
Abstract
The kinetic theory approaches to vehicular traffic modelling have given very good results in the understanding of the dynamical phenomena involved [3, 8]. In this work, we deal with the kinetic approach modelling of a traffic situation where there are many classes of aggressive drivers [5]. Their aggressiveness is characterised through their relaxation times. The reduced Paveri-Fontana equation is taken as a starting point to set the model. It contains the usual drift terms and the interactions between drivers of the same class, as well as the corresponding one between different classes. The reference traffic state used in the kinetic treatment is determined by a dimensionless parameter. The balance equations for the density and average speed for each class are obtained through the usual methods in the kinetic theory. In this model, we consider that each class of drivers preserve the corresponding aggressiveness, in such a way that there will be no adaptation effects [6]. It means that the number of drivers in a class is conserved. As preliminary results, we have obtained a closure relation to derive the Euler-like equations for two drivers classes. Some characteristics of the model are explored with the usual methods.
Access provided by Autonomous University of Puebla. Download conference paper PDF
Similar content being viewed by others


Keywords
These keywords were added by machine and not by the authors. This process is experimental and the keywords may be updated as the learning algorithm improves.
1 Introduction
In the literature, traffic flow in highways is described through different approaches going from the microscopic to the macroscopic points of view [1, 3, 8]. All have advantages as well as problems in their development. Our goal in this work is the construction of a macroscopic model starting from a kinetic approach for multiple-user class of drivers, in particular, we will focus in two classes of drivers which have certain aggressiveness. We characterise it by means of the response time, which is shortly called the relaxation time, one for each class \(\tau _1,~\tau _2,~~\tau _1\ne \tau _2\). Our treatment starts with the Reduced Paveri-Fontana equation (RPF) for the distribution function \(f_i(c,x,t)\) where we have introduced a model for the averaged desired speed, then the homogeneous steady state (equilibrium) in the system leads to a parameter \(\alpha \) which contains the aggressiveness parameter, the characteristic density and average speed proper to this state \(\rho _1^e,~\rho _2^e,~v_1^e,~v_2^e\) [6]. The kinetic model is averaged over the speed c to obtain the macroscopic equations with the interaction terms. Then, the distribution function corresponding to equilibrium is written in terms of the local densities and speeds and they are taken to calculate the passive and active interaction integrals, leading to a closure relation in the macroscopic description.
2 The Model
The kinetic model we consider to construct our macroscopic description is the reduced Paveri-Fontana equation (RPF), which comes from an integration over the desired speed giving place to an average speed called as \(c_0(c,x,t)\) where c is the instantaneous speed of vehicles. On the other hand, the interaction terms are separated according to an active \(\psi _i(c)\) or passive \(\xi _i(c)\) interaction as follows
where p is the probability of overpassing and the interaction terms are defined as
where it should be noted that we have written only the instantaneous speed dependence to shorten the notation. Clearly, the distribution functions and the densities depend on (x, t). The densities and average speeds are defined as
The average over c taken in Eq. 1 leads to the density equations
where \(\langle ...\rangle _i\) means the average over the \(f_i\) distribution function, and it should be noted that \(\langle \psi _j\rangle _i-\langle \psi _i\rangle _j=v_j-v_i\). As a consequence, we obtain that both densities satisfy conservation equations as it is expected due to their lack of adaptation between classes of drivers. Also, the macroscopic equations for flux are obtained from Eq. 1 after the multiplication by c and the corresponding integration
where \(V_i^0(x,t)\) comes from the average of the desired speed now taken over the instantaneous speed c, \(\varTheta (x,t)=\int (c-v_i)^2 f_i(c)dc\) is the \(i-\)class speed variance and \(\mathcal{P}_i\) is the traffic pressure. In this case, we do not have conservation equations. Instead, we obtained a kind of relaxation equation from the average flux \(\rho _iv_i\) to \(\rho _iv_i^*(x,t)=\rho _i[V_i^0+\tau _i\sum _j\rho _j(\langle c\xi _i\rangle _j+\langle c\psi _j\rangle _i)]\), which depends explicitly on the interaction of both within \((i-i)\) and between \((i\ne j)\) classes.
Let us call the interaction integrals as
and we must calculate them with a distribution function \(f_i(c)\) which is a solution of the kinetic Eq. 1. Here, we will use the local distribution function obtained for one class of drivers, which is given as
where the (x, t) dependence is understood in the local variables \((\rho _i,~v_i)\) and \(\varGamma (\alpha )\) is the gamma function [9].
Then, when considering the interaction between vehicles in the same class it is immediately obtained that \(\mathcal{I}_{ii}=-\rho _i\varTheta _i\). On the other hand, the case where \(i\ne j\) can be calculated in a closed way in terms of hypergeometric functions. In fact, we have found that they can be approximated by a simpler expression with the step function \(\mathcal{H}(v_i-v_j)\)
3 Two Classes of Drivers
In order to analyse the macroscopic model we consider just two classes of drivers, though it is clear that the treatment can be done in a more general case. Besides, one class goes faster than the other \(v_2>v_1\) in such a way that there is only one nonvanishing interaction integral between them \(\mathcal{I}_{12}=0,~\mathcal{I}_{21}\ne 0\).
Also, the traffic pressure chosen corresponds to the usual model for one class of drivers, it contains the speed variance \(\varTheta _i=v_i^2/\alpha \) and an anticipation term proportional to the average speed gradient and a coefficient similar to the viscosity, then
Here, the first term comes from our equilibrium state solution in which \(1/\alpha \) can be identified with the variance prefactor obtained from the empirical records in the literature [7]. In a general case, the variance prefactor is a function of the density and within a good approximation, it becomes a constant at low densities. In fact, it can be seen that the dimensionless parameter \(\alpha \sim 100\), a value which allows us to make some approximations.
3.1 The Equilibrium State
Now, we write the set of macroscopic Eqs. 4 and 5 for this particular case
where the interaction integrals are given as
with the traffic pressure written as in Eq. 9.
The solution for the equilibrium state is obtained in a direct way in terms of the equilibrium densities. First, we find that \(v_1^*=v_1^e(\rho _1^e)\) which will be written in terms of a chosen fundamental diagram here simply called \(v_1^e\), specified at the end of the calculation. From Eq. 13, the equilibrium speed for the second class is written as
where \(\delta =\frac{\rho _1^e}{\rho _2^e},~~\beta =\frac{\tau _1}{\tau _2}\) are dimensionless quantities written in terms of the model parameters and the equilibrium densities for both classes. It should be noted that both values for the quotient \(v_2^e/v_1^e\) are positive and their values depend on both the model parameters and the densities in the equilibrium state.
Now, according to Eq. 16 we have two equilibrium states and we have to decide which one has a physical meaning. First of all, the average speeds must be positive which means that the speed goes in the direction of the flow, both solutions satisfy such criteria. Second, we will ask that a free flow regime must be stable at least in a certain set of parameters values, otherwise, the model would be not able to reproduce the free flow stage. Then, our next step will be the linear stability calculation.
4 Stability Analysis
As a first step in the model analysis, we will take a small perturbation around the equilibrium state and calculate the conditions for the stability of the corresponding equilibrium solution. Hence
where the perturbation has been expanded in modes with a wave vector k and a complex frequency called \(\sigma \) in such a way that the stability condition for the equilibrium state is determined by the condition \(\mathscr {R}e\left( \sigma \right) ~>~0\).
In order to linearise the dynamical equations, it is necessary to make a comment about the density dependence in the probability of overpassing. In fact, we have taken the usual modelling and express it in terms of an effective density, then \(1-p=\rho _{eff}\), where \(\rho _{eff}=\rho /\rho _{max}\). Besides, in the two classes model it has been argued [2, 10] that the effective density for the slow class (class-1 in our case) is given as \((\rho _1)_{eff}=\rho _1/\rho _{max}\). On the other hand, for the fast class \((\rho _2)_{eff}=(\rho _1+\rho _2)/\rho _{max}\).
The direct substitution of Eq. 17 in the set of Eqs. 10–13 and the corresponding linearisation can be written in terms of a matrix in which its determinant must vanish to obtain the dispersion relation,
The quantities a are given as
all of them can be written in terms of the dimensionless parameters.
Due to the fact that the macroscopic equations are valid in a kind of hydrodynamical limit \((k\rightarrow 0)\), we will expand the roots in the dispersion relation around \(k=0\) and take terms up to order \(k^2\),
and there will be four different roots, which will be called as \(\varSigma _i\). The results being given as follows
where \(\gamma _{11}^e=(dv_1^e/d\rho _1)^e\) and can be calculated once the fundamental diagram for the slow class is chosen.
The mode determined by \(\varSigma _1\) associated with the slow class density \((\rho _1)\) propagates with a speed \(c_1=v_1^e+\gamma _{11}^e\rho _1^e\) and the real part of it determines a time scale which tends to zero as \(k^2\). However, this real part must be positive to have stability, it means that the quantity \(c_1^2-(\alpha +1)(\gamma _{11}^e\rho _1^e)^2>0\) and it depends on the slow class fundamental diagram. Note that this condition corresponds to the usual one for Payne-like models, it is known that in this case there exists stability regions [4]. The root \(\varSigma _2\) has a leading term independent of the wave vector magnitude given by the relaxation time in the slow class \((\tau _1)\), obviously positive. This root is associated with mode \(v_1\), which also propagates with a speed determined by the fundamental diagram.

Real part of root \(\varSigma _{32}\) for \(\alpha =100\). We recall that \(\delta \) and \(\beta \) correspond to the quotient between the equilibrium densities and the relaxation times \(\tau _1,~\tau _2\)

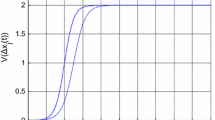
The effective relaxation time determined by the leading term in root \(\varSigma _4\)
The modes in the fast class \((\rho _2,~v_2)\) also propagate and both of them determine the stability condition. First, the real part in root \(\varSigma _3\) is given through \(\varSigma _{32}\) and it can be written as
where \(c_2=\frac{1}{1-a_4}[(a_4-1)v_2^e-a_2\rho _2^e]\) is the propagation speed for mode \(\rho _2\).
Lastly, the leading term in root \(\varSigma _4\) determines an effective relaxation time given as \((1-a_4)/\tau _2\), which must be positive to have the interpretation given as time of response in the fast class. Figure 1 shows this characteristic for a region of the parameters \(\delta ,~\beta \) with \(\alpha =100\). It should be mentioned that this characteristic is valid only for the equilibrium state \((v_2^e/v_1^e)^-\) meaning that this equilibrium state represents a physical point of interest. Its behaviour is shown in Fig. 2, where we can see that the region of stability coincides with the stability situation for \(\varSigma _{32}\).
5 Concluding Remarks
The kinetic model based on the reduced Paveri-Fontana equation when applied to two classes of drivers leads to a macroscopic model where the interaction between user classes plays an important role. In fact, even in the simplest case studied in this paper we have found that the free flow is stable only for a region of densities and relaxation times. The analysis and figures shown tell us that the stability occurs for certain regions in the \(\delta \) and \(\beta \). First, \(\delta >1\) which means that the density of the slow vehicles must be greater than the density of fast vehicles. Besides the fact that \(\beta >1\) shows that the relaxation time for the slow class is bigger than the corresponding relaxation time for the fast class. Both conditions together lead to the stability of just one equilibrium state for which it is possible to obtain free flow, at least in a small region. It should be mentioned that this result represents a step in the complete analysis of the model and some simulations must be performed in the unstable region to possibly find other traffic phases.
References
Helbing, D.: Traffic and related self-driven many-particle systems. Rev. Mod. Phys. 73(4), 1067 (2001)
Hoogendoorn, S., Bovy, P.: Modeling multiple user-class traffic. Trans. Res. Rec. J. Trans. Res. Board 1644, 57–69 (1998)
Kerner, B.S.: Introduction to modern traffic flow theory and control: the long road to three-phase traffic theory. Springer Science & Business Media (2009)
Kerner, B.S., Konhäuser, P.: Cluster effect in initially homogeneous traffic flow. Phys. Rev. E 48(4), R2335 (1993)
Marques, W., Méndez, A.: On the kinetic theory of vehicular traffic flow: Chapman-Enskog expansion versus grads moment method. Phys. A Stat. Mech. Appl. 392(16), 3430–3440 (2013)
Méndez, A., Velasco, R.: Kerner’s free-synchronized phase transition in a macroscopic traffic flow model with two classes of drivers. J. Phys. A Math. Theor. 46(46), 462001 (2013)
Shvetsov, V., Helbing, D.: Macroscopic dynamics of multilane traffic. Phys. Rev. E 59(6), 6328 (1999)
Treiber, M., Kesting, A.: Traffic Flow Dynamics, Data, Models and Simulation. Springer, Berlin (2013)
Velasco, R., Marques Jr, W.: Navier-stokes-like equations for traffic flow. Phys. Rev. E 72(4), 046102 (2005)
van Wageningen-Kessels, F., Van Lint, H., Vuik, K., Hoogendoorn, S.: Genealogy of traffic flow models. EURO J. Trans. Logist. 4(4), 445–473 (2015)
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2016 Springer International Publishing Switzerland
About this paper
Cite this paper
Marques, W., Velasco, R.M., Méndez, A. (2016). A Multi-class Vehicular Flow Model for Aggressive Drivers. In: Knoop, V., Daamen, W. (eds) Traffic and Granular Flow '15. Springer, Cham. https://doi.org/10.1007/978-3-319-33482-0_60
Download citation
DOI: https://doi.org/10.1007/978-3-319-33482-0_60
Published:
Publisher Name: Springer, Cham
Print ISBN: 978-3-319-33481-3
Online ISBN: 978-3-319-33482-0
eBook Packages: Mathematics and StatisticsMathematics and Statistics (R0)