
Abstract
In the present contribution, isogeometric methods are used to analyze the statics and dynamics of rods as well as plane strain and plane stress problems based on a simplified version of the form II of Mindlin’s strain gradient elasticity theory. The adopted strain gradient elasticity models, in particular, include only two length scale parameters enriching the classical energy expressions and resulting in fourth order partial differential equations instead of the corresponding second order ones based on the classical elasticity. The problems are discretized by an isogeometric non-uniform rational B-splines (NURBS) based \( C^{p-1} \) continuous Galerkin method. Computational results for benchmark problems demonstrate the applicability of the method and verify the implementation.
Access provided by Autonomous University of Puebla. Download chapter PDF
Similar content being viewed by others

Keywords
1 Introduction. Basic Formulae of the Mindlin’s Gradient Elasticity Theory
Classical linear theory of elasticity is not capable to describe multi-scale phenomena as effects of meso-scale, micro-scale or nano-scale in primarily macro-scale problems because it leaves out of account that materials have microstructure. A lot of improvements of classical elasticity theory have been done in order to explain such effects. One of the first significant contributions was done by Mindlin (1964). His first strain gradient theory of linear elasticity implies the existence of an additional term in the definition of the potential energy W:
where \(\varvec{\varepsilon }\) stands for the classical strain tensor, \(\varvec{\tau }\) is the Cauchy stress tensor, \(\varvec{\mu }\) is the double stress tensor and \(\varvec{\kappa }\) is the micro-deformation gradient tensor. The nabla-operator is denoted by \(\nabla \) and can be defined in Cartesian coordinate system as \(\nabla = {\varvec{e}}_i \frac{\partial }{\partial x_i}\), \(\int _{B}^{}\mathrm {d}V \) designates integration over the volume of a body B.
Form II Mindlin’s strain gradient elasticity theory proposes to define tensor \(\varvec{\kappa }\) as the gradient of the macroscopic strain:
The simplest variant of this theory widely used in the literature, with roots in Aifantis (1992), Altan and Aifanis (1997), defines the double stress tensor as follows
where \(l_s\) denotes gradient elasticity parameter which has dimension of length.
In the framework of considering gradient theory, the well known expressions for classical stress and strain tensors are valid:
Here \({\varvec{u}}\) stands for the displacement vector and \({\varvec{C}}\) is the fourth-order tensor of elastic moduli.
By substitution (2) and (3) into (1), one can obtain the expression for the potential energy by using only the classical stress and strain tensors:
The kinetic energy has an additional term as well:
where \(\rho \) stands for the mass density, upper dots indicate the differentiation with respect to time and \(l_d\) is the second gradient coefficient called micro inertia coefficient with the dimension of length.
The work done by external forces alongside with two classical terms has two additional ones:
where \({\varvec{F}}\) stands for the body force per unit volume, \({\varvec{P}}\) is the traction force, \({\varvec{R}}\) is the double traction force, \(\int _{\partial B} \mathrm {d}S\) denotes integration over the surface of the body, \({\varvec{n}}\) is the unit vector normal to the surface, \( {\varvec{E}}\) is the force distributed on the wedges \({\partial \partial B_E}\) of the body surface, \(\oint _{\partial \partial B_E}^{} \mathrm {d}l\) denotes integration over these wedges. For simplicity, external loadings at possible corners of the wedges (see, for instance, Polizzotto 2012) have been excluded in the formulation above.
By substitution of (6)–(8) into Hamilton’s principle for independent variation \(\delta {\varvec{u}}\) between fixed limits of \({\varvec{u}}\) at times \(t_0\) and \(t_1\)
one can obtain the equation of motion of elastic continuum with micro-structure:
and expressions for the external forces (Mindlin 1964; Polizzotto 2012):
where \(\varDelta = \nabla ^2\) stands for the Laplacian, \(\nabla _s\) being the surface part of the nabla-operator: \(\nabla _s = \nabla - {\varvec{n}} \otimes {\varvec{n}} \cdot \nabla \), \({\varvec{s}}\) being the unit vector tangent to C and \({\varvec{L}}\) is the third order Levi-Civita tensor. The bold face brackets in (11c) indicate that the enclosed quantity is the difference of its values, at \(\partial \partial B\) on the two portions of \(\partial B\) that intersect at \(\partial \partial B\).
2 Weak Form
Vector equation of motion (10) within a framework of the gradient elasticity theory is partial differential equation with high order derivatives. It can be solved analytically only in the simplest cases. The most common way of solving continuum mechanics problems numerically is to use the family of Finite Element Methods. In order to get the numerical solution, it is necessary to begin with definition of the weak form of the equation:
Definition 3.1
For a given loading \({\varvec{F}} \in [L^2(B)]^3\) find the deformation vector \({\varvec{u}} \in {\varvec{U}}\) such that
where the bilinear form \(a:{\varvec{U}} \times {\varvec{W}} \rightarrow \mathbb {R}^3\) and the load functional \(l: {\varvec{W}} \rightarrow \mathbb {R}^3\), respectively, are defined as
Here \({\varvec{U}}\) is a subspace of Sobolev space \([H^2(B)]^3\) and each function from this subspace satisfies the Dirichlet boundary conditions:
Functions from \({\varvec{W}}\) satisfy the homogeneous Dirichlet boundary conditions:
Galerkin’s method suggests to represent an approximate solution (trial function) and test function by using a finite number of basis functions
at that \({\varvec{u}}^h \in {\varvec{U}}^h\) and \({\varvec{w}}^h \in {\varvec{W}}^h\), where \({\varvec{U}}^h\) and \({\varvec{W}}^h\) are finite-dimensional approximations of \({\varvec{U}}\) and \({\varvec{W}}\):
An important fact arises from (18) for a conforming method: the solution space must be a subspace of Sobolev space \([H^2(B)]^3\). It means that basis functions \(\varphi _i\) must provide at least \(C^1\) continuity from element to element. Classical Lagrange basis functions can provide only \(C^0\) continuity and consequently they are not suitable for solving the gradient elasticity problems. There are a lot of different modifications of Galerkin’s methods but probably the most universal and advanced one is Isogeometric Analysis introduced by Hughes et al. (2005).
3 Isogeometric Analysis
Isogeometric Analysis (IGA) can be considered as the “next generation” of the finite-element methods family. It has been under development at a quick rate during last 10 years. The main idea of IGA is to use the non-uniform rational B-splines (NURBS) as basis functions \(\varphi _i\). This peculiarity causes a lot of advantages of IGA methods such as the exact representation of the problem geometry. Interested readers advised to reach for the book devoted to Isogeometric Analysis (Cottrell et al. 2009).
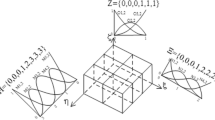
In the context of the gradient elasticity theory the most important property of IGA is the \(C^{p-1}\) continuity provided across the elements boundaries in each parametric direction. Here p is an order of the NURBS basis functions in one of the directions. The NURBS basis is constructed by using 1D B-spline basis functions which can be defined by using Cox-de Boor recursion formula:
Definition of 3D NURBS basis functions is presented below:
where \(w_{i,j,k}\) are weight coefficients.
4 Numerical Results
This section is devoted to results of numerical solutions of some benchmark problems which were obtained from (10)–(11) by dimension reduction. For more results the interested reader can look at Niiranen et al. (2015a, b).
4.1 Static Rod in Tension
Consider a straight prismatic rod of constant cross section area A and length L. The displacement along the longitudinal axis x are denoted by u. Material of the rod is isotropic with Young’s modulus E and gradient coefficient \(l_s\). According to Papargyri-Beskou et al. (2010), the governing equilibrium equation of this rod in terms of displacements can be written as follows (body force is set to be zero):
Boundary conditions for the gradient rod under tension are assumed to be:
Solution for the problem (21)–(22) can be found analytically. It means that this problem can be used for the examination of the IGA applicability for solving of 1D problems of the gradient elasticity theory.

\(L^2\), \(H^1\) and \(H^2\) norms of error of the stretched rod displacements for different order of the NURBS basis functions
Convergence curves for different orders p of the NURBS basis functions presented on Fig. 1 seem to follow the next formula:
where \(||\cdot ||_m\) denotes the norm corresponding to the Sobolev space \(H^m(L)\), \(u^h\) is the approximate solution, c is an unknown constant and h is the element size. Convergence rate is denoted by \(\beta \) and expression for it depends on the degree of the Sobolev norm m of the solution error. In context of the gradient elasticity \(H^2\) norm is the energy norm and its convergence rate equals to \(\beta = p-1\). For \(L^2\) norm (or \(H^0\) norm) the convergence rate equals to \(\beta = min\{p+1, \ 2(p-1)\}\) and for \(H^1\) norm it is equal to \(\beta = p\). These results are in agreement with the theoretical analysis in Niiranen et al. (2015b) and Cottrell et al. (2009).

Dimensionless axial strains of the stretched rod for different values of the gradient elasticity parameter
Figure 2 represents the dimensionless strain of stretched rod along axis x for the different values of the gradient parameter \(l_s\):
In distinction from the classical theory for which strain \(\varepsilon _{\mathrm {c}}\) is uniform along the rod axis, the gradient theory gives strain \(\varepsilon _{\mathrm {gr}}\) which is not uniform. It means that 1D gradient elasticity can explain the local elongation and further fracture in the middle of a tension specimen: primarily plastic deformations will most likely occur in a zone of the maximum elastic strain.
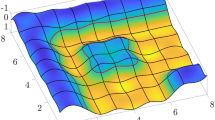
4.2 2D Dynamic Problem
Consider a square domain \(\varOmega \) with the side length \(L = 10\) mm. Material properties are defined by Lame parameters \(\lambda \) and \(\mu \), mass density \(\rho \) (they are assumed to be equal to the parameters of standard steel), and gradient coefficients \(l_s = 1\) mm and \(l_d = 0.5\) mm. The governing equation of motion of 2D domain in plane strain/stress state can be written as follows (body force is set to be zero):
Boundary conditions are assumed to be
Numerical solution for the spectral problem (25) and (26) is presented in Table 1. As one can see, gradient elasticity theory changes the body eigen frequencies and difference between results of classical and gradient elastic theories rises with increasing of the frequency number.
References
Aifantis E (1992) On the role of gradients in the localization of deformation and fracture. Int J Eng Sci 30:1279–1299
Altan B, Aifanis E (1997) On some aspects in the special theory of gradient elasticity. J Mech Behav Mater 8:231–282
Cottrell J, Hughes T, Bazilevs Y (2009) Isogeometric analysis: toward integration of CAD and FEA. Wiley, Chichester
Hughes T, Cottrell J, Bazilevs Y (2005) Isogeometric analysis: CAD, finite elements, nurbs, exact geometry and mesh refinement. Comput Method Appl Mech Eng 194:4135–4195
Mindlin R (1964) Micro-structure in linear elasticity. Arch Ration Mech Anal 16(1):51–78
Niiranen J, Balobanov V, Kiendl J, Hosseini B (2015a) Variational formulation and isogeometric analysis of six-order boundary value problems of gradient Bernoulli beams (submitted)
Niiranen J, Khakalo S, Balobanov V, Niemi A (2015b) Variational formulation and isogeometric analysis for fourth-order boundary value problems of gradient-elastic bar and plane strain/stress problems (submitted)
Papargyri-Beskou S, Giannakopoulos A, Beskos D (2010) Static analysis of gradient elastic bars, beams, plates and shells. Open Mech J 4:65–73
Polizzotto C (2012) A gradient elasticity theory for second-grade materials and higher order inertia. Int J Solids Struct 49:2121–2137
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2016 Springer International Publishing Switzerland
About this chapter
Cite this chapter
Balobanov, V., Khakalo, S., Niiranen, J. (2016). Isogeometric Analysis of Gradient-Elastic 1D and 2D Problems. In: Altenbach, H., Forest, S. (eds) Generalized Continua as Models for Classical and Advanced Materials. Advanced Structured Materials, vol 42. Springer, Cham. https://doi.org/10.1007/978-3-319-31721-2_3
Download citation
DOI: https://doi.org/10.1007/978-3-319-31721-2_3
Published:
Publisher Name: Springer, Cham
Print ISBN: 978-3-319-31719-9
Online ISBN: 978-3-319-31721-2
eBook Packages: EngineeringEngineering (R0)