
Abstract
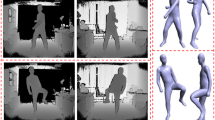
In this paper, we present a novel approach of recovering a 3-D human pose from a single human body depth silhouette using nonrigid point set registration. In our methodology, a human body depth silhouette is presented as a 3-D points set that is matched to the next 3-D points set through point correspondences between them. To recognize and maintain the body part labels, we first initialize the initial points set and their corresponding body parts, then transform them to the next points set according the point correspondences via nonrigid point set registration. Upon the point registration, we use the information of the transformed body labels of the registered pose to create a human skeleton model. Finally, a 3-D human pose is recovered by mapping the skeleton’s position and orientation information to a 3-D synthetic human model. Our quantitative and qualitative evaluation on synthetic and real data show that complex poses could be tracked and recovered reliably.
Access provided by Autonomous University of Puebla. Download to read the full chapter text
Chapter PDF
Similar content being viewed by others


Author information
Authors and Affiliations
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2015 Springer International Publishing Switzerland
About this paper
Cite this paper
Dinh, DL., Thang, N.D., Lee, S., Kim, TS. (2015). Nonrigid Point Set Registration-Based 3-D Human Pose Tracking from Depth Data. In: Toi, V., Lien Phuong, T. (eds) 5th International Conference on Biomedical Engineering in Vietnam. IFMBE Proceedings, vol 46. Springer, Cham. https://doi.org/10.1007/978-3-319-11776-8_100
Download citation
DOI: https://doi.org/10.1007/978-3-319-11776-8_100
Publisher Name: Springer, Cham
Print ISBN: 978-3-319-11775-1
Online ISBN: 978-3-319-11776-8
eBook Packages: EngineeringEngineering (R0)