
Abstract
Vehicle stability is a widely studied topic today. It is crucial that we develop a better understanding of one of the main problems of vehicular accident rate problems throughout the world: the rollover accident. The main goal for researchers is to determine a way to predict vehicle behaviour under a variety of circumstances. Davies method is a mathematical tool that allows the static and kinematic analysis of any kind of mechanisms, as well as we can find in vehicle suspensions. This method uses the Graph theory that enables kinematic chain representation by means of a graph for later analysis. In this paper we present the vehicle stability kinematic analysis using Graph theory, Screw theory and the Davies method.
Access provided by CONRICYT-eBooks. Download chapter PDF
Similar content being viewed by others

Keywords
1 Introduction
All vehicles are subjected to high inertial forces when performing evasive maneuvers and turns. These forces directly influence vehicle stability, and, when a limit is reached, they may cause rollover. Rollover can be defined as any maneuver in which a vehicle rotates 90° or more around its longitudinal axis, and its side touches the ground.
The majority of existing lateral stability studies are planar, i.e. two-dimensional [1–3], considering that the vehicles have two contact points to the road when making a turn (the inner and outer tire on the turn). However, vehicles in general have at least four contact points that the authors believe have a significant influence on vehicle stability.
Three-dimensional vehicle analyses offer a new rollover insight, and, as consequence, an increase in road safety.
Davies’ method, which is largely based on Graph theory, has proved to be very helpful in parallel robot kinestatic analysis, serial robots and vehicle mechanisms [4–7].
Our investigation focuses on the three-dimensional vehicle characteristics and the forces that influence its stability. We use Davies’ method to describe the forces acting over the vehicle that can have influence on vehicle stability.
2 Static Analysis Tools
Static mechanism analyses can be made with three concepts: Screw theory, Graph theory and Davies’ method [6–10]. These theories are explained in this section.
2.1 Screw Theory
This theory enables the mechanism to take an instantaneous position of representation in coordinate systems (successive screw displacement method) and the force and moment representation (wrench), replacing the traditional vector representation, as indicated below.
2.1.1 Method of Successive Screw Displacements
The screw displacement of a rigid body is represented by a rotation (θ) around an axis and a translation (d) along the same axis (screw axis—s) [4, 6, 10].
The bodies’ instantaneous position (p 2) after screw displacement is given by the Eq. (1):
where (p 1 ) is the reference position matrix and A 4 × 4 is the transformation matrix, which includes the rotation matrix, and the translation vector.
2.1.2 Wrench—Forces and Moments
In the static analysis, all mechanism forces and moments are represented by wrenches ($ A), as shown by Eq. (2) [8, 11],
where F i is the force applied on joint i and M i is the moment applied on joint i, s i is the wrench i orientation vector, and s oi = [s oix s oiy s oiz ]T is the instantaneous position vector of the joints and the center of gravity, related to the mechanism’s inertial reference point. In a more compact form, the wrench can be represented by Eq. (3)
where \(\hat{\$ }^{A}\) is the normalized wrench and Ψ its magnitude.
2.2 Graph Theory
Kinematic chains and mechanism are comprised of links and joints, which can be represented in a more abstract approach by graphs, where the vertices correspond to the links and the edges correspond to the joints [12].
Figure 1 illustrates the kinematic structure and the graph representation of a four-bar mechanism which contains four revolute joints “R” identified by the letters a, b, c and d, and four links identified by the numbers 1, 2, 3 and 4.

Four-bar mechanism and the corresponding direct coupling graph
The direct coupling graph can be represented by the incidence matrix [I], as indicated in Eq. (4) [11, 12].
The incidence matrix provides the mechanism cut-set matrix [Q] [11], Eq. (5), where each line represents a cut graph and the columns represent the mechanism joints. In addition, this matrix allows us to define three graph branches (edges a, b and c—identity matrix) and a chord (edge d), as shown in Fig. 2a.

a Direct coupling graph with branch and chord. b Direct coupling graph expanded. c Cut-set graph
For planar mechanism, revolute joint “R” allows a rotation and constrains two translations [12]. Figure 2b shows the direct coupling graph expanded with the constraints of each joint. Additionally, the external forces in the mechanism are also included: input torque (joint a) and output torque (joint d).
2.3 Davies Method for Statics
The Kirchhoff laws for electric circuits were adapted by Davies [13] to be used on mechanical systems.
Adapting the Kirchhoff-Davies cut-set law, it was possible to establish a relationship between actions belonging to the same partition or node, which contributes to the static analysis. Davies states that the wrench algebraic sums belonging to the same partition or cut is zero, which is the Cut Law, as shown in Fig. 2c.
In the following sections, we make a classic vehicle stability analysis of a model in two dimensions; subsequently, we make a vehicle stability analysis of a new three-dimensional model using the proposed method.
3 Two-Dimensional Model of Vehicle Stability
Vehicle lateral stability can be evaluated through the Static Stability Factor (SSF). This factor is the maximum lateral acceleration—a y (expressed in terms of gravity acceleration—g) in a quasi-static situation allowed before one or more of the tires lose contact with the ground [1, 2, 14].
This coefficient estimation supposes a two-dimensional completely rigid vehicle supported by two tires, as presented in Fig. 3. During cornering, the lateral tire forces on the ground level (not shown) counterbalance the lateral inertial force acting on the vehicle gravity center, resulting in a roll moment. Considering the moments about the A point (Fig. 3), and at the rollover threshold condition, the normal load, F z2 reaches zero, then, the SSF factor can be calculated as shown in Eq. (6):

Vehicle geometric model
4 Three-Dimensional Model of Vehicle Stability
Vehicle rollover is a three-dimensional phenomenon; affected by several vehicle characteristics, such as suspension, tires, chassis, gravity center height, vehicle track width, etc. The development and analysis of three-dimensional models enable a better understanding and interpretation of the rollover phenomenon, and allow the SSF factor estimation closer to reality. In addition, this analysis enables us to determine different vehicle characteristics influences on the rollover and a better understanding of the vehicle lateral load transfer.
With this goal, and applying the proposed method, a vehicle model making a turn is developed and analyzed.
4.1 Kinematic Chain
The model considers a semi-rigid vehicle supported by four tires. The vehicle has independent movement of the front and the rear axle. At the start point, the vehicle has a planar constant curvilinear trajectory, starting from standstill with the velocity increasing by a constant acceleration, until reaching rollover threshold, as presented in Fig. 4a. First and fourth tires are named as outer tires; and second and third tires as inner tires in this curvilinear trajectory. The contact between the tire and the road presents three constraints to movement, as shown in Fig. 4b, [15, 16].

a Vehicle model in a curvilinear trajectory. b Movement constraints in the tire-road contact
F xi is the traction or brake force, F yi is the lateral force and F zi is the normal force. However at rollover threshold, tires 1 and 4 receive greater normal force than tires 2 and 3, and then they are not prone to slide laterally. We consider that tires 1 and 4 allow only vehicle rotation along the x-axis. Therefore, we model the tire contact with the road as pure revolute joint “R” along the x-axis. However, tires 2 and 3 have lateral deformation and may slide laterally, producing a track width change of their respective axles. For this reason, we model the tire contacts 2 and 3 as prismatic joints “P”. A three-dimensional vehicle model is presented in Fig. 5a.

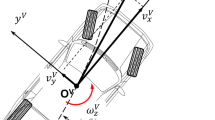
The three-dimensional kinematic chain model and the mechanism position variables
4.2 Mechanism Position Kinematics
The mechanism’s kinematic model uses the successive screws method [9], shown in Sect. 2.1.1. Figure 5b and Table 1 present the screw parameters of the mechanism. Equation (1) enables us to determine the mechanism displacement and the instantaneous position vector s oi = [s oix s oiy s oiz ]T of the joints and gravity center, as shown in Table 2.
where t is the vehicle track, L is wheel base, a 1 is distance between the front axle and the vehicle CG, h is the gravity center height, θ 1,4 are the rotation angles of the revolute joints 1 and 4 respectively.
4.3 Direct Coupling Graph
As indicated in Sect. 2.2, a mechanism can be represented by a graph. Figure 6a shows the direct coupling graph that represents the mechanism shown in Fig. 5a. The graph has two vertices (A—road and B—vehicle’s body) and four edges representing the tire support (revolute joints 1 and 4 represent the outer tire supports, prismatic joints 2 and 3 are the inner tire supports, and the external forces (weight (W) and inertial force (ma y ))).

a Direct coupling graph. b Direct coupling graph with branches and chord
The direct coupling graph can be represented by the incidence matrix [I], as indicated in Eq. (7) [11]:
The incidence matrix provides the mechanism cut-set matrix [Q] [11], Eq. (8), where each line represents a cut graph and the columns represent the mechanism joints. In addition, this matrix allows us to define a branch graph (edge 1—identity matrix) and five chords (edges 2, 3, 4 and the external forces) as shown in Fig. 6b.
4.4 The Mechanism Statics
Considering a static analysis in three-dimensional space [12]:
-
(a)
A revolute joint “R” allows a rotation and constrains two rotations and three translations. In the 1st and 4th joints, rotation around the x-axis is permitted, while rotations on the y and z-axis (M y and M z ) and all three axes F xi , F yi and F zi translations, are constrained.
-
(b)
A prismatic joint “P” allows two translations and three rotations, while constraining a translation. The translation on the z-axis (F zi ) is constrained for the 2nd and 3rd tires (joints).
All the constraints are represented as edges. This allows a cut-set graph amplification (Fig. 6b) and a cut-set matrix Eq. (8). Additionally, the mechanism external forces are also included, such as the vehicle weight (W) and the inertial force acting on the mechanism (ma y ).
Figure 7 presents the cut-set action graph, and Eq. (9) presents the expanded cut-set matrix, where each line represents a cut graph, and the columns represent the joint constraints and the external forces present on the mechanism.

Cut-set action graph
The corresponding wrenches of each joint and external forces are defined according to Eq. (2), and Appendix A parameters.
All the mechanism wrenches compose the action matrix [A d ] presented by Eq. (10).
According to Eq. (3), the wrench can be represented by a normalized wrench and a magnitude, therefore, from the Eq. (10) is obtained the unit action matrix [Â d ] and the magnitude action vector [Ψ], as presented by Eq. (11).
4.5 Equation System Solution
Using the Cut Law [13], the algebraic sum of the normalized wrenches Eq. (11) that belong to the same cut (Fig. 7 and Eq. (9)) must be equal to zero.
Therefore, from Eqs. (9 and 11), the equation systems for the mechanism statics are defined, as shown in Eq. (12) (Appendix B):
where [Â n ] is the network unit action matrix, and [Ψ] is the action vector of the magnitudes of the mechanism. From the Eq. (12) system, it is necessary to identify the set of primary variables [Ψ p ] (known variables), among the variables of Ψ. Once identified, the system is divided in two sets, as shown by Eq. (13),
where [Ψ p ] is the vector of primary variables (known variables), [Ψ s ] is the vector of secondary variables (unknown variables) (Eq. (14)), [Â np ] are the columns corresponding to the primary variables and [Â ns ] are the columns corresponding to the secondary variables.
Solving the system in Eq. (13), provides
from which, the solution of the secondary variables [Ψ s ] are expressed as a function of the primary variables [Ψ p ].
5 Result Analysis
On the sixth row of Appendix B of the equation systems, we obtain the following equation, which relates the vehicle weight (W = mg), the inertial force acting on the mechanism (ma y ) and inner tire normal forces in the turn (F z2 and F z3).
where h is the gravity center height, t is the vehicle track, m is the mass of vehicle, and a y is the lateral acceleration measured on the vehicle’s gravity center.
According to the static redundancy problem known as a “Four-legged Table” [17], a plane is defined by three points in space, and by consequence, a four-legged table has support plane multiplicities. This is why, when one leg loses contact with the ground, the table is supported by the other three.
Applying this theory in vehicle stability, and considering the chassis flexibility, suspension and tires stiffness; when a vehicle makes a turn, it is submitted to an increasing lateral load till it reaches the rollover threshold. During the maneuver, the rear inner tire (3) loses its contact to the ground. For this condition (F z3 = 0), and back to Eq. (16) one can get the static stability factor for a rigid vehicle as shown by Eq. (17):
This important theory is proved and observed in dynamic rollover tests, where it is possible to observe that the rear inner tire loses contact with the ground.
This information demonstrates that the SSF 3D factor of a vehicle Eq. (17) is in general inferior to the SSF 2D factor of a vehicle Eq. (6), because the second equation term is positive and lower than one.
It is possible to obtain a better vehicle stability representation and the SSF factor value attainments closer to the reality by means of Eq. (17).
In addition, in Eq. (17) it is shown that the SSF factor depends on the vehicle’s weight and the normal force on the inner front tire F z2 as well.
6 Conclusions
This work has allowed us to demonstrate the Graph theory and Davies method versatilities in the mechanism analysis, achieving good results.
When the vehicle length is considered, the SSF factor becomes smaller, and this is a real problem. If we use the SSF 2D factor as an important feature to characterize the vehicle stability, we neglect the longitudinal effects. This means that the gravity center longitudinal position (a 1 ) and the LLT A coefficient have important roles on the calculation of the SSF factor of the vehicle, and not only track (t) and gravity center height (h).
The theory about vehicle support points is possible due to different vehicle characteristics, such as suspension and tire stiffness, and chassis flexibility. This important analysis allows development of more complex models, in different types of vehicles, allowing better rollover phenomenon representation.
The SSF factor decrease is important, as it allows us to determine new road speed limits, which contributes to road safety and decreases vehicle stability related to accidents, which are very high nowadays.
References
Gillespie, T.D.: Fundamentals of vehicle dynamics. In: SAE International, 7th ed., ISBN1560911999 (1992)
Hac, A.: Rollover stability index including effects of suspension design. In: SAE International, SAE 2002 World Congress. Detroit, March 4-7 (2002)
Winkler, C.: Rollover of heavy commercial vehicles. In: UMTRI Research Review. The University of Michigan Transportation Research Institute, vol. 31, issue no. 4, pp. 1–20 (2000)
Lee, U.: A study on a method for predicting the vehicle controllability and stability using the screw axis theory. Ph.D. thesis. Hanyang University. Seoul, South Korea (2001)
Bidaud, P., Benamar, F. Poulain, T.: Kineto-static Analysis of an Articulated Six-wheel Rover. Climbing and Walking Robots, pp. 475–484. Springer Link (2006)
Erthal, J.: Modelo Cinestático para Análise de Rolagem em Veículos. Ph.D. These. Federal University of Santa Catarina. Florianópolis, Brazil (2010)
Mejia, L., Simas, H., Martins, D.: Force Capability Maximization of a 3RRR Symmetric Parallel Manipulator by Topology Optimization. 22nd International Congress of Mechanical Engineering (COBEM 2013), November 3–7, Ribeirão Preto, SP, Brazil (2013)
Davies, T. H.: The 1887 committee meets again. Subject: freedom and constraint. In: Ball 2000 Conference. Cambridge: Cambridge University Press, 56 (2000)
Tsai, L.-W.: Robot Analysis: the Mechanics of Serial and Parallel Manipulators. Wiley, New York. ISBN 0-471-32593-7 (1999)
Cazangi, H. R.: Aplicação do Método de Davies para Análise Cinemática e Estática de Mecanismos com Múltiplos Graus de Liberdade. Master’s thesis. Federal University of Santa Catarina. Florianópolis, Brazil (2008)
Davies, T.H.: Coupling, coupling networks and their graphs. Mech. Mach. Theory 30(7), 1001–1012 (1995)
Tsai, L.-W.: Mechanism Design: Enumeration of Kinematic Structures According to Function. London, CRC Press. ISBN 0849309018 (2001)
Davies, T.H.: Kirchhoff’s circulation law applied to multi-loop kinematic chains. Mech. Mach. Theory 16(3), 171–183 (1981)
Rill, G.: Road Vehicle Dynamics: Fundamentals and Modeling. CRC Press, ISBN 978-1-4398-3898-3 (2011)
Jazar, R.: Vehicle Dynamics: Theory and Application. 2nd edn. Springer, ISBN 978-1-4614-8544-5 (2014)
Pacejka, H.: Tire and Vehicle Dynamics. Published by Elsevier Ltd, 3rd ed. ISBN 9780080970165 (1995)
Heyman, J.: Basic Structural Theory. Cambridge: Cambridge University Press, 1st edn., ISBN-13 978-0-511-39692-2 (2008)
Acknowledgments
This research was supported by the Brazilian governmental agencies Coordenação de Aperfeiçoamento de Pessoal de Nível Superior (CAPES) and Conselho Nacional de Desenvolvimento Científico e Tecnológico (CNPq).
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Appendices
Appendix A. Wrench Parameters of the Mechanism
Constraints and forces | s i | \( s_{0i} \) | ||
|---|---|---|---|---|
F x1 | 1 0 0 | 0 | 0 | 0 |
F y1 | 0 1 0 | 0 | 0 | 0 |
F z1 | 0 0 1 | 0 | 0 | 0 |
M y1 | 0 1 0 | 0 | 0 | 0 |
M z1 | 0 0 1 | 0 | 0 | 0 |
F z2 | 0 0 1 | 0 | t cos θ 1 | t sin θ 1 |
F z3 | 0 0 1 | −L | t cos θ 4 | t sin θ 4 |
F x4 | 1 0 0 | −L | 0 | 0 |
F y4 | 0 1 0 | −L | 0 | 0 |
F z4 | 0 0 1 | −L | 0 | 0 |
M y4 | 0 1 0 | −L | 0 | 0 |
M z4 | 0 0 1 | −L | 0 | 0 |
W | 0 0 −1 | −a 1 | t/2 | h |
m a y | 0 −1 0 | −a 1 | t/2 | h |
Appendix B. The Equations System from the Statics of the Mechanism
Rights and permissions
Copyright information
© 2017 Springer International Publishing Switzerland
About this chapter
Cite this chapter
Moreno, G.G., Barreto, R.L.P., Vieira, R.S., Nicolazzi, L., Martins, D. (2017). Three-Dimensional Analysis of Vehicle Stability Using Graph Theory. In: Zawiślak, S., Rysiński, J. (eds) Graph-Based Modelling in Engineering. Mechanisms and Machine Science, vol 42. Springer, Cham. https://doi.org/10.1007/978-3-319-39020-8_9
Download citation
DOI: https://doi.org/10.1007/978-3-319-39020-8_9
Published:
Publisher Name: Springer, Cham
Print ISBN: 978-3-319-39018-5
Online ISBN: 978-3-319-39020-8
eBook Packages: EngineeringEngineering (R0)