
Abstract
Thermoelastic wave propagation suggests a coupling between elastic deformation and heat conduction in a body. Microstructure of the body influences the both processes. Since energy is conserved in elastic deformation and heat conduction is always dissipative, the generalization of classical elasticity theory and classical heat conduction is performed differently. It is shown in the paper that a hyperbolic evolution equation for microtemperature can be obtained in the framework of the dual internal variables approach keeping the parabolic equation for the macrotemperature. The microtemperature is considered as a macrotemperature fluctuation. Numerical simulations demonstrate the formation and propagation of thermoelastic waves in microstructured solids under thermal loading.
Access provided by Autonomous University of Puebla. Download chapter PDF
Similar content being viewed by others


Keywords
- Internal Variable
- Free Energy Density
- Internal Heat Source
- Dissipation Inequality
- Hyperbolic Heat Conduction
These keywords were added by machine and not by the authors. This process is experimental and the keywords may be updated as the learning algorithm improves.
1 Introduction
Microstructure of a body influences both wave propagation and heat conduction. Microstructure-oriented theories of generalized continua [1–4] are, as a rule, isothermal, whereas the generalization of heat conduction to non-Fourier laws [5–8] is usually restricted by the consideration of homogeneous and even rigid conductors. The main problem is, therefore, to elaborate a conjoint framework for the description of coupled conservative and dissipative processes. As shown recently, such an unification is possible on the basis of the dual internal variables approach [9, 10].
In the conventional thermoelasticity, the free energy density is a function of the deformation gradient and temperature only and cannot depend on the temperature gradient. However, the temperature gradient influence on the thermomechanical response of a microstructured material is expected in the presence of varying temperature fields at the microstructure level [11]. This means that a weakly non-local description should be applied [12]. As a result of the application of the dual internal variables theory, it is possible to obtain a hyperbolic evolution equation for microtemperature keeping the parabolic equation for the macrotemperature [10]. The microtemperature is considered as a macrotemperature fluctuation. Effects of microtemperature gradients exhibit themselves on the macrolevel due to the coupling of equations of macromotion and evolution equations for macro- and microtemperatures. The overall description of thermomechanical processes in microstructured solids includes both direct and indirect couplings of equations of motion and heat conduction at the macrolevel. In addition to the conventional direct coupling, there exists the coupling between macromotion and microtemperature evolution. This means that the macrodeformation induces microtemperature fluctuations due to the heterogeneity in the presence of a microstructure. These fluctuations, propagating with a finite speed, can induce, in turn, corresponding changes in the macrotemperature. Then the appeared changes in the macrotemperature affect macrodeformations again. Numerical simulations demonstrate the formation and propagation of thermoelastic waves in microstructured solids under thermal loading [13].
The purpose of the paper is twofold. First, the difference between the standard single internal variable theory and the dual internal variable approach is emphasized. Next, it is demonstrated how thermal gradients produced by an appropriate microstructure are able to generate fluctuations propagating with a finite speed without introducing a hyperbolic heat conduction equation for the macrotemperature.
2 Internal Variables Formalism
Before the application of the dual internal variable approach to the description of dynamic response of solids with microstructure, it is worth to explain the difference between the single internal variable theory and the dual internal variables approach. We start with the remainder of the single internal variable technique.
2.1 Single Internal Variable in One Dimension
We consider the simplest possible situation, i.e. a “body” or a “system” in one dimension. Suppose that all thermodynamic quantities like temperature, energy, entropy, etc. are defined. Then we assume that the free energy density W is specified as a function of temperature \(\theta \) and an internal variable \(\varphi \) and its space derivative
Constitutive assumption (1) allows us to write down so-called “equations of state” (just definition of additional quantities)
where S is the entropy density per unit reference volume.
The balance of internal energy in this case can be represented as
where E is the internal energy density and Q is the heat flux, indices denote time and space derivatives. Remembering the connection between internal energy and free energy, i.e., \(W=E-S\theta \), we arrive at another form of the energy balance
where the right-hand side of Eq. (4)\(_1\) is formally an internal heat source [14].
The energy balance should be accompanied by the second law of thermodynamics here written as
where K is the “extra” entropy flux that vanishes in most cases, but this is not a basic requirement [14].
Multiplying the second law (5) by \(\theta \)
and taking into account Eq. (4), we obtain
The internal heat source \(h^{int}\) is calculated as follows:
Accounting for Eq. (8), dissipation inequality (7) can be rewritten as
To rearrange the dissipation inequality, we add and subtract the same term \(\eta _{x}{\varphi }_{t}\)
which leads to
Following [15], we select the “extra” entropy flux in such a way that the divergence term in Eq. (11) will be eliminated
Then dissipation inequality (11) reduces to
It is remarkable that in the isothermal case (\(\theta _{x}=0\)) the dissipation is determined by the internal variable only.
The simplest choice to satisfy the dissipation inequality (13) in the isothermal case
is the following one:
since dissipation inequality (14) is satisfied automatically in this case
It is easy to see that the dissipation is the product of the thermodynamic flux \({\varphi }_{t}\) and the thermodynamic force \((\tau -\eta _{x})\). The proportionality between the thermodynamic flux and the conjugated force is the standard choice to satisfy the dissipation inequality.
To see how the obtained evolution equation looks like, we specialize free energy dependence (1) in the isothermal case to a quadratic one
where B and C are material parameters. It follows from equations of state (2) that
and evolution equation (15) is an equation of reaction-diffusion type
The given standard formalism of internal variables of state is sufficient for many cases [16].
2.2 Dual Internal Variables
The dual internal variables approach is the extension of the technique described above. We suppose that the free energy density depends on internal variables \(\varphi , \psi \) and their space derivatives
The equations of state in the case of two internal variables read
We introduce the non-zero extra entropy flux following the case of a single internal variable and set
It can be checked that the intrinsic heat source is determined in the considered case as follows
The latter means that the dissipation inequality in the isothermal case reduces to
The solution of the dissipation inequality can be represented as [17]
The non-negativity of the entropy production (24) results in the positive semidefiniteness of the conductivity matrix \(\mathbf {L}\), which requires
To be more specific, we keep a quadratic free energy density in the isothermal case
Calculating quantities defined by equations of state
we can represent system of Eqs. (25) in the form
Now we will derive a single equation for the internal variable \(\varphi \). For this purpose, Eq. (30) is differentiated with respect to time
Time derivatives of the internal variable \(\psi \) follow from Eq. (31)
At last, the internal variable \(\psi \) can be eliminated using again Eq. (30)
As a result, time derivatives of the internal variable \(\psi \) can be represented in terms of the internal variable \(\varphi \)
and the evolution equation for the internal variable \(\varphi \) has the form
After rearranging, we have finally
The free energy density W is non-negative by default, which results in non-negativity of material parameters B, C, D, and F. This means that Eq. (40) is the hyperbolic wave equation with dispersion and dissipation.
Thus, extending the state space of our thermodynamic system by an additional internal variable and keeping the quadratic form for the free energy density, we arrive at the hyperbolic evolution equation for the primary internal variable.
3 One-dimensional Thermoelasticity in Solids with Microstructure
Now we are ready to apply the dual internal variables approach to thermoelasticity in solids with microstructure. We will keep the one-dimensional setting to be as simple as possible. The 3D tensorial representation of the application of the dual internal variables approach is given in [18, 19].
3.1 Reminder: Classical Linear Thermoelasticity
The one-dimensional motion of the thermoelastic conductors of heat is governed by local balance laws for linear momentum and energy (no body forces)
and by the second law of thermodynamics
Here \(\sigma \) is the one-dimensional stress, v is the particle velocity, J is the entropy flux, subscripts denote derivatives.
The constitutive relations include the Hooke law
and the Fourier law
where \(\lambda \) and \(\mu \) are Lamé coefficients, \(\kappa ^{2}\) is the thermal conductivity. The entropy flux is proportional to the heat flux
The combined constitutive relation known as the Duhamel-Neumann equation has the form
where u is the displacement, \(c_{p}\) is the heat capacity, the thermoelastic coefficient m is related to the dilatation coefficient a and the Lamé coefficients \(\lambda \) and \(\mu \) by \(m = -a(3\lambda +2\mu )\), \(\theta _{0}\) is the reference temperature.
Correspondingly, the time derivative of internal energy
and entropy definition
yield in the balance of energy
which can be reduced for small deviations from the reference temperature to
The latter equation together with the balance of linear momentum
form the coupled system of equations for linear thermoelasticity.
3.2 Microstructure Influence: Dual Internal Variables
Now we suppose that the free energy density depends on internal variables \(\varphi , \psi \) and their space derivatives \(W=\overline{W}(u_{x},\theta , \varphi ,\varphi _{x},\psi ,\psi _{x}).\) We use a quadratic free energy function [9]
Here A, C, and D are material parameters. This means that state variables include strain, temperature, and two internal variables (and their gradients). For simplicity, only a contribution of the second internal variable itself and the gradient of the primary internal variable are included here. The corresponding equations of state determine macrostress \(\sigma \)
microstress \(\eta \)
zero interactive internal force \(\tau \)
and auxilary quantities related to the second internal variable
Accounting for the time derivative of internal energy
results in the energy balance in the form
which together with the second law of thermodynamics
determines the dissipation inequality
Including into consideration the non-zero extra entropy flux according to Eq. (22)
we reduce the dissipation inequality to the sum of intrinsic and thermal parts
Assuming that the intrinsic dissipation is independent of the temperature gradient, we are forced to modify the Fourier law as follows
to satisfy the thermal part of the dissipation inequality.
The remaining intrinsic part of dissipation inequality (63) is satisfied by a choice of evolution equations for internal variables. As it is shown in [9], the thermal influence of a microstructure can be taken into account by the following choice
where R and \(R_{2}\) are certain appropriate constants. This choice means that the intrinsic dissipation is partly canceled and its remaining part is the square with a positive coefficient.
It follows from Eqs. (65) and (57) that
i.e., the dual internal variable \(\psi \) is proportional to the time derivative of the primary internal variable \({\varphi }_{t}\). Then the evolution equation for the internal variable \(\psi \)
can be represented as
or in the following form (\(I=1/R^{2}D\))
which is a Cattaneo-Vernotte-type hyperbolic equation [5] for the internal variable \(\varphi \).
Correspondingly, energy balance (59) in this case has the form
Equation for macrotemperature (70) is influenced by a source term which depends on the internal variable \(\varphi \). This equation, as well as evolution equation for the internal variable \(\varphi \) (69) is coupled with the equation of motion [9]
which means that the internal variable \(\varphi \) possesses a wave-like behavior induced by the macrodeformation. Identifying the internal variable \(\varphi \) with the microtemperature [9], we see that the microtemperature may induce a wave-like propagation also for the macrotemperature due to the corresponding source term in heat conduction equation (70). Physically, the introduced microtemperature describes fluctuations about the mean temperature due to the presence of a microstructure.
4 Numerical Simulations
Now we will check the influence of microstructure on the thermoelastic wave propagation numerically. The solution of equations (69)–(71) in the case of plane wave motion in a thermoelastic half-space is obtained by means of the wave propagation algorithm explained in detail in [13]. We consider the matrix material as silicon and the microstructure is represented by copper particles embedded randomly in the matrix. Material parameters for silicon are the following [20]: the macroscopic density, \(\rho _{0}\), is equal to 2390 kg/m\(^3\), the Lamé coefficients \(\lambda =\) 48.3 GPa, and \(\mu =\) 61.5 GPa, the heat capacity, \(c_{p}=\) 800 J/(kg K), the reference temperature, \(\theta _{0}=\) 300 K, the thermal conductivity, \(k=\) 149 W/(m K), the thermal expansion coefficient, \(\alpha =2.6 \times 10^{-6}\) 1/K. Correspondingly, material parameters of copper are [21]: the macroscopic density, \(\rho _{0}\), is equal to 8960 kg/m\(^3\), the Lamé coefficients \(\lambda =\) 101.5 GPa, and \(\mu =\) 47.75 GPa, the heat capacity, \(c_{p}=\) 386 J/(kg K), the reference temperature, \(\theta _{0}=\) 300 K, the thermal conductivity, \(k=\) 401 W/(m K), the thermal expansion coefficient, \(\alpha =16.5 \times 10^{-6}\) 1/K.
The problem under consideration is the thermoelastic wave propagation induced by a thermal excitation at the boundary of the half-space. It is assumed that the material is initially at rest. Two consecutive heat pulses are generated at the traction free boundary plane for the first 120 time steps following the rule
The scale of excitation, \(U_{0}\), is chosen as 6 % of the length of the computational domain, L, so that \(U_0/L=0.06\). The scale of the microstructure, l, is supposed to be even less \(l/L=0.002\). Following [22] coupling parameters used in calculations are chosen as follows:
To exclude the direct influence of stress field on the macrotemperature, it was assumed that the velocity gradient in Eq. (70) is negligible.
All calculations were performed by means of the finite-volume numerical scheme [13] using the value of the Courant number 0.98. This scheme is a modification of the previously reported conservative finite-volume algorithm [23, 24] adapted for microstructure modeling. It belongs to a broad class of finite-volume methods for thermomechanical problems [25, 26].

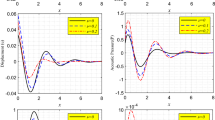
Normalized temperature, stress, and microtemperature distribution at 350 time steps
Results of calculations are presented in Fig. 1. This Figure demonstrates explicitly how the coupling in mathematical model (69)–(71) works. In the case of pure silicon we see only thermal diffusion in the vicinity of the boundary. The double pulse thermal excitation generates the corresponding stress pulses propagating through the material. If microstructure is taken into account, this stress pulses induce the microtemperature waves. The microtemperature affects the macrotemperature resulting in the oscillations of the macrotemperature hump with a fading thermal wake.
It should be noted that the scales for all quantities in Fig. 1 are different and chosen artificially to show all quantities in a single picture. The real effect of the microstructure is sufficiently small and can be made visible only by means of a corresponding zooming.
5 Conclusions
The dual internal variables approach leads naturally to a hyperbolic evolution equation for the primary internal variable. In the case of thermoelasticity, this internal variable can be interpreted as a microtemperature or, in other words, as a temperature fluctuation due to the microstructure. Coupling of the governing equations results in the wave-like temperature behavior.
Although the observed effect of the microstructure is small, it exists in the case of realistic values of material parameters. This effect can be amplified by a choice of suitable materials or even by a design of corresponding artificial materials.
It is remarkable that the governing equation for the macrotemperature remains parabolic. The wave-like temperature behavior appears only due to the influence of microstructure.
References
Mindlin, R.D.: Arch. Ration. Mech. Anal. 16(1), 51 (1964)
Capriz, G.: Continua with Microstructure. Springer, New York (1989)
Eringen, A.C.: Microcontinuum Field Theories. Springer (1999)
Forest, S.: J. Eng. Mech. 135(3), 117 (2009)
Joseph, D.D., Preziosi, L.: Rev. Mod. Phys. 61(1), 41 (1989)
Chandrasekharaiah, D.: Appl. Mech. Rev. 51(12), 705 (1998)
Ignaczak, J., Ostoja-Starzewski, M.: Thermoelasticity with Finite Wave Speeds. Oxford University Press (2009)
Straughan, B.: Heat Waves, vol. 177. Springer Science and Business Media (2011)
Berezovski, A., Engelbrecht, J., Maugin, G.A.: Arch. Appl. Mech. 81(2), 229 (2011)
Berezovski, A., Engelbrecht, J., Maugin, G.A.: J. Therm. Stress. 34(5–6), 413 (2011)
Tamma, K.K., Zhou, X.: J. Therm. Stress. 21(3–4), 405 (1998)
Berezovski, A., Engelbrecht, J., Ván, P.: Arch. Appl. Mech. 84(9–11), 1249 (2014)
Berezovski, A., Berezovski, M.: Acta Mech. 224(11), 2623 (2013)
Maugin, G.A.: Arch. Appl. Mech. 75(10–12), 723 (2006)
Maugin, G.: J. Non-Equilib. Thermodyn. 15(2), 173 (1990)
Horstemeyer, M.F., Bammann, D.J.: Int. J. Plast. 26(9), 1310 (2010)
Ván, P., Berezovski, A., Engelbrecht, J.: J. Non-Equilib. Thermodyn. 33(3), 235 (2008)
Berezovski, A., Engelbrecht, J., Maugin, G.A.: Arch. Appl. Mech. 81(2), 229 (2011a)
Berezovski, A., Engelbrecht, J., Maugin, G.A.: J. Therm. Stress. 34(5–6), 413 (2011b)
Hopcroft, M.A., Nix, W.D., Kenny, T.W.: J. Microelectromech. Syst. 19(2), 229 (2010)
Lienhard, J.H.: A Heat Transfer Textbook. Courier Corporation (2011)
Berezovski, A., Engelbrecht, J.: J. Coupled Syst. Multiscale Dyn. 1(1), 112 (2013)
Berezovski, A., Engelbrecht, J., Maugin, G.: Arch. Appl. Mech. 70(10), 694 (2000)
Berezovski, A., Maugin, G.: J. Comput. Phys. 168(1), 249 (2001)
LeVeque, R.J.: Finite Volume Methods for Hyperbolic Problems. Cambridge University Press (2002)
Guinot, V.: Wave Propagation in Fluids: Models and Numerical Techniques. Wiley (2012)
Acknowledgments
The research was supported by the EU through the European Regional Development Fund and by the Estonian Research Council project PUT 434.
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2016 Springer International Publishing Switzerland
About this chapter
Cite this chapter
Berezovski, A., Berezovski, M. (2016). Thermoelastic Waves in Microstructured Solids. In: Albers, B., Kuczma, M. (eds) Continuous Media with Microstructure 2. Springer, Cham. https://doi.org/10.1007/978-3-319-28241-1_9
Download citation
DOI: https://doi.org/10.1007/978-3-319-28241-1_9
Published:
Publisher Name: Springer, Cham
Print ISBN: 978-3-319-28239-8
Online ISBN: 978-3-319-28241-1
eBook Packages: EngineeringEngineering (R0)