
Abstract
Current monitoring solutions are not well suited to monitoring large data centers in different ways: lack of scalability, scarce representativity of global state conditions, inability in guaranteeing persistence in service delivery, and the impossibility of monitoring multi-tenant applications. In this paper, we present a novel monitoring architecture that strives to address these problems. It integrates a hierarchical scheme to monitor the resources in a cluster with a distributed hash table (DHT) to broadcast system state information among different monitors. This architecture strives to obtain high scalability, effectiveness and resilience, as well as the possibility of monitoring services spanning across different clusters or even different data centers of the cloud provider. We evaluate the scalability of the proposed architecture through an experimental analysis and we measure the overhead of the DHT-based communication scheme.
Access provided by Autonomous University of Puebla. Download conference paper PDF
Similar content being viewed by others


Keywords
1 Introduction
Cloud Computing is the most adopted model to support the processing of large data volumes using clusters of commodity computers. According to Gartner, Cloud Computing is expected to grow 19 % in 2012, becoming a $109 billion industry compared to a $91 billion market last year. By 2016, it is expected to be a $207 billion industry. This esteem compares to the 3 % growth expected in the overall global IT market. Several companies such as Google [1], Microsoft [2], and Yahoo [3] process tens of petabytes of data per day coming from large data centers hosting several thousands nodes. According to [4], from 2005 to 2020, the digital universe will grow by a factor of 300, from 130 EB to 40000 EB, or 40 trillion GB (more than 5200 GB per person in 2020). From now until 2020, the digital universe will about double every two years.
In order to satisfy service level agreements (SLAs) and to keep a consistent state of the workflows in this tangled layout, such growing large infrastructures are usually monitored through a multitude of services that extract and store measurements regarding the performance and the utilization of specific hardware and software resources. These monitoring tools are operated by cloud providers and offered to the services’ owners, but also ad-hoc monitoring solutions are designed in order to satisfy the requirements of big companies which own their private cloud infrastructures. For example, Sony uses the closed-source Zyrion Traverse database [5] to claim the monitoring of over 6000 devices and applications over twelve data centers across Asia, Europe and North America. The virtual data layer within the solution collects half a million resource data streams every five minutes.
This scenario requires the design of an advanced monitoring infrastructure that satisfies several properties:
-
1.
Scalability. It must cope with a large amount of data that must be collected, analyzed, stored and transmitted at real-time, so as to take timely corrective actions to meet SLAs.
-
2.
Effectiveness. It must provide an effective view of the system state conditions that can be used for management purposes and to identify the causes of observed phenomena. It must also adapt its monitoring functions to varying conditions in order to accommodate variable resources, system errors, and changing requirements.
-
3.
Resilience. It must withstand a number of component failures while continuing to operate normally, thus ensuring service continuity. Single points of failure must be avoided for providing persistence of service delivery.
-
4.
Multi-tenancy. It must be able to monitor applications distributed over different data centers in order to better perform troubleshooting activities in dynamic environments such as cloud scenarios.
We state that none of the existing solutions fulfills all these requirements. In this paper we overcome state-of-the-art limits with a novel open-source monitoring infrastructure. We propose a hybrid architecture for a quasi real-time monitoring of large-scale, geographically distributed network infrastructures spread across multiple data centers, designed to provide high scalability, effectiveness and resilience. Here, the term hybrid refers to the use of two different communication schemes: a hierarchical one and a P2P-based one. Each data center is equipped with its own decoupled monitoring infrastructure; each monitor adopts a hierarchical scheme that ensure scalability with respect to the number of monitored resources, in a subset of the whole architecture. Communications between data centers are performed through the root managers, software modules responsible for orchestrating the whole process. The root managers of every decentralized monitor are connected through a custom communication module that implements the P2P Pastry DHT routing overlay [6]. In this way, a service distributed across several data centers can be jointly monitored through the appropriate root managers. The internal operations of the monitor are geared towards effectiveness objectives. We provide real-time access to single performance samples or graphs, as well as more sophisticated analysis that aim at identifying system or application states for anomaly detection, capacity planning, or other management studies. Every single component in the infrastructure is designed to be resilient to failures. Whenever possible, we enrich the existing software modules with redundancy and failover mechanisms. Otherwise, we automatically restart the modules in case of failure.
The rest of this paper is organized as follows. Section 2 evaluates the current state-of-the-art in the area of large-scale system monitoring. Section 3 describes the design decisions supporting the described requirements, provides a high level architecture of the entire monitoring infrastructure, motivates the choice of the software components and discusses various implementation details. Section 4 investigates the theoretical scalability limits of the proposed architecture figured out from experimental scenarios. Finally, Sect. 5 concludes the paper with some remarks and future work.
2 Related Work
Current state-of-the-art monitoring tools do not guarantee scalability, effectiveness, resilience and multi-tenancy objectives. Fully centralized monitors cannot scale to the desired number of resource data streams. For example, the prototype system introduced in [7], which uses Ganglia [8] and Syslog-NG to accumulate data into a central MySQL database, shows severe scalability limits at only 64 monitored nodes, each one collecting 20 resource data streams every 30 s. Here, the main bottleneck is related to the increasing computational overhead occurring at high sampling frequencies. On the other hand, lowering the sampling frequency (commonly, once every five minutes) can make it difficult to spot rapidly changing workloads which in turn may entail the violation of SLAs [9].
Concerning resilience, the vast majority of both open-source and commercial monitoring infrastructures like OpenNMS [10], Zabbix [11], Zenoss [12] and Cacti [13] are not adequate or designed to address failures, especially if combined with the ability to gather and support millions of resource data streams per second.
In terms of effectiveness, most open-source monitoring tools only partially address this aspect. For example, Graphite [14] and Cacti provide only trending analyses, Nagios [15] provides alerting, while Chukwa [16] and Flume [17] are designed exclusively to collect resource data streams or logs. Also current decentralized, per-data-center, hierarchical monitors such as Ganglia [18] are limited to efficiently compute averages of measures spanning over several nodes. However, the complexity of current workloads in modern data centers calls for more sophisticated processing, such as the identification of correlations among different resource data streams, or the detection of anomalies in the global system state.
Astrolabe [19] is a hybrid solution that combines a hierarchical scheme with an unstructured P2P routing protocol for distributed communications as our proposal does. While it is resilient and highly scalable in terms of data collection and storage, it lacks in effectiveness and its manageability is a complex task since it incurs a lot of network traffic. Unstructured systems do not put any constraints on placement of data items on peers and how peers maintain their network connections and this solution suffers from non-deterministic results, high network communication overload and non-scalability of bandwidth consumption [20].
While collection and network monitoring were addressed in many works with significant results [21–23], the state-of-the-art technology in multi-tenant monitoring is a very niche field. In fact, none of the previous works deals with a multi-tenant environment. At the best of our knowledge, the only open contribution in this sense is given by [24]: it extends monitoring based on data stream management systems (DSMS) with the ability to handle multiple tenants and arbitrary data; however it does not address resilience in terms of single points of failure, it has no implemented prototype, and it does not present any type of analysis to support the proposed architectural choices.
The fuzzy DHT algorithm proposed in this paper addresses the issue of joining the need for advanced lookup features with the need to preserve the scalability of DHTs. Other studies propose flexible queries. For example, Liu et al. propose a system to support range queries [25], other researchers propose keyword queries based on inversed indexes [26, 27], while Tang et al. introduce semantic searches on the CAN DHT [28]. However, all these proposals require separate search services or introduce a completely new routing mechanism. Our approach is different from these proposals for three main reasons. First, the fuzzy DHT algorithm allows the deployment of novel services with only slight modifications to the existing overlay networks, thus allowing a simpler deployment of the fuzzy DHT based overlay. Second, the proposed algorithm is explicitly designed to provide multiple keyword-based searches, which are convenient for locating resources based on attributes. Finally, our algorithm is explicitly designed with efficiency as a primary goal.
3 Architecture
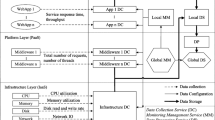
The early decisions that inspired the design of the proposed architecture share four important goals: (1) to dominate the complexity of the monitoring problem (Scalability), (2) to tune the monitoring activities according to different objectives (Effectiveness), (3) to avoid single points of failure (Resilience), and (4) to monitor services spanning across different clusters or data centers (Multi-tenancy). This section details the architecture design of our proposal, with particular emphasis to the design decisions that allow the achievement of the mentioned goals. Figures 1 and 2 present the high level architecture of the monitoring infrastructure. The interested reader can read a more detailed description in [29, 30].

Monitoring system architecture overview.

Cluster architecture.
We propose a hybrid architecture using a hierarchical communication scheme to ensure scalability and a P2P-based communication scheme to allow multi-tenancy. In our opinion, a hybrid solution is the only viable alternative for scaling to an arbitrary number of data centers and the huge problem size makes it literally impossible to deploy any kind of centralized infrastructure. Even worse, service centralization would not be fault-tolerant. For these reasons, each cluster in our architecture is equipped with an independent monitoring infrastructure.
In order to scale to millions of data streams per sample interval, it is mandatory to shift preliminary computations (such as the sampling of a resource and the performing of sanity checks on sampled data) as close as possible to the edge of the monitored infrastructure. Failure to do so would result in a system that unnecessarily processes potentially useless data. For this reason, collected resource data streams are initially filtered (or marked as invalid, anomalous) on the monitored nodes where a collection agent receives the samples from several probe processes. Probe processes are responsible for collecting periodically performance and/or utilization samples regarding a set of hardware and software resources. The collection agent performs preliminary validity checks on them, that are executed through dynamic, pluggable modules that receive in input the data stream and respond with TRUE or FALSE. If at least one check fails, the stream is tagged as invalid, but it is never discarded; this facilitates later debugging operations. The following checks are implemented now: missing value, value out of range, sequence of null values. Then, the collection agent updates the resource data streams and sends them to a set of associated collector nodes. We consider both the sending of uncoded (without compression) and coded (lossless compression) data. A detailed description of the collection agent has been presented by the authors in [31].
The collector node is the main component of the distributed cluster data filter. It receives the checked and coded resource data streams, performs the necessary decoding, applies low cost analyses on decoded data, and stores their results for a real-time plot or further analysis. In the former case, processing stops and the user is able to see immediately the behavior of the resource data streams. In order to support real-time analytics at large scale, at this level we adopt analytic approaches having linear computational complexity and adaptive implementation. Linear solutions permit to understand system behavior in real-time, so as to diagnose eventual problems and take timely corrective actions to meet service level objectives. Adaptivity allows analytic approaches to accommodate variable, heterogeneous data collected across the multiple levels of abstraction present in complex data center systems. Example analyses we implemented at this stage include:
-
1.
computing moving averages of resource data streams, in order to provide a more stable representation of a node status;
-
2.
aggregating (both temporally and spatially) node state representations to obtain global views of the cluster state conditions;
-
3.
extracting trends for short-term prediction of resource consumption and of cluster state conditions;
-
4.
detecting state changes and/or anomalies occurring in data streams for the erase of alarms and the adoption of recovering strategies;
-
5.
correlating node state representations in order to identify dependencies among different nodes in the cluster and to exclude secondary flows.
Nodes and cluster state representations are then sent to two different storages: one for real-time plotting of the decoded and analyzed resource data streams, and one for non-real-time later processing at highest levels. The former storage for real-time plotting is handled by a modified version of OpenTSDB [32] that is able to plot a real-time short-term prediction of the resources trend. This analysis is performed using a linear regression and a Gaussian kernel. The latter storage for non-real-time processing, called data sink, receives data destined to further processing performed by the distributed analyzer described shortly. This solution reduces the number of files generated from one per node per unit time to a handful per cluster [33]. To enhance the performance of the storage engine, we chose to pack the resource data streams (few bytes per each) in larger chunks (64 KB by default) and to write them asynchronously to a distributed file system that can be scaled to the appropriate size by easily adding back-end nodes. In order to provide a homogeneous software layer (eg., Hbase coupling) and an open-source platform, and in order to support a map-reduce paradigm, the best possible choice is the Hadoop Distributed File System (HDFS). It allows extremely scalable computations, it is designed to run on commodity hardware, it is highly fault-tolerant, it provides high throughput access to application data, and it is suitable for applications that have large data sets.
In the latter case, data is made available to the distributed analyzer system. Its purpose is to compute more sophisticated analyses on the resource data streams, such as aggregation of information coming from different clusters, identification of correlated components in the system, anomaly detection and capacity planning. The data streams resulting from these analyses are persistently stored in the distributed data storage. Here, data is available as (key, value) pairs, where “key” is a unique identifier of a measure and “value” is usually a tuple of values describing it (e.g., timestamp, host name, service/process, name of the monitored performance index, actual value). The distributed analyzer system is composed by a set of analyzer nodes. Each analyzer node runs arbitrary batch jobs that analyze the state representation data streams of nodes and clusters. At this stage, we admit the implementation of more computational expensive analyses with respect to those applied at the cluster level. Now, analyses are applied only to small sets of representative information (i.e., nodes and cluster state representations) from which we require to obtain relevant information for management with high levels of accuracy. For example, analyses implemented at data center level are:
-
1.
aggregation of cluster state representations to obtain global views of the data center state conditions;
-
2.
long-term prediction of clusters and data center state conditions computed at different temporal scales and with different prediction horizons;
-
3.
detection of changes and anomalous events in data center state conditions with the identification of which node(s) in the different clusters is the culprit.
We choose the Pig framework for the implementation of the analysis scripts [34]. Pig offers richer data structures over pure map-reduce, for example multivalued and nested dictionaries. Each Pig script is compiled into a series of equivalent map-reduce scripts that process the input data and write the results in a parallel way. Our scripts implement the analyses mentioned above. Further analyses can be easily supported by our architecture and implemented to satisfy more sophisticated requests.
Both the reduced streams representing the system state and the resource data streams processed by OpenTSDB must be written into a data storage. For the sake of performance, it is possible to avoid the reuse of the same structured storage. As matter of facts, the data storage:
-
must scale with an increasing number of data streams;
-
must be fault tolerant;
-
should be designed towards the data management.
In this context, we choose Apache HBase [35] also because of the fact that it includes the homogeneity and the reuse of components. In our architecture, the HBase storage is responsible to preserve all the analyzed information about nodes, clusters and data center. Apache HBase is a distributed column-oriented database built on top of HDFS, designed from the ground-up to scale linearly just by adding nodes. It is not relational and it does not support SQL, but thanks to the proper space management properties, it is able to surpass a traditional RDBMS-based system by hosting very large and sparsely populated tables on clusters implemented on commodity hardware.

The root management system.
The information regarding the data center asset is stored in a distributed configuration database. In this way, we strive to avoid possible inconsistencies mainly due to a service being migrated or receiving more resources. The monitoring infrastructure associates data streams to the identifiers of the corresponding monitored resource. The configuration database is needed to store all information related to the asset of a cluster. Asset-related information includes a description of the resource metadata (name, id), placement (IP of the hosting node or virtual machine), sampling period, and a description of the time interval during which the resource is supposed to be assigned to a service. We think that it is a good idea to use off-the-shelf Configuration Management DataBase Systems (CMDBs). A CMDB is a repository of information related to all the components of an information system, and contains the details of the configuration items in the IT infrastructure. However, the majority of CMDBs is not natively fault tolerant. We address this shortcoming by replicating both its Web front-end and DB back-end. The configuration management database of our choice is OneCMDB. It is an open-source CMDB for data centers that can store configurations such as hardware, software, services, customers, incidents, problems, RFCs and documents. OneCMDB conforms to IT Management best practice declared by the Information Technology Infrastructure Library. It adopts a client-server paradigm and it is used in large production environments with thousands of configuration items. An enhanced graphical user interface enables more effective system operations.
Each monitoring infrastructure is orchestrated by a root management system, a software component that organizes the workflow of monitoring operations and provides a programmable monitoring interface to the user (Fig. 3). All the root managers dislocated on different data centers are interconnected by an efficient DHT overlay routing network. In this first version of our prototype, the other main task carried out by a root manager is to forward early notifications of anomalies in the internal state of some resources to other interested, subscribed root managers. In this way, it is possible to anticipate the performance degradation of services depending on these failing resources.
The orchestration module is the heart of the monitoring system since it orchestrates the operations of the other aforementioned components (collector, data filter, analyzer). One of its main tasks is to trigger and to abort the execution of batch jobs in the distributed cluster data filter and in the analyzer nodes. The communication module is a simple messaging system used to interact with the other components of the monitoring architecture in order to communicate relevant information (such as anomalies in some resource state) to other monitoring systems dislocated in different data centers. The root manager node also receives commands from the user interface; these commands are forwarded to and processed by the orchestration module. The user interface is basically a Web-based application running on any selected node. It manages the resources owned by an application and provides a programmable dashboard with figures of merit, diagrams and configuration parameters (monitored nodes, resources, performance indexes, sampling intervals). Each cluster and each monitored process is represented using embedded OpenTSDB graphs, while the system view is represented using a similar but customized interface that supports also long-term predictions, aggregation analysis, detection and capacity planning. The failover module ensures fault tolerance by identifying which root managers are compromised and by restoring a safe state. To this purpose, each root manager runs part of the replica of the other root managers in the same data center. If a root manager fails, the replica becomes the master until the former one is restored.
When a service is installed on the nodes, the collection and analysis processes supply this information to the root management system, which stores it into the distributed configuration database. At each application deployment, a list of the involved nodes is defined. A unique key is associated to this list; both the key and the list are shared through the DHT with each root management system. The root management system responsible for the largest number of involved nodes selects its best root manager on the basis of multiple configurable metrics. Finally, the selected root manager becomes the service leader.
Each data center is composed by a set of root manager nodes connected through a Pastry-based Distributed Hash Table (DHT) called fuzzy DHT, which has been presented and simulated in [30]. We chose Pastry [6] because it is a generic, scalable and efficient substrate for P2P applications that forms a decentralized, self-organizing and fault-tolerant overlay network. Pastry provides efficient request routing, deterministic object location, and load balancing in an application-independent manner. Furthermore, it provides mechanisms that support and facilitate application-specific object replication, caching, and fault recovery. For example, it is possible to efficiently lookup all CPU utilization time series in a given cluster (or a replica if the origin source is unavailable). The DHT communication module implements all the needed overlay routing functions. The root management system is built upon a set of custom Python and Java modules. The DHT is implemented through the freepastry libraries. The publish-subscribe mechanism used to broadcast alerts to the interested root managers is implemented through Scribe [36]. We previously discussed these aspects from a security point-of-view in [37].
We used exclusively open-source tools that can be modified and adapted for our goals. We used GNU/Linux Debian, Ubuntu and Fedora OSs in different experimental testbeds, enhanced with the software packages from the Cloudera repository (CDH4). The languages used for the deployment of our modules are Bash (v4.2.36), Python (v2.7), Java (v1.6), JavaScript and C (where efficiency is needed, such as in our modified monitor probes). The batch processing framework is Hadoop, version 2.0. Our choice is motivated by the dramatic scalability improvement with respect to traditional RDBMS-based data storage architectures under random, write-intensive data access patterns [38]. To avoid single points of failure and to ensure service continuity, we enforce redundancy of every component of the monitoring architecture. Whenever possible, we deploy our solution using software that can be easily replicated. In other cases, we wrap the component through custom scripts that detect failures and restart it, in case.
We implemented the user interface using the Django MVC framework and the JQuery library to enhance the presentation of data. The responsiveness of the application is improved through the adoption of AJAX-based techniques and the Web server Apache v.2.2.
4 Analysis
We perform experimental analyses for evaluating the ability of the proposed monitoring architecture in satisfying all requirements of scalability, effectiveness, resiliency and multi-tenancy. Due to the limited space, in this section we only report analysis results about the scalability of our solution. We evaluate the scalability of the proposed architecture in terms of number of monitored resource data streams. In particular, we aim to find out:
-
how many resource data streams can be monitored per node (intra-node scalability);
-
how many nodes can be monitored in a cluster (intra-cluster scalability).
Highest level scalability (intra-data center scalability) is left for future extensions and strongly depends on both resource behaviors and aggregation results obtained through analytics computed in the distributed analyzer system. In this paper, we used the Amazon EC2 IaaS platform. In the considered infrastructure, the backing storage is shared across the instances (EBS), and the theoretical network connectivity is up to 1Gbps. The virtual machines are running instances of the TPC-W and RUBiS benchmark suites. MapReduce jobs queries are used for data distribution and analysis. We perform Map-Reduce versions of several performance analyses having different computational costs, including the moving average and the Principal Component Analysis (PCA) over more than 1 h of data collected from 2048 monitored nodes. We emphasize that the results are strongly influenced by the resource consumption of the TSDB component, and the tuning of this trade-off is out of the scope of this paper. However, we measure that the PCA (i.e., the most computational expensive analysis) requires an average of 5 min when computed over 8 collector nodes using around the 85 % of CPU (the 12.5 % was used for collector process). This result shows that the behavior of a single cluster during the collection of over more than 6M of resource data streams per second can be analyzed (in batches) within quasi real-time constraints.
In each monitored node, one probe is dedicated to system-related performance monitoring through the output of the vmstat and sar monitors. The remaining probes are process-related through pidstat and nethogs2 monitors. This system probe collects 25 different performance indexes, while each process probe collects 23 different resource data streams. The sampling interval is configured at 1 s for each probe in order to emulate the most challenging scenario.
4.1 Intra-node Scalability
In the first experimental testbed, we evaluate how many resource data streams can be handled for each monitored node. We use one collector node and one analyzer node running a single script that computes the moving average for every resource data stream. The detail of the resources of the monitored node is the following: micro instance, 613 MB memory, up to 2 EC2 Compute Units (Dual-Core AMD Opteron (tm) Processor 2218 HE, cpu 2.6 GHz, cache size 1,024 KB), EBS storage, dedicated network bandwidth of theoretically 100 Mbps per node.
Table 1 reports the average resource consumption (percentage of CPU, memory (RAM) and network (NET) utilization) of the collection agent as a function of the number of monitored resource data streams. We performed tests on both uncoded (without compression) and coded (lossless compression) data in order to evaluate the impact of compression on the scalability of the different resources. Then, we evaluate how the use of the Adaptive algorithm that we proposed in [39] improves the scalability of our architecture. The Adaptive algorithm is able to adapt the frequency of sampling and data updating to minimize computational and communication costs, while guaranteeing high accuracy of monitored information. From these tests, we see that at intra-node level, sending data streams has a negligible impact on the network bandwidth, despite the fact that it is reduced of about 50 % by using lossless compression and more than 80 % by using the Adaptive algorithm. We see also that the most used resource without data compression or with Adaptive algorithm is the memory, while with lossless compression the most used resource is the CPU. At 128 probes, both the CPU and memory utilizations are less than 10 %. This threshold is commonly used as the largest fraction of resource utilization that administrators are comfortable devoting to monitoring. We have adopted this threshold as our target maximum resource utilization for the monitoring system. Hence, on each monitored node, we can collect up to 128 probes for a total of 2,946 resource data streams per second. We recall that a period of one second is much shorter than commonly adopted sampling periods that typically do not go below one minute.
4.2 Intra-cluster Scalability
In the following set of experiments, we consider nodes within a cluster, monitored with the same probe setup. We measure the resource consumption of the collector at cluster level with or without compression efforts and with the Adaptive algorithm.
Table 2 reports the average resource consumption of the collector node as a function of the number of monitored nodes. From this table, we see that without compression the most used resource is the network that allows the monitoring of at most 64 nodes (or 188,544 resource data streams) in a cluster. On the contrary, compressing data strongly impacts the CPU utilization. Despite that, the compression of data allows to monitor more than 128 nodes or \(2,946 \cdot 128 = 377,088\) resource data streams per second. By using the Adaptive algorithm we are able to monitor up to 512 nodes per collector, meaning 1.5M resource data streams per second.
As further result, we add collector nodes and increment the number of monitored hosts to evaluate the scalability of the distributed cluster data filter. Table 3 reports the average resource utilization across the collector nodes. We keep adding collectors up to 2,048 monitored nodes. We also add more HDFS and HBASE nodes to support the write throughput when the number of nodes becomes higher than 256. We keep 256 as limit in the number of nodes since overcoming the 50 % of incoming network bandwidth of the collector node means overcoming the 100 % of outcoming bandwidth. In this scenario, by using the Adaptive algorithm we are able to monitor about 6M resource data streams by using an average 12.5 % of CPU and 47.3 % of network bandwidth.
This analysis on scalability reveals that the proposed architecture is able to collect and process:
-
more than 2900 resource data streams per second, from 128 probes, on a single monitored node, with a resource utilization \(<\)10 %;
-
more than 754000 resource data streams per second, from 256 different monitored nodes using a single collector node;
-
more than 6000000 resource data streams per second per cluster.
By using the TSDB component, every collector node provides the real-time plotting. In Table 4, we report the resource consumption of this process. In this testbed we request an increasing number of graphs (from 10 to 100) and we set a refresh rate of 15 s for each graph. As for the collector process, the memory consumption of the TSDB component is negligible with respect to the CPU consumption. The TSDB process uses about the 66 % of CPU while plotting 100 graphs (i.e. 30000 resource data streams) for each collector node every 15 s. Moreover, Table 4 shows that both the incoming and outcoming network bandwidth consumptions are negligible if compared to the network consumptions of the collector process. By using the 12.5 % and the 66.4 % of CPU for the collector and TSDB respectively, more than the 20 % of spare CPU can be used for other purposes like the execution of the Distributed sample storage jobs.
4.3 DHT Scalability
In the last section we evaluate the efficiency of the DHT-based communication mechanism. Table 5 shows the average number of exchanged messages per lookup process as a function of the number of root managers in the monitoring infrastructure. We compare our implementation with two other popular P2P communication schemes: a flood-based system (like the one provided by the Gnutella file sharing network) and a probabilistic flood-based one. We observe that every algorithm shows an increment in the traffic generated with each query. However, the overhead growth of the flood-based and probabilistic flood algorithms is much more evident than the overhead growth of the fuzzy DHT algorithm. The main reason of this overhead lies in the fact that, for every lookup performed, the number of nodes to visit is much higher. The probabilistic flood-based algorithm can randomly decide to not forward queries across nodes; this explains the reduced overhead with respect to the pure flood-based solution. On the other hand, the better scalability of fuzzy DHT is due to its ability to route queries only to a reduced fraction of nodes that have an high probability of hosting the requested resource.
5 Conclusions
In this paper, we proposed a novel hybrid architecture for monitoring large-scale, geo-graphically distributed network infrastructures spread across multiple data centers. Architectural choices are made in order to satisfy scalability, effectiveness, resiliency and multi-tenancy requirements. These choices are mandatory when you have to support gathering and analysis operations of huge numbers of data streams coming from cloud system monitors. The proposed architecture is already integrated with on-line analyzers working at different temporal scales. Our preliminary experiments show the potential scalability limits of the monitoring system: more than 6M of resource data streams per cluster, per second. All these operations of data streams are carried out within real-time constraints in the order of seconds thus demonstrating that huge margins of improvement are feasible.
References
Dean, J., Lopes, J.: MapReduce: simplified data processing on large clusters. In: OSDI 2004, 6th Symposium on Operating Systems Design and Implementation, USENIX Association (2004)
Calder, B., et al.: Windows Azure storage: a highly available cloud storage service with strong consistency. In: SOSP 2011, 23rd ACM Symposium on Operating System Principles. ACM (2011)
Shvachko, K., et al.: The hadoop distributed file system. In: MSST 2010, 26th Symposium on Massive Storage Systems and Technologies. IEEE Computer Society (2010)
Gantz, J., Reinsel, D.: The digital universe in 2020: big data, bigger digital shadows, and biggest growth in the far east (2012). http://www.emc.com/leadership/digital-universe/iview/big-data-2020.htm
Traverse: distributed, scalable, high-availability architecture (2010–2013). http://www.zyrion.com/company/whitepapers
Rowstron, A., Druschel, P.: Pastry: scalable, decentralized object location, and routing for large-scale peer-to-peer systems. In: Guerraoui, R. (ed.) Middleware 2001. LNCS, vol. 2218, pp. 329–350. Springer, Heidelberg (2001)
Litvinova, A., Engelmann, C., Scott, S.L.: A proactive fault tolerance framework for high-performance computing. In: PDCN 2010, 9th IASTED International Conference on Parallel and Distributed Computing and Networks (PDCN2010). ACTA Press (2010)
Massie, M.L., Chun, B.N., Culler, D.E.: The Ganglia distributed monitoring system: design, implementation, and experience. Parallel Comput. 30, 817–840 (2004)
Keller, A., Ludwig, H.: The WSLA framework: specifying and monitoring service level agreements for web services. J. Netw. Syst. Manag. 11, 57–81 (2003)
Surhone, L.M., Tennoe, M.T., Henssonow, S.F.: OpenNMS. Betascript Publishing, Mauritius (2011)
Olups, R.: Zabbix 1.8 Network Monitoring. Packt Publishing, Birmingham (2010)
Badger, M.: Zenoss Core Network and System Monitoring. Packt Publishing Ltd., Birmingham (2008)
Kundu, D., Lavlu, S.: Cacti 0.8 Network Monitoring. Packt Publishing, Birmingham (2009)
Davis, C.: Graphite - Scalable Realtime Graphing (2013). http://graphite.wikidot.com
Josephsen, D.: Building a Monitoring Infrastructure with Nagios. Prentice Hall, Upper Saddle River (2007)
Rabkin, A., Katz, R.: Chukwa: a system for reliable large-scale log collection. In: LISA 2010, 24th International Conference on Large Installation System Administration. USENIX Association (2010)
Hoffman, S., Souza, S.D.: Apache Flume: Distributed Log Collection for Hadoop. Packt Publishing, Birmingham (2013)
Sacerdoti, F.D., Katz, M.J., Massie, M.L., Culler, D.E.: Wide area cluster monitoring with Ganglia. In: Proceedings of Cluster Computing (2003)
Renesse, R.V., Birman, K.P., Vogels, W.: Astrolabe: a robust and scalable technology for distributed system monitoring, management, and data mining. ACM Trans. Comput. Syst. 21, 164–206 (2003)
Lv, Q., Cao, P., Cohen, E., Li, K., Shenker, S.: Search and replication in unstructured peer-to-peer networks. In: ICS 2002, 16th International Conference on Supercomputing. ACM (2002)
Babu, S., Subramanian, L., Widom, J.: A data stream management system for network traffic management. In: NRDM 2001, 1st Workshop on Network-Related Data Management (2001)
Cranor, C., Johnson, T., Spataschek, O.: Gigascope: a stream database for network applications. In: SIGMOD 2003, 2003 ACM SIGMOD International Conference on Management of Data. ACM (2003)
Voicu, R., Newman, H., Cirstoiu, C.: MonALISA: an agent based, dynamic service system to monitor, control and optimize distributed systems. Comput. Phys. Commun. 180, 2472–2498 (2009)
Hasselmeyer, P., d’Heureuse, N.: Towards holistic multi-tenant monitoring for virtual data centers. In: NOMS 2010, 2010 IEEE/IFIP Network Operations and Management Symposium Workshops. IEEE Computer Society (2010)
Liu, B., Lee, W.C., Lee, D.L.: Supporting complex multi-dimensional queries in p2p systems. In: Proceedings of 25th IEEE International Conference on Distributed Computing Systems (ICDCS 2005), Columbus, OH (2005)
Reynolds, P., Vahdat, A.: Efficient peer-to-peer keyword searching. In: Endler, M., Schmidt, D.C. (eds.) Middleware 2003. LNCS, vol. 2672, pp. 21–40. Springer, Heidelberg (2003)
Joung, Y.J., Fang, C.T., Yang, L.W.: Keyword search in dht-based peer-to-peer networks. In: Proceedings of 25th IEEE International Conference on Distributed Computing Systems (ICDCS 2005), Columbus, OH (2005)
Tang, C., Xu, Z., Mahalingam, M.: psearch: information retrieval in structured overlays. SIGCOMM Comput. Commun. Rev. 33, 89–94 (2003)
Andreolini, M., Pietri, M., Tosi, S., Balboni, A.: Monitoring large cloud-based systems. In: CLOSER 2014, 4th International Conference on Cloud Computing and Services Science. SCITEPRESS Digital Library (2014)
Andreolini, M., Lancellotti, R., Yu, P.S.: A flexible and efficient lookup algorithm for peer-to-peer systems. In: IPDPS 2009, 23rd IEEE International Parallel and Distributed Processing Symposium. IEEE Computer Society (2009)
Andreolini, M., Colajanni, M., Pietri, M.: A scalable architecture for real-time monitoring of large information systems. In: NCCA 2012, 2nd IEEE Symposium on Network Cloud Computing and Applications. IEEE Computer Society (2012)
Sigoure, B.: OpenTSDB, a distributed, scalable Time Series Database (2010). http://opentsdb.net
Andreolini, M., Colajanni, M., Tosi, S.: A software architecture for the analysis of large sets of data streams in cloud infrastructures. In: CIT 2011, 11th IEEE International Conference on Computer and Information Technology. IEEE Computer Society (2011)
Olston, C., et al.: Pig Latin: a not-so-foreign language for data processing. In: SIGMOD 2008, 2008 ACM SIGMOD International Conference on Management of Data. ACM, New York (2008)
George, L.: HBase: The Definitive Guide. O’Reilly Media, Sebastopol (2011)
Castro, M., Druschel, P., Kermarrec, A.M., Rowstron, A.: Scribe: a large-scale and decentralized application-level multicast infrastructure. IEEE J. Sel. Areas Commun. (JSAC) 20, 1489–1499 (2002)
Marchetti, M., Colajanni, M., Messori, M.: Selective and early threat detectionin large networked systems. In: CIT 2010, 10th IEEE International Conference on Computer and Information Technology. IEEE Computer Society (2010)
Leu, J.S., Yee, Y.S., Chen, W.L.: Comparison of map-reduce and SQL on large-scale data processing. In: ISPA 2010, 1st International Symposium on Parallel and Distributed Processing with Applications. IEEE Computer Society (2010)
Pietri, M., Tosi, S., Andreolini, M., Colajanni, M.: Real-time adaptive algorithm for resource monitoring. In: CNSM 2013, 9th International Conference on Network and Service Management, Zurich, Switzerland, CNSM (2013)
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2015 Springer International Publishing Switzerland
About this paper
Cite this paper
Andreolini, M., Pietri, M., Tosi, S., Lancellotti, R. (2015). A Scalable Monitor for Large Systems. In: Helfert, M., Desprez, F., Ferguson, D., Leymann, F., Méndez Munoz, V. (eds) Cloud Computing and Services Sciences. CLOSER 2014. Communications in Computer and Information Science, vol 512. Springer, Cham. https://doi.org/10.1007/978-3-319-25414-2_7
Download citation
DOI: https://doi.org/10.1007/978-3-319-25414-2_7
Published:
Publisher Name: Springer, Cham
Print ISBN: 978-3-319-25413-5
Online ISBN: 978-3-319-25414-2
eBook Packages: Computer ScienceComputer Science (R0)