
Abstract
DASH is a realization of the PGAS (partitioned global address space) programming model in the form of a C++ template library. It provides a multi-dimensional array abstraction which is typically used as an underlying container for stencil- and dense matrix operations. Efficiency of operations on a distributed multi-dimensional array highly depends on the distribution of its elements to processes and the communication strategy used to propagate values between them. Locality can only be improved by employing an optimal distribution that is specific to the implementation of the algorithm, run-time parameters such as node topology, and numerous additional aspects. Application developers do not know these implications which also might change in future releases of DASH. In the following, we identify fundamental properties of distribution patterns that are prevalent in existing HPC applications. We describe a classification scheme of multi-dimensional distributions based on these properties and demonstrate how distribution patterns can be optimized for locality and communication avoidance automatically and, to a great extent, at compile-time.
Access provided by Autonomous University of Puebla. Download conference paper PDF
Similar content being viewed by others


Keywords
These keywords were added by machine and not by the authors. This process is experimental and the keywords may be updated as the learning algorithm improves.
1 Introduction
For exascale systems the cost of accessing data is expected to be the dominant factor in terms of execution time as well as energy consumption [3]. To minimize data movement, applications have to consider initial placement and optimize both vertical data movement in the memory hierarchy and horizontal data movement between processing units. Programming systems for exascale must therefore shift from a compute-centric to a more data-centric focus and give application developers fine-grained control over data locality.
On an algorithmic level, many scientific applications are naturally expressed in multi-dimensional domains that arise from discretization of time and space. However, few programming systems support developers in expressing and exploiting data locality in multiple dimensions beyond the most simple one-dimensional distributions. In this paper we present a framework that enables HPC application developers to express constraints on data distribution that are suitable to exploit locality in multi-dimensional arrays.
The DASH library [10] provides numerous variants of data distribution schemes. Their implementations are encapsulated in well-defined concept definitions and are therefore semantically interchangeable. However, no single distribution scheme is suited for every usage scenario. In operations on shared multi-dimensional containers, locality can only be maintained by choosing an optimal distribution. This choice depends on:
-
the algorithm executed on the shared container, in particular its communication pattern and memory access scheme,
-
run-time parameters such as the extents of the shared container, the number of processes and their network topology,
-
numerous additional aspects such as CPU architecture and memory topology.
The responsibility to specify a data distribution that achieves high locality and communication avoidance lies with the application developers. These, however, are not aware of implementation-specific implications: a specific distribution might be balanced, but blocks might not fit into a cache line, inadvertently impairing hardware locality.
As a solution, we present a mechanism to find a concrete distribution variant among all available candidate implementations that satisfies a set of properties. In effect, programmers do not need to specify a distribution type and its configuration explicitly. They can rely on the decision of the DASH library and focus only on aspects of data distribution that are relevant in the scenario at hand.
For this, we first identify and categorize fundamental properties of distribution schemes that are prevalent in algorithms in related work and existing HPC applications. With DASH as a reference implementation, we demonstrate how optimized data distributions can then be determined automatically and, to a great extent, at compile-time.
From a software engineering perspective, we explain how our methodology follows best practices known from established C++ libraries and thus ensures that user applications are not only robust against, but even benefit from future changes in DASH.
The remainder of this paper is structured as follows: the following section introduces fundamental concepts of PGAS and locality in the context of DASH. A classification of data distribution properties is presented in Sect. 3. In Sect. 4, we show how this system of properties allows to exploit locality in DASH in different scenarios. Using the use case of SUMMA as an example, the presented methods are evaluated for performance as well as flexibility against the established implementations from Intel MKL and ScaLAPACK. Publications and tools related to this work are discussed in Sect. 6. Finally, Sect. 7 gives a conclusion and an outlook on future work where the DASH library’s pattern traits framework is extended to sparse, irregular, and hierarchical distributions.
2 Background
This section gives a brief introduction to the Partitioned Global Address Space approach considering locality and data distribution. We then present concepts in the DASH library used to express process topology, data distribution and iteration spaces. The following sections build upon these concepts and present new mechanisms to exploit locality automatically using generic programming techniques.
2.1 PGAS and Multi-dimensional Locality
Conceptually, the Partitioned Global Address Space (PGAS) paradigm unifies memory of individual, networked nodes into a virtual global memory space. In effect, PGAS languages create a shared namespace for local and remote variables. This, however, does not affect physical ownership. A single variable is only located in a specific node’s memory and local access is more efficient than remote access from other nodes. This is expected to matter more and more even within single (NUMA) nodes in the near future [3]. As locality directly affects performance and scalability, programmers need full control over data placement. Then, however, they are facing overwhelmingly complex implications of data distribution on locality.
This complexity increases exponentially with the number of data dimensions. Calculating a rectangular intersection might be manageable for up to three dimensions, but locality is hard to maintain in higher dimensions, especially for irregular distributions.
2.2 DASH Concepts
Expressing data locality in a Partitioned Global Address Space language builds upon fundamental concepts of process topology and data distribution. In the following, we describe these concepts as they are used in the context of DASH.
2.2.1 Topology: Teams and Units
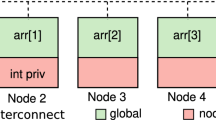
In DASH terminology, a unit refers to any logical component in a distributed memory topology that supports processing and storage. Conventional PGAS approaches offer only the differentiation between local and global data and distinguish between private, shared-local, and shared-remote memory. DASH extends this model by a more fine-grained differentiation that corresponds to hierarchical machine models as units are organized in hierarchical teams. For example, a team at the top level could group processing nodes into individual teams, each again consisting of units referencing single CPU cores.
2.2.2 Data Distribution: Patterns
Data distributions in general implement a two-level mapping:
-
1.
From index to process (node- or process mapping)
-
2.
From process to local memory offset (local order or layout)
Index sets separate the logical index space as seen by the user from physical layout in memory space. This distinction and the mapping between index domains is usually transparent to the programmer.
Process mapping can also be understood as distribution, arrangement in local memory is also referred to as layout e.g. in Chapel [5].
In DASH, data decomposition is based on index mappings provided by different implementations of the DASH Pattern concept. Listing 1 shows the instantiation of a rectangular pattern, specifying the Cartesian index domain and partitioning scheme. Patterns partition a global index set into blocks that are then mapped to units. Consequently, indices are mapped to processes indirectly in two stages: from index to block (partitioning) and from block to unit (mapping). Figure 1 illustrates a pattern’s index mapping as sequential steps in the distribution of a two-dimensional array. While the name and the illustrated example might suggest otherwise, blocks are not necessarily rectangular.

Example of partitioning, mapping, and layout in the distribution of a dense, two-dimensional array
In summary, the DASH pattern concept defines semantics in the following categories:
Layout semantics specify the arrangement of values in local memory and, in effect, their order. Indexing semantics also include index set operations like slicing and intersection but do not affect physical data distribution.
We define distribution semantics of a pattern type depending on the following set of operations:
with n-dimensional indices \(i_{G}\), \(i_{L}\) as coordinates in the global/local Cartesian element space and \(i_{GB}\), \(i_{LB}\) as coordinates in the global/local Cartesian block space. Instead of a Cartesian point, an index may also be declared as a point’s offset in linearized memory order.
Listing 1 Explicit instantiation of DASH patterns
1 // Brief notation:
2 TilePattern<2> pattern(global_extent_x, global_extent_y,
3 TILED(tilesize_x), TILED(tilesize_y));
4 // Equivalent full notation:
5 TilePattern<2, dash::default_index_t, ROW_MAJOR>
6 pattern(DistributionSpec<2>(
7 TILED(tilesize_x), TILED(tilesize_y),
8 SizeSpec<2, dash::default_size_t>(
9 global_extent_x, global_extent_y),
10 TeamSpec<1>(
11 Team::All()));
DASH containers use patterns to provide uniform notations based on view proxy types to express index domain mappings. User-defined data distribution schemes can be easily incorporated in DASH applications as containers and algorithms accept any type that implements the Pattern concept.
Listing 2 illustrates the intuitive usage of user-defined pattern types and the local and block view accessors that are part of the DASH container concept. View proxy objects use a referenced container’s pattern to map between its index domains but do not contain any elements themselves. They can be arbitrarily chained to refine an index space in consecutive steps, as in the last line of Listing 2: the expression array.local.block(1) addresses the second block in the array’s local memory space.
In effect, patterns specify local iteration order similar to the partitioning of iteration spaces e.g. in RAJA [11]. Proxy types implement all methods of their delegate container type and thus also provide begin and end iterators that specify the iteration space within the view’s mapped domain. DASH iterators provide an intuitive notation of ranges in virtual global memory that are well-defined with respect to distance and iteration order, even in multi-dimensional and irregular index domains.
Listing 2 Views on DASH containers
1 CustomPattern pattern;
2 dash::Array<double > a(size, pattern);
3 double g_first = a[0] // First value in global memory,
4 // corresponds to a.begin()
5 double l_first = a.local[0]; // First value in local memory,
6 // corresponds to a.local.begin()
7 dash::copy(a.block(0).begin(), // Copy first block in
8 a.block(0).end(), // global memory to second
9 a.local.block(1).begin()); // block in local memory
3 Classification of Pattern Properties
While terms like blocked, cyclic and block-cyclic are commonly understood, the terminology of distribution types is inconsistent in related work, or varies in semantics. Typically, distributions are restricted to specific constraints that are not applicable in the general case for convenience.
Instead of a strict taxonomy enumerating the full spectrum of all imaginable distribution semantics, a systematic description of pattern properties is more practicable to abstract semantics from concrete implementations. The classification presented in this section allows to specify distribution patterns by categorized, unordered sets of properties. It is, of course, incomplete, but can be easily extended. We identify properties that can be fulfilled by data distributions and then group these properties into orthogonal categories which correspond to the separate functional aspects of the pattern concept described in Sect. 2.2.2: partitioning, unit mapping, and memory layout. This categorization also complies with the terminology and conceptual findings in related work [16].
DASH pattern semantics are specified by a configuration of properties in these dimensions:
Details on a selection of single properties in all categories are discussed in the remainder of this section.
3.1 Partitioning Properties
Partitioning refers to the methodology used to subdivide a global index set into disjoint blocks in an arbitrary number of logical dimensions. If not specified otherwise by other constraints, indices are mapped into rectangular blocks. A partitioning is regular if it only creates blocks with identical extents and balanced if all block have identical size.
Note that with the classification, these properties are mostly independent: rectangular partitionings may produce blocks with varying extents, balanced partitionings are not necessarily rectangular, and so on. For example, partitioning a matrix into triangular blocks could satisfy the regular and balanced partitioning properties. The fine-grained nature of property definitions allows many possible combinations that form an expressive and concise vocabulary to express pattern semantics.
3.2 Mapping Properties
Well-defined mapping properties exist that have been formulated to define multipartitionings, a family of distribution schemes supporting parallelization of line sweep computations over multi-dimensional arrays.
The first and most restrictive multipartitioning has been defined based on the diagonal property [15]. In a multipartitioning, each process owns exactly one tile in each hyperplane of a partitioning so that all processors are active in every step of a line-sweep computation along any array dimension as illustrated in Fig. 2.

Combinations of mapping properties. Numbers in blocks indicate the unit rank owning the block
General multipartitionings are a more flexible variant that allows to assign more than one block to a process in a partitioned hyperplane. The generalized definition subdivides the original diagonal property into the balanced and neighbor mapping properties [7] described below. This definition is more relaxed but still preserves the benefits for line-sweep parallelization.
The constraints defined for multipartitionings are overly strict for some algorithms and can be further relaxed to a subset of its properties. For example, a pipelined optimization of the SUMMA algorithm requires a diagonal shift mapping [14, 18] that satisfies the diagonal property but is not required to be balanced. Therefore, the diagonal property in our classification does not imply a balanced mapping, deviating from its original definition.
3.3 Layout Properties
Layout properties describe how values are arranged in a unit’s physical memory and, consequently, their order of traversal. Perhaps the most crucial property is storage order which is either row- or column-major. If not specified, DASH assumes row-major order as known from C. The list of properties can also be extended to give hints to allocation routines on the physical memory topology of units such as NUMA or CUDA.
While patterns assign indices to units in logical blocks, they do not necessarily preserve the block structure in local index sets. After process mapping, a pattern’s layout scheme may arrange indices mapped to a unit in an arbitrary way in physical memory. In canonical layouts, the local storage order corresponds to the logical global iteration order. Blocked layouts preserve the block structure locally such that values within a block are contiguous in memory, but in arbitrary order. The additional linear property also preserves the logical linearized order of elements within single blocks. For example, Morton order memory layout as shown in Fig. 3 satisfies the blocked property, as elements within a block are contiguous in memory, but does not grant the linear property.

Morton order memory layout of block elements
3.4 Global Properties
The Global category is usually only needed to give hints on characteristics of the distributed value domain such as the sparse property to indicate the distribution of sparse data.
It also contains properties that emerge from a combination of the independent partitioning and layout properties and cannot be derived from either category separately. The global balanced distribution property, for example, guarantees the same number of local elements at every unit. This is trivially fulfilled for balanced partitioning and balanced mapping where the same number of blocks b of identical size s is mapped to every unit. However, it could also be achieved in a combination of unbalanced partitioning and unbalanced mapping, e.g. when assigning b blocks of size s and b∕2 blocks of size 2s.
4 Exploiting Locality with Pattern Traits
The classification system presented in the last section allows to describe distribution pattern semantics using properties instead of a taxonomy of types that are associated with concrete implementations. In the following, we introduce pattern traits, a collection of mechanisms in DASH that utilize distribution properties to exploit data locality automatically.
As a technical prerequisite for these mechanisms, every pattern type is annotated with tag type definitions that declare which properties are satisfied by its implementation. This enables meta-programming based on the patterns’ distribution properties as type definitions are evaluated at compile-time. Using tags to annotate type invariants is a common method in generic C++ programming and prevalent in the STL and the Boost library.Footnote 1
Listing 3 Property tags in a pattern type definition
1 template <dim_t NDim, ...>
2 class ThePattern {
3 public :
4 typedef mapping_properties<
5 mapping_tag::diagonal,
6 mapping_tag::cyclic >
7 mapping_tags;
8 ...
9 };
4.1 Deducing Distribution Patterns from Constraints
In a common use case, programmers intend to allocate data in distributed global memory with the use for a specific algorithm in mind. They would then have to decide for a specific distribution type, carefully evaluating all available options for optimal data locality in the algorithm’s memory access pattern.
To alleviate this process, DASH allows to automatically create a concrete pattern instance that satisfies a set of constraints. The function make_pattern returns a pattern instance from a given set of properties and run-time parameters. The actual type of the returned pattern instance is resolved at compile-time and never explicitly appears in client code by relying on automatic type deduction.
Listing 4 Deduction of an optimal distribution
1 static const dash::dim_t NumDataDim = 2;
2 static const dash::dim_t NumTeamDim = 2;
3 // Topology of processes, here: 16x8 process grid
4 TeamSpec<NumTeamDim> teamspec(16, 8);
5 // Cartesian extents of container:
6 SizeSpec<NumDataDim> sizespec(extent_x, extent_y);
7 // Create instance of pattern type deduced from
8 // constraints at compile-time:
9 auto pattern =
10 dash::make_pattern<
11 partitioning_properties<
12 partitioning_tag::balanced >,
13 mapping_properties<
14 mapping_tag::balanced, mapping_tag::diagonal >,
15 layout_properties<
16 layout_tag::blocked >
17 >(sizespec, teamspec);
To achieve compile-time deduction of its return type, make_pattern employs the Generic Abstract Factory design pattern [2]. Different from an Abstract Factory that returns a polymorphic object specializing a known base type, a Generic Abstract Factory returns an arbitrary type, giving more flexibility and no longer requiring inheritance at the same time.
Pattern constraints are passed as template parameters grouped by property categories as shown in Listing 4. Data extents and unit topology are passed as run-time arguments. Their respective dimensionality (NumDataDim, NumTeamDim), however, can be deduced from the argument types at compile-time. Figure 4 illustrates the logical model of this process involving two stages: a type generator that resolves a pattern type from given constraints and argument types at compile-time and an object generator that instantiates the resolved type depending on constraints and run-time parameters.

Type deduction and pattern instantiation in dash::make_pattern
Every property that is not specified as a constraint is a degree of freedom in type selection. Evaluations of the GUPS benchmark show that arithmetic for dereferencing global indices is a significant performance bottleneck apart from locality effects. Therefore, when more than one pattern type satisfies the constraints, the implementation with the least complex index calculation is preferred.
The automatic deduction also is designed to prevent inefficient configurations. For example, pattern types that pre-generate block coordinates to simplify index calculation are inefficient and memory-intensive for a large number of blocks. They are therefore disregarded if the blocking factor in any dimension is small.
4.2 Deducing Distribution Patterns for a Specific Use Case
With the ability to create distribution patterns from constraints, developers still have to know which constraints to choose for a specific algorithm. Therefore, we offer shorthands for constraints of every algorithm provided in DASH that can be passed to make_pattern instead of single property constraints.
Listing 5 Deduction of a matching distribution pattern for a given use-case
1 dash::TeamSpec<2> teamspec(16, 8);
2 dash::SizeSpec<2> sizespec(1024, 1024);
3 // Create pattern instance optimized for SUMMA:
4 auto pattern = dash::make_pattern<
5 dash::summa_pattern_traits
6 >(sizepec, teamspec);
7 // Create matrix instances using the pattern:
8 dash::Matrix<2, int > matrix_a(sizespec, pattern);
9 dash::Matrix<2, int > matrix_b(sizespec, pattern);
10 ldots
11 auto matrix_c = dash::summa(matrix_a, matrix_b)
4.3 Checking Distribution Constraints
An implementer of an algorithm on shared containers might want to ensure that their distribution fits the algorithm’s communication strategy and memory access scheme.
The traits type pattern_constraints allows querying constraint attributes of a concrete pattern type at compile-time. If the pattern type satisfies all requested properties, the attribute satisfied is expanded to true. Listing 6 shows its usage in a static assertion that would yield a compilation error if the object pattern implements an invalid distribution scheme.
Listing 6 Checking distribution constraints at compile-time and run-time
1 // Compile-time constraints check:
2 static_assert(
3 dash::pattern_contraints<
4 decltype(pattern),
5 partitioning_properties< ... >,
6 mapping_properties< ... >,
7 layout_properties< ... >
8 >::satisfied::value
9 );
10 // Run-time constraints check:
11 if (dash::check_pattern_contraints<
12 partitioning_properties< ... >,
13 mapping_properties< ... >,
14 indexing_properties< ... >
15 >(pattern)) {
16 // Object ’pattern’ satisfies constraints
17 }
Some constraints depend on parameters that are unknown at compile-time, such as data extents or unit topology in the current team.
The function check_pattern_constraints allows checking a given pattern object against a set of constraints at run-time. Apart from error handling, it can also be used to implement alternative paths for different distribution schemes.
4.4 Deducing Suitable Algorithm Variants
When combining different applications in a work flow or working with legacy code, container data might be preallocated. As any redistribution is usually expensive, the data distribution scheme is invariant and a matching algorithm variant is to be found.
We previously explained how to resolve a distribution scheme that is the best match for a known specific algorithm implementation. Pattern traits and generic programming techniques available in C++11 also allow to solve the inverse problem: finding an algorithm variant that is suited for a given distribution. For this, DASH provides adapter functions that switch between an algorithm’s implementation variants depending on the distribution type of its arguments. In Listing 7, three matrices are declared using an instance of dash::TilePattern that corresponds to the known distribution of their preallocated data. In compilation, dash::multiply expands to an implementation of matrix–matrix multiplication that best matches the distribution properties of its arguments, like dash::summa in this case.
Listing 7 Deduction of an algorithm variant for a given distribution
1 typedef dash::TilePattern<2, ROW_MAJOR> TiledPattern;
2 typedef dash::Matrix<2, int , TiledPattern> TiledMatrix;
3 TiledPattern pattern(global_extent_x, global_extent_y,
4 TILE(tilesize_x), TILE(tilesize_y));
5 TiledMatrix At(pattern);
6 TiledMatrix Bt(pattern);
7 TiledMatrix Ct(pattern);
8 ...
9 // Use adapter to resolve algorithm suited for TiledPattern:
10 dash::multiply(At, Bt, Ct); // --> dash::summa(At, Bt, Ct);
5 Performance Evaluation
We choose dense matrix–matrix multiplication (DGEMM) as a use case for evaluation as it represents a concise example that allows to demonstrate how slight changes in domain decomposition drastically affect performance even in highly optimized implementations.
In principle, the matrix–matrix multiplication implemented in DASH realizes a conventional blocked matrix multiplication similar to a variant of the SUMMA algorithm presented in [14]. For the calculation C = A × B, matrices A, B and C are distributed using a blocked partitioning. Following the owner computes principle, every unit then computes the multiplication result
for all sub-matrices in C that are local to the unit.
Figure 5 illustrates the first two multiplication steps for a square matrix for simplicity, but the SUMMA algorithm also allows rectangular matrices and unbalanced partitioning.

Domain decomposition and first two block matrix multiplications in the SUMMA implementation. Numbers in blocks indicate the unit mapped to the block
We compare strong scaling capabilities on a single processing node against DGEMM provided by multi-threaded Intel MKL and PLASMA [1]. Performance of distributed matrix multiplication is evaluated against ScaLAPACK [8] for an increasing number of processing nodes.
Ideal tile sizes for PLASMA and ScaLAPACK had to be obtained in a large series of tests for every variation of number of cores and matrix size. As PLASMA does not optimize for NUMA systems, we also tried different configurations of numactl as suggested in the official documentation of PLASMA.
For the DASH implementation, data distribution is resolved automatically using the make_pattern mechanism as described in Sect. 4.2.
5.1 Eperimental Setup
To substantiate the transferability of the presented results, we execute benchmarks on the supercomputing systems SuperMUC and Cori which differ in hardware specifications and application environments.
SuperMUC phase 2Footnote 2 incorporates an Infiniband fat tree topology interconnect with 28 cores per processing node. We evaluated performance for both Intel MPI and IBM MPI.
Cori phase 1Footnote 3 is a Cray system with 32 cores per node in an Aries dragonfly topology interconnect. As an installation of PLASMA is not available, we evaluate performance of DASH and Intel MKL.
5.2 Results
We only consider the best results from MKL, PLASMA and ScaLAPACK to provide a fair comparison to the best of our abilities.
In summary, the DASH implementation consistently outperformed the tested variants of DGEMM and PDGEMM on distributed and shared memory scenarios in all configurations (Fig. 6, 7, 8).

Strong scaling of matrix multiplication on single node on SuperMUC phase 2, Intel MPI and IBM MPI, with 4 to 28 cores for increasing matrix size

Strong scaling of matrix multiplication on single node on Cori phase 1, Cray MPICH, with 4 to 32 cores for increasing matrix size

Strong scaling of dash::summa and PDGEMM (ScaLAPACK) on SuperMUC phase 2 for IBM MPI and Intel MPI for matrix size 57344 × 57344
More important than performance in single scenarios, overall analysis of results in single-node scenarios confirms that DASH in general achieved predictable scalability using automatic data distributions. This is most evident when comparing results on Cori presented in Fig. 7: the DASH implementation maintained consistent scalability while performance of Intel MKL dropped when the number of processes was not a power of two, a good example of a system-dependent implication that is commonly unknown to programmers.
6 Related Work
Various aspects of data decomposition have been examined in related work that influenced the design of pattern traits in DASH.
The Kokkos framework [9] is specifically designed for portable multi-dimensional locality. It implements compile-time deduction of data layout depending on memory architecture and also specifies distribution traits roughly resembling some of the property categories introduced in this work. However, Kokkos targets intra-node locality focusing on CUDA- and OpenMP backends and does not define concepts for process mapping. It is therefore not applicable to the PGAS language model where explicit distinction between local and remote ownership is required.
UPC++ implements a PGAS language model and, similar to the array concept in DASH, offers local views for distributed arrays for rectangular index domains [12]. However, UPC++ does not provide a general view concept and no abstraction of distribution properties as described in this work.
Chapel’s Domain Maps is an elegant framework that allows to specify and incorporate user-defined mappings [5] and also supports irregular domains. The fundamental concepts of domain decomposition in DASH are comparable to DMaps in Chapel with dense and strided regions like previously defined in ZPL [6]. Chapel does not provide automatic deduction of distribution schemes, however, and no classification of distribution properties is defined.
Finally, the benefits of hierarchical data decomposition are investigated in recent research such as TiDA, which employs hierarchical tiling as a general abstraction for data locality [17]. The Hitmap library achieves automatic deduction of data decomposition for hierarchical, regular tiles [4] at compile-time.
7 Conclusion and Future Work
We constructed a general categorization of distribution schemes based on well-defined properties. In a broad spectrum of different real-world scenarios, we then discussed how mechanisms in DASH utilize this property system to exploit data locality automatically.
In this, we demonstrated the expressiveness of generic programming techniques in modern C++ and their benefits for constrained optimization.
Automatic deduction greatly simplifies the incorporation of new pattern types such that new distribution schemes can be employed in experiments with minimal effort. In addition, a system of well-defined properties forms a concise and precise vocabulary to express semantics of data distribution, significantly improving testability of data placement.
We will continue our work on flexible data layout mappings and explore concepts to further support hierarchical locality. We are presently in the process of separating the functional aspects of DASH patterns (partitioning, mapping and layout) into separate policy types to simplify pattern type generators. In addition, the pattern traits framework will be extended by soft constraints to express preferable but non-mandatory properties.
The next steps will be to implement various irregular and sparse distributions that can be easily combined with view specifiers in DASH to support the existing unified sparse matrix storage format provided by SELL-C-σ [13]. We also intend to incorporate hierarchical tiling schemes as proposed in TiDA [17]. The next release of DASH including these features will be available in the second quarter of 2016.
References
Agullo, E., Demmel, J., Dongarra, J., Hadri, B., Kurzak, J., Langou, J., Ltaief, H., Luszczek, P., Tomov, S.: Numerical linear algebra on emerging architectures: The plasma and magma projects. J. Phys.: Conf. Ser. 180, 012037 (2009). IOP Publishing
Alexandrescu, A.: Modern C++ Design: Generic Programming and Design Patterns Applied. Addison-Wesley, Boston (2001)
Ang, J.A., Barrett, R.F., Benner, R.E., Burke, D., Chan, C., Cook, J., Donofrio, D., Hammond, S.D., Hemmert, K.S., Kelly, S.M., Le, H., Leung, V.J., Resnick, D.R., Rodrigues, A.F., Shalf, J., Stark, D., Unat, D., Wright, N.J.: Abstract machine models and proxy architectures for exascale computing. In: Proceedings of the 1st International Workshop on Hardware-Software Co-design for High Performance Computing (Co-HPC ’14), pp. 25–32. IEEE Press, Piscataway (2014)
de Blas Cartón, C., Gonzalez-Escribano, A., Llanos, D.R.: Effortless and efficient distributed data-partitioning in linear algebra. In: 2010 12th IEEE International Conference on High Performance Computing and Communications (HPCC), pp. 89–97. IEEE (2010)
Chamberlain, B.L., Choi, S.E., Deitz, S.J., Iten, D., Litvinov, V.: Authoring user-defined domain maps in Chapel. In: CUG 2011 (2011)
Chamberlain, B.L., Choi, S.E., Lewis, E.C., Lin, C., Snyder, L., Weathersby, W.D.: ZPL: A machine independent programming language for parallel computers. IEEE Trans. Softw. Eng. 26 (3), 197–211 (2000)
Chavarría-Miranda, D.G., Darte, A., Fowler, R., Mellor-Crummey, J.M.: Generalized multipartitioning for multi-dimensional arrays. In: Proceedings of the 16th International Parallel and Distributed Processing Symposium. p. 164. IEEE Computer Society (2002)
Choi, J., Demmel, J., Dhillon, I., Dongarra, J., Ostrouchov, S., Petitet, A., Stanley, K., Walker, D., Whaley, R.C.: ScaLAPACK: A portable linear algebra library for distributed memory computers – Design issues and performance. In: Applied Parallel Computing Computations in Physics, Chemistry and Engineering Science, pp. 95–106. Springer (1995)
Edwards, H.C., Sunderland, D., Porter, V., Amsler, C., Mish, S.: Manycore performance-portability: Kokkos multidimensional array library. Sci. Program. 20 (2), 89–114 (2012)
Fürlinger, K., Glass, C., Knüpfer, A., Tao, J., Hünich, D., Idrees, K., Maiterth, M., Mhedeb, Y., Zhou, H.: DASH: Data structures and algorithms with support for hierarchical locality. In: Euro-Par 2014 Workshops (Porto, Portugal). Lecture Notes in Computer Science, pp. 542–552. Springer (2014)
Hornung, R., Keasler, J.: The RAJA portability layer: overview and status. Tech. rep., Lawrence Livermore National Laboratory (LLNL), Livermore (2014)
Kamil, A., Zheng, Y., Yelick, K.: A local-view array library for partitioned global address space C++ programs. In: Proceedings of ACM SIGPLAN International Workshop on Libraries, Languages, and Compilers for Array Programming, p. 26. ACM (2014)
Kreutzer, M., Hager, G., Wellein, G., Fehske, H., Bishop, A.R.: A unified sparse matrix data format for efficient general sparse matrix-vector multiplication on modern processors with wide SIMD units. SIAM J. Sci. Comput. 36 (5), C401–C423 (2014)
Krishnan, M., Nieplocha, J.: SRUMMA: a matrix multiplication algorithm suitable for clusters and scalable shared memory systems. In: Proceedings of 18th International Parallel and Distributed Processing Symposium 2004, p. 70. IEEE (2004)
Naik, N.H., Naik, V.K., Nicoules, M.: Parallelization of a class of implicit finite difference schemes in computational fluid dynamics. Int. J. High Speed Comput. 5 (01), 1–50 (1993)
Tate, A., Kamil, A., Dubey, A., Größlinger, A., Chamberlain, B., Goglin, B., Edwards, C., Newburn, C.J., Padua, D., Unat, D., et al.: Programming abstractions for data locality. Research report, PADAL Workshop 2014, April 28–29, Swiss National Supercomputing Center (CSCS), Lugano (Nov 2014)
Unat, D., Chan, C., Zhang, W., Bell, J., Shalf, J.: Tiling as a durable abstraction for parallelism and data locality. In: Workshop on Domain-Specific Languages and High-Level Frameworks for High Performance Computing (2013)
Van De Geijn, R.A., Watts, J.: SUMMA: Scalable universal matrix multiplication algorithm. Concurr. Comput. 9 (4), 255–274 (1997)
Acknowledgements
We gratefully acknowledge funding by the German Research Foundation (DFG) through the German Priority Program 1648 Software for Exascale Computing (SPPEXA).
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2016 Springer International Publishing Switzerland
About this paper
Cite this paper
Fuchs, T., Fürlinger, K. (2016). Expressing and Exploiting Multi-Dimensional Locality in DASH. In: Bungartz, HJ., Neumann, P., Nagel, W. (eds) Software for Exascale Computing - SPPEXA 2013-2015. Lecture Notes in Computational Science and Engineering, vol 113. Springer, Cham. https://doi.org/10.1007/978-3-319-40528-5_15
Download citation
DOI: https://doi.org/10.1007/978-3-319-40528-5_15
Published:
Publisher Name: Springer, Cham
Print ISBN: 978-3-319-40526-1
Online ISBN: 978-3-319-40528-5
eBook Packages: Mathematics and StatisticsMathematics and Statistics (R0)