
Abstract
This research addresses modeling the kinematic and dynamic response of the human jaw system, from an analytical, virtual and experimental viewpoint. Kinematic parameter variation laws have been identified which define the mandible motions on a human skull and a human subject through experimental measurements. A virtual human skull reconstruction it is presented, by using an original method and this was parameterized on a modular concept, based on the anatomy of a human subject. For this, equivalent mechanisms of the human jaw were elaborated and these represent a base frame for inverse kinematic modeling in an analytical way. This analysis has been validated with a numerical processing algorithm in order to identify the generalized coordinate variation laws. Human jaw muscle groups have been modeled as linear actuators. The aim of this research is to perform a dynamic analysis by using the finite element method, for stress and deformation distributions determination, on normal or critical motions cases. Mathematical and virtual models, created through a modular construction, easily permit us to evaluate in a dynamic mode different dental prostheses used in dentistry domain.
Access provided by Autonomous University of Puebla. Download conference paper PDF
Similar content being viewed by others


Keywords
1 Introduction
The human jaw system study has been and still is, over time, one of the most important research themes for many researchers from large domains in the context of the medical environment [1]. This system is one of the most complex of the human body, due to its morphological components and functionality. Researchers such as [2] developed specific studies on this topic by establishing motion influence on the human speech process. Other researchers have made studies regarding kinematic models equivalent to the human jaw system by using different analytical or experimental methods [3–5]. Such analyses are useful e.g. in dentistry modeling and reconstruction areas, in order to determine mandible motion laws and some characteristic points trajectories, without considering the muscle system behavior. The muscle groups from the human jaw structure have a crucial role in mastication or speech processes and it cannot be neglected.
Thus, theoretical models of the human jaw system muscle groups were studied in [6, 7], and represent some starting points for this research. The kinematic analyses accomplished by these researchers were used on elaborating some mathematical models for human jaw dynamic behavior study [8–10].
Based on these models, a virtual reality simulation with specific finite element software has been developed [11].
The research aim is to identify the human jaw dynamic response on two major cases: motion laws variation depending on time for mandible kinematic parameters considering solid-rigid bodies, respectively, deformable bodies; stress, deformations and displacement diagrams determination, depending on time, by connecting the solid-rigid body motion with a deformable one, for any component from human jaw system.
For this aim, on first part a state of the art was performed in order to identify the problematic and objectives proposals. The input data used for this analysis are the mandible motion laws for main motions of the human jaw, during mastication, speech, etc. These laws can be determined through experimental tests on the second part of the research. The main interest for this is focused on mandible trajectories, by using equipment with high-speed recording cameras. Also these represent a template for kinematic model validation developed for inverse kinematic analysis, which will be performed in third part of the human jaw system research. Virtual simulations are performed in the fourth part. Also for this, a virtual model of a human skull will be developed based on CT-series, and will be used for a complex analysis performed on dynamic mode by applying some special parameterized modeling techniques, presented in the last part of the research. This research ends with final conclusions regarding the behavior modeling and virtual simulations on a dynamic mode in normal or critical conditions imposed to the analyzed muscle groups such as: temporal, masseters and pterygoid. Also by performing these analyses one can do a feasibility study to perform virtual tests on dental implants, for validating new concepts in dentistry domain.
2 Human Jaw Experimental Analysis
2.1 Geometrical Parameters Identification
Before starting the experimental analysis of a human jaw one it is needed to identify the mandible fundamental motions. These are: elevation, depression and protraction-retraction motions. These motions can be decomposed and studied in three reference plane: frontal, horizontal and sagittal plane. For this, the mandible can be considered as a spatial segment, with one marker “E” placed on the middle of the inter-incisive tooth, and this point represents the interest one for experimental studies.
On Fig. 1 it can be identified: TEM-temporal muscle; MAS-masseter muscle; PTL-lateral pterygoid muscle; PTM-median pterygoid muscle; Dr, St—left and right side of the mandible; XOY-transversal plane; ZOY-frontal plane; ZOX-sagittal plane. On this model the following parameters defines the mandible form and dimensions as a curved segment: A1, M1, N1, R, E, N2, M2, A2. These geometric parameters were evaluated by considering a human skull real model as: (A1A2) = l1 = 100.5 mm; (A1M1) = l2 = 67 mm; (M1N1) = l3 = 58 mm; (ES) = l4 = 19 mm; α = 27°; β = 67°; γ = 25°; r = 28 mm; δ = 81°; l5 = 86.5 mm.

Human mandible modeling as a spatial segment and the described theoretical curves during motions for point E (a spatial view; b frontal view; c bottom view, d lateral view)
2.2 Kinematic Parameters Identification
For the mandible motions, one it was used CONTEMPLAS equipment in the sight of variation laws determination. This equipment has two high-speed cameras for motion recording and Faculty of Mechanics—University of Craiova—Romania owns this equipment in one of his laboratories. This equipment can record sequences with a speed of 350 frames/s. His integrated software can automatically track and recognize specific markers placed on the desired mobile system. These markers have reflective properties and represent the experimental analysis interest points. There were identified the mandible kinematic parameters variation depending on time (linear and angular positions) in case of a living human subject and also on a human skull dummy for three major cases: elevation, depression and protraction-retraction motions. This complex experimental analysis was developed for a time period of 10 s.
3 Human Mandible Inverse Kinematic Analysis
The human jaw mechanism is complex and it is almost impossible to obtain directly complete kinematic data from a real subject. Many researchers tried to realize some robotic models which can perform similar motions with the ones developed by humans during chewing processes. For elevation and depression motions there were used three different equivalent mechanisms. The input data for kinematic analysis were obtained on direct measurements over a real human skull . The muscles which actuate human mandible on the corresponding motions were replaced with linear actuators by taking into account the origins and insertion points. Each muscle has a crucial role on the human chewing process. The human mandible inverse kinematic analysis consists on evaluation of the kinematic parameters of the equivalent mechanism represented in Fig. 2. As an input data there are considered the positions, velocities and accelerations of the point T equivalent with point placed on the middle of the inter-incisive tooth. The kinematic model presented in Fig. 2 has three DOF and from a theoretical viewpoint this will be kinematically analyzed on sagittal plane. In case of direct kinematic analysis the variable parameters will be imposed on active joints B, E and H. Thus, these are used for links kinematic parameters determination. The link no 3 position is known, through point C position and φ3 angle and from these variables, the position of point T can be determined.

Human mandible kinematic model for muscle linear actuation
For a direct kinematic analysis one it will impose variable parameters on active mechanism joints B, E and H. The aim of this is to determine the kinematic parameters of the mechanism links and especially point T. This can be possible by knowing the link no. 3 position, by C joint position and φ3 angle.
In order to create a kinematic analysis algorithm by using a programming software, there are well known the following entry data: XA = 0.200 m; YA = 0.100 m; XF = 0.176 m; YF = 0.114 m; XI = 0.108 m; YI = 0.100 m; XT = 0.030 m; YT = 0.034 m; XJ = 0.140 m; YJ = 0.050 m; CD = 0.041 m; CG = 0.030 m; DG = 0.034 m; CT = 0.120 m; DT = 0.100 m; OM3 = 1 rad/s; EPS3 = 0 rad/s2; Displacement = 0.2 m. For the mechanism inverse kinematic analysis from Fig. 2, the point T coordinates will be imposed, speed and accelerations projections on the XOY coordinate system, also the drive link no 3 position, angular speed and acceleration depending on coordinate fixed system.
For these data it will be considered the mandible elevation motion as an initial phase. Thus, the number of positions imposed for point “T” is “n = 21” and the step size is “incr = displacement/(n − 1)/2”. The obtained results are presented on Figs. 3 and 4. On Fig. 3 are represented the φ1, φ2, φ3 and φTC angle variations and on Fig. 4 there are represented the B, E and H translational joints variables.

φ1, φ2, φ3 and φTC angle variations diagram

B, E and H translational joints diagram
4 Human Jaw Geometric Modeling
In order to validate these kinematic results, a 3D virtual reality model of the human jaw has been built. Thus, it is necessary to obtain a simplified human jaw virtual model, based on a procedure which starts from CT-series. For this procedure it is necessary to use three main software: ImageJ, UltraEdit and CATIA. First step of the procedure represents the CT-series achievement based on a medical protocol. After, with ImageJ software aid, there are identified the voxels coordinate position on each CT-image and creating files with these in a *.cgo format. Each voxel position was given by three numbers which represents numerical values on a 3D space. Last step of this procedure is represented by importing those files in CATIA/Quick Shape Reconstruction environment and by crossing specific modeling commands there are automatically generated 3D solids of the scanned human skull components.
5 Dynamic Analysis
The main objective for human jaw dynamic analysis is given by dynamic response identification for two major cases: kinematic parameters variation laws on time determination for mandible element, in two situations: solid-rigid body type motions, and deformable body type motion; distribution diagrams determination on time for stress, deformations and displacements by connecting the solid-rigid body type motion with a deformable body type, for any human jaw system components.
This complex dynamic analysis was also possible by applying special modeling techniques for whole parameterized mechanism, with implementing and virtual testing possibilities of some specific dentistry implants. Also for this analysis there were developed normal or critical analysis conditions, for obtaining the dynamic response in the proposed muscle group categories such as: masseter, temporal and pterygoid.
The proper method used for this analysis was the finite element method [12, 13] and for this the following essential steps were accomplished:
-
1.
Importing the geometrical model and the input database definition for dynamic analysis with AnsysWorkbench.
-
2.
Material properties according to [14] were defined as it follows: Longitudinal elasticity modulus: 1.5 × 1010 N/m2; Poisson ratio: 0.3; Density: 1300 kg/m3.
-
3.
Initial conditions and loads definition. The connection between human mandible and the rest of the skull was achieved in a first stage through 2DOF by defining the masseter and pterygoid muscles actuated based on the following motion laws:
-
For masseter muscle the acquired motion law was obtained experimentally and can be modeled through a polynomial function as:
$$ \begin{aligned} \text{M}_{{1\deg \text{rees}}} = & \,53.2323116980194\, + \,9.35452417104385 \cdot \text{t} \\ & - 7.56606633739702 \cdot \text{t}^{2} 94\, + \,3.92744714101664 \cdot \text{t}^{3} \\ & - 0.822936579737940 \cdot \text{t}^{4} 94\, + \,0.0733878803714015 \cdot \text{t}^{5} \\ & - 0.00236916571951944 \cdot \text{t}^{6} \\ \end{aligned} $$(1) -
For pterygoid muscle the acquired motion law was obtained experimentally and can be modeled through a polynomial function as:
$$ \begin{aligned} \text{M}_{{\text{2degrees}}} = & \,56.9556461168417 - 1.96871495028217 \cdot \text{t} \\ & + 4.05428882061227 \cdot \text{t}^{2} - 1.70468503612114 \cdot \text{t}^{3} \\ & + 0.299520826167666 \cdot \text{t}^{4} - 0.0244013429388200 \cdot \text{t}^{5} \\ & - 0.000762463712591352 \cdot \text{t}^{6} \\ \end{aligned} $$(2)These polynomial functions are plotted on diagrams on Figs. 5 and 6, by using a MAPLE computation algorithm. For stability control of the virtual model , the human skull will be fixed in space.
Fig. 5 
Human mandible motion law (degrees) for actuating the masseter muscle versus time (seconds): a polynomial function with MAPLE algorithm; b experimental motion law obtained with CONTEMPLAS equipment
Fig. 6 
Human mandible motion law (degrees) for actuating the pterygoid muscle versus time (seconds): a polynomial function with MAPLE algorithm; b experimental motion law obtained with CONTEMPLAS equipment
-
-
4.
Contact definition between human skull virtual model components.
-
5.
Masseter, temporal and pterygoid muscle groups modeling, which is assured with spring elements. For these, stiffness, damping factors and preload forces were defined in accordance with [1, 15].
-
6.
Meshing the virtual model components with tetrahedral finite elements type and meshing network control on the critical zones with variable geometry (Fig. 7). This virtual model was conceived in a modular system with the possibility of teeth detaching for implants construction or prosthesis applications .
Fig. 7 
Parameterized human skull mesh with tetrahedral finite elements type
-
7.
Dynamic response analysis of this system is possible by monitoring stress, displacements and deformations complex behavior for the elements which were considered as deformable ones.



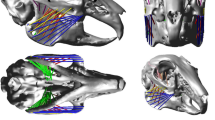
Thus the dynamic analysis completion is performed in a coupled mode muscle—actuated joint by the possibility of dynamical characteristics of those muscle groups accordingly with [1, 15]. The dynamic models spatial configuration for chosen muscle pairs is shown in Fig. 8.

Dynamic models spatial configuration for the analyzed muscle groups
The mandible motion was experimentally analyzed on a 10 s time interval. The mandible dynamic response analysis was performed for different cases of temporal settings in case of angle variation motions of joints actuated by the pterygoid and masseter muscle groups. The mandible displacements, stress and deformation distributions have been determined for the following cases: virtual model actuated by actuation joints; motion analysis in a joined mode muscles-actuated joints for a complete dynamic model by considering also the damping; dynamic analysis considering the loads applied on molar teeth.
5.1 Dynamic Analysis in a Joined Mode Muscles-Actuated Joints with Dynamic Characteristics Definition of the Three Main Muscle Groups Accordingly with [11]
The dynamic models have been developed for the specified muscle categories (masseter, temporal and pterygoid), according with [1, 15]. So for these (Figs. 9 and 10), the input parameters on dynamic analysis consist in damping and stiffness factors on longitudinal direction, and also load force as it follows: masseter muscle dynamic model (k = 30 N/mm = 4.28 Nxs/m; F = 150 N); temporal muscle dynamic model (k = 6 N/mm = 2.14 Nxs/m; F = 150 N); pterygoid muscle dynamic model (k = 11 N/mm = 2.5 Nxs/m; F = 200 N).

Setting the dynamic analysis for a time interval of 10 s

Resultant displacements distribution (millimeters) according with lateral motion maximum amplitude
5.2 Dynamic Analysis Considering the Loads Applied on Molar Teeth
For this case which this it is the most important one, a variable loading was considered on inferior molars. This it is conditioned by two situations: all inferior molars are loaded with a pressure which his distribution was appreciated as in Fig. 11 [16]; the main muscle groups (temporal, masseter and pterygoid) are modeled as springs with their main characteristics previously specified. After second case processing, the dynamic response is represented by resultant displacements, deformations and equivalent von Misses stress distributions. Ones are shown in Figs. 12 and 13.

Molar pressure distribution on mandible structure

Von Misses equivalent stress distribution (detail on mandible )

Kinematic and dynamic parameters distribution for both muscle categories
6 Conclusions
The inverse kinematic analysis was performed by creating a proper equivalent human jaw mechanism system which has 3DOF and it simulates mandible motion in sagittal plane. On the kinematic model, linear actuators were introduced for mobility degrees modeling, in order to substitute the masseter, pterygoids and temporal muscle groups. The kinematic analysis simulation was accomplished by obtaining motion laws for two distinctive cases: motion for solid-rigid body type and deformable body type. Human jaw system dynamic analysis was performed for many mandible motion laws, which were actuated by the chosen muscle groups. Simulations for dynamic analysis were performed by connecting the solid-rigid body type motion with a deformable one. In addition, the mandible dynamic response was performed for different cases of angle variation laws temporal settings from the allocated joints of two muscle groups (masseter and pterygoid). It was considered a time interval for setup the virtual simulations in a dynamic mode. This was 10 s, and represents the same time considered on experimental tests.
The angle motion laws for the guide joints are defined from 0 to 10 s for masseter muscle equivalent model. For the joint actuated through pterygoid muscle, the response time interval was divided in a proper manner for a correct simulation of the chewing process. During this period, mandible was the mobile element, and the obtained results were stress, deformations and displacements for the following cases: actuated model only by drive joints; mandible motion analysis, actuated by muscle groups on a dynamic model without considering the damping coefficients; monitoring the displacements and deformations distribution for a muscle dynamic models defined on deformable elements; dynamic analysis on a coupled mode muscle-drive joints for a complete dynamic model with damping coefficients consideration; dynamic analysis for pressure distribution case when this is variable on teeth.
References
Gray H (1992) Anatomy of the human body. Lea & Febiger, Philadelphia
Paul L, Gribble M (1997) An examination of the degrees of freedom of human jaw motion in speech and mastication. J Speech, Lang Hearing Res 40:1341–1351
Chen X (1998) The instantaneous center of rotation during human jaw opening and its significance in interpreting the functional meaning of condylar translation. Am J Phys Anthropol 106:35–46
Yashiro K, Takagi M, Takada K (2003) Kinematic analysis of power-law relationship between jaw movement velocity and curvature. In: Proceedings of IEEE EMBS Asian-Pacific conference biomedical engineering. pp 276–277
Yatabe M, Zwijnenburg A, Megens CC, Naeije M (1997) Movements of the mandibular condyle kinematic center during jaw opening and closing. J Dent Res 714–719
Epstein M, Herzog W (1998) Theoretical models of skeletal muscle: biological and mathematical considerations. Wiley, Chichester
Goto TK, Langenbach GEJ, Hannam AG (2001) Length changes in the human masseter muscle after jaw movement. Anat Rec 262:293–300
Beek M, Koolstra JH, van Ruijven LJ, van Eijden TM (2000) Three-dimensional finite element analysis of the human temporomandibular joint disc. J Biomech 33:307–316
Hannam AG, Langenbach GEJ, Peck CC (1997) Computer simulation of jaw biomechanics. In: McNeill C (ed) Science and practice of occlusion. Chicago IL, Quintessence, pp 187–194
Koolstra JH, van Eijden TM (1997) Dynamics of the human masticatory muscles during a jaw open-close movement. J. Biomech 30:883–889
Koolstra JH, Van Eijden TM (2001) A method to predict muscle control in the kinematically and mechanically indeterminate human masticatory system. J. Biomech 34:1179–1188
Daryl L (2001) Logan: a first course in the finite element method
Dumitru N, Margine Al (2002) Bazele modelarii in ingineria mecanică. Editura Universitaria, Craiova
Koolstra JH, van Eijden TM (2005) Combined finite-element and rigid-body analysis of human jaw joint dynamics. J Biomech 38:12
Krebs M, Gallo LM, Airoldi RL et al (1994) Three-dimensional animation of the temporomandibular joint. Technol Health Care 2:193–207
Weijs WA, Hillen B (1984) Relationship between the physiological cross-section of the human jaw muscles and their cross-sectional area in computer tomograms. Acta Anat 118:129–138
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2016 Springer International Publishing Switzerland
About this paper
Cite this paper
Dumitru, N., Copilusi, C., Ciortan, M. (2016). Kinematic and Dynamic Study Contributions on Human Jaw System. In: Bleuler, H., Bouri, M., Mondada, F., Pisla, D., Rodic, A., Helmer, P. (eds) New Trends in Medical and Service Robots. Mechanisms and Machine Science, vol 38. Springer, Cham. https://doi.org/10.1007/978-3-319-23832-6_7
Download citation
DOI: https://doi.org/10.1007/978-3-319-23832-6_7
Published:
Publisher Name: Springer, Cham
Print ISBN: 978-3-319-23831-9
Online ISBN: 978-3-319-23832-6
eBook Packages: EngineeringEngineering (R0)