
Abstract
This paperwork presents the evolution of depollution norms from Euro5 to Euro6 presenting at the same time the technologies used in order to meet their requirements and a comparative analysis of the NMVEG (New European Motor Vehicle Emissions Group) and WLTC (World Harmonized Light Vehicles Test Cycle) test cycles respectively, test cycles used in order to establish the level of polluting emissions for homologating the road vehicles equipped with thermal and hybrid engines, as well as for establishing the autonomy of the electric vehicles. Is also describes the new WLTC test cycles to be adopted in the EU (European Union) starting with the Euro6c depollution norm.
Access provided by Autonomous University of Puebla. Download conference paper PDF
Similar content being viewed by others

Keywords
Introduction
The climatic changes and the awareness on the damaging effects of the pollutants generated by the internal combustion engines have determined the international organizations to introduce legislative measures concerning the control of polluting emissions generated by road vehicles. Therefore, the American State of California announced the first regulations in 1961, then Japan in 1968, while the EU brought them up in discussion at the beginning of the 1970s, thus resulting “three major international norms” whose stages from the past 3 decades are schematically shown in Fig. 1.

Stages of the “three major international norms”
The challenge brought by the international organizations made that the evolution of the limits provided by the norms be updated every 4–5 years, thus preserving and improving the dynamic performances, and the reliability of the thermal engines, concomitant with the evolution of the depollution norms throughout the vehicles lifespan, which forced the automotive manufacturers to come up with new technologies in order to meet such limits, increasingly drastic. For the Euro norms, the technical development of the depollution systems faced several stages, each stage being associated to a certain norm from Euro1, Euro2, to Euro6, namely:
-
for vehicles with SI engines (Spark-Ignition engines)—Fig. 2;
Fig. 2 
Evolution of Euro norms for vehicles with SI engines
-
for vehicles with CI engines (Compression-Ignition engines)—Fig. 3.
Fig. 3 
Evolution of Euro norms for vehicles with CI engines


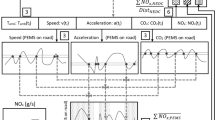
Nowadays, it is difficult to make a comparative analysis of the stringency of the regulations given that the test procedures and cycles are different (NMVEG for UE, JC-08 for Japan and FTP-75 for the USA) (Oprean 2003). In order to eliminate such shortcomings, UNECE (United Nations Economic Commission for Europe) proposed a new polluting emissions testing procedure for the light vehicles, called WLTP (Worldwide harmonized Light vehicles Test Procedure), procedure which shall adopt a new WLTC reference cycles, Fig. 4, to be implemented towards the end of 2017.

Types of test cycles for determining the polluting emissions (NMVEG, JC-08, FTP-75 and WLTC)
The WLTC (Worldwide harmonized Light-duty Test Cycle) cycle, Fig. 4, is the cycle dedicated to testing the light vehicles in order to establish the polluting emissions, being proposed to replace the current NMVEG cycle, and it represents the base of the new test procedure, a procedure initially proposed by the UNECE, to be implemented since 2017.
With regard to the test procedure, it imposes additional restrictions concerning the tests carried out on the dynamometric benches and of running resistance, ambient temperature, the fuel quality, the gearbox shifting, choosing the tyres model and tyres pressure, charging the storage battery, the total weight of the vehicle (including the optional pieces of equipment, the loading and number of passengers), etc.
The WLTC cycle comprises 4 stages (low speed, medium speed, high speed and very high speed) and depending on the PMR ratio (power-to-mass ratio) of the vehicles—where the rated power is expressed in W, idle running weight in kg, the following test classes were defined and shown in Table 1.
In continuation, Table 2, summarizes the main characteristics of the NMVEG and WLTC cycles.
To determine the characteristics of Table 2 were used the relations:
-
total time:
$$ T_{total} = t_{2} - t_{1} + \mathop \sum \limits_{i = 2}^{n} \left( {t_{i} - t_{i - 1} } \right) $$(1) -
total distance run:
$$ d_{total\;run} = \left( {t_{2} - t_{1} } \right)\frac{{v_{1}}}{3.6} + \mathop \sum \limits_{i = 2}^{n} \left( {t_{i} - t_{i - 1} } \right)\frac{{v_{i} }}{3.6} $$(2)where v i represents the vehicle’s speed in m/s for the time step i;
-
average speed (incl. stops):
$$ \dot{v}_{medium\;with\;stop} = 3.6\frac{{d_{total\;parc} }}{{T_{total} }} $$(3) -
average speed (excl. stops):
$$ \dot{v}_{medium\;no\;stop} = 3.6\frac{{d_{total\;parc} }}{{T_{total} }} $$(3’) -
max speed:
$$ v_{max} = max(v) $$(4) -
average acceleration:
$$ a_{medie} = \frac{1}{{T_{total} }}\mathop \sum \limits_{i = 1}^{n} a_{i} $$(5) -
maximum acceleration:
$$ a_{maxi} = max\left( {a_{i} } \right) $$(6)where a i represents the vehicle’s acceleration in m/s2 for the time step i, if a i > 0.
An important parameter requiring a particular attention when analysing a depollution cycle is the so-called relative positive acceleration or RPA (Relative Positive Acceleration) since it can provide data about how loaded is the respective cycle (http://siar.ro/wp-content/uploads/2015/06/RIA_35.pdf). The formula is given by the relation:
-
relative acceleration:
$$ RPA = \left( {\frac{1}{{d_{total\;parcursa} }}} \right)\mathop \sum \limits_{i = 1}^{n} \left\{ {\begin{array}{*{20}l} {\frac{{a_{i} v_{i} }}{3.6}} \hfill & { if\;(a > 0)} \hfill \\ 0 \hfill & {\left( {otherwise} \right)} \hfill \\ \end{array} } \right. $$(7)
Experiment
The case study is based on the upstream project study involving on identifying the operational points of the two cycles and the estimation of the polluting emissions for a vehicle equipped with a 1.5 dCI 81 kW Euro6 engine, using the simulation platform AMESim (Advanced Modelling Environment for Simulation of Engineering Systems).
The method of building the AMESim calculation model involves: generating an “ISO Camp” at the engine’s bench, choosing the model architecture—functional/dysfunctional (understanding the physical phenomena, defining the captors and actuators), creating and simplifying the model (formal—linear or nonlinear model), validation based on the initial test at the engine’s bench.
As far as the WLTC cycle is concerned, during simulation, just like when testing a vehicle on the roller bench, an important aspect is represented by the calculation of the time when shifting the velocity steps for each vehicle, which is a new aspect as compared against the NMVEG cycle, where the time for shifting the velocity steps is fixed. The purpose is to reflect the practical use and an efficient driving behaviour (low fuel consumption). The indications related to the shifting of the velocity steps per WLTC cycle are based on the balance between the power necessary to overcome resistances to advance in acceleration and the power supplied by the engine in all gears ratio possible, in a specific phase of the driving cycle.
The power necessary is calculated for each second i of the speed profile of the cycle, considering the power required in order to overcome the resistances to advance and provided that the vehicle accelerates using the relation 8:
where:
- f 0 :
-
the load factor, represents the advanced resistance cauzed by the contact between the tyre and the rolling track (N);
- f 1 :
-
the load parameter, represents the frictions with in the kinematic chain of the transmission depending on speed [N/(km/h)];
- f 2 :
-
the load coefficient, represents the stressed caused by the aerodynamic resistance depending on the squared speed [N/(km/h)2];
- P required,i :
-
the power necessary in kW at second i;
- a i :
-
vehicle acceleration at the second i, \( with\;a_{i} = \frac{{v_{i + 1} - v_{i} }}{{3.6 \cdot \left( {t_{i + 1} - t_{i} } \right)}} in\; {{\text{m/s}}^{ 2} } \;and\;t{---}time\;in\;{\text{s}}; \)
- v i :
-
vehicle speed at the second i in km/h;
- m t :
-
the vehicles mass in kg;
- k r :
-
coefficient that considers the inertial resistance values from the running gear during acceleration.
Description of the model: In order to study the influence of the transition from the NMVEG cycle at the WLTC cycle, the realization of the AMESIm simulation involve to model a vehicle equipped with a CI engine (compression ignition engine) turbocharged, a clutch, a gearbox, the after-treatment system exhaust (DOC—Diesel Oxidation Catalyst, NOx-Trap and DPF—Diesel Particulate Filter) and the cycles profiles (where the WLTC cycle should be defined in terms of speed and time-based ratio). The model also includes the basic accessories, he starter and the alternator, Fig. 5.

A drawing of the proposed model
Since, in the event of using the HIL (Hardware in the Loop) model, we are constrained by the calculation time of the model in order to run in real time, we have used the DRVICE01D component (Driver internal combustion engine), a function specific for AMESIM which uses 8 files as inputs (necessary to be known and parameterized):
-
the engine torque is calculated from the cartography “torque.data” or “BMEP.data” in inside the model and the engine temperature impact is taken into account by using the water temperature or the oil temperature and the “FMEP.data” file, after relation 9:
$$ T = T_{table} + T_{{losses,T_{hot} }} - T_{losses,temp} $$(9)where:
- T :
-
means the corrected torque (Nm);
- T table :
-
means the torque (Nm) taken from the cartography “torque.data”;
- T losses :
-
means the friction torque (Nm) at hot engine temperature T hot taken from the cartography “FMEP.data”;
- T hot :
-
means the parameter “hot engine temperature” (°C);
- T losses,temp :
-
means the friction torque (Nm) at water temperature or oil temperature taken from the Table 1D “FMEP.data” (temp = T water or temp = T oil);
- T water :
-
means the temperature of the water coming through the port 7 (°C);
- T oil :
-
means the temperature of the oil through the port 8 (°C).
-
at the end, a correction is applied on the output torque during the acceleration stages, in order to consider the environment conditions, as follows, relation 10:
$$ T_{out,1} = T_{dyn} \cdot \frac{{\rho_{air} }}{1.205} $$(10)with:
- T out,1 :
-
output torque at port 1 (Nm);
- T dyn :
-
dynamic engine torque (Nm);
- ρ air :
-
air density (kg/m3).
-
for the output torque, the brakes medium effective pressure (BMEP) is calculated using the relation 11:
$$ BMEP = \frac{{4 \cdot \pi \cdot T_{out,1} \cdot 10^{ - 2} }}{V} $$(11)where:
- BMEP :
-
means the Brakes Medium Effective Pressure (bar);
- T out,1 :
-
means the torque at the engine shaft (Nm);
- V :
-
means the engine’s cylinder capacity (L).
-
in the end, the real power is calculated using the relation 12:
$$ P = T_{out,1} \cdot \omega \cdot 10^{ - 3} $$(12)where:
- P :
-
means the real power (kW);
- T out,1 :
-
means the torque at the engine shaft (Nm);
- ω :
-
means the angular speed at the shaft (rad/s).
Results and Explanation
In order to validate the results, compliance with the speed profile on the roller bench is an important criterion in declaring the test as valid or invalid, the accepted tolerance being of ±2 km/h (or 0.56 m/s) at ±1 s. Both in Fig. 6 (simulated NMVEG cycle), and in Fig. 7 (simulated WLTC cycle) it could be noticed that this condition is fulfilled, therefore we can further analyse the results.

Speed simulation in NMVEG cycle

Speed simulation in WLTC cycle
Considering the dynamics of the WLTC cycle, where the speeds and accelerations are significantly higher to the NMVEG cycle, there was a first comparative analysis between cycles made in Table 3 over the CO2 emissions, emissions that render the fuel consumption bigger picture. The simulation results show that, although the WLTC cycle is more severe from the point of view of the speed—and loading respectively, the cumulated CO2 emissions generated by the engine are approximately 103 % higher for the WLTC cycle, fact explained by the longer distance run ~23 km, the global emissions of the engine expressed in g/km remained at the same level or even dropped by ~2 %.
The logical explanation for which the CO2 emission on the WLTC cycle are the same as on the NMVEG cycle is given by the fact that, although the engine load is higher on the WLTC cycle, the engine exploitation does make in an optimum operating condition close to the economical pole of the engine, where the range of operational points of the WLTC cycle is higher than the operational points of the NMVEG cycle. This fact is confirmed by the chart in Fig. 8, where the characteristic speed-torque in the WLTC cycle is at the edge of maximum torque generated by the engine, the manufacturer having the freedom to calculate the moment for shifting the velocity steps for each vehicle.

Engine torque characteristic—operational points
For the particles emissions, Table 4, the shifting to the WLTC cycle faced a growth of the cumulated emissions by relatively up to 433 %, caused by violent accelerations, which lead to a richness >0.6 (richness = 1/lambda)—where the growth of the particles emissions becomes exponential, and a relative growth of 160 % of the global emissions, however, the limits of the Euro6c norm is met due to the DPF (Diesel Particulate Filter) technology, whose efficiency reached up to 99 %. Although the norm limits are met, increasing the loading speed by 160 % leads to triggering more frequent regenerations, reason for which special attention should be given when calibrating the Diesel engines and recalculating the Ki (regenerative coefficient), or re-dimensioning the DPF.
The analysis of NOx (Nitrogen Oxides), Table 5, shows an important degradation of the cumulated emissions, of approximately 350 % in relatively, degradation caused particularly by the higher temperatures (over 2000 K) in the combustion room, because of the higher charge in the WLTC cycle. In this particular case, although the simulation was made with an engine whose DT (Technical Definition) complied with the Euro6b norm (Cata + NOx-Trap and DPF), we could notice that the norm provisions were met for the NMVEG cycle, but not for the WLTC cycle, therefore, a re-optimization of the calibration as well as of the NOx-Trap re-dimensioning might be considered.
For HC emissions (unburned hydrocarbons)—Table 6 and CO emissions (Carbon Monoxide)—Table 7, the norm is complied with. We even notice an improvement of the HC emissions by approximately 20 %, and the same level of CO emissions in the WLTC cycle, according to ISO standards, this fact being explained by a quicker heating of the catalyser given the high loads throughout the WLTC cycle.
Conclusions
The evolution of the depollution norm from Euro5 to Euro6 involves reduction of the NOx polluting emissions limits (0.18–0.08 g/km) only for the vehicles equipped with CI engines, however, the stringency of the Euro6c norm is given by the new type of WLTP test procedure and the new type of WLTC cycle adopted;
As far as the are CO2 emission, for the studied engine, although the WLTC cycle shows a higher constraining from the loading point of view, the global CO2 emissions expressed in g/km remained at the same level, with even a slight decrease;
The engine speed torque characteristic for the WLTC cycle is at limit between of the maximum torque delivered by the engine, thus rendering the engine to operate on optimum operating points close to economical pole of the engine, where the engine efficiency is optimum;
Although the norm limits are met for the particles emissions, increasing the loading speed leads to triggering more frequent regenerations, reason for which special attention should be given when recalculating the Ki factor (regenerative coefficient).
Considering the simulation results, there might be considered a re-optimization of the calibration from the MAP (Mise au point) point of view, as well as a NOx-Trap re-dimensioning in order to comply with the Euro6c norm in relation to the emissions of nitric oxides.
With regard to the HC/CO emissions, the WLTC cycle shows zero non-conformity risks, with “iso” CO emissions, being favourable for reducing the HC emissions given of a high load on cycle, which leads to the quick heating of the catalyser.
Reference
Oprean IM (2003) Modern automobile. Romanian Academy Publishing House, Bucharest
Acknowledgements
The results presented in this article were obtained with the support of the Ministry of European Funds through the Sectorial Operational Program for Human Resources Development 2007–2013, Contract No. POSDRU 187/1.5/S/155420.
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2016 Springer International Publishing Switzerland
About this paper
Cite this paper
Bancă, G., Nişulescu, V., Frăţilă, G. (2016). Aspects Regarding the Evolution of the Depollution Norms and Test Cycles in Order to Determine Polluting Emissions. In: Andreescu, C., Clenci, A. (eds) Proceedings of the European Automotive Congress EAEC-ESFA 2015. Springer, Cham. https://doi.org/10.1007/978-3-319-27276-4_57
Download citation
DOI: https://doi.org/10.1007/978-3-319-27276-4_57
Published:
Publisher Name: Springer, Cham
Print ISBN: 978-3-319-27275-7
Online ISBN: 978-3-319-27276-4
eBook Packages: EngineeringEngineering (R0)