
Abstract
This paper describes the performance analysis of an autonomous drifting buoy equipped with a GNSS receiver, an inertial measurement unit and a single beam echosounder. The system is intended for surveying difficult access areas like high-flowing rivers, confined zones and ultra shallow waters, which are unreachable using a classical survey launches.
Access provided by Autonomous University of Puebla. Download chapter PDF
Similar content being viewed by others


Keywords
These keywords were added by machine and not by the authors. This process is experimental and the keywords may be updated as the learning algorithm improves.
1 Introduction
In the framework of dams construction and exploitation, there is a need to map riverbeds in support to hydropower infrastructure construction and maintenance. White water areas often show a limited access and high flows and therefore cannot be surveyed with a classical hydrographic survey launch. In 2008, motivated by a demand from the company Hydro-Quebec, the CIDCO realized a technical review of the available systems for such surveying tasks, and concluded that the development of a new system should be undertook. This system, called HydroBall\(^{\circledR }\), provides a low cost integrated solution for bathymetric data acquisition in hostile and non accessible areas. Its spherical design and robust shell casing encloses a single beam echosounder, a GNSS receiver, a MEMs IMU and a bluetooth communication link.

The HydroBall\(^{\circledR }\) system is integrated in a 40 cm sphere. It is equipped with a SBES operating at 500 kHz, a L1/L2 GNSS receiver and a MEMs Inertial Measurement Unit
Compared to existing drifting buoys [1–5], the HydroBall\(^{\circledR }\) system is intended to achieve hydrographic survey with a level of precision which complies with international and industrial standards, as it will be shown in the next sections by a Total Propagated Uncertainty analysis.
After some successful trials for riverbed surveys, the range of application rapidly grew to confined area surveys, standard SBES hydrographic surveys and shore profiling surveys. Indeed, due to the fact that this system is a fully integrated SBES survey system it can be deployed from any opportunity platform.
The first section presents the system in terms of hardware integration and processing software as well as several survey projects that have been conducted using HydroBall\(^{\circledR }\). In the second section we present the a priori Total Propagation Uncertainty (TPU) analysis of the system. In section three, the results are compared to actual a posteriori TPU observations obtained from surveys data.
2 The HydroBall\(^{\circledR }\) System and Its Applications
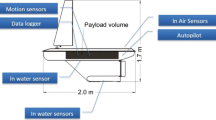
The HydroBall\(^{\circledR }\) system integrates a SBES operating at 500 kHz, a dual frequency GNSS receiver, a MEMs IMU and a bluetooth communication link (see Fig. 1). The system is fully autonomous, thanks to a micro-controller which hosts a data acquisition and management system. The system has a minimum autonomy of 24 h.
On operation, once the GNSS receiver is able to deliver a position, all data from the other sensors (SBES, IMU) are time-tagged and saved in raw data files. As the HydroBall\(^{\circledR }\) integrates low-cost sensors unable to take in input any timing information, all data are time stamped upon reception by the micro-controller. The micro-controller’s clock is regularly reset on the GNSS time, as provided by the GNSS receiver.
As the HydroBall\(^{\circledR }\) system is intended for an autonomous usage, it is very important to guarantee the data quality, as no operator can handle any problem occurring within the system, in the same way a qualified hydrographer would operate a classical SBES survey system. Data quality is analyzed in the next section, thanks to a objective comparison between an a priori TPU computation and a a posteriori TPU observation.

Some applications of the HydroBall\(^{\circledR }\) system: Top left Transect of a river (Rimouski river); Top right Riverbed survey (Rimouski river); Middle left Deployment from an inflatable (Anguille Lake); Middle right Deployment from an amphibious vehicle for beach profiling (Anse au Lard); Bottom left Survey in a confined area (Romaine river); Bottom right Deployment from an Helicopter for dangerous areas surveys (Romaine river)
HydroBall\(^{\circledR }\) data processing is performed off-line and consists in three steps:
-
1.
GNSS data post-processing: GNSS data are converted into RINEX format and the user can process these data in PPK mode, using corrections from a network of permanent station or from a fixed GNSS beacon. Note that the L1/L2 GNSS receiver can also compute position fixes in RTK mode;
-
2.
Attitude and SBES returns are selected thanks to their time tag;
-
3.
The computation of the corresponding sounding in the Local Geodetic Frame is performed: Post-processed GNSS data, attitude and SBES returns are merged by a software written in Python which associates to any SBES return a sounding coordinated in the Local Geodetic Frame. This software implements appropriate corrections for latency and boresight angles between the SBES and the IMU.
In Fig. 2, we describe how the HydroBall\(^{\circledR }\) has been deployed for various types of surveys.
The primary usage of HydroBall\(^{\circledR }\) is riverbed surveys. Both transversal profiling surveys and longitudinal drifting surveys have been performed. It appeared that in practice, during survey project conducted by the CIDCO, HydroBall\(^{\circledR }\) was easier to deploy and set-up than a traditional pole mounting SBES survey system in the framework of classical single beam surveys. The main added-value of HydroBall\(^{\circledR }\) has been to enable us to survey non accessible areas where no traditional surveys means could be deployed:
-
In ultra-shallow waters, HydroBall\(^{\circledR }\) exhibits good performances for projects that require both land survey and bathymetric survey data. For instance beach profiling is a typical application for which the HydroBall\(^{\circledR }\) compactness and full integration of GNSS and SBES are relevant. For this class of application, the system has been mounted on an Argo amphibious vehicle. In this configuration, the HydroBall\(^{\circledR }\) delivers SBES data until reaching the land (the SBES gives returns until a minimum depth of 10 cm) and is able to perform a mobile land GNSS survey while operating on the beach.
-
In non accessible areas (canyons, kettles, etc.), HydroBall\(^{\circledR }\) can easily be deployed and recovered by hand.
-
In areas where safety is an issue, HydroBall\(^{\circledR }\) has been deployed from an Helicopter and has shown to be an appropriate respond to challenging survey works. Indeed, the upstream section of one of the Romaine river rapid has been surveyed with this system.
3 Total Propagated Uncertainty of the HydroBall\(^{\circledR }\) System
The HydroBall\(^{\circledR }\) system can be described by:
-
A reference point which is an arbitrary point of the HydroBall\(^{\circledR }\). This point is the origin of all lever arms measurements.
-
Lever arm (denoted by \(a_{bV}\) in Fig. 3), supposed to be measured in the (bV) frame, a frame defined in reference of the HydroBall\(^{\circledR }\) body itself.
-
Frames attached to the SBES and the IMU. They are denoted respectively by (bS) and (bI).
-
A local geodetic frame, or navigation frame used for platform orientation purposes.

HydroBall\(^{\circledR }\) Sketch. The lever-arm vector \(a_{bV}\) is defined from the GNSS antenna center of phase to the SBES transducer acoustic center
The single beam echo sounder returns will be denoted by
where \(\rho \) is the raw SBES return, supposed to be corrected from refraction due to the sound speed profile. We shall denote by \(C_{bS}^{bI}\) the boresight transformation matrix between the (bS) frame and the (bI) frame. This transformation matrix describes the mis-alignment between the SBES and the IMU. Therefore, the vector \(C_{bS}^{bI} r_{bS}\) is the SBES return coordinated in the IMU frame.
Denoting by \(P_{n}\) the position delivered by the GNSS receiver (expressed in the navigation frame n), and \(X_n\) the sounding position we finally obtain the following spatial referencing equation:
Spatial referencing error analysis purpose is to quantify the impact of measurement errors on the soundings \(X_n\). Let us first differentiate between the positioning error and the ranging error. Indeed, any positioning error translates the sounding location. We can write \(X_n = P_n + r_n\), where
In order to check the GNSS fix quality (i.e.; the precision of \(P_n\)) and in particular the effect of sea surface induced multi-path, the following procedure has been applied. The HydroBall\(^{\circledR }\) has been moored in the inter-tidal zone and GNSS data has been recorded during a tide cycle, as shown in Fig. 4. These static test concluded to the absence of variability of the GNSS position fix, as the horizontal and vertical errors were respectively 2.4 cm and 4 cm for 95 % of the observations, which is the same uncertainty level which was observed during static tests on geodetic control points.

On top, HydroBall\(^{\circledR }\) trials for assessment of the sea surface multipath refection. Bottom Vertical error through time and 2D horizontal error plots
The term \(r_n\) is formed by:
-
The sounder return vector, expressed in the (n) frame: \(r_n = C_{bI}^{n}\; ( C_{bS}^{bI} \;r_{bS} \; )\)
-
The lever-arm expressed in the (n) frame: \(a_n = C_{bI}^{n}\; C_{bS}^{bI}\; a_{bI}\)
We can write both \(r_n\) and \(a_n\) as a function of all sensors parameters:
the term due to the ranging device and by
the term due to lever arms. From (1), we have:
Let us now denote by
the state vector of the HydroBall\(^{\circledR }\).
The vector \(\chi \) will be now supposed to lie within the neighborhood of any vector \(\chi _0\), and submitted to random uncertainty \(\chi = \chi _0 + \delta \chi \), \(\delta \chi \) being a random variable in \(R^{8}\) with variance-covariance matrix \(\Sigma _{\delta \chi }\).
We aim to propagate the variance/covariance matrix \(\Sigma _{\delta \chi }\) through the geolocation equation. Unfortunately, the variance/covariance propagation law only applies to linear transformations,Footnote 1 we need to linearize equation (2). Linearization of (2) around the measurement vector \(\chi _0\) is nothing else than the Taylor expansion of \(X_n\) around \(\chi _0\):
Denoting by \(\delta r_n= r_n(\chi ) - r_n(\chi _0) \) and \(\delta \chi = \chi - \chi _0\), we rewrite the previous equation by:
where \(\displaystyle \frac{\partial f}{\partial \chi }(\chi _0)\) is the jacobian matrixFootnote 2 of \(X_n\) evaluated at point \(\chi _0\).
From (3) we can propagate the variance-covariance matrices of the measurement vector \(\chi \):
From this last equation, we can derive the variance of Easting, Northing and elevation of any sounding due to IMU and SBES measurements errors, lever-arms uncertainties. In addition to this, one should add the positioning error variance, leading finally to
As an example, the a priori TPU has been computed in a particular configuration: \(\phi ,\theta ,\psi =20^\circ \), \(\phi _b=\theta _b=\psi _b=0^\circ \), \(a_x=a_y=0\), \(a_z=0.38\) m. The covariance matrix \(\Sigma _{\delta \chi }\) is chosen directly according to sensors performances. Results are shown in Fig. 5.

Plot of the horizontal error and vertical error components versus a maximum admissible error bound defined for a particular application. From this plot we can see the maximum operational range of the system (about 17 m depth) in order to meet the uncertainty requirement
4 A Posteriori Total Propagated Uncertainty of the HydroBall\(^{\circledR }\) System

MBES reference surface and Hydroball\(^{\circledR }\) data (on the right). The red box shows the location of the overlap between HydoBall and MBES datasets
The analysis of the a posteriori TPU of the HydroBall\(^{\circledR }\) has been performed by using a reference surface constructed from a multi-beam survey conducted by the CIDCO in the Rimouski area, using a Reson 7125 MBES and a Pos-MV320/PPK hybrid inertial/GNSS positioning system. Figure 6 shows the reference surface and the surface constructed from HydroBall\(^{\circledR }\) data.
The HydroBall\(^{\circledR }\) has been surveying the reference surface and an error analysis has been conducted for an area which average depth is about 5 m. We observed that 95 % of the error are less than 5 cm which is in accordance with the a priori error analysis, as shown in Fig. 7.

Error surface between the HydroBall\(^{\circledR }\) dataset and the multibeam reference data set. Areas in green indicates an error lower than 5 cm. 95 % of the errors are less than 5 cm
5 Conclusion and Future Work
This paper described an autonomous hydrographic survey buoy and shown the results that validate the data quality, according to international and industrial standards. First motivated by the survey of non accessible rivers, we shown that this system can be used in a flexible way for various applications. Its main advantage is that it does not require any survey ship installation and mobilization as it can be used on any opportunity boat or amphibious vehicle. As this system is compact, opened and offers open-source data processing tools, it is thus well adapted for hydrographers training. Indeed, all the principles of SBES data processing are implemented in a Python software, therefore enabling students to fully operate and understand SBES surveying activities.
Future work will focus on the real-time transmission of survey data by a wide range WiFi telemetry system and to the on-line quality control of survey data. The CIDCO developed quality control software tools devoted to single beam data analysis. They will be adapted to check in real-time the presence of systematic errors like erroneous sound speed profiles or positioning errors, in order to enable the remote user to monitor the data quality of the HydroBall\(^{\circledR }\) system.
Notes
- 1.
Let us recall that if \(Y=AX\), X being a random vector with variance/covariance \(\Sigma _X\), then \(\Sigma _Y=A \; \Sigma _X \; A^T\).
- 2.
The jacobian matrix of a function \(f:R^p\rightarrow R^n\) at point \(\chi _0\) is the linear operator represented by the matrix \(\displaystyle [\frac{\partial f_i}{\partial \chi _j}(\chi _0)]_{ij}\).
References
Emery, L., Smith, R., McNeal, D., & Hughes, B. (2009). Drifting buoy for autonomous measurement of river environnment. In OCEANS 2009, MTS/IEEE Biloxi—Marine Technology for Our Future: Global and Local Challenges.
Swick, W., & MacMahan, J. (2009). The use of position-tracking drifters in riverine environments. In OCEANS’09 MTS/IEEE Biloxi.
MacMahan, J. (2010). Drifter Trajectories in Riverine Environments. Naval Postgraduate School, Monterey, CA, USA: Report Oceanography Department.
Emery, L., Smith, R., McQuary, R., Hughes, B., & Taylor, D. (2011, September 19–22). Autonomous river drifting buoys applications and improvements. In OCEANS 2011.
Albaladejo, C., Soto, F., Torres, R., Sanchez, P. & Lopez, J. (2012). A low-cost sensor buoy system for monitoring shallow marine environments. Sensors, 12(7), 9613–34.
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2016 Springer International Publishing Switzerland
About this chapter
Cite this chapter
Rondeau, M., Seube, N., Denuf, J.L. (2016). Surveying in Hostile and Non Accessible Areas with the Bathymetric HydroBall\(^{\circledR }\) Buoy. In: Zerr, B., et al. Quantitative Monitoring of the Underwater Environment. Ocean Engineering & Oceanography, vol 6. Springer, Cham. https://doi.org/10.1007/978-3-319-32107-3_5
Download citation
DOI: https://doi.org/10.1007/978-3-319-32107-3_5
Published:
Publisher Name: Springer, Cham
Print ISBN: 978-3-319-32105-9
Online ISBN: 978-3-319-32107-3
eBook Packages: EngineeringEngineering (R0)