
Abstract
Lunar and satellite laser ranging (LLR/SLR) are consolidated techniques which provide a precise, and at the same time, cost-effective method to determine the orbits of the Moon and of satellites equipped with laser retroreflectors with respect to the International Celestial Reference System. We describe the precision tests of general relativity and of new theories of gravity that can be performed with second-generation LLR payloads on the surface of the Moon (NASA/ASI MoonLIGHT project), and with SLR/LLR payloads deployed on spacecraft in the Earth–Moon system. A new wave of lunar exploration and lunar science started in 2007–2008 with the launch of three missions (Chang’e by China, Kaguya by Japan, Chandrayaan by India), missions in preparation (LCROSS, LRO, GRAIL/LADEE by NASA) and other proposed missions (like MAGIA in Italy). This research activity will be greatly enhanced by the future robotic deployment of a lunar geophysics network (LGN) on the surface of the Moon. A scientific concept of the latter is the International Lunar Network (ILN, see http://iln.arc.nasa.gov/). The LLR retroreflector payload developed by a US–Italy team described here and under space qualification at the National Laboratories of Frascati (LNF) is the optimum candidate for the LGN, which will be populated in the future by any lunar landing mission.
Access provided by Autonomous University of Puebla. Download chapter PDF
Similar content being viewed by others

Keywords
- Very Long Baseline Interferometry
- Lunar Surface
- Lunar Laser Range
- Strong Equivalence Principle
- Geodetic Precession
These keywords were added by machine and not by the authors. This process is experimental and the keywords may be updated as the learning algorithm improves.
1 Lunar Laser Ranging
Lunar laser ranging (LLR) is mainly used to conduct high-precision measurements of ranges between laser stations on Earth and a corner cube retroreflector (CCR) array on the lunar surface. Over the years, LLR has benefited from a number of improvements both in observing technology and data modeling, which led to the current accuracy of postfit residuals of \(\sim \)2 cm.
Nowadays, LLR is a primary technique to study the Earth–Moon system and is very important for gravitational physics, geodesy, and studies of the lunar interior.
LLR contributes to the realization of both the terrestrial and selenocentric reference frames. The realization of a dynamical inertial reference frame, in contrast to the kinematically realized frame of very long baseline interferometry (VLBI), offers new possibilities for mutual crosschecking and confirmation.
Since 1969, LLR has supplied many tests of general relativity (GR): LLR data have been used to evaluate geodetic precession [1, 2], probe the weak and strong equivalence principle, determine the parametrized post-Newtonian (PPN) parameters, and address the time change of the gravitational constant G and 1/\(r^2\) deviations of gravitational interactions. LLR has also provided important information on the composition and origin of the Moon through measurement of its rotations and tides. Future lunar missions will expand this broad scientific program.
Initially, the Apollo arrays contributed a negligible portion of the LLR error budget. Today, the ranging accuracy of ground stations has improved by more than two orders of magnitude: the new Apache Point Observatory Lunar Laser-ranging Operation (APOLLO) station at Apache Point, USA, is capable of mm-level range measurements; The Matera Laser Ranging Observatory (MLRO), at the Agenzia Spaziale Italiana (ASI) “Centro di Geodesia Spaziale” in Matera, Italy, has restarted LLR operations. Now, owing to lunar librations, the Apollo arrays dominate the LLR error budget, which is a few cm.
2 The MoonLIGHT Program
LLR has for decades provided the best tests of a wide variety of gravitational phenomena, probing the validity of Einstein’s theory of GR [3, 4]. The lunar orbit is obviously influenced by the gravitational field of the Earth and the Sun, but is also sensitive to the presence of many other solar system bodies.
In 2006, Istituto Nazionale di Fisica Nucleare (INFN) proposed the Moon Laser Instrumentation for General Relativity High accuracy Tests (MoonLIGHT) technological experiment, which has the goal of reducing the error contribution of LLR measurements by more than two orders of magnitude. In Table 1, the possible improvements in the measurement of gravitational parameters achievable through reaching the ranging precision of 1 mm or even 0.1 mm are reported.

Comparison between first and second generation laser retroreflector arrays (LRAs). The librations tilt the arrays (left), but the individual large corner cube retroreflectors (CCRs) are unaffected (right). So, by using the Moon Laser Instrumentation for General Relativity High accuracy Tests (MoonLIGHT) payloads, we receive single short pulses instead of one broadened pulse
The MoonLIGHT program [5] is the result of a collaboration between two teams: the Lunar Laser Ranging Retroreflector Array for the twenty-first century (LLRRA21) team in the USA, led by Douglas Currie of the University of Maryland (UMD), and the Italian one led by National Institute of Nuclear Physics-National Laboratories of Frascati (INFN-LNF). We are exploring improvements in both the instrumentation and the modeling of the CCR.
To explain the MoonLIGHT experiment, we have to understand the limitations of a multi-CCR array.
The main problem that affects the Apollo arrays consists of the lunar librations in longitude, that result from the eccentricity of the Moon’s orbit around Earth [6–8]. Due to this phenomenon, the Apollo arrays are shifted so that one corner of the array is more distant than the opposite corner. Because of the librations tilt, the arrays increase the dimension of the pulse coming back to the Earth (Fig. 1). The broadening of the pulse will be greater proportionally to the array physical dimensions and to the Moon–Earth distance increase. Therefore, for the largest array, from Apollo 15, the enlargement is about 30 cm, and for the Apollo 11 and Apollo 14 arrays, it is about 15 cm. In agreement with this relationship, the pulse enlargement corresponds to a flight time increase:
-
\(\pm \) 0.5 ns for Apollo 15;
-
\(\pm \) 0.25 ns for Apollo 11 and Apollo 14.
In order to solve this problem, LNF in collaboration with UMD, indicated a new design of lunar CCR, named the second generation LLR, whose performance is unaffected not only by lunar librations but also by the motion of the regolith due to its large thermal cycle. The idea that we propose is to move from a multi-CCR array to a series of single, larger CCRs, each with 10 cm of front face diameter (Fig. 2, 3, 4).

Picture of Apollo, first generation and MoonLIGHT/LLRRA21, second generation CCR
Instead of having a single pulse spread by the array and the libration effect, we will have single short pulses coming back with the same dimensions as the incoming one (Fig. 1), with a final laser retroreflector array (LRA) ranging accuracy below 10 \(\mu \)m. When the new CCRs are placed on the lunar surface, it will make sense to improve the station capabilities [9–12].
To summarize, in the past, LLR techniques have employed a large laser pulse fired from the Earth station, larger than array dimensions, which dominated the measurement uncertainty. Now there is a moderately-sized laser pulse, but still a large array, so that the measurement uncertainty is dominated by the array; in the future, with MoonLIGHT/LLRRA21, there will be a single CCR unaffected by librations. The measurement uncertainty will then be dominated by the laser pulse, which could be shortened through modern technology (Fig. 5).

Drawings of the MoonLIGHT CCR with its internal mounting rings, thermal shields, and aluminum housing

Inner conformal shield of the MoonLIGHT CCR

The figure shows which contribution (between fired and retroreflected laser pulse size) dominates the measurement uncertainty; the top horizontal stripe shows the situation in the past; the middle stripe shows the current one and the bottom one the future possible situation with the MoonLIGHT/LLRRA21 CCR
Opportunities for deployment of the MoonLIGHT/LLRRA21 payload will come from the participation of INFN-LNF and UMD, through their national agency programs, to international missions to develop a lunar geophysical network (LGN) [13].
In order to improve the ranging measurement, we have to investigate the technical and fabrication challenges of MoonLIGHT/LLRRA21, through thermal/optical simulations and vacuum chamber tests performed at the INFN-LNF Satellite/lunar/GNSS laser ranging and altimetry Characterization Facility (SCF). Beyond the simulations, we have performed thermal and optical vacuum chamber tests to further validate the design issues.
2.1 SCF_Lab
In 2004, INFN started to build the SCF_Lab in Frascati (Fig. 6. The main purpose of this apparatus is the thermal and optical characterization of CCR arrays in simulated space conditions.

Drawing of the Satellite/lunar/GNSS laser ranging and altimetry Characterization Facility (SCF) cryostat
In Fig. 6, the SCF apparatus is shown. It is a steel cryostat 2 m in length by 1 m in diameter. The inner copper shield is painted with Aeroglaze Z306 black paint (0.95 emissivity and low out-gassing properties) and is kept at T \(=\) 77 K with liquid nitrogen. When the SCF is cold (\(\sim \) 80 K), the vacuum is typically in the \(10^{-6}\) mbar range. Two distinct positioning systems at the top of the cryostat hold and move the prototype in front of the Earth infrared simulator, the solar simulator (SS), the infrared camera, and the laser, all located outside the SCF.
The experimental apparatus is described in great detail in [14, 15].
2.2 SCF Test of the MoonLIGHT CCR
The SCF-Test [14] is a new test procedure to characterize thermal and optical behavior of laser retroreflectors in space for industrial and scientific applications. We perform an SCF-Test on the MoonLIGHT CCR to evaluate the thermal and optical performance in space environment, (Fig. 7).

MoonLIGHT CCR inside the Satellite/lunar/GNSS laser ranging and altimetry Characterization Facility (SCF)
The temperature of the housing has been controlled with resistive tape heaters. For thermal measurements, we use both an infrared (IR) camera and temperature probes, which give real time measurements. The IR camera, through a Germanium window, can give thermograms of all the components of the CCR and its housing.
Instead, to measure the thermal gradient on the CCR surface, we glued three calibrated temperature sensors (silicon diode) along one of the back faces of the CCR, at a separation of 35 mm.
In particular, we look at the temperature from the front face to the tip, studying how the optical response (the far field diffraction pattern, FFDP) of the CCR changes during the different thermal phases. Various configurations and designs of the CCR and the housing have been tested in the SCF facility, with the solar simulator, the temperature data recording with the infrared camera, and the measurement of the FFDP. At the present time, we have a preliminary result indicating that the CCR has a satisfactory performance.
The orientation of the CCR inside the housing is such that one physical edge was parallel to the axis of the SCFs rotation positioning system. We simulated an illumination of the Sun at lower elevations, so the CCR was rotated \(30^\circ \) clockwise and \(30^\circ \) counterclockwise with respect to the SS. We report a total internal reflection breakthrough in one direction, but not in the other. Figures 8 and 9 show the temperature variation of the housing and the intensity variation of the FFDP.

Temperature variation of the housing and relative far field diffraction pattern (FFDP)

Intensity variation of the FFDP during the tests
Looking at Fig. 9, we conclude that the intensity decreases during the phase when the CCR is not orthogonal to the SS, in particular when the Sun enters the housing cavity during the breakthrough phase. This effect is due to a strong increase of the “Tip-Face” thermal gradient during the test (Fig. 10). When the temperature of the housing is allowed to vary, the intensity increases because the “Tip-Face” gradient is reduced.

CCR temperature distribution at noon (orthogonal illumination) with conformal thermal shield
3 Analysis of LLR Data
3.1 Planetary Ephemeris Program (PEP)
In order to analyze LLR data we used the PEP software, developed by the CfA (I. Shapiro et al.) starting from 1970s.
PEP was designed not only to generate ephemerides of the planets and the Moon, but also to compare the model with observations [16, 17]. One of the early uses of this software was the measurement of the geodetic precession of the Moon [1]. PEP can handle several observation types (LLR, radar ranging and doppler, optical positional measurements, transponder measurements, pulsar timing data, and so on). Since we care primarily about LLR observations, we describe the components of a range prediction, though most of the steps along the way are common to other observables as well.
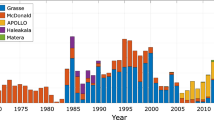
In particular, we are primarily concerned with LLR observations. For this purpose, the software is able to calculate the residuals of the distances between observed LLR data and computed data, derived from the expectations of GR and of terrestrial and lunar geodesy. We have performed a very preliminary analysis of LLR data from three stations: McDonald Observatory in Texas (USA), Grasse in France, and APOLLO [18, 19] in New Mexico (USA). The latter station has been providing the best quality data since 2006. On March 25, 2010, the Matera Laser Ranging Observatory in Italy (MLRO, led by G. Bianco) recorded LLR echoes from the array of Apollo 15.
The histograms in Fig. 11 show photon-by-photon data and are used to form a single LLR “normal point” of the Apollo 15 array taken by the APOLLO station (led by T. W. Murphy) on November 19, 2007. A normal point contains a lot of information, for example, date of observation, atmospheric conditions, as well as time of flight, data quality, and CCR arrays. The APOLLO instrumental accuracy (in terms of laser, detector, timing electronics, and so on) shown by the fiducial returns in Fig. 11 is given by a root mean square contribution of 120 ps (18 mm).

Example run of Apollo 15. In the plot, the top panel shows a 40 ns window of observed round trip time minus the predicted range. Background noise and detector dark current appear as scattered dots, while the lunar return is in the middle. The middle panel shows a histogram of the lunar returns, while the bottom panel shows the local “fiducial” CCR return, fitted by the red Gaussian. The lunar return is additionally spread by the tilted reflector array modeled by the superimposed magenta trapezoidal shape
From a comparison between the middle and the last plot we can see how the tilt in the arrays affects the accuracy of the ranging measurements. The model parameter estimates are refined by minimizing the residual differences, in a weighted least-squares sense, between observations (O) and model predictions (C, stands for “Computed”), O-C. “Observed” is the round-trip time of flight. “Computed” is modeled by the PEP software. PEP software has allowed placing constraints on departures from standard physics. For example, it has been used to place limits on the PPN parameters \(\beta \) and \(\gamma \), the geodetic precession, and the variation of the gravitational constant, \(\frac {\dot G}{G}\). The equations of motion in a space-time with torsion [20, 21] can be included in PEP and constrained with all LLR data, including the newest APOLLO data (at the present time, the published constraints on space-time torsion are calculated using LLR data from other stations).
3.2 Determination of the Geodetic Precession
With PEP, we are able to measure the possible relative deviation of geodetic precession from the GR value (deviation from zero) that is expressed with \(K_{GP}\) parameter (Fig. 12).

\(K_{GP}\) is the relative deviation of geodetic precession from the general relativity (GR) value
Here we show our first determination of the \(K_{GP}\) parameter. We have used all the data available to us from Apollo CCR arrays (Apollo 11, Apollo 14, and Apollo 15). The results are reported in two tables, one until 2003, with data acquired by the old ILRS stations (Table 2) and one with data from 2007 to 2009 acquired by the new APOLLO station (Table 4). Results described in the tables are obtained by fixing \(\frac {\dot G}{G} = 0\) and \(\beta = \gamma = 1\), that is, their value in GR.
Using APOLLO LLR data, the estimated value is consistent with the value obtained using old stations (see Table 3).
The nominal errors returned by the fit are significantly smaller than the value of \(K_{GP}\), and smaller than the best published values. Therefore, we want to use the data to understand and estimate independently the size of the error budget.
We have also performed a fit using every single old station (CERGA: Centre d’Etudes et de Recherches Godynamiques et Astronomiques, MLR2: McDonald Laser Ranging Station, TEXL: Texas Laser Ranging , MAUI: Hawaii Laser Ranging Station). The results are shown in Table 4:
These preliminary measurements are to be compared with the best result published by the Jet Propulsion Laboratory (JPL) (\(K_{GP}=({-}1.9\pm 6.4)\times 10^{-3}\)), obtained using a completely different software package, developed over the past 40 years. On the contrary, after the original 2 % \(K_{GP}\) measurement by CfA in 1988, the use of PEP for LLR has been resumed only since a few years, and it is still undergoing the necessary modernization and optimization.
4 Determination of \(\beta \)
Using LLR data is also possible to measure PPN parameter β that is of great interest. In order to do this, we start from the equivalence principle (EP).
There are two different kinds of EP: weak equivalence principle (WEP that concerns nongravitational contribution to mass) and strong equivalence principle (SEP that extends the WEP to include gravitational self-energy of a body).
In GR, SEP is exact and a possible violation can be expressed by:
where \(\frac {M_G}{M_I}\) is the ratio between gravitational and inertial mass, U is the gravitational energy, and \(\eta \) is a constant expressed by:
Considering the Earth–Moon–Sun system, we have:
where e is relative to the Earth and m is relative to the Moon.
Fitting the data using LLR measurements:
The combination of laboratory experiments of EP [22] with LLR data gives:
Considering the previous equation and the most accurate result of \(\gamma \) [23], the value of the \(\beta \)-parameter is:
Our value of the \(\beta \)-parameter calculated using the PEP software is:
which is consistent with the value obtained by [4].
5 Conclusions and Future Prospects
The analysis of the existing LLR data with PEP is making good progress, thanks to the important collaboration with CfA, as shown with the preliminary measurement of the geodetic precession (de Sitter effect) with an accuracy level of 1 %.
In the future, we are going to enhance our knowledge of data and software in order to better estimate the \(K_{GP}\) uncertainty and other GR parameters. A possible way to improve the precision of LLR measurements is to improve the intercalibration among the stations, that is, to range not only to the Moon but also to satellites around the Earth and primarily to laser geodynamics satellites (LAGEOS).
Before the end of the decade, a robotic mission on the lunar surface will deploy new scientific payloads, which include MoonLIGHT-type laser retroreflectors, and thus extend the LLR reach for new physics in three ways: (i) using a significantly improved second-generation retroreflector design; (ii) increasing by a factor of about 2 the geometric lever arm of LLR with missions to the lunar poles or limbs; (iii) combining LLR payloads with radio/microwave transponders (at least two) for same-beam microwave interferometry (SBI) capable of additional accurate measurements of lunar rotations and librations.
In particular, the single, large, fused-silica retroreflector design developed by UMD and INFN-LNF will improve by a factor of 100 or more the performance of current Apollo arrays, removing in this way the dominant contribution to the LLR error budget. Such a contribution is of the order of 2 cm. It is due to the multi-retroreflector structure of the arrays together with the librations and rotations of the Moon with respect to the Earth. The functionality of this specific new design, which inherits and is evolved from the successful Apollo 11, 14, and 15 experience, is being validated by thermal–vacuum–optical testing in space conditions accurately simulated in the laboratory at the INFN-LNF SCF_Lab.”
References
Shapiro II, Reasenberg RD, Chandler JF, Babcock RW. Measurement of the de Sitter precession of the Moon: a relativistic three-body effect. Phys Rev Lett. 1988;61:2643–6.
Bertotti B, Ciufolini I, Bender PL. New test of general relativity: measurement of de Sitter geodetic precession rate for lunar perigee. Phys Rev Lett. 1987;58:1062–5.
Williams JG, Newhall XX, Dickey Jean O. Lunar moments, tides, orientation, and coordinate frames. Planet Space Sci. 1996;44:1077–80.
Williams JG, Turyshev SG, Boggs DH, Ratcliff JT. Lunar laser ranging science: gravitational physics and lunar interior and geodesy. Adv Space Res. 2006;37(1):67–71.
Dell’Agnello S., Currie D., Delle Monache G, et al. MoonLIGHT: a lunar laser ranging retroreflector array for the 21st century. Paper # GLEX-2012.02.1.7x12545 in Proceedings of the Global Lunar Exploration Conference; May 2012; Washington, USA.
Alley CO, Chang RF, Currie DG, Mullendore J, Poultney SK, Rayner JD, Silverberg EC, Steggerda CA, Plotkin HH, Williams W, Warner B, Richardson H, Bopp B. Apollo 11 laser ranging retroreflector: initial measurements from the McDonald observatory. Science. 1970;167(3917):368–70.
Chang RF, Alley CO, Currie DG, Faller JE. Optical properties of the Apollo laser ranging retroreflector arrays. Space Res XII. 1971;1:247– 59.
Bender PL, Currie DG, Dicke RH, Eckhardt DH, Faller JE, Kaula WM, Mulholland JD, Plotkin HH, Poultney SK, Silverberg EC, Wilkinson DT, Williams JG, Alley CO. The lunar laser ranging experiment. Science. 1973;182(4109):229–38.
Currie D, Dell’Agnello S, Delle Monache G. A lunar laser ranging retroreflector array for the 21st century. Acta Astronaut 2011;68:667–80.
Lops C, Martini M. Horizons in Earth science research. Vol. 5. New York: Nova; 2011. (ISBN: 978-1-61209-923-1).
Martini M, et al. Probing gravity with second generation Lunar Laser Ranging. Talk for the XIII LNF Spring School in Nuclear, Subnuclear and Astroparticle Physics, Frascati, 12–16 May 2008.
Lops C. et al. Probing gravity in Near Earth orbits with LAGEOS and LARES. Talk for the XIII LNF Spring School in Nuclear, Subnuclear and Astroparticle Physics, Frascati, 12–16 May 2008.
A scientific concept for the LGN has been developed by the International Lunar Network (see http://iln.arc.nasa.gov/). See Core Instrument and Communications Working Group Final Reports.
Dell’Agnello S, et al. Creation of the new industry-standard space test of laser retroreflectors for the GNSS and LAGEOS. Adv Space Res. 2011;47:822–42. http://ilrs.gsfc.nasa.gov/docs/ETRUSCO_PaperPublished_JASR.pdf.
Dell’Agnello S. ETRUSCO-2: An ASI-INFN project of technological development and SCF-Test of GNSS LASER retroreflector arrays. 3rd International Colloquium on Scientific and Fundamental Aspects of the Galileo Programme; August 2011; Copenhagen, Denmark. http://ilrs.gsfc.nasa.gov/satellite_missions/list_of_satellites/ga01_reflector.html.
Chandler JF, Reasenberg RD, Shapiro II. On recent developments in theoretical and experimental general relativity, gravitation, and relativistic field theories. In: Jantzen RT, Mac Keiser G, Ruffini R, editors. Proceedings of the Seventh Marcel Grossman Meeting; 24–30 July 1994; p. 1501; Stanford, USA; 1996.
Battat JBR, Chandler JF, Stubbs CW. Testing for Lorentz violation: constraints on standard-model-extension parameters via lunar laser ranging. Phys Rev Lett. 2007;99:241103, arXiv:0710.0702.
Battat JBR, Murphy TW, et al. The Apache Point Observatory Lunar Laser-ranging Operation (APOLLO): two years of millimeter-precision measurements of the Earth-Moon range. Publications of The Astronomical Society of the Pacific, 2009;121:29–40.
Murphy Jr. TW, Adelberger EG, Strasburg JD, Stubbs CW. APOLLO: Multiplexed Lunar Laser Ranging. 13th international workshop on laser ranging; October 2002; Washington DC, USA. http://physics.ucsd.edu/~tmurphy/apollo/doc/multiplex.pdf.
March R, Bellettini G, Tauraso R, Dell’Agnello S. Constraining spacetime torsion with the Moon and Mercury. Phys Rev D. 2011;83:104008.
March R, Bellettini G, Tauraso R, Dell’Agnello S. Constraining spacetime torsion with LAGEOS. Gen Relativ Gravit. 2011;43(11):3099–126.
Baessler S, Adelberger EG et al. Improved test of the equivalence principle for gravitational self-energy. Phys Rev Lett. 1999;83:3585.
Bertotti B, Iess L, Tortora P. A test of general relativity using radio links with the Cassini spacecraft. Nature. 2003;425:374–6.
Acknowledgements
We thank Ryan Heller, Griffin Hosseinzadeh (DOE/INFN Summer Exchange Program for 2012), and Chiara Mondaini for the English revision of this chapter.
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2016 Springer International Publishing Switzerland
About this chapter
Cite this chapter
Martini, M., Dell’Agnello, S. (2016). Probing Gravity with Next Generation Lunar Laser Ranging. In: Peron, R., Colpi, M., Gorini, V., Moschella, U. (eds) Gravity: Where Do We Stand?. Springer, Cham. https://doi.org/10.1007/978-3-319-20224-2_5
Download citation
DOI: https://doi.org/10.1007/978-3-319-20224-2_5
Published:
Publisher Name: Springer, Cham
Print ISBN: 978-3-319-20223-5
Online ISBN: 978-3-319-20224-2
eBook Packages: Physics and AstronomyPhysics and Astronomy (R0)