
Abstract
An original operation principles and patented block diagrams for sonar equipment’s improvement, such as, sonic direction and range finder, acoustic measurement pulse tube , etc. without complication of reversible interference antenna’s design, are present in this chapter. Engineering results can be obtained by means of reception and processing of the “new” sounding echo-signals, i.e. the phase-coupled multiple high-harmonic components \( 2f,3f, \ldots ,nf \) of finite amplitude pump wave with fundamental frequency f generated due to self-action of the radiating pump wave ’s propagation in nonlinear water medium. The extension of frequency band by additional registration of higher harmonic’s echo-signals magnitude allows realizing the original broadband echo-ranging systems with reversible interference antenna’s adjustable angular resolution. Phase synchronism and frequency multiplicity of several acoustical signals (\( f,2f,3f, \ldots ,nf \)) allows designing the equipment for an acoustical reflection/transmission factor’s broadband measurements (pulse tube method) for the plane baffle blankets, which operation principle and block diagram are considered.
Access provided by Autonomous University of Puebla. Download conference paper PDF
Similar content being viewed by others

Keywords
These keywords were added by machine and not by the authors. This process is experimental and the keywords may be updated as the learning algorithm improves.
1 Introduction
There are known the results of acoustic multiple signal’s experimental investigation of self-action regime for active sonar equipment, including the single-beam fish-finding device “Taimen-M”, the echo-sounders with navigating mode «Sargan-K, EM, GM», etc. [1, 2].
The directivity patterns of the “Taimen-M” sonar’s reversible hydroacoustic interference antenna are represent by diagrams at the Fig. 47.1, where z = 3 m and 2a = 0.2 m are the distance to hydrophone at the acoustic axis and diameter of planar antenna appropriately. An angular distributions of multiple signal’s sound pressure amplitude has been registered for two regimes: «linear» regime, antenna’s direct driving at frequencies \( f = 50{\text{ kHz}},\,2f = 100{\text{ kHz}},\,3f = 1 50{\text{ kHz}}\,( * ) \) by turn and «nonlinear» regime, design mode antenna’s excitation at frequency \( f = 50{\text{ kHz}} \), which set to nonlinear generation in water high harmonics \( 2f,3f(\nabla ) \).

Beam patterns of “linear” and “nonlinear” regimes for the “Taimen-M” sonar’s reversible interference antenna [1]
Thus, the “Taimen-M” sonar’s interference antenna possess (∇) the “nonlinear” regime: at frequency \( f = 50{\text{ kHz}} \), beam width \( \theta_{0.7(f)} = 1 4. 4^\circ \) and sidelobe \( P_{sl(f)} = - 19\,{\text{dB}}; \) at frequency \( 2f = 100{\text{ kHz,}}\,\theta_{0.7(2f)} = 10. 8^\circ \), and \( P_{sl(2f)} = - 23\,{\text{dB}} \); at frequency \( 3f = 1 50{\text{ kHz}},\,\theta_{0.7(3f)} = 8. 1^\circ \) and \( P_{sl(3f)} = - 23\,{\text{dB}}; \) (*) the “linear” regime: antenna’s direct driving at frequency \( f = 50{\text{ kHz}} \), beam width \( \theta_{0.7(f)} = 1 4. 4^\circ \) and sidelobe \( {\text{P}}_{sl(f)} = - 19\,{\text{dB}}; \) at frequency \( 2f = 100{\text{ kHz}},\,\theta_{0.7(2f)} = 7. 2^\circ \) and \( {\text{P}}_{sl(2f)} = - 19\,{\text{ dB}}; \) at frequency \( 3f = 1 50{\text{ kHz,}}\,\theta_{0.7(3f)} = 4. 8^\circ \) and \( P_{sl(3f)} = - 1 8\,{\text{dB}}. \)
As follows from represented measurement data for “linear” radiation regime the sidelobes of angular distributions are without changing, while main beam width decreased in accordance with the prominent physical law. Acoustic fields of high harmonics \( 2f,3f, \ldots nf \) possess interesting spatial capabilities: at antenna’s acoustic axis the nonlinear variation of water elastic properties under ultrasonic radiation of high-power pump waves on fundamental frequency f has occurred much greater, in connection with which the width of main lobes for next following harmonic component becomes also narrow. This phenomena at directions of sidelobes occur much lighter, what define the reduction of high harmonic component’s generation efficiency, as a result the sidelobe’s levels for next following harmonic component become also smaller wherewith previous.
2 The Multifrequency Navigation System
There is a great need within the area of off-shore marine extraction of oil and gas technology to design the special multifrequency hydroacoustic systems for the navigation and surveillance, which provide the vessel’s safety sailing and maneuvering on the navigable paths, mouth and narrowness of harbors, channels, convergence with drilling platform, etc.
Gage subsystem is composed of the acoustic shipborne devices for sonic location and range of underwater wells equipped by the sonar beacon-pingers, but moreover often observation accuracy and noise immunity occurs insufficient. These difficulties are partially solved by application of the multifrequency sonic direction and range finder, which allows detecting with required accuracy position (bearing and distance) of the powerful source of finite amplitude acoustic waves—sonar beacon-pinger [3, 4].
There is an acoustic subsystem based on angular direction measurements on the bottom beacon at vertical planes transient on axes X and Y of ship’s reference system by means of two acoustic arrays, apetalous directional patterns offset one about another on some angle, which forms sonar equisignal zone. This apparatus allows one to take the bearing on the beacon by phase-amplitude method as consistent with it at alignment of the sonar boresight with the bearing on an acoustic pinger. An output error signal from difference block of device is equal to zero, as soon as misalignment of this direction gives rise to appear phase displacements of receiving signals from acoustic arrays. Thus, it is known that sign and variation value of phase displacement depend from magnitude and direction of deflection angle.
Electric error signal in compliance with phase displacement converted to control signal, which supply total mechanical rotation of acoustic arrays until the value of this signal is disappeared. Thus, continuous automatic tracking by means of taking the bearing of acoustic beacon is provided. Unfortunately, the described acoustic subsystem suffers from grave shortcomings. There are modest accuracy of taking the bearing of acoustic bottom beacon, impossibly the range measuring for sound source and necessity of acoustic arrays mechanical turning at the direction finding.
The multi-frequency sonic direction and range of finder functioning occurs in the following way. Electronic units of acoustic beacon-pinger turned on power supply 1 and driving oscillator 2 daisy-chained to chronizator-modulator 3, power amplifier 4 and electroacoustic transducer 5 (see Fig. 47.2). Electroacoustic transducer radiates in nonlinear medium an acoustic sine pulse signal of finite amplitude with sound pressure amplitude P 1 at fundamental frequency f. During its spreading, the saw-tooth distortion of acoustic wave shape will take place, i.e. generating process of higher harmonic components occurs at frequencies \( 2f,3f, \ldots ,nf \) of acoustic pressure, amplitudes of which are equal \( P_{2} ,P_{3} , \ldots ,P_{n} \) [5].

Multi-frequency sonic direction and range finder’s block scheme [3]
An acoustic beacon-pinger can radiate at specified program and may operate until mounting on to the bottom. There are two n-ported reception paths of vessel’s aboard receiving apparatus, in which process the electric signals \( U_{1} ,U_{2} \) from two groups of acoustic transducers 6, 7 process. Both groups of acoustic transducers 6, 7 have the same direction patterns without supplementary lobes, which be away one from other on angle \( 2\varphi_{\text{cm}} \) (Fig. 47.3a), where \( \varphi_{\text{cm}} = \left( {0. 5{-}0. 7} \right)\theta_{0,7f} ,\,\theta_{0.7f} \) is the directivity pattern width of each group of acoustic transducers at pump signal. The equisignal-zone method of direction finding can be realized by means of voltage difference determination \( \Delta U = U_{1} - U_{2} \) (-◦1′, 2′, -▫1′′, 2′′ in Fig. 47.3a) at the outputs of two identical electric processing channels of both reception paths. Electric signals at frequencies of operation “-” or f, or \( 2f\, \ldots , \) or nf, magnitudes of which are depend of acoustic arrays disposition, what may be specified by tuning callfinding characteristics of equisignal of compensation circuit 8. Retuning of compensation circuit 8 may be carried out as operator manually as well as automatically with subsequent monitoring at the direction on the electroacoustic transducer 5 of acoustic beacon-pinger. If the acoustic beacon-pinger is on the line passing through the intersection point of directivity patterns of two groups of acoustic transducers 6, 7 (it calls the boresight line direction), electric signals of both channels are equal (\( U_{1(f)} = U_{2(f)} \,{\text{or}}\,U_{1(2f)} = U_{2(2f)} \ldots \)). Voltage difference \( \Delta U \) is equal zero, what is indicated by data display unit 16, which shows information about angular coordinate \( \Delta \varphi \) taking the bearing on the radiated electroacoustic transducer 5 of acoustic beacon-pinger.

Equisignal-zone method of direction finding (a) and steepness of direction-finding characteristic (b) at operating signals: pump (f) and second harmonic component (2f) [3]
There are several acoustic signals as primary at frequency f as well as generated acoustic fields with frequencies \( 2f, \ldots ,nf \). They allow one to regulate the precision of acoustic beacon-pinger direction finding. Direction-finding characteristics of equisignal-zone method on frequencies f(- - -), 2f(-. -. -.) for this facility are present in Fig. 47.3b. It is clear from the figure, that steepness of direction-finding characteristic \( S = {{dU(\varphi )} \mathord{\left/ {\vphantom {{dU(\varphi )} {d\varphi }}} \right. \kern-0pt} {d\varphi }} \) and therefore direction finding highest possible sensitiveness coincides with the orientation of boresight line direction on the electroacoustic transducer 5 of acoustic beacon-pinger (in this case, \( \Delta U = 0 \)). Therefore, for second harmonic component signal (2f), the direction of finding sensitiveness is higher than for fundamental frequency signal. This fact depends of voltage difference magnitude \( \Delta U = U_{1} - U_{2} \) (-◦1′, 2′, \( \Delta U_{f} \); -▫1′′, 2′′, \( \Delta U_{2f} \)) for every angular deflection \( \Delta \varphi \) from boresight line direction, what is defined by sharpening of directivity pattern of each group of acoustic transducers in the receipt mode for higher-frequency signals. An angular deflection \( \Delta \varphi_{\hbox{min} (nf)} \) from boresight line direction by which operator or else automatic facility confidently set the presence of voltage difference \( U_{1(nf)} ,U_{2(nf)} \) expresses by the formula [6]:
where \( \mu = (0.0 5- 0. 1 5) \) or \( \mu \ge 0. 2 \) at operator’s direction finding by means of visual or ear indicator, respectively, \( \theta_{0.7(nf)} \) are the directivity pattern widths of each group of acoustic transducers at operation signal. Thus, utilization of several operating signals, namely the pump (f) and higher harmonic components (nf) at multi-frequency passive navigation system, which are processed in the n dual-link electric circuits consists of connecting in series band-pass filters 9 tuned up on the frequencies \( f,2f, \ldots ,nf \), amplifiers 10 and detectors 11. Output signals in pairs of same frequencies f or 2f or \( \ldots nf \) over two n-ported analog commutators 12 are given for two inputs of subtractor 13, output of which is connected with the second input of data display unit 16. This signal processing allows one to realize the acoustic beacon-pinger’s direction finding by means of the equisignal-zone method with required precision, which increase for higher-frequency signals due to the decreasing of directivity pattern widths of each group of receiving array’s acoustic transducers at operation signal. The choice of this or another operating signal be carried out by means of giving the signal from the output of control unit 17 to control inputs of two n-ported analog commutators 12, what in this case is determined by necessary precision of ship’s sound fixing and range of bottom sonar beacons. Videoimpulse signals \( U_{2(f)} ,U_{2(2f)} , \ldots ,U_{2(nf)} \) from outputs of detectors 10 of second reception path enter to the inputs of amplitude measuring devices 14, which register signal’s amplitudes on fundamental f and higher harmonic components nf for the moment of precise direction finding. The ratio of signal’s levels \( U_{2(f)} ,U_{2(2f)} , \ldots ,U_{2(nf)} \) (and so to sound pressure amplitudes \( P_{1} ,P_{2} ,P_{3} , \ldots ,P_{n} \)) by means of computing unit 15 allows one to determine the range z up to the sonar beacon-pinger. Output of computing unit 15 connects with the third input of data display unit 16. Control inputs of data display unit 16, computing unit 15 and amplitude measuring devices 14 connect with the corresponding outputs of control unit 17.
There is the derivation of formula for calculation of range z up to taking the bearing of finite amplitude signal of acoustic source by means of three-frequency passive navigation system modification. It is utilized for suitable processing by means of computing unit 15 of the videoimpulse signals \( U_{2(f)} ,U_{2(2f)} ,U_{2(3f)} \). These signals correspond to sound pressure amplitudes \( P_{1} ,P_{2} ,P_{3} \) acoustic signals of fundamental frequency f and higher harmonics \( 2f,3f \) and are received by the one group of acoustic transducers 7. An amplitude ratio of sound pressure amplitudes \( P_{1} ,P_{2} ,P_{3} \) acoustic signals of fundamental frequency f and higher harmonics \( 2f,3f \) are well-known [7]:
where k is a nonlinear parameter (for water k = 7), z is the propagation distance of acoustic signal, \( \beta_{1,2,3} \) is the attenuation (neper/meter) of acoustic signal with frequencies f, 2f, 3f; ρ is the density of propagation medium (for water 1000 kg/m3), c is the speed of wave propagation (for water 1500 m/s), P 0 is the sound pressure amplitude of acoustic signal of fundamental frequency f, reduced to the distance z 0 = 1 m from the surface of bottom beacon-pinger electroacoustic transducer 5.
Then, one can express \( P_{0} z_{0} \) by using expression (2) and put it into (3) \( {{P_{3} P_{1} } \mathord{\left/ {\vphantom {{P_{3} P_{1} } {P_{2}^{2} = 3\{ \exp [ - z(\beta_{1} + \beta_{3} - 2\beta_{2} }}} \right. \kern-0pt} {P_{2}^{2} = 3\{ \exp [ - z(\beta_{1} + \beta_{3} - 2\beta_{2} }})]\} /2(\ln z - \ln z_{0} ). \) For distance z 0 = 1 m, we obtain \( \ln z = 1.5\exp [ - z(\beta_{1} + \beta_{2} - 2\beta_{2} )]P_{2}^{2} /(P_{3} P_{1} ) \). Thus, exponentiation of expression gives us the following transcendental equation:
It is possible by means of microprocessor hardware to solve the transcendental (47.4) for different values of initial parameters \( f,\beta (f),P_{1} ,P_{2} ,P_{3} \), what allows us to determine unambiguously the range z to taking the bearing for bottom acoustic beacon-pinger.
3 An Impulse Method for Broad-Band Acoustical Measurements
High-frequency measurements at (3–100) kHz and (0.5–3) kHz are important, respectively, in marine technology and aero-acoustics in processes of construction of specialized materials in order to apply an acoustic windows, absorbers or transmission loss systems. The restriction of measuring frequency range by pass band of radiating acoustic transducers and accuracy in determining the modulus and phase of complex acoustic reflection factor for tested material surface are the main difficulties in the gaging of acoustic impedance and material characterization.
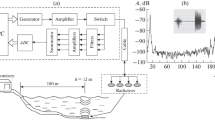
Benefits which may be derived from using an improved pulse tube method are undoubted: system proposed uses a convenient technique (radiated and reception paths, temperature controlled water tank, etc.) for acoustic studies, the frequency band extension increases in 2n times, where n is the even number of applied high harmonic [8]. The schematic diagram of proposed technique is present in Fig. 47.4. Figure 47.5 indicates the voltage waveforms of electrical schematic. The transducer 1 is installed into pulse tube 14 and it radiates in nonlinear medium 2 (water, air, etc.) an acoustic sine pulse signal of finite amplitude U1 at fundamental frequency f. During it’s spreading, because of nonlinear self-action the saw-tooth distortion of acoustic plane wave shape U2 will take place, i.e., generation of higher harmonic components at frequencies \( 2f,3f, \ldots ,nf \) [5]. All harmonic components of signal U2, having phase synchronism with each other, reach the surface of the tested material 3 and reflect from it. Incident and reflected multi-frequency acoustic pulses U2 and U5, respectively, are received by single acoustic probe 4, and then filtered (blocks 5, 6, 7, …) into harmonic components at frequencies \( f,2f,3f, \ldots ,nf \) (electric signals U6, U7, U8, …), which correspond to the incident (U6′, U7′, U9′, …) and reflected (U6″, U7″, U9″, …) phased multiple acoustic signals. An acoustic pulse signal U1 may include (6–10) sine periods of fundamental frequency, varying in measurements at one octave (f–2f) range. A single acoustic probe 4 situates on an axis of pulse tube near the surface of sample 3, thus, the incident and reflected waves are spatially separated. If R ≫ L, the attenuation in medium 2 at the distance 2L is negligible, and diffraction divergence of acoustical waves does not occur, when the measurements take place in an acoustical tube 14. Thus, signals \( U2\, \approx \,U3,U4 \approx U5 \) and signal amplitude ratio U6″/U6′ = |Ќ (f)|, U7″/U7′ = |Ќ(2f)|, will equal to the complex module of acoustical reflection factors for corresponding frequency components \( f,2f, \ldots nf \).

Block-scheme of device [8]

Electric scheme’s voltage waveforms [8]
To measure the phase shifts after reflection from the investigated material surface of each harmonic components \( f,2f,3f, \ldots ,nf \) for multifrequency signals (incident U2 and reflected U5) it is necessary to receive several auxiliary support signals with same frequencies. In order to achieve this purpose an electric signals \( U6,\,U7, \ldots , \) corresponding to acoustic harmonics with frequencies \( f,2f,4f,8f, \ldots \) are multiplied by the frequency (blocks 8, 9…) by m times, where m equals to the ratio of two neighboring frequency components (m = 2). Thus, values of phase shifts between electric signals of the same frequencies (higher-frequency harmonic components \( U7,U8, \ldots \) and auxiliary support signals \( U9,U10, \ldots \)) determine for incident U2 and reflected U5 by means of phasometers 10, 11,…12.
So, for the considered phased multiple acoustic signals of fundamental frequency f and its second harmonics 2f, we may write
where \( \varphi_{ 1} ,\varphi_{ 2} \) are values of the phase shifts for acoustical signals at frequencies f and 2f after reflection from tested material 3, 2Lω/c is the current phase increase of acoustical signal because of a double spreading at the distance L, c is the acoustic wave propagation speed in the medium 2. After multiplying signal U6′, U6″ frequency by 2 times (block 8) we have
Phase differences ψ 1 and ψ 2 between signals U9′ and U7′, and signals U9″ and U7″, respectively, will be equal \( \psi_{ 1} = { 2}\alpha_{ 1} - \alpha_{ 2} ,\psi_{ 2} = { 2}\alpha_{ 1} - \alpha_{ 2} + { 2}\varphi_{ 1} - \varphi_{ 2} = \psi_{ 1} + { 2}\varphi_{ 1} - \varphi_{ 2} \). Whence \( \varphi_{ 2} = \psi_{ 1} - \psi_{ 2} + { 2}\varphi_{ 1} ,\psi_{ 1} ,\psi_{ 2} \) are the values, which are successively measured by phasometer 10. Therefore, let the dependence for phase shift φ1 of the module of complex sound pressure reflection factor Ќ(f) is known for the surface of material at one octave (f–2f) frequency band. Then simultaneous application in accordance with the described method of the second harmonic 2f of acoustic finite amplitude signal makes it possible to obtain additionally the dependence for the phase shift φ 2. Moreover, we can obtain the modulus of complex sound pressure reflection factor Ќ(2f) for the surface of material in the frequency range (2f–4f), and when a higher harmonic 4f is applied, we can obtain the modulus at the frequency range (4f–8f), etc.
Similarly, one can test the acoustical transmission factor through different materials. For this, electrical signals U6″, U7″ are received from single acoustical probe 13, located behind the layer of material.
4 Conclusion
The chapter presents an original sonar equipment improved development, consisting in an extension of operating frequency band without complication of acoustic antenna’s design. This carried out by means of reception and processing of echo-signal amplitude and phase characteristics of generated in nonlinear water medium coupled multiple high harmonic components \( 2f,3f, \ldots ,nf \) of finite amplitude pump waves with fundamental frequency f. For example, upgrading the echo-sounders with navigating mode «Sargan-EM» can extend its operating capacity: echo-ranging at five operating frequencies (19.7, 39.1, 59.1, 135, 270) kHz allow changing the beam width by 10 times and detecting the singleton/stock of fish at depths of 500 m/1700 m [1].
References
V.J. Voloshchenko, The Fish-Finding Echo-Sounder Based on the Self-action of Nonlinear Effect: Upgraded Prospect (LAP LAMBERT Academic Publishing GmbH & Co. KG, Germany, 2012) https://www.ljubljuknigi.ru/store/ru/book/isbn/978-3-659-11100-6, (In Russian)
V.J. Voloshchenko, The Parametric Echo-Sounders for Short-Range Underwater Surveillance (LAP LAMBERT Academic Publishing GmbH, Omni Scrip. & Co. KG, Germany, 2015) https://www.ljubljuknigi.ru/store/ru/book/isbn/978-3-659-48014-0, (In Russian)
V.Y. Voloshchenko, Acoustic Direction Finder. Russian patent No. 2138059 (RU), 20 Sept 1999 (In Russian)
V.Y. Voloshchenko at el., Multi-frequency Navigation System. Russian Patent No. 86321 (RU), 27 August 2009 (In Russian)
T.G. Muir, in Physics of Sound in Marine Sediments, p. 241, ed. by L.L. Hampton, Non-linear Acoustics and Its Role in the Sedimentary Geophysics of the Sea (Plenum Press, New York, 1974)
A.E.Kolesnirov (ed.), in Handbook on the Hydroacoustics, Sudostroenie, 1982 (In Russian)
O.H. McDaniel, J. Acoust. Soc. Am. 38(4), 644 (1965)
V.Y. Voloshchenko et al., Apparatus for Measuring the Sound Pressure Reflection Factor of Samples. USSR Author Certificate on Invention, No. 1196754, 7 Dec 1985 (In Russian)
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2016 Springer International Publishing Switzerland
About this paper
Cite this paper
Voloshchenko, V.Y. (2016). The Multifrequency Sonar Equipment on the Self-action Nonlinear Effect. In: Parinov, I., Chang, SH., Topolov, V. (eds) Advanced Materials. Springer Proceedings in Physics, vol 175. Springer, Cham. https://doi.org/10.1007/978-3-319-26324-3_47
Download citation
DOI: https://doi.org/10.1007/978-3-319-26324-3_47
Published:
Publisher Name: Springer, Cham
Print ISBN: 978-3-319-26322-9
Online ISBN: 978-3-319-26324-3
eBook Packages: Physics and AstronomyPhysics and Astronomy (R0)