
Abstract
The acceleration approach is an efficient and accurate tool for the estimation of the low-frequency part of GOCE (Gravity field and steady-state Ocean Circulation Explorer) gravity fields from GPS-based satellite-to-satellite tracking (SST). This approach is characterized by second-order numerical differentiation of the kinematic orbit. However, the application to GOCE-SST data, given with a 1s-sampling, showed that serious problems arise due to strong amplification of high frequency noise. In order to mitigate this problem, we developed a tailored processing strategy in a recent paper which makes use of an extended differentiation scheme acting as low-pass filter, and empirical covariance functions to account for the different precision of the components and the inter-epoch correlations caused by orbit computation and numerical differentiation. However, also a more “brute-force” strategy can be applied using the standard unextended differentiation scheme and data-weighting by error propagation of the provided orbit variance-covariance matrices (VCMs). It is shown that the direct differentiator shows a better approximation and the exploited method benefits from the stochastic information contained in the VCMs compared to the former strategy. A strong dependence on the maximum resolution, the arc-length and the method for data-weighting is observed, which requires careful selection of these parameters. By comparison with alternative GOCE hl-SST solutions we conclude that the acceleration approach is a competitive method for gravity field recovery from kinematic orbit information.
Access provided by Autonomous University of Puebla. Download conference paper PDF
Similar content being viewed by others


Keywords
1 Introduction
The Gravity field and steady-state Ocean Circulation Explorer (GOCE) satellite collects science data for the recovery of the static terrestrial gravity field since autumn 2009. Its core instrument is a three-dimensional gravity gradiometer which provides high quality measurements within a bandwidth of 5 mHz to 0.1 Hz (ESA 1999), roughly corresponding to spherical harmonic degrees 30–250. As a consequence, gradiometry has to be complemented with data containing long-wavelength signals in the framework of GOCE-only gravity field recovery. This additional data is provided by kinematic orbit information in terms of high-low satellite-to-satellite tracking (hl-SST) with GPS.
Besides the classical method for dynamic orbit analysis based on variational equations (Reigber 1989), efficient alternative methods have been developed that exploit kinematic orbit information. The most prominent of these alternative methods are the energy-balance approach (EBA, e.g. Han et al. 2002), short-arc analysis expressed as a boundary value problem (BVP, Mayer-Gürr et al. 2005) and acceleration approaches (ACA) exploiting either point-wise accelerations (Reubelt et al. 2003, 2006) or averaged accelerations (Ditmar and van Eck van der Sluijs 2004). It can be shown that all approaches perform similar except the EBA which is worse by a factor of 1.5–2 (e.g. Löcher 2010; Reubelt 2009; Reubelt et al. 2012). Also the variational equations concept can be applied to kinematic orbits, known as the celestial mechanics approach (CMA), as used by Jäggi et al. (2011).
In a recent publication (Baur et al. 2012) concerning GOCE-SST analysis we showed that the point-wise acceleration approach (i) performs comparable to the CMA, (ii) is superior to the EBA solution used for the GOCE-TIM (Pail et al. 2011) estimates, and (iii) is able to improve the GOCE-TIM solutions up to spherical harmonic degree and order 20–30.
In Baur et al. (2012) we applied an extended differentiation filter (EDF(30s)) to the 1s-sampled kinematic GOCE orbit. The EDF(30s) acts as a low-pass filter; it damps noise and gravity signal on high frequencies but keeps gravity signal for spherical harmonic degrees l ≤ 90 untouched. As far as stochastic modeling is concerned, in Baur et al. (2012) we used robust estimation in combination with data-weighting by means of empirical covariance functions estimated from residuals in the local frame. The quality of the solutions turned out to be largely independent of the arc-length (720 s, 1,440 s, 2,880 s) and maximum resolution L max (90, 110, 120).
Apart from this tailored strategy, the application of the point-wise acceleration approach is also possible in a more direct way. Such a “brute-force” method is characterized by (i) the direct application of the differentiation operator to the 1s-sampled kinematic orbit (consistent with EDF(1s)) and (ii) the exploitation of the provided orbit VCMs in data-weighting by means of error-propagation to acceleration VCMs. The benefit of such a procedure might be
-
(i)
a better approximation of the accelerations by the EDF(1s)
-
(ii)
the use of stochastic information provided by the orbit VCMs. This is motivated by the higher accuracy of both the orbits and their VCMs (Bock et al. 2011) compared to former CHAMP orbits.
Applying this strategy, a careful error propagation for data weighting is necessary in order to treat the high-frequency noise generated by the direct differentiation of the 1s-sampled orbits correctly. As reported in Baur et al. (2012), unsatisfying results have been obtained by this procedure. The aim of this paper is to investigate this “brute-force” strategy in more detail.
2 Method
The acceleration approach makes use of the direct application of the equation of motion in the space-fixed reference system. To achieve this, the satellite’s acceleration vector has to be determined from the kinematic orbit by means of numerical double differentiation. In general this is established by means of a 9-point differentiation scheme based on Gregory-Newton-interpolation (Reubelt et al. 2003). The gravitational vector is obtained after corrections for disturbing accelerations as caused by tidal effects and time-variable gravity signals (e.g. atmosphere and ocean signals), compare Baur et al. (2012). The spherical harmonic coefficients representing the Earth’s gravity field are estimated by means of least-squares adjustment. As mentioned earlier, data weighting is important to account for the noise amplification caused by the direct application of the 9-point scheme to the 1s-sampled orbit (EDF(1s)) since there is no (or only slight) low-pass-filtering inherent compared to the EDF(30s). One possibility is data weighting with empirical covariance functions derived from residuals in the local frame together with robust estimation, i.e., a similar procedure as applied for EDF(30s) by Baur et al. (2012). Another possibility is brute-force error propagation of the provided orbit VCMs. Three versions of the latter have been tested: (i) epoch-wise full 3 × 3 VCMs, (ii) epoch-wise orbit variances with neglect of correlations (i.e., only diagonals of the VCMs), and (iii) four epoch-wise full VCMs, providing the epoch-wise 3 × 3 VCMs including full correlations with four points before and after the actual orbit point.
It is expected that the EDF(1s) provides a better approximation of accelerations than the EDF(30s) since a denser sampling is used for the differentiation. In Fig. 1 a simulated noise-free 1s-sampled GOCE-orbit over a period of 1 month is analyzed by means of both EDFs. As it can be seen, the gravity field approximation error using EDF(1s) is much smaller. However, also the approximation error when applying EDF(30s) is sufficiently small since its error curve is still below the errors of gravity retrievals from real GOCE orbits (compare with the black curve in Fig. 2). Concerning further improvements in kinematic orbit determination, however, the EDF(1s) or an EDF(Δt) with a shorter Δt than 30s is suggested in order to guarantee the approximation to be sufficiently small.

Model errors: degree RMS obtained by application of EDF(1s) and EDF(30s) to a simulated noise-free GOCE-orbit; the dashed lines are obtained from exclusion of orders m ≤ 5 in order to account for the polar gap

GOCE-SST results from EDF(1s) using different weighting strategies; maximum resolution Lmax = 90, arc-length = 1,440; for comparison the solution from EDF(30s) with application of empirical covariance-functions (Baur et al. 2012) is provided
3 Results
Kinematic orbit analysis was performed by the procedures described in the previous section. The results were compared to ITG-GRACE2010s (Mayer-Gürr et al. 2010), which is of superior quality due to the exploitation of GRACE K-band observations. The GOCE-hl-SST results in this contribution were obtained from a 61-days kinematic orbit (Bock et al. 2011) as provided via the GOCE SST_PSO_2 product (EGG-C 2010), covering the period November 1, 2009 to December 31, 2009. For comparison, the solution obtained from the EDF(30s) (Baur et al. 2012) is displayed (black curve). Dashed graphs show formal errors. If not mentioned explicitly, degree-RMS values are computed for orders m > 5 to account for the polar gap effect.

Results from EDF(1s) for different maximum resolutions Lmax and fixed arc-length = 1,440; data-weighting is performed by means of propagated epoch-wise VCMs
According to Fig. 2, the unweighted solution for EDF(1s) is almost two orders of magnitude worse compared to the EDF(30s) solution. This shows that in contrast to EDF(30s) (cf. Baur et al. 2012) the consideration of the inter-epoch correlations generated by numerical differentiation is important in order to filter the high-frequency noise. Applying empirical covariance functions leads to an improvement of about one order of magnitude, but the remaining errors show that empirical covariance functions are not able to represent the noise amplification of the double-differentiator for the EDF(1s) case sufficiently. The best results were obtained by application of error propagation of the provided orbit VCMs, where all three implementations (see previous section) perform similar. However, still a factor of 3 is missing compared to the EDF(30s) result. The strong increase of the errors for degrees l > 80 (spectral aliasing) hints to strong signal to be present in degrees l > 90. Thus, we also tested higher maximum resolutions L max (see Fig. 3) for constant arc-lengths of 1,440s and found out that a higher L max is able to improve the results over the whole spectrum. A large gain is obtained for L max = 110 and a further smaller gain for L max = 120, while L max = 130 did not show any further improvements (not displayed).
Another parameter which was found to be important is the arc-length (arc-length means here that a complete propagated acceleration VCM was used for each arc with neglect of correlations between the arcs). Results for different arc-lengths (and constant L max = 90) are displayed in Fig. 4. The best results are obtained for arc-lengths around one tenth of the orbital period. An arc-length of 480 s seems optimal from Fig. 4, while very short arc-lengths (e.g. 360s) are a drawback for lower degrees. Finally, gravity field estimation from EDF(1s) applying maximum resolution L max = 120 and arc-lengths of 480 s was performed using the three versions of orbit VCMs (see previous section) in Fig. 5. Again, a similar performance for all three versions is achieved, where the solution applying the epoch-wise 3 × 3 orbit VCMs shows a slightly lower error curve (red curve). The comparison with the EDF(30s) shows now a similar performance with slight improvements for certain degrees (10 < l < 30, 50 < l < 70 and l ≅ 35).

Results from EDF(1s) for different arc-lengths and fixed maximum resolution L max = 90; data-weighting is performed by means of propagated epoch-wise VCMs

Results from EDF(1s) using the arc-length = 480 (corresponding to 8 min) and maximum resolution L max = 120; different versions of VCMs are applied for data-weighting; dashed lines represent formal errors
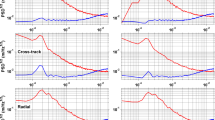
An interesting aspect is the formal errors. While the formal errors of EDF(30s) are in good agreement with the quality of the solution the formal errors for the EDF(1s) are over-optimistic. A similar behavior when applying orbit VCMs for data-weighting is obtained from the CMA (Jäggi et al. 2011), displayed in Fig. 7. We attribute this to the fact that the orbit VCMs contain certain deficiencies. For explanation, we simulated a GOCE orbit with correlated orbit noise (standard deviation σx = 1 cm, inter-epoch correlations ρ i,j = 0.9|i-j|) and applied different orbit error correlations (ρ i,j = 0.9|i-j|, ρ i,j = 0.0) for error propagation and data-weighting. As can be seen from Fig. 6, under-estimated orbit error correlations lead to over-optimistic formal errors while the effect on the true errors is negligible. Thus our assumption is that the inter-epoch correlations provided in the VCMs (4-epoch correlation), which amount up to 15 %, are too small.

Influence of under-estimating orbit error correlations in data-weighting; a 1s-sampled simulated 1-month GOCE orbit with correlated orbit noise (σx = 1 cm, ρ i,j = 0.9|i-j|) was analyzed; data-weighting was applied assuming orbit error correlations ρ = 0.9|i-j| and ρ = 0.0 respectively

Comparison of the GIWF models (L max = 120) obtained from EDF(1s) and EDF(30s) with the solutions of INAS (L max = 100) and AIUB (L max = 120); left: orders m < 5 omitted; right: orders m l ≤ |0.5π-i|l omitted (consideration of polar gaps according to van Gelderen and Koop (1997))
Finally we compared our results (GIWF, Geodetic Institute/Space Research Institute) with two other solutions obtained from the same data time span: (i) a solution estimated with the EBA by INAS (Institute of Navigation and Satellite Geodesy, Graz University of Technology) applied in current official GOCE-TIM solutions (Pail et al. 2011) and (ii) a recovery from the CMA by AIUB (Astronomical Institute of the University of Bern) (Jäggi et al. 2011). According to Fig. 7, an improvement with respect to the INAS solution by a factor of about 1.5–2 is achieved and a similar performance as the AIUB solution is obtained. Compared to the AIUB solution, the GIWF estimate shows slightly lower errors for degrees l < 20; AIUB shows slightly better results for some of the higher degrees.
Conclusions and Outlook
Supplementary to the results by Baur et al. (2012), we successfully applied the (point-wise) acceleration approach to the 1s-sampled kinematic GOCE orbit without extended differentiation (i.e. without implicit low-pass filtering) and by data-weighting based on “brute-force” error-propagation of the provided orbit VCMs. An advantage of this implementation is the better approximation of the EDF(1s) differentiation filter, especially in case of a significant gain in kinematic orbit determination in future. Furthermore the investigations show that valuable stochastic information is contained in the provided orbit VCMs, especially concerning the relative accuracy of the three orbit components and their correlation. We assume that the slight improvements of the new implementation are rather related to the orbit VCMs than to the better approximation of the direct differentiator (EDF(1s)), since the approximation of the extended differentiation filter EDF(30s) seems sufficient for GOCE. Our results indicate that the inter-epoch correlations of the orbit errors are probably under-estimated in the VCMs, leading to over-optimistic formal error estimates, while the impact on the overall quality of the solution is minor.
In contrast to Baur et al. (2012) a high sensitivity of the quality of the solutions dependent on the arc-length, the maximum resolution and data-weighting can be observed. The maximum resolution has to be selected high enough (here: L max = 120) in order to reduce spatial aliasing, an effect implicitly considered by low-pass filtering in Baur et al. (2012). The consideration of the inter-epoch correlations introduced by numerical differentiation is very important and only possible by means of error-propagation while empirical covariance functions fail for the direct differentiation of the 1s-samped orbit. The distinct dependence on the arc-length is not clarified but we assign it to the “mountain shape” of the weight-matrix, which values are growing with the arc-length (such an effect is not observed with empirical covariance functions). The identified arc-length is about one tenth of the revolution period and thus quite short. In general this might be critical due to the sensitivity of the low-degree harmonics to short arc-lengths.
We suggest to apply the orbit covariance matrices for data-weighting if they are of high quality and to use the method described in Baur et al. (2012) in case of missing or unreliable orbit covariance matrices and the presence of severe orbit outliers.
Improvements of hl-SST analysis methods are important not only for GOCE-only gravity modeling but also in view of the upcoming Swarm (Friis-Christensen et al. 2006) mission, being important as a filler of a possible gap between GRACE and a GRACE-Follow-On mission.
References
Baur O, Reubelt T, Weigelt M, Roth M, Sneeuw N (2012) GOCE orbit analysis: long wavelength gravity field determination using the acceleration approach. Adv Space Res 50(3):385–396. doi:10.1016/j.asr.2012.04.022
Bock H, Jäggi A, Meyer U et al (2011) GPS-derived orbits for the GOCE satellite. J Geod 85(11):807–818. doi:10.1007/s00190-011-0484-9
Ditmar P, Van Eck van der Sluijs A (2004) A technique for modeling the Earth’s gravity field on the basis of satellite accelerations. J Geod 78(1):12–33. doi:10.1007/s00190-003-0362-1
EGG-C (2010) GOCE level 2 product data handbook. GO-MA-HPF-GS-0110 (4.3)
ESA (1999) The four candidate earth explorer core missions – gravity field and steady-state ocean circulation mission. ESA SP-1233, 1999
Friis-Christensen E, Lühr H, Hulot G (2006) Swarm: a constellation to study the earth’s magnetic field. Earth Planets Space 58(4):351–358
Han SC, Jekeli C, Shum CK (2002) Efficient gravity field recovery using in situ disturbing potential observables from CHAMP. Geophys Res Lett 29:1789. doi:10.1029/2002GL015180
Jäggi A, Bock H, Prange L et al (2011) GPS-only gravity field recovery with GOCE, CHAMP, and GRACE. Adv Space Res 47(6):1020–1028. doi:10.1016/j.asr.2010.11.008
Löcher A (2010) Möglichkeiten der Nutzung kinematischer Satellitenbahnen zur Bestimmung des Gravitationsfeldes der Erde. Ph.D. Thesis, Rheinische Friedrich-Wilhelms-Universität zu Bonn (in German)
Mayer-Gürr T, Ilk KH, Eicker A, Feuchtinger M (2005) ITG-CHAMP01: a CHAMP gravity field model from short kinematic arcs over a one-year observation period. J Geod 78(7–8):462–480
Mayer-Gürr T, Kurtenbach E, Eicker A (2010) The satellite-only gravity field model ITG-Grace2010s. http://www.igg.uni-bonn.de/apmg/index.php?id=itg-grace2010
Pail R, Bruinsma S, Migliaccio F et al (2011) First GOCE gravity field models derived by three different approaches. J Geod 85(11):819–843. doi:10.1007/s00190-011-0467-x
Reigber C (1989) Gravity field recovery from satellite tracking data. In: Sansò F, Rummel R (eds) Theory of satellite geodesy and gravity field determination, lecture notes in earth sciences, vol 25. Springer, Berlin, pp 197–234
Reubelt T (2009) Harmonische Gravitationsfeldanalyse aus GPS-vermessenen kinematischen Bahnen niedrig fliegender Satelliten vom Typ CHAMP, GRACE und GOCE mit einem hoch aufösenden Beschleunigungsansatz, Deutsche Geodätische Kommission, C 632. Verlag der Bayerischen Akademie der Wissenschaften, Munich (in German)
Reubelt T, Austen G, Grafarend EW (2003) Harmonic analysis of the Earth’s gravitational field by means of semi-continuous ephemerides of a low Earth orbiting GPS-tracked satellite. Case study: CHAMP. J Geod 77(5–6):257–278. doi:10.1007/s00190-003-0322-9
Reubelt T, Götzelmann M, Grafarend EW (2006) Harmonic analysis of the earth’s gravitational field from kinematic CHAMP orbits based on numerically derived satellite accelerations. In: Flury J, Rummel R, Reigber C, Rothacher M, Boedecker G, Schreiber U (eds) Observation of the earth system from space. Springer, Berlin, pp 27–42
Reubelt T, Sneeuw N, Grafarend EW (2012) Comparison of kinematic orbit analysis methods for gravity field recovery. In: Sneeuw N, Novák P, Crespi M et al (eds) VII Hotine-Marussi symposium on mathematical geodesy, IAG Symp 137:259–265. Springer, Berlin
Van Gelderen M, Koop R (1997) The use of degree variances in satellite gradiometry. J Geod 71(6):337–343. doi:10.1007/s001900050101
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2014 Springer International Publishing Switzerland
About this paper
Cite this paper
Reubelt, T., Baur, O., Weigelt, M., Roth, M., Sneeuw, N. (2014). GOCE Long-Wavelength Gravity Field Recovery from 1s-Sampled Kinematic Orbits Using the Acceleration Approach. In: Marti, U. (eds) Gravity, Geoid and Height Systems. International Association of Geodesy Symposia, vol 141. Springer, Cham. https://doi.org/10.1007/978-3-319-10837-7_3
Download citation
DOI: https://doi.org/10.1007/978-3-319-10837-7_3
Publisher Name: Springer, Cham
Print ISBN: 978-3-319-10836-0
Online ISBN: 978-3-319-10837-7
eBook Packages: Earth and Environmental ScienceEarth and Environmental Science (R0)