
Abstract
The reasons for doing active vibration control are emphasized as well as the principles of the basic approaches. Feedback and feedforward vibration compensation approaches are discussed from a unified point of view. The high performance required in the presence of variability of the vibration characteristics leads to the use of robust and adaptive designs for active vibration control systems. The challenges related to these approaches are described.
Access provided by CONRICYT-eBooks. Download chapter PDF
Similar content being viewed by others


Keywords
These keywords were added by machine and not by the authors. This process is experimental and the keywords may be updated as the learning algorithm improves.
1 Active Vibration Control: Why and How
Vibrations are present almost everywhere and their presence often causes problems for the operation of the various systems. Vibrations are disturbances that affect a system (see also [1, 2]). They have a variety of origins, some examples of which are: geological disturbances, traffic, mechanical engines, motor operation, and electrical drives.
High-precision measurements, high-precision drives (like memory disc drives, Blu-ray, DVD and CD drives), photo and video cameras, and stabilized platforms require solutions for keeping the effect of these disturbances at a very low level. In transport systems (ground, water, or air) the vibrations can have a destructive effect and they also affect the comfort of the passengers. Reduction of vibration effects is mandatory in manufacturing systems and stabilized platforms in which the tolerances imposed on their various tasks are of a similar magnitude to the effect of the vibration.
The use of passive vibration absorbers (fluid dampers, elastomers, and so on) is a well-known solution but unfortunately not sufficient in many cases for assuring the desired level of attenuation over the desired frequency range. Semi-active (semi-passive) dampers, for which the properties of the absorbing material can be changed allow an improvement of the expected performance in some cases; however, when high-performance attenuation is needed an active control solution should be considered.
From a mechanical point of view, one makes a distinction between active vibration isolation and active vibration control (AVC). In active vibration isolation, an active damper (suspension) is inserted between the source of vibration and the mass that has to be isolated. In active vibration control a force, which will counteract the effect of the incoming vibrations, is generated through an actuator driven from the available measurements (force or acceleration) of disturbance. In short, the compensating force should be of the same magnitude but in opposite phase.
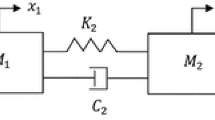
An active hydraulic isolation system is presented in Fig. 1.1. The size of the main chamber of the elastomer cone located between the source of vibrations and the chassis is modified by the effect of a piston controlled through a linear motor (which develops a force). An AVC system is shown in Fig. 1.2. In this example, the objective is to reduce the vibrations created by the motor at the level of the chassis. By means of actuators, an opposite vibration force is introducedFootnote 1 to the chassis with a shift phase of \(180^\circ \).

Active isolation system used to reduce the effect of vibrations on the chassis

Active vibration control used to reduce the effect of vibrations on the chassis
Vibrations are usually measured by accelerometers or force sensors. Actuators are typically active dampers, inertial motors (working on the same principle as loudspeakers), piezoelectric actuators.
From a control point of view, active vibration control and active vibration isolation are almost identical problems that can be solved using feedback control or feedforward disturbance compensation if information on the disturbance is available.
Another problem, related to active isolation, is the active damping. Despite the fact that they provide good attenuation over a wide band of frequencies, passive dampers have a significant resonant peak at a certain frequency in the range of operation. Adding active damping by feedback will correct this feature. Figure 1.3 illustrates this behaviour by showing the power spectral density (PSD) of the residual force without and with active damping. One can see that the resonance effect around 30 Hz has been attenuated with negligible deterioration of the damping performances at other frequencies. Active damping consists of damping the corresponding vibration mode without changing its frequency.Footnote 2

Power spectral density of the residual force without and with active damping on an active suspension system
In active vibration (isolation) control one distinguishes between two “paths”:
-
the “primary path” through which the disturbances propagate towards the system; and
-
the “secondary path” through which the compensation effect is applied.
Since from a control point of view there are no differences between active isolation and active vibration control we will use the generic term “Active Vibration Control” (AVC).
The principles of AVC and active noise control (ANC) are similar. Of course the range of frequencies and the type of instrumentation involved are different but the same control techniques can be used; however, the present book will focus on adaptive and robust active vibration control and the applications will concern this field.
The books [3, 4] give a compact and clear presentation of the origin and evolution of active vibration control techniques. It should be mentioned that these techniques have often been invented by researchers in the areas of vibration isolation and signal processing. The book [5] focuses on the dynamic modelling of active structures from physics equations and develops continuous-time feedback strategies based on these models.
The interest of the automatic control community in AVC is much more recent (it started essentially in the 1990s). The objective of the present book is to look at the problem of AVC from the perspective provided by automatic control methodology. From this perspective, the vibrations that we would like to attenuate strongly (or eliminate) are generically termed “disturbances”.
Two of the major objectives of automatic control are:
-
attenuation (or total rejection) of disturbances by feedback and feedforward actions; and
-
damping of vibration modes.
These two problems are different. Adding damping is related to the assignment by feedback of desired closed-loop poles while strong attenuation (or total rejection) of disturbances are related to the introduction of the disturbance model in the controller (the internal model principle).
In AVC and ANC, disturbances can be characterized by their frequency content and their location in a specific region in the frequency domain. The disturbances can be of narrow-band type (simple or multiple) or of broad-band type. Of course, a combination of both is possible and, in certain cases, what we call broad-band may be several finite-band disturbances over separated small regions in the frequency domain; however, the distinction between these two types of disturbances is convenient in order to examine the techniques used for their compensation.
Fundamentally, in active control a compensator system is introduced, which will generate a “secondary” source. This compensator (acting through the “secondary path”) will, when conveniently driven, interfere destructively with the disturbance coming from the “original” (in general non-accessible) primary source through what is called the “primary path”. In the control terminology the “secondary path” is the plant to be controlled in order to reduce, as much as possible, the effect of the disturbance on the controlled output, which in the case of AVC is the measured residual acceleration or force. To achieve this, generically a feedback controller will be used (see Fig. 1.4).
An important concept, which allows one to assess the disturbance attenuation properties, damping of the vibration modes, stability of the feedback control loop, and robustness, is the so-called “output sensitivity function” (the transfer function between the disturbance and the measured output, i.e. between p(t) and y(t) in Fig. 1.4). There are some fundamental issues when approaching the problem of attenuating the disturbances by feedback. The first is related to the properties of the famous “Bode integral” on the modulus of the output sensitivity function expressed in dB, which has value zero if the system is open-loop stableFootnote 3 (i.e. the sum of the areas above and under the 0 dB axis taken with their sign is zero). Since the objective is to strongly attenuate (or even totally reject asymptotically) the disturbance, this may require significant holes (low values) in the magnitude of the sensitivity function, which in turn (even with a very careful design) may lead to an unacceptable “water bed” effect, both in terms of performance (one amplifies at certain frequencies where some disturbance can still be present) as well as in terms of robustness (the modulus margin may become unacceptableFootnote 4). Figure 1.5 illustrates the Bode Integral. As the attenuation is augmented in a certain frequency range, the maximum of the modulus of the output sensitivity function increases. Therefore there are inherent limitations in using feedback for active vibration control.Footnote 5

Block diagram of active vibration compensation by feedback
A fundamental result in feedback control, which is of great interest for the problem of vibration attenuation, is the “internal model principle” (IMP), which stipulates that the disturbance will be asymptotically cancelled if, and only if, the controller contains the “model of the disturbance”.
This brings in view the concepts of “plant model” and “disturbance model”. In order to design the feedback controller properly, knowledge of the “plant model” and the “disturbance model” is necessary. The control methodology is a “model-based design” known as MBC (model based control).
One should distinguish between a “knowledge plant model” and a “dynamic plant model”. The “knowledge plant model” is obtained from the law of physics and mechanics describing the operation of the compensator system. Unfortunately, these models are often not precise enough, since on one hand their precision depends on the perfect knowledge of some physical parameters (which is hard to get) and on the other hand it is difficult to model all the elements constituting the compensator system. For this reason one uses what is called the “control dynamic plant model”, i.e. a kind of filter (parametric model) that describes the dynamical relationship between the variations of the control input and the variations of the output of the system. This kind of model, necessary for design, can be obtained directly from an experimental test using the techniques of “System Identification” (this will be discussed in Chaps. 5 and 6).
In most AVC systems the characteristics of the compensator systems remain almost unchanged during operation. This means that the associated dynamic control model remains almost unchanged and therefore the parameters of the identified model are almost constant.

Modulus of the output sensitivity functions for various attenuations
Nevertheless, for controller design we need the “model of the disturbance” in addition. A common framework is the assumption that the disturbance is the result of white noise or a Dirac impulse passed through the model of the disturbance. The knowledge of this model together with the knowledge of the model of the secondary path (compensator) allows the design of an appropriate control strategy. In practice, in most of the cases the characteristics of these disturbances are unknown or time-varying. While in some particular cases (with a limited range of variations in the frequency of the vibrations) a robust design can be considered (see the example given in Sect. 11.3 as well as [8–10]), in most situations, as a consequence of the high level of attenuation required, an adaptive approach is necessary to obtain a good tuning with respect to the disturbance characteristics (note that the adaptive loop can be added on top of a robust controller—see Sect. 12.2).
When the limitations induced by the Bode integral do not allow the achievement of the desired performances by feedback (in particular for the case of broad-band disturbances), one has to consider adding a feedforward compensation, which requires a “source” correlated with the disturbance to be attenuated.Footnote 6
In a number of applications of AVC and ANC, an image of the disturbances (a correlated measurement) acting upon the system can be made available. This information is very useful for attenuating the disturbances using a feedforward compensation scheme; however, the feedforward compensator filter will depend not only upon the dynamics of the compensator system (the plant) but also upon the characteristics of the disturbances and of the primary path (the transfer function between the source and the residual acceleration or force).
2 A Conceptual Feedback Framework
Figure 1.6 represents an active noise and vibration control (ANVC) system using both feedforward and feedback compensators. The system has two inputs and two outputs. The first input is the disturbance w(t), which is generated by the unknown disturbance source s(t) passed through a filter with unknown characteristics. The second input is the control signal, u(t). The first output is the measurement of the residual acceleration (force, noise) e(t) (also called the performance variable) and the second output is a signal correlated with the unknown disturbance, \(y_1(t)\) in Fig. 1.6. This correlation is a result of the physical characteristics of the system.
As shown in Fig. 1.6, the path that transmits the filtered disturbance, w(t), to the residual acceleration is called the primary path. The control signal, on the other hand, is transmitted to the residual acceleration through the secondary path. The residual acceleration (the performance variable) is formed by addition between the output of the primary path, denoted x(t), and the output of the secondary path, denoted z(t).
In general, ANVC systems also present a positive coupling path (also called the reverse path) between the control signal u(t) and the measured signal \(y_1(t)\), which is shown in Fig. 1.6. This results in an internal positive feedback that can destabilize the ANVC system if not taken into account. The objective is that of minimizing the performance variable, e(t), and stabilizing the system, by computing an appropriate control, u(t), based on the measurements e(t) and \(y_1(t)\).

Block diagram representation of the combined feedforward–feedback control problem
One can see that, in the control system architecture presented in Fig. 1.6, the control signal u(t) is obtained by the subtraction of the feedback control, \(u_{2}(t)\), from the feedforward control, \(u_{1}(t)\). The measurements obtained from the system can be put into a vector form as \(y(t) = [y_{1}(t),~y_{2}(t)]^T = [y_{1}(t),~e(t)]^T\). As a consequence, the controller also has a vector representation \(\kappa = [N,~-K]^T\), where N and K denote, respectively, the feedforward and the feedback compensators.
With this notation, the equation relating the measurements to the control signal is given by

Generalized ANVC system representation
The feedforward controller denomination attributed to N is motivated by the fact that \(y_{1}(t)\), called the correlated image of the disturbance, is measured upstream of the performance variable (see the bench test described in Sect. 2.3). This also assumes that it is physically possible to obtain such a measurement. The situations where this is not possible constitute feedback control problems, while the others are more generally referred in the literature as hybrid control. A standard feedback representation in the form of a 2-inputs–2-outputs system as shown in Fig. 1.7 can also be considered. This representation is very well known in robust and optimal control (see also [11]).
The equations associated with the feedback system representation are
where D, G, and M correspond to the models of the primary, secondary, and reverse paths. The control is given by (1.1).
3 Active Damping
As indicated previously, active damping concerns augmentation of the damping of some vibration modes characterizing a mechanical structure (the frequencies of these modes are not changed). Nevertheless, damping of these low-frequency vibration modes will influence the “output sensitivity function” as a consequence of the Bode integral property. Adding strong damping at a resonance will induce a deterioration of the attenuation performances in the nearby frequency region. In fact active damping requires careful shaping of the output sensitivity function in order to bound the loss of performance at other frequencies by distributing the “water bed” effect across a wide frequency band (see Fig. 1.3).Footnote 7 The design of active damping will be discussed and illustrated in Chap. 10.
4 The Robust Regulation Paradigm
In the context of AVC (as well as for ANC) the primary sense of robustness is the capacity of attenuating disturbances located in a given range of frequencies but whose frequency characteristics are not exactly known. The characteristics (the model) of the disturbances are generally unknown and may be time-varying. As a consequence, their location in the frequency domain will change. It is not possible to design a robust linear controller that introduces a strong attenuation over a wide frequency range (as a consequence of the Bode integral). Therefore, a compromise is required between the width of the frequency region where the disturbance may be located and the attenuation that can be achieved. If one absolutely needs a strong attenuation, the tolerated range of frequency variation will be small. Conversely, if there is great uncertainty in the location of the disturbances in the frequency domain, then the attenuation that can be achieved will be small.
The secondary sense of robustness is the capacity of the linear controller to handle small uncertainties on the system model parameters in the vicinity of their nominal values. The system parameter uncertainties will be handled by respecting constraints on the modulus of the output and input sensitivity functions.Footnote 8
The situations where a robust controller solution for AVC provides satisfactory results in practice, depend upon the compromise between the level of attenuation required and the range of frequency variations of the disturbances (see Chap. 11 for applications of linear robust control design).
5 The Adaptive Regulation Paradigm
Since the characteristics (the models) of the disturbances are generally unknown and may be time-varying over a wide frequency range, often a single robust linear controller that achieves the desired attenuation cannot be designed. In such situations adaptive feedback or feedforward compensation has to be used.

Adaptive feedback attenuation of unknown disturbances
Figure 1.8 illustrates the adaptive attenuation of disturbances by feedback. In addition to the classical feedback loop an adaptation loop tunes the parameters of the controller in real time. In order to do so, it uses, as primary information, both the residual acceleration (force), which is a performance variable, and the control input.
Figure 1.9 illustrates the adaptive rejection of unknown disturbances by feedforward compensation. A “well-located” transducer can provide a measurement highly correlated with the unknown disturbance (a good image of the disturbance). This information is applied to the control input of the secondary path through an adaptive filter whose parameters are adapted so as to minimize the effect of the disturbance on the output.
Adaptive feedforward vibration (or noise) compensation is currently used in AVC and ANC when an image of the disturbance is available [12].
Nevertheless, at the end of the 1990s it was pointed out that in most of these systems there is a physical “positive” feedback coupling between the compensator system and the measurement of the image of the disturbance (vibration or noise) [13–16] (see also Sect. 1.2).Footnote 9 The inherent internal physical positive feedback may cause instability of the AVC or ANC systems. As a consequence, the development of adaptive algorithms for feedforward compensation should take into account the internal positive feedback.
So at this point one can say that one has two types of disturbances:
-
single or multiple narrow-band disturbances; and
-
broad (finite)-band disturbances;
and two approaches for doing adaptive disturbance attenuation:
-
the adaptive feedback approach (which only requires a measurement of the residual force or acceleration); and
-
the adaptive feedforward compensation (requiring an additional transducer for getting a correlated measurement with the disturbance).

Adaptive feedforward compensation of unknown disturbances
In addition, there are two possible modes of operation:
-
self-tuning operation (in which the adaptation procedure starts either on demand or when the performance is unsatisfactory and ends when the new controller is estimated); and
-
adaptive operation (in which the adaptation procedure is performed continuously and the controller is updated at each sampling).
As indicated earlier, a common framework is the assumption that the disturbance is the result of white noise or a Dirac impulse passed through the model of the disturbance. Knowledge of this model allows the design of an appropriate controller. In general, the structure for such a model of disturbance does not change and can be assessed from data (using spectral analysis or order estimation techniques); however, the parameters of the model are unknown and may be time-varying. Therefore adaptation has to deal with the change in the parameters of the model of the disturbance.
The classical adaptive control paradigm deals with the construction of a control law when the parameters of the plant dynamic model are unknown and time-varying [17]. Nevertheless, in the present context, the plant dynamic model is almost invariant and it can be identified. The objective then is the rejection of disturbances characterized by unknown and time-varying disturbance models. It seems reasonable to call this paradigm adaptive regulation. Classical adaptive control focuses on adaptation of the controller parameters with respect to plant model parameters while adaptive regulation focuses on adaptation of the controller parameters with respect to variations in the disturbance model parameters.
In adaptive regulation the plant model is assumed to be known (obtained, for example by system identification). It is also assumed that the possible small variations or uncertainties of the plant model can be handled by a robust control design.
Adaptive regulation covers both adaptive feedback compensation and adaptive feedforward compensation since, on the one hand, adaptation has to deal with the change in the characteristics of the disturbances and, on the other hand, adaptive feedforward compensation is still a feedback structure as a consequence both of the internal positive coupling and of the presence of the adaptation loop, which is driven by the residual error.
The problem of adaptive regulation as defined above has been previously addressed in a number of papers ([18–28]) among others. Landau [29] presents a survey of the various techniques (up to 2010) used in adaptive feedback regulation as well as a review of a number of applications.
An international benchmark on the attenuation of multiple and unknown time-varying, narrow-band disturbances by feedback has been organized. The test bench was the AVC system that will be presented in Sect. 2.2. The results are summarized in [7] and allow the comparative evaluation of various designs.
6 Concluding Remarks
In order to reduce the impact of vibrations, one has several solutions related to the demanded performance:
-
Passive: use materials with vibration attenuation properties.
-
Semi-active: change the attenuation properties of the materials used for attenuation.
-
Active: use compensation force to counteract vibrations.
-
Robust AVC: when the characteristics of the vibrations are almost known and their domain of variation is small.
-
Adaptive AVC: when the characteristics of vibrations are unknown and/or time-varying over a significant frequency range and high attenuation is required.
Design of robust AVC requires the model of the disturbances (and their domain of variation) as well as the models of the secondary path (for the feedback and feedforward approach) and of the primary path (for the feedforward approach).
Design of adaptive active vibration control does not require either the model of the disturbance or the model of the primary path.
7 Notes and Reference
The books [3–5] offer complementary perspectives to AVC and provide many practical examples. In particular the modelling aspects starting from basic laws of physics are enhanced.
Comparative evaluation of various techniques proposed is important. The European Journal of Control, no. 4, 2013 [7] is dedicated to a benchmark on adaptive attenuation of unknown and time-varying multiple narrow-band disturbances. The reference [30] should also be considered.
The references [29, 31–36] survey various aspects of AVC. Specific references related to the various topics will be provided at the end of the corresponding chapters.
It is not the objective of this book to provide an exhaustive reference list presenting applications of adaptive and robust AVC but a limited list of references covering applications in a number of fields include [3, 4, 26, 29, 37–44].
The special issue of International Journal of Adaptive Control and Signal Processing on adaptive frequency estimation with applications [45] gives a view of some recent research results in the field. This special issue includes [46–53].
Notes
- 1.
In these two examples the actuators are driven by a feedback controller, but in other cases the actuator can be driven by a feedforward compensator.
- 2.
Light mechanical structures are characterized by multiple low damped vibration modes. These modes have to be damped since on the one hand they can become a source of vibration and on the other environmental disturbances can lead to inadmissible movements of the structure.
- 3.
Both the controller and the plant to be controlled are stable.
- 4.
The modulus margin is the minimum distance between the open-loop transfer function hodograph and the Nyquist point and is equal to the inverse of the maximum of the modulus of the sensitivity function [6].
- 5.
- 6.
The source is located upstream with respect to the location where the residual force (acceleration) or noise is measured.
- 7.
The resulting controller may be of high order and this raises the problem of controller order reduction, which will be discussed in Chap. 9.
- 8.
The input sensitivity function is the transfer function between the disturbance p(t) and the control input u(t) (see Fig. 1.4).
- 9.
This will be illustrated on the experimental platform that will be presented in Sect. 2.3.
References
Li S, Qiu J, Li J, Ji H, Zhu K (2012) Multi-modal vibration control using amended disturbance observer compensation. IET Control Theory Appl 6(1):72–83. doi:10.1049/iet-cta.2010.0573
Li S, Li J, Mo Y, Zhao R (2014) Composite multi-modal vibration control for a stiffened plate using non-collocated acceleration sensor and piezoelectric actuator. Smart Mater Struct 23(1):1–13
Fuller C, Elliott S, Nelson P (1999) Active control of vibration. Academic Press, Cambridge
Elliott S (2001) Signal processing for active control. Academic Press, San Diego, California
Preumont A (2011) Vibration control of active structures—an introduction. Springer, Heidelberg
Landau I, Zito G (2005) Digital control systems—design, identification and implementation. Springer, London
Landau ID, Silva AC, Airimitoaie TB, Buche G, Noé M (2013) Benchmark on adaptive regulation—rejection of unknown/time-varying multiple narrow band disturbances. Eur J Control 19(4):237–252. doi:10.1016/j.ejcon.2013.05.007
Alma M, Martinez J, Landau I, Buche G (2012) Design and tuning of reduced order H\(_\infty \) feedforward compensators for active vibration control. IEEE Trans Control Syst Technol 20(2):554–561. doi:10.1109/TCST.2011.2119485
Rotunno M, de Callafon R (2003) Design of model-based feedforward compensators for vibration compensation in a flexible structure. Internal report, Dept. of Mechanical and Aerospace Engineering. University of California, San Diego
Carmona J, Alvarado V (2000) Active noise control of a duct using robust control theory. IEEE Trans. Control Syst Technol 8(6):930–938
Tay TT, Mareels IMY, Moore JB (1997) High performance control. Birkhäuser Boston
Elliott S, Sutton T (1996) Performance of feedforward and feedback systems for active control. IEEE Trans Speech Audio Process 4(3):214–223. doi:10.1109/89.496217
Kuo S, Morgan D (1999) Active noise control: a tutorial review. Proc IEEE 87(6):943–973. doi:10.1109/5.763310
Hu J, Linn J (2000) Feedforward active noise controller design in ducts without independent noise source measurements. IEEE Trans Control Syst Technol 8(3):443–455
Jacobson C, Johnson CR, Jr, McCormick D, Sethares W (2001) Stability of active noise control algorithms. IEEE Signal Process Lett 8(3):74–76. doi:10.1109/97.905944
Zeng J, de Callafon R (2006) Recursive filter estimation for feedforward noise cancellation with acoustic coupling. J Sound Vib 291(3–5):1061–1079. doi:10.1016/j.jsv.2005.07.016
Landau ID, Lozano R, M’Saad M, Karimi A (2011) Adaptive control, 2nd edn. Springer, London
Bodson M, Douglas S (1997) Adaptive algorithms for the rejection of sinusosidal disturbances with unknown frequency. Automatica 33:2213–2221
Benamara F, Kabamba P, Ulsoy A (1999) Adaptive sinusoidal disturbance rejection in linear discrete-time systems—part I: Theory. J Dyn Syst Meas Control 121:648–654
Valentinotti S (2001) Adaptive rejection of unstable disturbances: Application to a fed-batch fermentation. Thèse de doctorat, École Polytechnique Fédérale de Lausanne
Marino R, Santosuosso G, Tomei P (2003) Robust adaptive compensation of biased sinusoidal disturbances with unknown frequency. Automatica 39:1755–1761
Ding Z (2003) Global stabilization and disturbance suppression of a class of nonlinear systems with uncertain internal model. Automatica 39(3):471–479. doi:10.1016/S0005-1098(02)00251-0
Landau I, Constantinescu A, Rey D (2005) Adaptive narrow band disturbance rejection applied to an active suspension—an internal model principle approach. Automatica 41(4):563–574
Kinney C, Fang H, de Callafon R, Alma M (2011) Robust estimation and automatic controller tuning in vibration control of time varying harmonic disturbances. In: 18th IFAC World Congress, Milano, Italy, pp 5401–5406
Aranovskiy S, Freidovich LB (2013) Adaptive compensation of disturbances formed as sums of sinusoidal signals with application to an active vibration control benchmark. Eur J Control 19(4), 253–265. doi:10.1016/j.ejcon.2013.05.008. (Benchmark on adaptive regulation: rejection of unknown/time-varying multiple narrow band disturbances)
Chen X, Tomizuka M (2012) A minimum parameter adaptive approach for rejecting multiple narrow-band disturbances with application to hard disk drives. IEEE Trans Control Syst Technol 20(2):408–415. doi:10.1109/TCST.2011.2178025
Emedi Z, Karimi A (2012) Fixed-order LPV controller design for rejection of a sinusoidal disturbance with time-varying frequency. In: 2012 IEEE multi-conference on systems and control, Dubrovnik
Marino R, Santosuosso G, Tomei P (2008) Output feedback stabilization of linear systems with unknown additive output sinusoidal disturbances. Eur J Control 14(2):131–148
Landau ID, Alma M, Constantinescu A, Martinez JJ, Noë M (2011) Adaptive regulation—rejection of unknown multiple narrow band disturbances (a review on algorithms and applications). Control Eng Pract 19(10):1168–1181. doi:10.1016/j.conengprac.2011.06.005
Castellanos-Silva A, Landau ID, Dugard L, Chen X (2016) Modified direct adaptive regulation scheme applied to a benchmark problem. Eur J Control 28:69–78. doi:10.1016/j.ejcon.2015.12.006
Landau ID, Airimitoaie TB, Castellanos SA (2015) Adaptive attenuation of unknown and time-varying narrow band and broadband disturbances. Int J Adapt Control Signal Process 29(11):1367–1390
Landau ID, Airimitoaie TB, Castellanos SA, Alma M (2015) Adaptative active vibration isolation—a control perspective. MATEC web of conferences 20, 04,001. doi:10.1051/matecconf/20152004001
Alkhatib R, Golnaraghi M (2003) Active structural vibration control: a review. Shock Vib Dig 35(5):367
Fuller C, Von Flotow A (1995) Active control of sound and vibration. IEEE Control Syst 15(6):9–19
Zhou S, Shi J (2001) Active balancing and vibration control of rotating machinery: a survey. Shock Vib Dig 33(5):361–371
Preumont A, François A, Bossens F, Abu-Hanieh A (2002) Force feedback versus acceleration feedback in active vibration isolation. J Sound Vib 257(4):605–613
Martinez JJ, Alma M (2012) Improving playability of blu-ray disc drives by using adaptive suppression of repetitive disturbances. Automatica 48(4):638–644
Taheri B (2013) Real-time pathological tremor identification and suppression. Phd thesis, Southern Methodist University
Taheri B, Case D, Richer E (2014) Robust controller for tremor suppression at musculoskeletal level in human wrist. IEEE Trans Neural Syst Rehabil Eng 22(2):379–388. doi:10.1109/TNSRE.2013.2295034
Taheri B, Case D, Richer E (2015) Adaptive suppression of severe pathological tremor by torque estimation method. IEEE/ASME Trans Mechatron 20(2):717–727. doi:10.1109/TMECH.2014.2317948
Bohn C, Cortabarria A, Härtel V, Kowalczyk K (2004) Active control of engine-induced vibrations in automotive vehicles using disturbance observer gain scheduling. Control Eng Pract 12(8):1029–1039
Karkosch H, Svaricek F, Shoureshi R, Vance J (1999) Automotive applications of active vibration control. In: Proceedings of the European control conference
Li Y, Horowitz R (2001) Active suspension vibration control with dual stage actuators in hard disk drives. In: Proceedings of the American control conference, 2001, vol 4, pp 2786–2791. IEEE, New York
Hong J, Bernstein DS (1998) Bode integral constraints, collocation, and spillover in active noise and vibration control. IEEE Trans Control Syst Technol 6(1):111–120
Bodson: Call for papers: Recent advances in adaptive methods for frequency estimation with applications. Int J Adapt Control Signal Process 28(6), 562–562 (2014). doi:10.1002/acs.2486
Chen X, Tomizuka M (2015) Overview and new results in disturbance observer based adaptive vibration rejection with application to advanced manufacturing. Int J Adapt Control Signal Process 29(11):1459–1474. doi:10.1002/acs.2546
Chen B, Pin G, Ng WM, Hui SYR, Parisini T (2015) A parallel prefiltering approach for the identification of a biased sinusoidal signal: Theory and experiments. Int J Adapt Control Signal Process 29(12):1591–1608. doi:10.1002/acs.2576
Khan NA, Boashash B (2016) Multi-component instantaneous frequency estimation using locally adaptive directional time frequency distributions. Int J Adapt Control Signal Process 30(3):429–442. doi:10.1002/acs.2583
Marino R, Tomei P (2016) Adaptive notch filters are local adaptive observers. Int J Adapt Control Signal Process 30(1):128–146. doi:10.1002/acs.2582
Carnevale D, Galeani S, Sassano M, Astolfi A (2016) Robust hybrid estimation and rejection of multi-frequency signals. Int J Adapt Control Signal Process. doi:10.1002/acs.2679
Jafari S, Ioannou PA (2016) Rejection of unknown periodic disturbances for continuous-time MIMO systems with dynamic uncertainties. Int J Adapt Control Signal Process. doi:10.1002/acs.2683
Menini L, Possieri C, Tornambè A (2015) Sinusoidal disturbance rejection in chaotic planar oscillators. Int J Adapt Control Signal Process 29(12):1578–1590. doi:10.1002/acs.2564
Ushirobira R, Perruquetti W, Mboup M (2016) An algebraic continuous time parameter estimation for a sum of sinusoidal waveform signals. Int J Adapt Control Signal Process. To appear
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
Copyright information
© 2017 Springer International Publishing Switzerland
About this chapter
Cite this chapter
Landau, I.D., Airimitoaie, TB., Castellanos-Silva, A., Constantinescu, A. (2017). Introduction to Adaptive and Robust Active Vibration Control. In: Adaptive and Robust Active Vibration Control. Advances in Industrial Control. Springer, Cham. https://doi.org/10.1007/978-3-319-41450-8_1
Download citation
DOI: https://doi.org/10.1007/978-3-319-41450-8_1
Published:
Publisher Name: Springer, Cham
Print ISBN: 978-3-319-41449-2
Online ISBN: 978-3-319-41450-8
eBook Packages: EngineeringEngineering (R0)