical directions was analyzed in [1].
In this paper, the results on dynamics and optimization for systems controlled by internal moving masses are described, summarized, and discussed.
2 Mechanical Systems
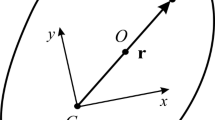
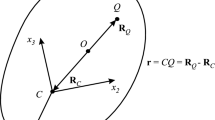
A mechanical system consists of a main body of mass M and an auxiliary internal body of mass m. The main body moves in the outer medium and is subjected to the resistance force R, see Fig. 1. The internal body can move inside the main one and does not interact with the outer medium. Denote by x and v the absolute displacement and velocity, respectively, of the main body, and by ξ, u, and w the displacement, velocity, and acceleration, respectively, of the internal body relative to the main one.
The kinematic equations have the form
whereas the dynamical equation can be written as follows:
where the following notation is introduced:
Several kinds of resistance forces acting upon the main body are considered, namely the dry friction obeying Coulomb’s law:
linear resistance:
and quadratic resistance:
The coefficients k in Eqs. (2)–(4) are constant in the case of isotropic resistance. For the anisotropic resistance, these coefficients depend on direction of motion:
3 Internal Motions
Let the internal body move periodically with period T relative to the main body, so that for all t
We assume that this motion is bounded:
Without loss of generality, suppose that the internal body starts its motion at the left end of the interval [0, L] and reaches the right end of this interval at the instant of time θ. Then we have
Let us consider two simple versions of possible internal motions satisfying (6)–(8).
-
1.
The relative velocity u(t) is piecewise constant and has two phases (Fig. 2):
$$\displaystyle{ u(t) = u_{1},\quad \mbox{ if}\quad t \in (0,\theta );\quad u(t) = -u_{2},\quad \mbox{ if}\quad t \in (\theta,T). }$$(9)Velocities u i in (9) are assumed to be bounded by a given constant U:
$$\displaystyle{ 0 <u_{i} \leq U,\quad i = 1,2. }$$(10) -
2.
The relative acceleration w(t) is piecewise constant and has three phases:
$$\displaystyle\begin{array}{rcl} w(t)& =& w_{1},\quad \mbox{ if}\quad t \in (0,\tau _{1}),\quad w(t) = -w_{2},\quad \mbox{ if}\quad t \in (\tau _{1},\tau _{1} +\tau _{2}), \\ w(t)& =& w_{3},\quad \mbox{ if}\quad t \in (\tau _{1} +\tau _{2},T). {}\end{array}$$(11)
Here, τ 1 and τ 2 are positive constants, accelerations w i are bounded by constant W:

Velocity control and acceleration control cases
The two cases described above will be referred to as velocity and acceleration control cases, respectively. They correspond to different possibilities of actuators controlling the relative motion of the internal body. The graphs of the relative velocity for these cases are shown in Fig. 2. Note that each of these control modes has the minimal possible number of intervals of constant control compatible with the conditions imposed by (6)–(8): two intervals for the velocity control and three for the acceleration control.
The following requirements are imposed on the motion of the main body:
-
(a)
The velocity v(t) is periodic with the same period T as the period of the internal motion in (6): v(t + T) = v(t) for all t.
-
(b)
For the initial velocity v(0) = v 0, two alternative assumptions are made: either v 0 = 0, or v 0 is a free parameter to be chosen.
The total displacement of the system for the period of motion Δ x and its average velocity V are defined as
We will determine the optimal parameters of the velocity and acceleration controls that correspond to the maximum average speed V for various resistance forces under the imposed conditions (a) and (b).
4 Linear and Quadratic Resistance
Consider first the case of the linear isotropic resistance defined by Eq. (3). By integrating both sides of Eq. (1) over period T, it can be shown easily that Δ x = 0 for any periodic internal motion ξ (t). Hence, in the linear isotropic medium, the main body will only oscillate about some mean position, and the progressive motion is impossible.
The optimal velocity control described by Eqs. (9) and (10) was obtained for the cases of anisotropic linear and quadratic resistance [7].
We assume that the initial velocity v 0 in condition (b) is chosen so as to maximize the average velocity V. Then the maximum average velocity for the linear anisotropic case described by (3) and (5) is given by
where the following notation is used:
The velocity V max in (14) is positive, if and only if the resistance for the forward motion is smaller than for the backward one: k + < k −.
Similarly, the case of the quadratic anisotropic resistance defined by (4) and (5) has been considered. Contrary to the linear resistance, here the maximum average velocity is positive even in the isotropic case. We have
More general case of resistance forces was analyzed in [2]. For a wide class of functions r(v) in Eq. (1), the optimal relative acceleration \(\ddot{\xi }(t)\) subject to the bounds \(\mid \ddot{\xi }\mid \leq W\) was found that provides the maximum value of Δ x and V for a given T. The optimal control \(\ddot{\xi }(t)\) has up to four different intervals; on two of them, the control reaches the bounds imposed; the other two intervals are singular control arcs where the velocity of the main body v(t) is constant.
5 Dry Friction
Consider now an important case of the dry friction obeying Coulomb’s law (2). This case under the condition that v 0 = 0 was analyzed in [5]; for free v 0 that can be chosen in an optimal way, it was investigated in [6]. The analysis for the anisotropic friction is rather complicated. Here, we will present some final results only for the case of isotropic friction with coefficient k.
For the velocity control defined by Eqs. (9) and (10) and for the case with v 0 = 0, we have
if the maximal admissible U in (10) satisfies the inequality
If inequality (16) is violated, the motion under consideration is impossible.
For the velocity control and the case where v 0 can be chosen arbitrarily, we have
if the following inequality:
is satisfied. Otherwise, the motion is impossible.
Comparing inequalities (16) and (18), we see that the case with a free value of v 0 can be realized in a wider range of admissible velocities U. Under the condition U ≥ u 0 where the both types of motion can be implemented, the motion with a free value of v 0 provides a higher average velocity V max (compare (15) and (17) for U ≥ u 0), which is quite natural.
Let us consider now the acceleration control defined by (11) under the condition v 0 = 0. Here, the motion is possible, if and only if the maximal possible acceleration W of the internal body in (12) satisfies the inequality
Under this condition, the maximal possible velocity of the main body is given by formulas [5]:
where Y is defined by (19).
The analysis of optimal motions for the velocity and acceleration control cases showed that, for the velocity control, the motion of the main body consists of alternating forward and backward motions, whereas for the acceleration control, there are only forward motions and intervals of rest.
Let us compare the maximal speeds of motion (15) and (20) for v 0 = 0 and unbounded internal motions, i.e., for U → ∞ and W → ∞.
We obtain
for the velocity and acceleration control cases, respectively. Thus, the maximal speeds are of the same order of magnitude, the acceleration control providing a higher speed.
If the main body contains two internal bodies moving in the horizontal and vertical directions, respectively, this can give additional possibilities to increase the average speed of locomotion. The internal body moving in the vertical direction causes the change in the normal reaction and, hence, in the friction force acting upon the main body. Optimal control of two internal bodies moving along horizontal and vertical directions within the main one was obtained in [1].

Inverted pendulum and capsubot
The principle of locomotion based upon the controlled displacement of internal masses was implemented in a number of experimental models. In Fig. 3, the internal motion is performed by an inverted pendulum that oscillates about the vertical equilibrium position [9]. The system called capsubot and shown in Fig. 3 contains an internal mass that is driven by an electromagnetic actuator and oscillates inside the main body [10]. The cart shown in Fig. 4 carries eccentric rotating wheels and moves along a horizontal plane. Here, the internal masses move both in the horizontal and vertical directions.

Cart with rotors and vibro-robot in a tube
Mini-robots based on the locomotion principle described above that can move inside tubes were created in the Institute for Problems in Mechanics [8]. These vibro-robots are driven by electromagnetic actuators and move inside horizontal, vertical, sloping, and curved tubes of a diameter of 4–50 mm with a speed of 0.1–0.3 m/s. They can carry various sensors and perform inspection as well as other operations (Fig. 4).
6 Conclusions
Locomotion of a rigid body controlled by internal moving masses is discussed. Certain classes of periodic motions of the internal masses are examined. The system can move inside a resistive medium; different types of resistance forces are considered. The average velocity of locomotion is evaluated. The optimal parameters of the internal motion are found that correspond to the maximum locomotion speed. Experimental models of mobile robots are described that implement the principle of locomotion analyzed in the paper.
References
Bolotnik NN, Figurina TYu (2008) Optimal control of the rectilinear motion of a rigid body on a rough plane by the displacement of two internal masses. J Appl Math Mech 72(2):126–135
Bolotnik NN, Figurina TYu, Chernousko FL (2012) Optimal control of the rectilinear motion of a two-body system in a resistive medium. J Appl Math Mech 76(1):1–14
Breguet J-M, Clavel R (1998) Stick and slip actuators: design, control, performances and applications. In: Proceedings of the international symposium micromechatronics and human science (MHS). IEEE, New York, pp 89–95
Chernousko FL (2005) On the motion of a body containing a movable internal mass. Dokl Phys 50(11):593–597
Chernousko FL (2006) Analysis and optimization of the motion of a body controlled by a movable internal mass. J Appl Math Mech 70(6):915–941
Chernousko FL (2008) On the optimal motion of a body with an internal mass in a resistive medium. J Vib Control 14(1–2):197–208
Chernousko FL (2008) The optimal periodic motions of a two-mass system in a resistant medium. J Appl Math Mech 72(2):202–215
Gradetsky V, Solovtsov V, Kniazkov M, Rizzotto GG, Amato P (2003) Modular design of electro-magnetic mechatronic microrobots. In: Proceedings of the 6th international conference climbing and walking robots (CLAWAR), Catania, Italy, pp 651–658
Li H, Firuta K, Chernousko FL (2005) A pendulum-driven cart via internal force and static friction. In: Proceedings of the international conference “physics and control”, St.-Petersburg, Russia, pp 15–17
Li H, Firuta K, Chernousko FL (2006) Motion generation of the Capsubot using internal force and static friction. In: Proceedings of the 45th IEEE conference decision and control, San Diego, CA, USA, pp 6575–6580
Schmoeckel F, Worn H (2001) Remotely controllable mobile microrobots acting as nano positioners and intelligent tweezers in scanning electron microscopes (SEMs). In: Proceedings of international conference on robotics and automation, vol 4, New York, pp 3903–3913
Vartholomeos P, Papadopoulos E (2006) Dynamics, design and simulation of a novel microrobotic platform employing vibration microactuators. Trans ASME J Dyn Syst Meas Control 128:122–133
Acknowledgements
The work was supported by the Russian Foundation for Basic Research (Projects 14-01-00061 and 15-51-12381).
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2017 Springer International Publishing Switzerland
About this chapter
Cite this chapter
Chernousko, F.L. (2017). Dynamics and Control of Motion for Systems Containing Internal Moving Masses. In: Irschik, H., Belyaev, A., Krommer, M. (eds) Dynamics and Control of Advanced Structures and Machines. Springer, Cham. https://doi.org/10.1007/978-3-319-43080-5_19
Download citation
DOI: https://doi.org/10.1007/978-3-319-43080-5_19
Published:
Publisher Name: Springer, Cham
Print ISBN: 978-3-319-43079-9
Online ISBN: 978-3-319-43080-5
eBook Packages: EngineeringEngineering (R0)