
Abstract
Attack trees are widely used in the fields of defense for the analysis of risks (or threats) against electronics systems, computer control systems or physical systems. Based on the analysis of attack trees, practitioners can define actions to engage in order to reduce or annihilate risks. A major barrier to support computer-aided risk analysis is that attack trees can become largely complex and thus hard to specify. This paper is a first step towards a methodology, formal foundations as well as automated techniques to synthesize attack trees from a high-level description of a system. Attacks are expressed as a succession of elementary actions and high-level actions can be used to abstract and organize attacks into exploitable attack trees. We describe our tooling support and identify open challenges for supporting the analysis of risks.
Access provided by Autonomous University of Puebla. Download conference paper PDF
Similar content being viewed by others


Keywords
These keywords were added by machine and not by the authors. This process is experimental and the keywords may be updated as the learning algorithm improves.
1 Introduction
Ensuring the security of an information system means guaranteeing data availability, integrity and confidentiality. In this perspective, a preliminary study of the system and its environment, called risk analysis, is necessary [4, 13]. The discipline of risk analysis aims to identify and evaluate risks that threaten a given system. Current methods follow mostly the same outline: practitioners decompose the system into subsystems and produce a model, then draw up a list of feared events, and finally determine the potential reasons of the realization of these events. The NATO report [11] showed that the current methods are ill-suited to manage the security of complex systems. Formal methods, well-defined formalisms, and analysis tools have the potential to eliminate current barriers. In particular, attack trees are widely used in the fields of defense for the analysis of risks (also called threats) against electronics systems, computer control systems or physical systems [1, 8, 9, 12, 14, 15, 18]. Based on the analysis of attack trees, practitioners can define actions to engage in order to reduce or annihilate risks.
Up to now, the construction of attack trees is made by hand, based on knowledge and experiences of analysts and technicians. There are construction and editing tools of attack trees available (e.g., [1, 14, 15]). This manual effort is time-consuming and error-prone, especially as the size of attack trees can become substantial. Our goal is to create an automated process able to assist practitioners in fulfilling the modeling task. This paper reports on the first steps towards a methodology, the formal foundations as well as automated techniques to synthesize attack trees from a high-level description of a system. Though attack trees have deserved a lot of attention [6–10, 12, 18], we are unaware of existing approaches for (semi-)automatically synthesizing attack trees. Hong et al. [3] have addressed synthesis of attack trees, but in a setting lacking the precious hierarchy of actions that enforces the structure of the attack trees. As a result, there is no control over the outcome: deeply flattened and hard to exploit trees can be obtained, precluding a further exploitation by risk analysts and domain experts. For computer system security, Jha et al. [5] and Sheyner et al. [16, 17] proposed an algorithm to automatically generate an attack graph representing the system under consideration. In our case, attack graphs are generated from a description of a system (e.g., a military building). Our methodology allows the user to specify the intended structure through a hierarchy of actions, with flexibility on the adequate level of abstraction to choose. Moreover we do not synthesize scenarios graphs but attack trees.
Our proposed methodology consists in (1) describing the system to protect as an attack graph (AG); (2) extracting the attacks (the solution-paths going from an initial state to a final/goal state); (3) gathering all attacks into an attack tree. The exploitation of a high-level specification (e.g., a military building) raises the level of abstraction – practitioners (experts of a domain) can more easily express their knowledge and defense objectives. Moreover automating the approach ensures that the presence of all attacks under study are present in the attack tree. We notice, though, that a fully automated synthesis is likely to produce unexploitable (e.g., deeply flatten) trees. Mauw and Oostdijk [9] showed that numerous structurally different attacks trees can capture the same information, out of which a few are readable and meaningful for an expert. An original and crucial feature of our methodology is the support of high-level actions to specify how sequences of actions can be abstracted and structured – a high-level action can be seen as a sub-goal. Likewise experts can control the synthesis process and obtain attack trees close to what they have in mind. We formalize hierarchies of actions and use standard pattern-matching techniques to compute a so-called strategies of the attacks (corresponding to attack suites in [9]), that provide abstractions of the attack descriptions. The methodology comes with an environment and a set of languages for generating attacks, specifying high-level actions, and synthesizing attack trees. We illustrate the synthesis process in the context of analyzing risks of a military building. We also identify some open challenges for fully supporting the approach.
Remainder of the Paper. Section 2 introduces a running example in the context of military defense. Section 3 describes background information and notations used throughout the paper. Section 4 defines attack graphs before introducing in Sect. 5 hierarchy of actions, strategies, and attack trees. Section 6 summarizes the paper and describes future works.
2 Motivation and Running Example
To illustrate the motivation of our work, let us consider the example of Fig. 1. Military experts want to protect an armoury, i.e., they do not want that the stored weapons fall into the wrong hands. For the sake of risk analysis, we put ourselves in the attacker’s shoes and look for the ways to intrude the military building. The armoury consists of six rooms, including a hall monitored by a video equipment and the storage room. The building is guarded by defenders: the attacker (ATK) may meet an agent in one of the rooms, a dog in another. The goal of the analysis is then to find all the relevant paths to reach the weapons. Relevant means here that we would like to get the successful attacks that are realistic (no invisibility cloak) and without loops – we would like to avoid the cases where the attacker goes from a room (say A) to the next room (say B), goes back to A, then goes to B, and so on. An example of path, among many others, is that the attacker can cross the hall to go directly into the storage room; to make sure he or she has not been seen, the attacker can cut the video surveillance system. The building of Fig. 1 involves 17 elements (seven doors, five windows, three agents, one camera and the arsenal). The number is substantial since numerous paths and attacks can be envisioned. In practice the complexity can be even higher. The goal of the project we are involved in is to assist military experts in synthesizing attack trees. Specifically we want to generate attacks from the description of a system (e.g., military building) and synthesize, with the help of some directives, a readable attack tree that military experts can exploit afterwards.

The plan of the armoury to protect
Running Example. In the rest of the paper, we will only consider the end of the attack, that is, the intrusion in the storage room. In our running example (Fig. 1), the system consists in a simple room and an attacker who still wants to intrude to steal the weapons located in a locked cabinet of this room. To describe the states of the system, we define the following three two-valued variables: \(Pos(ATK) \in \{out., room\}\) (\(out.\) stands for \(outdoor\)) which gives the position of the attacker in the system at each moment, \(room \in \{opened, closed\}\) which describes the door status, and \(cabinet\in \{opened, closed\}\) which tells whether the weapons are easy to reach or not.
3 Preliminary Notations
For a set \(X\), we let \(X^*\) be the set of finite sequences over \(X\), and we denote by \(\epsilon \) the empty sequence. Given two sequences \(s_1,s_2 \in X^*\), we let \(s_1.s_2 \in X^*\) denote the concatenation of \(s_1\) and \(s_2\). For \(x \in X\), we will simply write \(x\) for the set \(\{x\} \subseteq X^*\). Given a sequence \(s \in X^*\) and \(Y \subseteq X^*\) a set of sequences over \(X^*\), we let \(s.Y\) denote the sequences \(s,s'\) where \(s' \in Y\) and we \(s^{-1}.Y\) be the set of sequences \(s' \in X^*\) such that \(s.s'\in Y\). For two subsets \(Y\) and \(Z\) of \(X^*\), we let \(Y.Z = \bigcup _{s \in Y} s.Z\); it is the set of sequences obtained by concatenating a sequence in \(Y\) with a sequence in \(Z\). We now recall trees, labeled trees and forests.
A tree is a finite set \(T \subseteq \mathbb N^*\) of nodes such that: \(t.i\in T\) implies \(t\in T\) (prefix-closeness), and \(t.i\in T\) implies \(t.j\in T\), for all \(1\le j < i\) (left-closeness).
A node \(t\in T\) is a leaf if \(t.1 \notin T\); we write \(leaves(T)\subseteq T\) the set of leaves of \(T\). We let \(\deg (t)\) be the greatest \(n\) such that \(t.n \in T\). We write \(children(t)\) for the sequence of ordered children of \(t\) in \(T\), i.e., the sequence \(t.1 \ldots t.\deg (t) \in T^*\). A branch of \(T\) is a sequence \(i_1i_2\ldots i_m\) such that \(i_1i_2\ldots i_m \in leaves(T)\).
Let \(\varGamma \) be a set. A \(\varGamma \) -labeled tree is a structure \(\tau =(T,\ell )\) where \(T\) is a tree, and \(\ell : T\rightarrow \varGamma \) is the labeling function; Figs. 3(a) and (b) depicts two labeled trees \(\tau _1\) and \(\tau _2\). We write \(w(\tau )\in \varGamma ^*\) for the sequence of labels of leaf nodes of \(\tau \) ordered from left to right. Given a \(\varGamma \)-labeled tree \(\tau =(T,\ell )\) and a node \(t \in T\), we let \(\tau _t=(T_t,\ell _t)\) be the sub-tree of \(\tau \) rooted at node \(t\) defined by \(T_t=t^{-1}T\) and \(\ell _t(t')=\ell (t.t'), for\ all\ t'\in T_t\).
A \(\varGamma \) -forest is a finite ordered set \(\{\tau _i\}_{i\in I}\) of \(\varGamma \)-labeled trees.
4 Attack Graphs
We use a standard symbolic representation for dynamic systems, where states are characterized by valuations over a finite set of variables (ranging over a finite domain) and transitions between states correspond to actions.
Figure 2 describes the system of our running example: each state, although numbered, is characterized by a valuation of the relevant variables. Initial states are marked by an ongoing arrow and goal states (those the attacker wants to reach) by double row. We can navigate in this graph following arrows that realize actions; label \(tc/fl\) means that either action \(tc\) or action \(fl\) can be chosen.

The AG \(\mathcal{G}_{ex}\)
Definition 1
An Attack Graph (AG) over a set of actions \({\mathbb A}\) is a structure \(\mathcal{G}=(S,f, I, G)\), where \(S\) a finite set of states, \(f:S\times \mathbb A\rightarrow S\) a partial transition function, \(I\subseteq S\) is a set of initial states, and \(G\subseteq S\) is a set of goal states.
The AG \(\mathcal{G}_{ex}=(S,f, I, G)\) of Fig. 2 is formally defined by:
-
\(S=\{1,2,3,4,5,6,7,8\}\): each state of the system is composed of a combination of the possibles of the variables.
-
\(I=\{1,5\}\): the initial sy tates are the states where \(Pos(ATK)= out.\) and \(room=closed\).
-
\(G=\{7,8\}\): the final states are the states where attacker is inside and the cabinet opened.
-
\({\mathbb A}=\{tc,fl,od,cd,go_{in},go_{out},uk,lk,ti\}\) is the set of primitive actions, which respectively means:
Action
Meaning
tc
type the code (door opener)
fl
force the lock
od
open the door
cd
close the door
\(go_{in}\)
go inside
\(go_{out}\)
go outside
uk
use a key to open the cabinet
lk
lock the cabinet with a key
ti
take item (weapon)
-
\(f : S\times {\mathbb A}\rightarrow S\) the partial transition function
\(f_{tc}\)
\(f_{fl}\)
\(f_{od}\)
\(f_{cd}\)
\(f_{go_{in}}\)
\(f_{go_{out}}\)
\(f_{uk}\)
\(f_{lk}\)
\(f_{ti}\)
1\(\mapsto \) 2
1 \(\mapsto \) 2
4 \(\mapsto \) 3
3 \(\mapsto \) 4
2 \(\mapsto \) 3
3 \(\mapsto \) 2
3 \(\mapsto \) 7
7\(\mapsto \) 3
7 \(\mapsto \) 7
5 \(\mapsto \) 6
5 \(\mapsto \) 6
8 \(\mapsto \) 7
7 \(\mapsto \) 8
6 \(\mapsto \) 7
7 \(\mapsto \) 6
4 \(\mapsto \) 8
8 \(\mapsto \) 4
8 \(\mapsto \) 8
2 \(\mapsto \) 1
6 \(\mapsto \) 5
For example, according to \(f_{tc}\), from the state \(1\), if we apply the action \(tc\), we get into the state \(2\). Similarly, from the state \(5\), we get into the state \(6\) after the application of the same action.
In the rest of this section let \(\mathcal{G}=(S, I, G, f)\) be an AG over \({\mathbb A}\). We define attacks as sequences of actions from an initial state to a goal state. We first recall standard notion on labeled graphs.
A path starting from \(s \in S\) in \(\mathcal{G}\) is a sequence of states \(\pi =s_0s_1\ldots s_n\) such that \(s_0=s\) and \(\exists a\in {\mathbb A}, f(s_i,a)=s_{i+1}\), for all \(0 \le i< n\). A path \(\pi \) reaches the set \(S'\subseteq S\) if \(s_n \in S'\). A path \(\pi =s_0\ldots s_n\) is elementary if, for all \(0\le i<j\le n, s_i\ne s_j\).
Let \(a_1.\ldots .a_n\in {\mathbb A}^*\) be a sequence of actions and let \(s_0 \in S\). A path induced by \(a_1.\ldots .a_n\in {\mathbb A}^*\) is a path \(\pi =s_0s_1\ldots s_n\) such that \(f_{a_{i+1}}(s_i)=s_{i+1}\), for all \(0 \le i < n\).
Definition 2
An attack in \(\mathcal{G}\) is a sequence of actions \(a_1.a_2\ldots .a_n\in {\mathbb A}^*\) such that there exists an elementary path from some initial state induced by \(a_1\ldots a_n\) and which reaches the set \(G\). Let \(Attack(\mathcal{G})\) be the set of attacks in \(\mathcal{G}\); it is finite.
In \(\mathcal{G}_{ex}\), \(tc.go_{in}, fl.go_{in}.cd.uk.ti\) is an attack either along path \(5,6,7\) or path \(1,2,3,4,8,8\). Also, \(tc.go_{in}.cd.ti \in Attack(\mathcal{G}_{ex}).\)
5 High-Level Actions and Attack Trees
We first define hierarchies of actions used to describe attacks in a more comprehensible way called strategy. Then strategies are gathered into an attack tree.
5.1 Hierarchy of Actions
The paths extracted from the AG are low-level descriptions of attacks by means of elementary actions. However, sequences of actions may be abstracted as so-called high-level actions, explaining some behaviors in a more abstract manner. This abstraction relies on a hierarchy of actions, which may be updated along an analysis process.
Consider our running example. The set \({\mathbb A}\) of elementary actions describe the lowest level actions of level \(0\), written \(\mathcal{H}_0\). “Higher level” actions can be considered for example if one wishes to introduce action \(or\) for “open room” which may be achieved, or refined, by performing either (elementary) actions \(tc\) (“type the code”), or \(fl\) (“force the lock”), or \(od\) (“open the door”). In the same line, one can define the higher-level action \(cr\) (“close room”) uniquely refined as action \(cd\) (“close the door”). Since higher-level actions \(or\) and \(cr\) can be realized by actions of level \(0\), they would belong to level \(1\), that is the set \(\mathcal{H}_1\). To \(\mathcal{H}_1\), we add action \(oc\) (“open cabinet”) refined by performing \(uk\), the action \(cc\) (“close cabinet”) refined by performing \(lk\) (“lock the cabinet with key”), and \(tw\) (“take weapons”) refined either by \(ti\), or \(cd.ti\), or \(od.ti\), or \(ti.tw\).
Based on a (somewhat arbitrary) choice of abstraction given by an expert, we get a hierarchy of actions which consists in a set \(\mathcal{H}_0= {\mathbb A}\) of elementary actions, and a set \(\mathcal{H}_1\). The latter is formed of actions whose realizations are sequences of actions of level \(0\). More generally, we should describe a high-level actions of level \(k\) by at least a sequence of level \(k-1\), i.e., a sequence containing at least an action of level \(k-1\) (no action of level greater than \(k-1\)). We now formalize the notion of hierarchy of high-level actions.
Definition 3
A hierarchy over a set of actions \(\mathbb A\) is a structure
\({\mathbb H}=\left( \{\mathcal{H}_k\}_{0\le k\le K}, \mathcal{R}\right) \) where:
-
each \(\mathcal{H}_k\) (\(0<k\le K\)) is a finite set of high-level actions (HLA), with \(\mathcal{H}_K\ne \emptyset \) which forms the top-level actions. \(K \in \mathbb N\) is the hierarchy level and \(\mathcal{H}_0={\mathbb A}\) is the set of primitive actions. We let \(\mathcal{H}=\bigcup _{0\le k\le K} \mathcal{H}_k\), whose typical elements are \(A, B, A', A_1, A_2, \ldots \).
-
\(\mathcal{R}\subseteq \mathcal{H}\times \mathcal{H}^*\) is the set of the refinement rules which satisfies \(level(\mathcal{R}(A)) \le level(A)\), for all action \(A\in \mathcal{H}\). In particular, \(\mathcal{R}(A)=A\) for all \(A \in \mathcal{H}_0\).
We define \(level: \mathcal{H}\rightarrow \{0,\ldots , K\}\), the level function, by \(level^{-1}(k) =\mathcal{H}_k\) Footnote 1. A hierarchy is strict if for all action \(A\in \mathcal{H}\), \(level(\mathcal{R}(A))<level(A)\).
As explained above, we have equipped the AG \(\mathcal{G}_{ex}\) with a \(2\)-level hierarchy \({\mathbb H}_{ex}\) over \(\mathbb A\) defined by \(\mathcal{H}_0=\{tc, fl, od, cd,go_{in},go_{out},uk,lk,ti\}\), \(\mathcal{H}_1=\{or, cr, oc,cc,tw\}\) and \(\mathcal{H}_2=\{er,gr,st\}\) and the following refinement rules, where we write \(A\leadsto A_1\ldots A_n\) instead of \((A,A_1 \ldots A_n) \in \mathcal{R}\), and even use “\(|\)” on the right-hand side of \(\leadsto \) to mimic standard notations in formal grammar rules; for instance, expression \(or \leadsto tc \,|\, fl \,|\, od\) means that \(\mathcal{R}(or)=\{tc,fl,od\}\).
with HLAs of level \(2\) \(er\) for “enter room”, \(gr\) for “get out of room” and \(st\) for “steal weapon”, and we recall HLAs of level \(1\): \(or\) for “open the room”, \(cr\) for “close room”, \(oc\) for “open cabinet”, \(cc\) “close cabinet”, and \(tw\) for “take weapons”.
5.2 Strategies
Strategies provide high-level descriptions of attacks in the AG. These objects are (forests of) labelled trees whose sequences of leaves describe attacks, while internal nodes of trees are labelled by HLA.
In the rest of this section, we let \(\mathcal{G}=(S, I, G, f)\) be an AG over a set of actions \(\mathcal{H}_0\), \({\mathbb H}=(\{\mathcal{H}_k\}_{0\le k\le K}, level, \mathcal{R})\) be a hierarchy.
Definition 4
A strategy over \({\mathbb H}\) is an \(\mathcal{H}\)-forest \(\sigma =\{\tau _i\}_{i=1\ldots n}\) such that for each \(\tau _i=(T_i,\ell _i)\), and for every \(t\in T_i\), \(\ell _i(t) \leadsto \ell _i(t_1) \ldots \ \ell _i(t_j)\) is a refinement rule, where \(t_1,\ldots , t_j\) are the children of \(t\) in \(T_i\). Given a strategy \(\sigma \), we will write \(w(\sigma )=w(\tau _1)w(\tau _2)\ldots w(\tau _n) \in \mathcal{H}_0^*\) for the attack of \(\sigma \).
A strategy \(\sigma \) is winning whenever \(w(\sigma ) \in Attack(\mathcal{G})\).
The set \(\{\tau _1,\tau _2\}\) (see Figs. 3(a) and (b)) represents a winning \({\mathbb H}_{ex}\)-strategy \(\sigma _1\) with two trees, whose attack is \(tc.go_{in}.cd.ti\). In essence, branching nodes of a strategy have a conjunctive meaningFootnote 2.

Trees \(\tau _1\) (a) and \(\tau _2\) (b) forming strategy \(\sigma _1=\{\tau _1,\tau _2\}\) such that with \(w(\sigma _1)=ti.go_{in}.cd.ti \in Attack(\mathcal{G}_{ex})\). (c) is another strategy \(\sigma _2\) for \(ti.go_{in}.cd.ti\).
It should be noted that there may be several strategies associated to an attack. For instance, strategy \(\sigma _1\) formed by Figs. 3(a) and (b), and strategy \(\sigma _2\) of Fig. 3(c) have respectively the same attack \(tc.go_{in}.cd.ti\). This phenomenon is typical of a hierarchy of actions that is “ambiguous”Footnote 3.
For \(w \in Attack(\mathcal{G})\), we let \(\varSigma (w):\,\!=\{\sigma \,|\, w(\sigma )=w\}\) be the set of strategies associated with \(w\).
Now that we know how to relate attacks in an AG with strategies that exploit the hierarchy of actions, we can gather strategies into a kind of “and-or” trees called an attack tree, in the same line as [6].
5.3 Attack Trees
Strategies \(\sigma _1\) and \(\sigma _2\) and of Fig. 3, although both abstracting attack \(tc.go_{in}.cd.ti\) in \(\mathcal{G}_{ex}\), can be distinguished: the former relies on refinement rules \(er\leadsto or.go_{in}.cr\), \(cr\leadsto cd\) and \(tw\leadsto ti\), whereas the latter relies on rules \(er\leadsto or.go_{in}\) and \(tw \leadsto cd.ti\). These alternatives can be expressed using trees including some nodes carrying an “or” semantics.
In the rest of this section, we let \({\mathbb H}=(\{\mathcal{H}_k\}_{0\le k\le K}, level, \mathcal{R})\) be a hierarchy. We consider the signature formed of and connectors defined by  , where
, where  has arity
\(j\) (see Definition 5).
has arity
\(j\) (see Definition 5).
Attack tree nodes can be labeled by HLAs or by connectors or by the special symbol \(win\) which actually characterizes the root; label \(win\) is somehow a “super” high-level action representing the main goal.
Definition 5
An Attack Tree (AT) over \({\mathbb H}\) is a \((\mathcal{H}\cup \mathcal{C}\cup \{win\})\)-labeled tree \(\mathcal T=(T,\ell )\) such that for all \(t\in T\), if \(\ell (t)\in \mathcal{C}_k\), then \(t\) has \(k\) children, and \(t \in leaves(T)\) iff \(\ell (t) \in \mathcal{H}_0\). Virtual (resp. true) nodes of \(T\) are those nodes labeled over \(\mathcal{C}\cup \{win\}\) (resp. \(\mathcal{H}\)).
Definition 6
\(\mathcal T=(T,\ell )\) over \({\mathbb H}\) is well-formed if for any branch \(n_1n_2\ldots n_m\) of \(T\), and for any \(1\le i<j \le m\), letting \(L=\ell (n_1n_2\ldots n_i)\) and \(L'=\ell (n_1n_2\ldots n_j)\), if \(L,L' \in \mathcal{H}\), then \(level(L) >level(L')\).
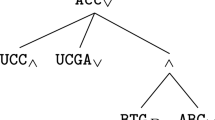
In well-formed ATs, the level of actions along a branch strictly decreases; Fig. 4 depicts a well-formed AT over \({\mathbb H}_{ex}\) Footnote 4.

Attack tree \(\mathcal T_0\)
From strategies to ATs. We can embed strategies into ATs. This embedding consists in (i) explicitly connecting nodes of the trees to the strategy forest, and in (ii) connecting the roots of all the resulting trees via a“\(win\)-then- ” mechanism.
” mechanism.
We first start explaining (i). Let \(\sigma \) be a strategy over \({\mathbb H}\), and let \(\tau =(T,\ell ) \in \sigma \). We transform \(\tau \) into the  -labeled tree \(\widehat{\tau }=(\widehat{T},\widehat{\ell })\) defined by induction over the height \(h\) of \(\tau \) as follows.
-labeled tree \(\widehat{\tau }=(\widehat{T},\widehat{\ell })\) defined by induction over the height \(h\) of \(\tau \) as follows.
-
If \(h=0\), then \(\widehat{\tau }=\tau \).
-
Otherwise, let \(\tau _1=(T_1,\ell _1), \ldots ,\tau _n= (T_n,\ell _n)\) be the ordered sub-trees at \(\tau \) root (hence with lower height). Then
-
\(\widehat{T}\) is the least set containing all the sets \(\{1\}\), \(1.1.\widehat{T_1}\),...,\(1.n.\widehat{T_n}\), and
-
\(\widehat{\ell }(\epsilon )=\ell (\epsilon )\),
 and \(\widehat{\ell }(1.i.t)=\widehat{\ell _i}(t)\).
and \(\widehat{\ell }(1.i.t)=\widehat{\ell _i}(t)\).
-
 and
and For example, consider the trees \(\tau _1\) of Fig. 3(a) and \(\tau _2\) of Fig. 3(b); the trees \(\widehat{\tau _1}\) and \(\widehat{\tau _2}\) are depicted in Fig. 5(a).

We can now embed strategies into ATs.
Definition 7
Let \(\sigma =\{(T_i,\ell _i)\}_{i=1,\ldots ,n}\) be a strategy over some hierarchy \({\mathbb H}\). The canonical AT associated to \(\sigma \) is \(\mathcal T_{\sigma }=(T,\ell )\) over \({\mathbb H}\) defined by:
-
\(T\) is the least set containing all the sets \(\{1\},1.1.\widehat{T_1}\),..., \(1.n.\widehat{T_n}\) (a node of \(T\) is then either \(\epsilon \) or \(1\) or of the form \(1.i.y\) where \(y \in \widehat{T_i}\)).
-
\(\ell (x)=\left\{ \begin{array}{lll}win&{} &{} \text {if } x=\epsilon \\ \bigcirc \!\!\!\!\!\tiny {\wedge }&{} &{} \text {if } x=1\\ \widehat{\ell _i}(y) &{} &{} \text {if } x=1.i.y \end{array}\right. \)
Clearly, \(\mathcal T_{\sigma }\) respects Definition 5, hence it is an AT. Note also that if \({\mathbb H}\) is strict, then \(\mathcal T_{\sigma }\) is well-formed. Figure 5(b) depicts \(\mathcal T_{\sigma _1}\) for strategy \(\sigma _1\) of Fig. 3.
From ATs to Strategies. A given AT \(\mathcal T\) naturally denotes a set \(\varSigma (\mathcal T)\) of strategies. Each strategy of \(\varSigma (\mathcal T)\) is obtained by keeping all nodes of \(\mathcal T\), but by selecting a single child in each \(\mathcal{H}\)-labeled node of \(\mathcal T\). Due to lack of space we do not formally define \(\varSigma (\mathcal T)\). Instead, we provide the clarifying following example.
The AT \(\mathcal T_0\) of Fig. 4 is such that \(\varSigma (\mathcal T_0)=\{\sigma _2,\sigma _3,\sigma _4,\sigma _5\}\) (where the strategies are given in Fig. 3(c), Fig. 6(a), (b) and (c) respectively), because in \(\mathcal T_0\) there are two nodes (with HLAs \(or\) and \(st\)), with two possible refinements each, hence the four outcomes for \(\varSigma (\mathcal T_0)\).
Attack Tree Synthesis. We equip ATs with a binary operation \(\oplus \) of merging with the following guaranteed properties.
-
\(\oplus \) is associative: \((\mathcal T_1 \oplus \mathcal T_2) \oplus \mathcal T_3 = \mathcal T_1 \oplus (\mathcal T_2 \oplus \mathcal T_3)\), for any ATs \(\mathcal T_1\), \(\mathcal T_2\) and \(\mathcal T_3\).
-
\(\oplus \) is well-formedness preserving.
-
For any two ATs \(\mathcal T_1\) and \(\mathcal T_2\),
$$\begin{aligned} \varSigma (\mathcal T_1 \oplus \mathcal T_2) \supseteq \varSigma (\mathcal T_1) \cup \varSigma (\mathcal T_2) \end{aligned}$$(1)

Strategies included in \(\mathcal T_0\) of Fig. 4
It should be noted that Eq. (1) is not an equality. This is illustrated by the AT \(\mathcal T_{\sigma _2}\oplus \mathcal T_{\sigma _3}\) (for strategies \(\sigma _2\) and \(\sigma _3\) of Figs. 3(c) and 6(a)), which turns out to correspond to \(\mathcal T_0\) in Fig. 4, and yet \(\varSigma (\mathcal T_0)=\{\sigma _2, \sigma _3, \sigma _4, \sigma _5\}\). Actually, the fact that Eq. (1) is an inclusion instead of an equality is harmless since we claim that the extra strategies are in general also winning – indeed, returning to the matter at hand, HLAs would essentially denote sub-goals. Thus, if the main goal decomposes into HLAs e.g., \(A\) then \(B\), and if now \(A\) can be refined into either \(A_1\) or \(A_2\) and, similarly, if \(B\) can be refined into either \(B_1\) or \(B_2\), the main goal cannot be achieved following any of the four combinations \(A_1.A_2\), \(A_1.B_2\), \(B_1.A_2\) and \(B_1,B_2\).
Operation \(\oplus \) is central as it provides the last step for synthesizing an AT: from a finite set \(\varSigma \) of strategies, the synthesis is the result of computing
How this operation can be implemented in a scalable manner is left as future work (see next section).
6 Towards Attack Tree Synthesis
We proposed a mathematical setting to develop procedures that synthesize attack trees. An original and important aspect of our work is that an expert can participate in the synthesis process through the specification of so-called high-level actions (HLAs). We also sketched an end-to-end tool-supported methodology: starting from a high-level description of a system (e.g., a military building), practitioners can generate attacks through model-checking techniques, and eventually exploit HLAs to synthesize readable and well-structured attack trees. We are implementing ATSyRA Footnote 5, a tool built on top of Eclipse and upon the mathematical foundations, to support the synthesis methodology with a set of dedicated languages. Our work opens avenues for further research and engineering effort for supporting the analysis of realistic military risks by practitioners.
Interactive Support. The process is likely to be interactive and incremental: experts obtain an attack tree, add some information, re-synthesize, and so on. At different steps of the methodology, there are opportunities to parametrize the synthesis. For instance, experts can typically fine tune the generation of attacks. Currently, the building specification is transformed into GAL [2] (for Guarded Action Language) a simple yet expressive formalism to model concurrent systems. GAL is supported by efficient decision diagrams for model-checking. We use GAL support to generate attacks. Some predicates can be added to scope the space in which model checking mechanisms operate over. We can envision the use of specific languages, independent of GAL and at a higher level of abstraction, for easing the generation of attacks considered as relevant. Besides, experts can guide the synthesis of attack trees through HLAs. Re-structuring the hierarchy or abstracting a set of attacks can arise if the resulting attack tree is not satisfactory (e.g., in case the tree is too flat and hard to understand). Some visualisations and suggestions can help an expert for this task.
Scalability. The number of attacks can be huge, especially if the building specification contains numerous elements, leading to numerous possible paths for an attacker. The scalability problem impacts two aspects of the methodology. First, the synthesis of attack trees: HLA can help to reduce the complexity, since a hierarchy is pre-defined, guiding a canonical form they should conform. Yet, implementing the merging operator \(\oplus \) of attack trees faces the very complex combinatorics induced by pattern-matching-like issues. Heuristics are likely to be needed both for computing the merge of attack trees and for scaling up. Second, we need to only generate relevant attacks. Again, experts can directly tune GAL to scope the generation: some facilities are needed to ease the task.
Attack Defense. Another step in our work consists in the introduction of the defender. We aim to study his or her actions and reactions. We plan to consider game theory and multi-agents systems, keeping close to the clean foundations proposed by [7].
Notes
- 1.
We may sometimes display \(level\) in the structure.
- 2.
And even a “sequential” one, ı.e. children of the and-node are considered in order from left to right.
- 3.
As for context-free grammars.
- 4.
In figures, we omit the arity of connectors.
- 5.
More information about ATSyRA is available online: http://tinyurl.com/ATSyRA.
References
AttackTree+. http://www.isograph.com/software/attacktree/
Colange, M., Baarir, S., Kordon, F., Thierry-Mieg, Y.: Towards distributed software model-checking using decision diagrams. In: Sharygina, N., Veith, H. (eds.) CAV 2013. LNCS, vol. 8044, pp. 830–845. Springer, Heidelberg (2013)
Hong, J.B., Kim, D.S., Takaoka, T.: Scalable attack representation model using logic reduction techniques. In: 12th IEEE International Conference on Trust, Security and Privacy in Computing and Communications, pp. 404–411 (2013)
ISO, Geneva, Switzerland. Norm ISO/IEC 27002 - Information Technology - Security Techniques - Code of Practice for Information Security Management, ISO/IEC 27002:2005 edition, Section 9 (2005)
Jha, S., Sheyner, O., Wing, J.: Two formal analyses of attack graphs. In: Proceedings of the 15th Computer Security Foundation Workshop, pp. 49–63 (2002)
Kordy, B., Mauw, S., Radomirović, S., Schweitzer, P.: Foundations of attack–defense trees. In: Degano, P., Etalle, S., Guttman, J. (eds.) FAST 2010. LNCS, vol. 6561, pp. 80–95. Springer, Heidelberg (2011)
Kordy, B., Mauw, S., Radomirović, S., Schweitzer, P.: Attack-defense trees. J. Logic Comput. 24(1), 55–87 (2014)
Kordy, B., Piètre-Cambacédès, L., Schweitzer, P.: Dag-based attack and defense modeling: Don’t miss the forest for the attack trees (2013). arXiv preprint arXiv:1303.7397
Mauw, S., Oostdijk, M.: Foundations of attack trees. In: Won, D.H., Kim, S. (eds.) ICISC 2005. LNCS, vol. 3935, pp. 186–198. Springer, Heidelberg (2006)
Mehta, V., Bartzis, C., Zhu, H., Clarke, E.: Ranking attack graphs. In: Zamboni, D., Kruegel, C. (eds.) RAID 2006. LNCS, vol. 4219, pp. 127–144. Springer, Heidelberg (2006)
N. Research and T. O. (RTO). Improving Common Security Risk Analysis. Technical report AC/323(ISP-049)TP/193, North Atlantic Treaty Organisation, University of California, Berkeley (2008)
Schneier, B.: Attack trees: modeling security threats. Dr. Dobb’s J. 24, 21–29 (1999)
Schultz, E.E.: Risks due to the convergence of physical security and information technology environments. Inf. Secur. Tech. Rep. 12, 80–84 (2007)
Seamonster. http://sourceforge.net/apps/mediawiki/seamonster/
SecurITree. http://www.amenaza.com/
Sheyner, O., Haines, J., Jha, S., Lippman, R., Wing, J.: Automated generation and analysis of attack graphs. In: Proceedings of the 2002 IEEE Symposium on Security and Privacy, p. 273. IEEE Computer Society (2002)
Sheyner, O.: Tools for generating and analyzing attack graphs. In: de Boer, F.S., Bonsangue, M.M., Graf, S., de Roever, W.-P. (eds.) FMCO 2003. LNCS, vol. 3188, pp. 344–371. Springer, Heidelberg (2004)
Sheyner, O.M.: Scenario Graphs and Attack Graphs. Ph.D. thesis (2004)
Acknowledgements
This work is funded by the Direction Générale de l’Armement (DGA) - Ministère de la Défense, France. We thank Salomé Coavoux and Maël Guilleme for their insightful comments and development around ATSyRA.
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2015 Springer International Publishing Switzerland
About this paper
Cite this paper
Pinchinat, S., Acher, M., Vojtisek, D. (2015). Towards Synthesis of Attack Trees for Supporting Computer-Aided Risk Analysis. In: Canal, C., Idani, A. (eds) Software Engineering and Formal Methods. SEFM 2014. Lecture Notes in Computer Science(), vol 8938. Springer, Cham. https://doi.org/10.1007/978-3-319-15201-1_24
Download citation
DOI: https://doi.org/10.1007/978-3-319-15201-1_24
Published:
Publisher Name: Springer, Cham
Print ISBN: 978-3-319-15200-4
Online ISBN: 978-3-319-15201-1
eBook Packages: Computer ScienceComputer Science (R0)