
Abstract
Wind energy, being the fastest growing renewable energy source in the present world, requires a large number of wind turbines to transform wind energy into electricity. One factor driving the cost of this energy is the reliable operation of these turbines. Therefore, it is a growing requirement within the wind farm community, to monitor the operation of the wind turbines on a continuous basis so that a possible fault can be detected ahead of time. As the wind turbine operates in an environment of constantly changing wind speed, it is a challenging task to design a fault detection technique which can accommodate the stochastic operational behavior of the turbines. Addressing this issue, this paper proposes a novel fault detection criterion which is robust against operational uncertainty, as well as having the ability to quantify severity level specifically of the drivetrain abnormality within an operating wind turbine. A benchmark model of wind turbine has been utilized to simulate drivetrain fault condition and effectiveness of the proposed technique has been tested accordingly. From the simulation result it can be concluded that the proposed criterion exhibits consistent performance for drivetrain faults for varying wind speed and has linear relationship with the fault severity level.
Access provided by Autonomous University of Puebla. Download conference paper PDF
Similar content being viewed by others

Keywords
1 Introduction
The decrease of the fossil fuel reserve and climate concerns leads the world to concentrate more on harvesting renewable energy. Among these renewable sources, wind power has the highest total installed capacity around the world after the hydropower. The global wind power generation capacity was 318.14 GW by the end of 2013 with an installation of 35 GW during the year 2013 [1]. This large amount of energy is produced through the continuous operation of more than 225,000 wind turbines (WTs) around the world [2]. The cost of the wind energy is dependent on the reliability of operation of the existing turbines. According to a survey, the operation and maintenance cost accounts for 10–30 % of the total cost of energy [3, 4]. Moreover, to meet the targeted electricity production, offshore wind farms are a strongly growing component with larger turbines which may not be accessible during part of the year. These large wind turbines exhibit greater failure rate which accounts for 25–30 % of the overall energy generation cost with a considerable component for unscheduled maintenance [5]. The overall cost of maintenance can be considerably reduced through the optimization of the existing operation and maintenance approach. This has the potential to reduce unscheduled maintenance, parts replacement cost and overall downtime and thus increases the reliability and cost effectiveness of wind energy.
At present, there are two commercial approaches available for the condition monitoring of WTs. One of these two is supervisory control and data acquisition (SCADA) system based while, the other one uses purpose-designed condition monitoring system (CMS) [6]. The SCADA is a conventional plant monitoring system used to monitor important plant parameters at an average interval of 10 min and send it to the control center, for recording and visualization, where a human operator usually monitors the operational behavior of the system and acts accordingly. This SCADA system, actually adopted from other industries, often does not sufficiently consider the particularities of WT operation, thus, causing false alarm. Moreover, there is a lack of data analysis tools for SCADA based WT monitoring system [6]. On the other hand, in-depth continuous monitoring as well as diagnosis of abnormal operation of a WT is possible using the CMSs, which is specially designed for the WTs. A number of CMSs are now available commercially to monitor tower, blades, bearings, gearbox and generator of a WT. To improve performance of the present CMSs, investigations are ongoing which have been summarized in [7]. Essentially, the capability of a condition monitoring system depends on the type of sensor used and associated signal processing methods applied to extract the condition related information from the sensor signal. The conventional CMSs perform the task of monitoring a WT by measuring vibration, acoustic emission (AE), process parameters like temperature and speed, gear oil contamination and strain. However, the electrical signature analysis (ESA) approach has also been employed recently for the condition monitoring and fault diagnosis of the WT. This technique uses electrical signals like current, voltage and power to monitor the condition of WT generator and drive train related components. No additional sensor is required for this technique as the electrical signals are readily available in a commercial WT. Moreover, it can be applied to diagnose both electrical and mechanical faults of a WT [4, 8–12].
The ESA based condition monitoring techniques, discussed in [4, 9, 12], proposed criterion parameters for online monitoring of the WT operational condition while diagnosis of abnormal operation was achieved by simply observing the variation of criterion parameters or time-frequency analysis of relevant electrical quantities. Yang et al. proposed the ratio of torque and speed of the generator as a criterion for detecting faults in the drivetrain of a permanent magnet synchronous generator (PMSG) based wind turbine [9]. Another publication suggested three criterion parameters, which are calculated using the current, voltage and power output of a WT and employed their patterns to identify and distinguish between electrical and mechanical faults of WT drive train containing a wound rotor induction generator [12]. As well, Yang in [4], proposed the instantaneous variance (IV) of electrical quantities as a criterion for condition monitoring and fault diagnosis of PMSG based WT. In that research, the IV of the power output was monitored for detecting abnormality in the WT drivetrain. Although the existing condition monitoring criteria, as discussed above, show sensitivity to any abrupt fault related change of WT operation, they suffer from two major shortcomings: (i) the criteria are not independent of the speed variation, i.e., the non-stationary operating nature of the wind turbine is not well accommodated while developing these criteria, and, (ii) direct measurement of fault severity level is not possible from the magnitude of the criteria. Considering these limitations of the previous research, a novel condition monitoring parameter, sensitive to fault severity as well as robust against the speed variation of WTs, is proposed in this paper. The usefulness of the proposed criterion parameter has also been validated using simulation results.
The remaining sections of this paper are organized as follows. In Sect. 2, a novel criterion for the continuous monitoring of WT drivetrain is proposed. Section 3 describes the wind turbine model that is used for the simulation experiments. It also describes the fault model that is utilized for validating the effectiveness of the proposed criterion. In Sect. 4, simulation results are presented along with necessary analysis and comparison with existing criterion. Section 5 contains the concluding remarks and future work plan.
2 Condition Monitoring Criterion
The criteria parameters, as developed in this paper, are based on the previously published research presented in [9]. A brief description of that development is presented here for ease of discussion. Consider a wind turbine (Fig. 1) based on synchronous generator where the wind power (P r) received by the WT blade-rotor system is fed to the generator through a gearbox. The mechanical torque (T r) of the rotor flows to the generator shaft and becomes T g after experiencing losses in the drive train which is quantified as T l. In case of higher capacity WTs torque, the loss can be neglected as it is small enough compared to T r. Therefore, torque produced by the synchronous generator equates the rotor torque.

A simplified diagram of wind turbine generator and drivetrain
Using the approximation of negligible stator resistance (R a ) it is shown in [9] that,
where, ω g and X a are respectively angular speed and synchronous reactance of the generator.
Torque and speed transducers are used in [9] to get shaft torque and angular speed of the synchronous generator. However, indirect method of generator torque estimation is also available through the measurement of stator current, shaft angular position and magnetic flux. The condition monitoring criterion C is defined in [9] as a ratio of T r and ω r .
where, ω r = ω g /N g and N g represents the gearbox ratio. As reported in [9], the WT drivetrain mechanical faults put a trace in C as torque and speed of the generator is affected by the faults. Again, using (2) and (3) the relationship between C and X a can be found which implies that electrical faults occur in winding should also be detected by monitoring shape of C. The authors in [9] provided practical experimental results to support their claim. The experiments were performed on a laboratory prototype of WT synchronous generator drivetrain. Keeping the above mentioned technique in mind, let us consider the typical power-speed characteristics (Fig. 2) of a variable speed WT drawn for different wind speed (v w ), where the quantities are expressed in per unit (p.u). Here, P r and ω r are the mechanical power and angular speed of the turbine respectively. It is evident that, for every wind speed (v w ) there is an optimum value of angular speed for which maximum power production is possible. These points in the curve are designated as the maximum power points (MPPs). To extract maximum available power from the wind at different wind speed, the WT must be operated on the trajectory of MPPs which can be represented by the following relationship [13].

Power-speed characteristics of a wind turbine at different wind speed [13]
The mechanical power (P r) can also be expressed in terms of the torque and angular speed.
Using Eqs. (4), (5) and (1), the relationship between generator torque and speed can be readily obtained as,
In fact, the control system of a WT performs the job of tracking MPPs according to Eq. (6) by controlling electrical loading of the generator. Equation (6) can be rewritten as,
where K′ is a turbine specific constant.
Now, using Eqs. (1) and (7) in Eq. (3), we get the following representation of condition monitoring criterion C.
Here, K is also a constant. Equation (8) suggests that, the shape of criterion C would be similar to the generator speed. Therefore, it is possible to detect a drivetrain fault using C if the generator speed ω g is affected by the fault. However, the fault related transient variation of the speed ω g would be submerged in the overall speed signal collected by associated transducer. Moreover, in case of a variable speed WT the speed of the generator is not a constant value. Therefore, the possibility of detecting a drivetrain fault using C exists only after rigorous processing of its signal. It limits the use of C as a standalone criterion for fault detection while WT is in operation. To overcome this limitation, we are proposing a new criterion parameter, named as fault indicator (FI) hereafter, which is based on the relationship between T g and ω g as applied in the control system of WTs. Using Eqs. (4–7), the FI is defined as follows.
Essentially, FI tracks the change of K with respect to time. It is possible for the K to change in case of a WT as the fault related momentary change of the generator shaft speed causes to break up the linear relationship between T g and ω 2 g for that time instance. Therefore, FI would be an efficient fault detector as it only responds to the fault related disturbance of the generator shaft speed. Simulation experiment of a drivetrain fault has been carried out to evaluate performance of FI, which is presented in the result section.
3 Wind Turbine Model
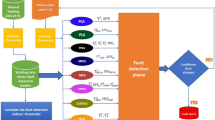
The wind turbine model used in this paper, can be found in [14], which represents a realistic generic three-bladed pitch-controlled variable-speed wind turbine with a nominal power of 4.8 MW. It consists of four parts (Fig. 3), the blade and pitch system, drivetrain including gearbox, combined generator-converter model, and WT controller. The benchmark model describes the operation of a wind turbine at a system level with simplified model of converter and pitch system, rigid blades and tower, and a static model for WT aerodynamics. The WT controller, used in the model, performs the task of following the power reference (P ref). In case of low wind speed the controller tries to optimize the power generation by tracking the MPPs using torque control method. At high wind speed the controller changes the pitch (β) of turbine blades to maintain nominal rotor speed while producing rated power. A more detailed description of different components of the benchmark model as well as their operation can be found in [14]. This benchmark model also provides the opportunity to observe the behaviour of a WT in case of several system faults along with normal operating performance.

Representation of a 4.8 MW wind turbine benchmark model (‘m’ in the subscript refers to measured quantity) [14]
As mentioned earlier, the WT benchmark model has a gearbox with gear ratio N g in its drivetrain. Let us consider, the gearbox consists of a planetary stage and a parallel stage with gear ratio of N g1 and N g2 respectively. Here,
In this work, gearbox fault is introduced in the drivetrain of the benchmark model as a representative of the drivetrain fault. A subsequent study has been carried out to investigate how FI responses to the normal as well as fault condition.
3.1 Gearbox Fault Model
The gearbox fault is realized by the tooth breakage in the gear attached to the generator driving shaft. In fact, while the gearbox is in operation, a broken tooth causes a gap between teeth of the two mating gear (Fig. 4), which in turn, translates mechanically to a transient variation of the shaft angular speed beyond that of other tooth-tooth contact [15]. As the generator shaft torque has a relationship with the gear speed through other system components and characteristics, an effect of the gear fault is expected on the torque signal also. In the referred WT model, the only input from drivetrain to generator is the shaft angular speed (ω g ). Therefore, kinematic error in gears, caused by the tooth breakage, is realized here as a disturbance in ω g . This disturbance, named hereafter as angular speed error Δω g , is determined based on the following assumption.
where t p corresponds to the time required for passing a tooth by the mating gear whereas d th corresponds to the circular tooth thickness. According to Eq. (11), in a gear system, the time required for passing a tooth is proportional to the circular thickness of the tooth. In this work, gear fault is introduced in the generator shaft gear as a uniform reduction of d th .

Healthy gear set (left) and faulty gear set with tooth breakage (right) (HSS high speed shaft, LSS low speed shaft) [15]
Let us consider that, the parallel stage has a low speed and high speed shaft, with respectively, n l and n h number of teeth. To simulate fault situation, one of the teeth of the high speed shaft, mentioned earlier as generator shaft, is assumed to have a reduced tooth thickness of \( d_{th}^{\prime } \). Therefore, reduction of circular thickness, in percentage, can be considered as the size of gear tooth defect which is regarded as d s .
If the time required for passing healthy and faulty tooth are t p and t′ p , respectively, then from Eqs. (11) and (12) it can be written that,
Again, t p can be expressed in terms of n h and corresponding shaft speed ω g .
Now, the angular speed error Δω g , caused by the faulty tooth can be calculated by using Eqs. (13) and (14) as,
To simulate gearbox fault, Δω g is introduced in the shaft speed signal when a faulty tooth appears to its mating gear.
4 Simulation Results and Discussion
The simulation experiments have been carried out in MATLAB Simulink environment utilizing the WT benchmark model available in [16]. Properties of all the model parameters can be found in [14]. It should be mentioned here that, instead of using the fault scenarios presented in [14], only the drivetrain gearbox fault has been studied in this work following the above mentioned gearbox fault model. Properties of the gearbox related parameters are listed in Table 1.
For the simulation experiments, a predefined wind speed sequence is used which consists of real measurements from a wind farm. More details about the wind data can be found in [14]. Simulation has been performed to evaluate effectiveness of the proposed condition monitoring criterion FI in case of detecting fault at varying wind speed as well as measuring defect severity. The simulation results are shown in Figs. 5 and 6, for two different wind sequences each of 200 s length. The major WT operation related parameters along with the condition monitoring criteria are also included in the illustration. In the first case (Fig. 5) wind data varied between moderate and low speed which is apparent in the WT power output (Fig. 5b). In this case, WT controller controls generator torque to run it at maximum power points, therefore, generator speed is also varied. During some portion of these simulations the generator shaft gear is considered to have a defective tooth with a defect size of 0.1 %. The fault and normal situation is represented in the figure by the fault marker. The low value of fault marker represents a defect in the gear tooth, whereas, a high value corresponds to normal condition. As seen from Fig. 5e the condition monitoring criterion C shows a varying value during the WT operation from which no clear indication of fault occurrence can be obtained. The shape of C, as expected from Eq. (8), resembles generator speed signal. In contrast, the condition monitoring criterion FI, as proposed in this work, can efficiently indicate the abnormal situation (Fig. 5f). For normal situation FI takes the values around zero, as the relationship in Eq. (7) holds well. At the time of fault occurrence, FI responses to the change of relationship between generator torque and speed, that is reflected in its shape. The varying value of FI thus determines an abnormality in the drivetrain operating behaviour. Another useful feature of FI signal, during a fault situation, is the consistency in its shape irrespective of the speed variation. From Fig. 5f it can be easily noticed that, amplitude of the FI remains between −15 and +15 although the generator speed is not constant during this time.

Simulation results for low and moderate wind speed while d s = 0.1 %; a wind speed, b power output of wind turbine, c generator speed, d generator torque, e condition monitoring criterion C, f proposed condition monitoring criterion FI

Simulation results for high wind speed while d s = 0.1 %; a wind speed, b power output of wind turbine, c generator speed, d generator torque, e condition monitoring criterion C, f proposed condition monitoring criterion FI
For further investigation on the FI performance during nearly constant generator speed, Fig. 6 illustrates a situation where the wind speed is mostly above the WT rated speed. As a result, pitch controller takes over control of the WT and tries to maintain generator speed at the rated level (Fig. 6c) by changing pitch of turbine blades. As a result, power output of the wind turbine is nearly constant at the rated level as shown in Fig. 6b. Response of criterion C (Fig. 6e), again, shows similarity with generator speed, thus makes the fault and normal situation undistinguishable. On contrary, the FI signal shows distinct responses in case of normal and fault condition as shown in Fig. 6f. At the gear fault instances, again, amplitude of FI stays between −15 and +15.
For a more comprehensive investigation on FI response to gear fault at different wind speed, simulation has been performed for 11 different wind data sequences each of 200 s length at a fixed gear defect level of 0.1 %. In this analysis, to quantify fault sensitivity of FI, fault irrelevant peaks are first eliminated from FI signal by using appropriate threshold. Then severity index (SI) is determined according to the following equation.
here, A p (i) corresponds to a peak in the processed FI signal and N is the total number of peaks found.
A plot of severity indices for the 11 different cases is shown in Fig. 7. An approximately constant value of SI is obtained for most of the cases which represents robustness of the criterion FI against wind speed variation. From Fig. 7 another characteristic of FI can be obtained, that is, value of severity index can be a representative of defect size of the gear tooth. Further investigation has been done to confirm this issue where the simulation was performed for different gear defect size using the same wind data sequence. The result is shown in Fig. 8 which represents the values of SI for defect size ranging from 0.1 to 1 %. A linear relationship between the severity index and defect size is evident from this illustration. Therefore, SI, determined from the FI signal can efficiently measure the level of defect occurred in the drivetrain gear.

Plot of severity index (SI) for different wind data sequences while d s = 0.1 %

Plot of severity index (SI) for different defect sizes (d s = 0.1–1 %) of the gear tooth
5 Conclusions
In this work, a novel condition monitoring criterion, named as fault indicator, has been proposed which is capable of detecting abnormality in the WT drivetrain while exhibiting robustness against the variable speed turbine operation. The level of defect can also be diagnosed by a severity index, calculated from the fault indicator. A benchmark WT model with a gear tooth fault is simulated to evaluate performance of the proposed criterion. Obtained results ensure its effectiveness at distinguishing normal and fault condition in the gearbox, which is not affected by the wind speed. In addition, the severity index shows a linear response to gear tooth defect size thus enables identification of fault severity level. Performance evaluation of the proposed fault indicator in case of other drivetrain faults like bearing fault and unbalance is under study. Note that, laboratory experiments will be performed in a near future by using a practical WT drivetrain to demonstrate feasibility of fault detection using the proposed criterion.
References
Council, G.W.E. (2014) Global wind statistics. Global Wind Energy Council, Brussels
Council, G.W.E. (2014) Wind in numbers. http://www.gwec.net/global-figures/wind-in-numbers/. Accessed 10 Mar 2014
Walford CA (2006) Wind turbine reliability: understanding and minimizing wind turbine operation and maintenance costs. Sandia National Laboratories, Albuquerque
Yang W (2014) Condition monitoring the drive train of a direct drive permanent magnet wind turbine using generator electrical signals. J Sol Energy Eng 136(2):021008
Wiggelinkhuizen E et al (2008) Assessment of condition monitoring techniques for offshore wind farms. J Sol Energy Eng 130(3):030301.1–031020.12
Yang W et al (2014) Wind turbine condition monitoring: technical and commercial challenges. Wind Energy 17(5):673−693
García Márquez FP et al (2012) Condition monitoring of wind turbines: techniques and methods. Renew Energy 46:169–178
Yang W et al (2010) Cost-effective condition monitoring for wind turbines. IEEE Trans Indus Electr 57(1):263–271
Yang W, Tavner PJ, Wilkinson MR (2009) Condition monitoring and fault diagnosis of a wind turbine synchronous generator drive train. Renew Power Gener IET 3(1):1–11
Watson SJ et al (2010) Condition monitoring of the power output of wind turbine generators using wavelets. IEEE Tran Energy Convers 25(3):715–721
Gong X, Qiao W (2013) Bearing fault diagnosis for direct-drive wind turbines via current-demodulated signals. IEEE Trans Industr Electron 60(8):3419–3428
Yang W, Tavner PJ, Court R (2013) An online technique for condition monitoring the induction generators used in wind and marine turbines. Mech Syst Signal Process 38(1):103–112
Wu B et al (2011) Power conversion and control of wind energy systems, vol 77. Wiley, New York
Odgaard PF, Stoustrup J, Kinnaert M (2013) Fault-tolerant control of wind turbines: a benchmark model. IEEE Trans Control Syst Technol 21(4):1168–1182
Strangas EG (2013) Response of electrical drives to gear and bearing faults—diagnosis under transient and steady state conditions. In: Proceedings of IEEE workshop on electrical machines design control and diagnosis (WEMDCD) pp. 289−297
Odgaard PF (2014) Wind turbine benchmark model for fault detection, isolation and accommodation. http://www.kk-electronic.com/wind-turbine-control/competition-onfault-detection/wind-turbine-benchmark-model.aspx. Accessed 24 Feb 2014
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2015 Springer International Publishing Switzerland
About this paper
Cite this paper
Shahriar, M.R., Wang, L., Kan, M.S., Tan, A.C., Ledwich, G. (2015). Fault Detection of Wind Turbine Drivetrain Utilizing Power-Speed Characteristics. In: Amadi-Echendu, J., Hoohlo, C., Mathew, J. (eds) 9th WCEAM Research Papers. Lecture Notes in Mechanical Engineering. Springer, Cham. https://doi.org/10.1007/978-3-319-15536-4_12
Download citation
DOI: https://doi.org/10.1007/978-3-319-15536-4_12
Published:
Publisher Name: Springer, Cham
Print ISBN: 978-3-319-15535-7
Online ISBN: 978-3-319-15536-4
eBook Packages: EngineeringEngineering (R0)