
Abstract
A macroscopic view of sprint mechanics during an acceleration phase, and notably athlete’s propulsion capacities, can be given by Force-velocity (F-v) and Power-velocity (P-v) relationships. They characterize the change in athlete’s maximal horizontal force and power production capabilities when running speed increases and directly determine sprint acceleration performance. This chapter presents an accurate and reliable simple method to determine these mechanical capabilities during sprinting. This method, based on a macroscopic biomechanical model and validated in laboratory conditions in comparison to force plate measurements, is very convenient for field use since it only requires anthropometric (body mass and stature) and spatio-temporal (split times or instantaneous velocity) input variables. It provides different information on athlete’s horizontal force production capabilities: maximal power output, maximal horizontal force, maximal velocity until which horizontal force can be produced and mechanical effectiveness of force application onto the ground. This information presents interesting practical applications for sport practitioners to individualize training focusing on sprint acceleration performance, but also perspectives in injury management. This chapter presents different examples of such applications. Moreover, this simple method can also help to bring new insight into the limits of human locomotion since it makes possible to estimate sprinting mechanical properties of the fastest men and women without testing them in a laboratory.
Access provided by CONRICYT-eBooks. Download chapter PDF
Similar content being viewed by others

Keywords
These keywords were added by machine and not by the authors. This process is experimental and the keywords may be updated as the learning algorithm improves.
1 Introduction
The previous chapter presented recent innovative concepts and measurement methodologies to explore, evaluate and better understand mechanics of sprinting. A macroscopic view of the sprint mechanics during an acceleration phase, and notably the athlete’s propulsion capacities, can be given by Force-velocity (F-v) and Power-velocity (P-v) relationships. These relationships characterize the change in athlete’s maximal horizontal force and power production capabilities when running speed increases. These capabilities directly determine athlete’s forward acceleration, which is a key factor of performance in many sport activities, not only to reach the highest top velocity, but also and most importantly to cover a given distance in the shortest time possible, be it in track and field events or in team sports (see previous chapter).
As previously described for other movements (pedaling, squat jumps, bench press), these relationships allow the determination of key mechanical variables being complex integration of the different physiological, neural and biomechanical mechanisms involved in the total external force production and characterizing different athlete’s muscle abilities. However, in contrast to acyclic ballistic push-offs (e.g. squat jumps, Chaps. 4 and 5), F-v and P-v relationships in sprint running are specific to running acceleration propulsion and in turn also integrate the ability to apply the external force effectively (i.e. horizontally in the antero-posterior direction) onto the ground (Morin et al. 2011a, b, 2012; Rabita et al. 2015). The technical ability of force application during sprint running and its implication in sprinting performance has been well presented and detailed in the previous chapter (see Chap. 10, Sect. 10.3.3). F-v and P-v relationships provide thus an objective quantification of the maximal power output an athlete can develop in the horizontal direction (P max , power capabilities), the theoretical maximal horizontal force an athlete could produce onto the ground (F 0, force capabilities) and the theoretical maximal velocity at which he/she could run if there is no external constraints to overcome (v 0, velocity capabilities). The latter can be also interpreted as the maximal running velocity until which the athlete is still able to produce positive net horizontal force, which well represents his/her ability to produce horizontal force at high running velocities. As for the other movements, force and velocity capabilities in sprint are independent and do not refer to the same physical and technical abilities. The ratio between both corresponds to athlete’s F-v profile (S Fv ). These different mechanical variables integrate athlete’s “physical” qualities (lower limb muscle force production capacities) and “technical” abilities (mechanical effectiveness of force application). The latter can be computed at each step by the ratio of horizontal to total force (RF). Mechanical effectiveness can so be well described by the maximal value of RF observed at the first step (RFmax) and its rate of decrease when velocity increases (D RF ). Quantifying individually the mechanical effectiveness can help to distinguish the physical and technical origins of inter or intra-individual differences in both Force-velocity-Power (FvP) mechanical profiles and sprint performances, which can be useful to more appropriately orient the training process towards the specific mechanical qualities to develop.
As presented in the previous chapter, different methodologies have been proposed to assess all these mechanical variables characterizing sprint propulsion capabilities. Briefly, the first ones in the nineties used motorized or non-motorized specific treadmills of whom the belt was accelerated by the athlete and required several 6-s sprints against different loads to determine FvP relationships from peak velocity (Jaskolska et al. 1999; Jaskolski et al. 1996; Chelly and Denis 2001). Then, in 2010, a single sprint method was validated in our lab using a dynamometric treadmill and foot-ground contact phase averaged values to compute the different relationships and mechanical variables (Morin et al. 2010, 2011a). Few years later, to respond to the criticisms on treadmill measurements for sprinting evaluations (non-natural movement due to waist attachment, a belt narrower than a typical track lane, the impossibility to use starting block, the need to set a default torque), we collaborated with colleagues of the French National Institute of Sport to propose and validate a method to measure ground reaction force over an entire sprint acceleration phase from 5 sprints overground and a 6.6-m force plate system, since to date no 30- to 60-m long force plate systems exist (Rabita et al. 2015). This allowed, for the first time, to provide the data to entirely characterize the mechanics of overground sprint acceleration. These different laboratory methodologies, each of them presenting advantage and inconvenient, present very accurate and reliable measurements of the different mechanical propulsion qualities (force, velocity and power capabilities). However, sport practitioners do not have easy access to such expensive and rare devices, and often do not have the technical expertise to process the raw force data measured. In the best cases, this forces athletes to report to a laboratory. This explains that, although very accurate and potentially useful for training purposes, this kind of evaluation has almost been never performed.
Consequently, sport scientists investigating sprint mechanics and performance usually assess, at best, only very few steps of a sprint (e.g. Kawamori et al. 2014; Lockie et al. 2013). Sport practitioners do not explore kinetic variables, i.e. athlete’s force and power production, but only their consequences on movement, i.e. kinematic parameters (e.g. split times or distances covered in a given time). The exploration of sprint performance in field conditions through kinematic analyses of the horizontal displacement of the body center of mass has already been proposed in 1920s by Furusawa, Hill and colleagues. They used a magnet carried by the athlete which induced an electrical current each time the athlete runs in front of coils of wire connected to a galvanometer placed at given distances in parallel to the track (Fig. 11.1, Furusawa et al. 1927). Another ingenious device was used later in 1954 by Henry who equipped a track (on the roof of a building) with several timing contact gates allowing to measure times with an accuracy of 0.01 s (Fig. 11.1, Henry 1954). These were the ancestors of current photocells or high speed cameras giving the different split times during a sprint acceleration phase. In parallel to time measurements, instantaneous speed assessments can be done out of labs using radar or laser guns which measure athlete positions at very high sample rates (from 30 to 100 Hz). Even if kinematic variables provide very interesting information on sprint performance, they do not give insights about the athlete’s force and power production capabilities nor about the distinction between “physical” and “technical” abilities. Typical examples will be presented at the end of this chapter to show the interest of kinetic assessments in addition to kinematic ones.

Main devices used in the past and at the moment to analyse sprint kinematics out of labs
A simple method for determining F-v and P-v relationships and force application effectiveness during sprint running in overground realistic conditions, out of the lab, and from only one single sprint, seems to be therefore very interesting to generalize sprint mechanics evaluations for training or scientific purposes. This chapter will present a simple field method we proposed to compute accurately force, velocity and power lower limb capabilities from few data inputs that are easy to obtain in typical training practice. The validation protocol and results, limitations and practical applications will then be presented and discussed.
2 Theoretical Bases and Equations
As for the other simple methods presented in this book, the simple sprint method for measuring force, velocity and power capabilities during sprint running is based on the fundamental principles of dynamics applied to the body center of mass (CM) (for more details, see Samozino et al. 2016). The biomechanical model used here is an analysis of kinematics and kinetics of the runner’s CM during sprint acceleration using a macroscopic inverse dynamics approach aiming to be the simplest possible (Helene and Yamashita 2010; Furusawa et al. 1927; di Prampero et al. 2015). In this approach, as for the previous ones, mechanical variables are modeled over time, without considering intra-step changes, and thus corresponds to step-averaged values (contact plus aerial times).
During a running maximal acceleration, let us consider the different external forces applied to the athlete’s CM: the body weight, the aerodynamic resistive forces and the ground reaction force (GRF) with its horizontal and vertical components (Fig. 11.2). Applying the fundamental laws of dynamics in the horizontal direction, the net horizontal antero-posterior GRF (F H ) applied to the body CM can be modeled over time as:

Schematic representation of the external forces applied to a sprinter during his acceleration phase: body weight (mg), aerodynamic resistive force (F aero ) and vertical (F V ) and horizontal (F H ) components of the ground reaction force
with m the runner’s body mass (in kg), \(a_{H} \left( t \right)\) the CM horizontal acceleration and F aero (t) the aerodynamic drag to overcome during sprint running. Basic computational fluid dynamics principles show that F aero (t) is proportional to the square of the velocity of air relative to the runner and can be modelled as:
with \(v_{w}\) the wind velocity (if any) and k the runner’s aerodynamic friction coefficient. The latter can be estimated from values of air density (ρ, in kg m−3), frontal area of the runner (Af; in m2), and drag coefficient (Cd = 0.9, van Ingen Schenau et al. 1991) as proposed by Arsac and Locatelli (2002):
with
where \(\rho_{0} = 1.293\) kg m−1 is the ρ at 760 Torr and 273K, Pb is the barometric pressure (in Torr), T° is the air temperature (in °C) and h is the runner’s stature (in m).
To sum up, beyond to know the athlete’s stature and body mass, as well as approximations of ambient temperature and barometric pressure (which have only negligible incidences on mechanical output, see Sect. 11.3), \(a_{H} \left( t \right)\) is the only required kinematic input variable to model F H .
During a running maximal acceleration, horizontal velocity (v H ) systematically increases following a mono-exponential function. This can be observed for recreational athletes, team sport players, the best sprinter of all time, a young 4-year old boy or a 95-year old man and have been shown many times in scientific literature (Fig. 11.3, (e.g. Furusawa et al. 1927; di Prampero et al. 2005; Morin et al. 2006; Chelly and Denis 2001):
with \(v_{{H_{\hbox{max} } }}\) the maximal velocity reached at the end of the acceleration and τ the acceleration time constant. After integration and derivation of \(v_{H} \left( t \right)\) over time, the horizontal position \(\left( {x_{H} } \right)\) and acceleration \(\left( {a_{H} } \right)\) of the body CM as a function of time during the acceleration phase can be expressed as follows:

Velocity-time curves obtained during sprinting acceleration of a 2-year old young boy, a world class athlete and a 95-year old man. The noisy lines correspond to the radar gun data and the solid smoothed lines represent the mono-exponential model function. The differences in magnitudes of noise in the radar signals are independent from the age or level of the individual, but is associated to different filters applied on these typical raw data
Consequently, \(v_{{H_{\hbox{max} } }}\) and \(\uptau\) values can be determined from velocity or position/time measurements and using least square regression method and Eq. 11.6 or 11.7. Then, \(a_{H} \left( t \right)\) can be computed at each instant (for instance, every 0.1 or 0.05 s) using Eq. 11.8, F H can be obtained using Eq. 11.1 and \(v_{H}\) using Eq. 11.6 [if the initial measurement is \(x\left( t \right)\)]. The mean net horizontal antero-posterior power output applied to the body CM (P H in W) can then be modelled at each instant as the product of F H and \(v_{H}\). Plotting F H versus \(v_{H}\) and modeling this relationship by a linear equation gives the F-v relationship which can be extrapolated to obtain the maximal force (F 0) and velocity (v 0) values as the intercept with the force- and velocity-axis, respectively (Fig. 11.4). The P-v relationship can be obtained using a 2nd order polynomial regression on P H -\(v_{H}\) plot, the apex of the latter corresponding to the maximal power output \((P_{{H_{\hbox{max} } }} )\).

Modelled changes in horizontal velocity (v H ), horizontal antero-posterior force (F H ) and power (P H ) over time during the acceleration phase of a sprint, and associated modelled force- and power-velocity relationships with maximal force (F 0), velocity (v 0) and power (\(P_{{H_{\hbox{max} } }}\))
Then, applying the fundamental laws of dynamics in the vertical direction, the mean net vertical component of GRF (F V ) applied to the body CM over each complete step can be modeled over time as equal to body weight (di Prampero et al. 2015):
where g is the gravitational acceleration (9.81 m s−2).
The ratio of force (RF in %) can be modeled at each instant by:
After plotting \(RF\) versus \(v_{H}\) with a linear regression, the slope of this relationship corresponds to the rate of decrease in RF when velocity increases over the entire acceleration phase (D RF , in % s m−1). It is worth noting that, since the starting block phase (push-off and following aerial time) lasts between 0.5 and 0.6 s (Slawinski et al. 2010; Rabita et al. 2015) and so occurs at an averaged time of ~0.3 s, RF and D RF can be reasonably computed from F H and F V values modeled for t > 0.3 s.
The biomechanical model and associated equations presented here allows the estimation of GRFs in the sagittal plane of motion during one single sprint running acceleration from simple inputs: anthropometric (body mass and stature) and spatiotemporal (split times or instantaneous running velocity) data. This model can then be used as a simple method to evaluate force, velocity and power capabilities and mechanical effectiveness during sprint running.
3 Limits of the Method
The biomechanical model presented in the previous section is a simple application of the basic principles of dynamics. However, as for all models, some simplifying assumptions have been required to model the horizontal force developed by the runner onto the ground during the entire sprint acceleration phase. Moreover, the macroscopic level of the model (kinematics and kinetics of the body CM) induces some limits in the level of analysis possible with this approach, which has to be considered for the interpretation of output variables. These different points are following discussed.
-
The dynamics principles were applied to a whole body considered as a system and represented by its centre of mass (e.g. Samozino et al. 2008, 2010, 2012; Cavagna et al. 1971; van Ingen Schenau et al. 1991; Helene and Yamashita 2010; Rabita et al. 2015). Only the forces aiming at moving the CM were considered.
-
The biomechanical model only focuses on GRF components in the sagittal plane of motion (i.e. vertical and antero-posterior) and neglects the medio-lateral component which was shown to constitute a negligible part in the total force produced by athletes (Rabita et al. 2015).
-
The horizontal aerodynamic friction coefficient \(\left( k \right)\) was proposed to be estimated from only stature, body mass and a fixed drag coefficient (Arsac and Locatelli 2002). Even if it does not represent the “gold standard” process, this represents a very simple method to estimate the aerodynamic resistive force out of laboratory. Moreover, the sensibility of the mechanical output variables to a likely error in the estimation of frontal area, air density or drag coefficient is low: a ~10% error in these input estimations leads to an error lower than 0.5% in the output variables.
-
In contrast with previous kinetic measurements during sprint running which averaged mechanical variables over each support phase (Morin et al. 2010, 2011a, 2012; Lockie et al. 2013; Rabita et al. 2015; Kawamori et al. 2014), computations lead here to modelled values over complete steps, i.e. contact plus aerial times, which induces lower values of force or power output. Step-averaged variables characterize more the mechanics of the overall sprint running propulsion than specifically the mechanical capabilities of lower limb neuromuscular system during each contact phase. However, this does not affect RF (and in turn D RF ) values since it is a ratio between two force components averaged over the same duration. Note that such values modeled over complete steps cannot bring information about inter-step variability, intra-step analyses or explorations of contact and aerial times, step length/frequency and force impulse and rate of development during sprint running.
-
Mechanical effectiveness computations required to model GRF vertical component over each step as equal to the runner’s body weight. This required the assumption of a quasi-null CM vertical acceleration over the acceleration phase of the sprint. However, be it with or without using starting blocks (but largely more pronounced with starting blocks), the runner’s body CM goes up during this phase from the starting crouched position to the standing running position, and then does not change from one complete step to another. Since the initial upward movement of the CM is overall smoothed through a relative long time/distance (~20–40 m, Cavagna et al. 1971; Slawinski et al. 2010), we can consider that it does not require any large vertical acceleration, and so that the mean net vertical acceleration of the CM over each step is quasi null throughout the sprint acceleration phase. This is even more correct for standing sprint starts which represents the most of the cases in sport other than track and field sprint events using starting blocks.
The above-mentioned simplifying assumptions are those inherent of all biomechanical models. The important thing is to quantify the errors induced by these simplifications. For that purpose, the simple method based on these computations and on simple anthropometric and spatiotemporal measurements was validated in comparison to the reference force plate measurements.
4 Validation of the Method
The validity and the reliability of the simple sprint method presented in this chapter were tested through two different experimental protocols reported in details in Samozino et al. (2016).
4.1 Concurrent Validity Compared to Force Plate Measurements
The concurrent validity of the simple method was tested by comparison of modelled mechanical values obtained using the proposed computations to reference force plate measurements during an entire acceleration phase of a sprint.
Reference method. Antero-posterior and vertical GRF components, F-v, P-v and RF-v relationships and associated variables \(\left( {F_{0} \text{,}\,v_{0} \text{,}\,P_{{H_{\hbox{max} } }} \text{,}\,S_{FV} \text{,}\,D_{RF} } \right)\) were determined for nine elite or sub-elite sprinters using both the simple method and the method using a 6.60-m long force platform system (KI 9067; Kistler, Winterthur, Switzerland, sampling rate of 1000 Hz) recently proposed by Rabita et al. (2015), more details in Chap. 10). Briefly, since no 30- to 60-m long force plate systems existed, this method consisted in virtually reconstruct for each athlete the GRF signal of an entire single 40-m sprint acceleration by setting differently for each sprint the position of the starting blocks relatively to the 6.60-m long force platform system. So each athlete performed, after a standardized 45 min warm-up, 7 maximal sprints in an indoor stadium (2 × 10 m, 2 × 15 m, 20 m, 30 m and 40 m with 4 min rest between each trial). During each sprint, GRF data were collected over the 6.60 m section covered by the force plate system, the latter being placed at different positions of the acceleration phase for each sprint. Instantaneous data of vertical (F V ) and horizontal antero-posterior (F H ) GRF components were averaged for each step (contact + aerial phase) to compute the above-mentioned variables.
Simple method. In parallel to force plate measurements, sprint times were measured with a pair of photocells (Microgate, Bolzano, Italy) located at the finish line of the different sprints. The 5 split times at 10 (best one of the two trials), 15 (idem), 20, 30 and 40 m were then used to determine \(v_{{H_{\hbox{max} } }}\) and τ using Eq. 11.7 and least square regression method. From these two parameters, \(v_{H} \left( t \right)\) and \(a_{H} \left( t \right)\) were modelled over time (every 0.1 s) using Eqs. 11.6 and 11.8, respectively. From \(a_{H} \left( t \right)\text{,}\,F_{H} \left( t \right)\text{,}\,P_{H} \left( t \right)\) and RF(t) were computed using equations and data processing presented in Sect. 11.2 in order to determine all the mechanical variables for each subject.
Results showed that modeled force (F H , F V , resultant), power and RF values were very close to values measured by force plates at each step with low standard errors of estimate of ~30–50N, ~230W and 3.7%, respectively (as shown for a typical subject in Fig. 11.5). Over the first 20–30 m, F V values measured with force plates were not particularly higher than body weight (Fig. 11.5) and were very close to body weight when averaged over the entire acceleration phase (difference lower than ~2.40% in average). This supports the assumption of a quasi-null vertical acceleration of the CM over this phase (despite the use of starting blocks), and in turn supports the validity of step averaged F V modelled values as equal to body weight. Beyond the very good agreement in the modeled GRF in the sagittal plane of motion (horizontal, vertical and resultant) during sprint running acceleration, low bias in the determination of F 0, v 0, \(P_{{H_{\hbox{max} } }}\), S FV and D RF were observed: lower than ~5% for F 0, v 0 and \(P_{{H_{\hbox{max} } }}\); and lower than 8% for S FV and D RF (Table 11.1). These low bias were associated to narrowed 95% agreement limits crossing 0, which support the high accuracy and validity of the proposed simple method to determine F-v, P-v and RF-v relationships and their associated mechanical variables \(\left( {P_{{H_{\hbox{max} } }} ,F_{0} ,v_{0} ,S_{FV} ,D_{RF} } \right)\) in sprint running (Fig. 11.6).

Changes over the acceleration phase in horizontal velocity (v H , black points), horizontal (F H , open diamonds) and vertical (F V , grey diamonds) force components, horizontal power output (\(P_{{H_{\hbox{max} } }}\), black diamonds), and ratio of force (RF, open circles) for a typical sprinter. Points represent averaged values over each step obtained from force plate method (from five sprints) and lines represent modelled values computed by the simple sprint method from split times

Force- power- and RF-velocity relationships obtained by both methods for a typical athlete. Filled diamonds represent averaged values over each step obtained from force plate method, solid lines the associated regressions, and grey lines the modelled values computed by the proposed simple method confounded with the associated regressions (dashed lines)
The kinematic input variables of the present simple method are spatio-temporal data: split times (as used in the validation protocol) or instantaneous running velocity measurements (as could be obtained from radar guns, (e.g. di Prampero et al. 2005; Morin et al. 2006), or laser beams, (e.g. Bezodis et al. 2012) during one single sprint. So, the simple sprint method was also tested during the same protocol from data measured using a radar (Stalker ATS System, Radar Sales, Minneapolis MN, USA, 46.875 Hz) during the best sprints of the 30- and 40-m trials. Results were very similar to those obtained from split times, with slightly higher bias values (absolute bias from 3 to 7%) due the fact that the comparison was made between mechanical variables obtained from one single sprint using the simple method and data obtained from 5 sprints with the reference method. This could have added a bias that would have only been associated to the validation protocol itself, and not to the method.
4.2 Reliability
The inter-trial reliability of the simple method was tested in a second protocol during which six high-level sprinters performed three maximal 50-m sprints with 10 min of rest between each trial. The different mechanical variables \(F_{0} ,v_{0} ,S_{FV} ,P_{{H_{\hbox{max} } }} \,\text{and}\,D_{RF}\) were obtained with the same data processing as presented before for the proposed computation method, except that \(v_{{H_{\hbox{max} } }}\) and τ were determined using Eq. 11.6, least square regression method and \(v_{H} \left( t \right)\) measured by the radar system (sample rate 46.875 Hz). The latter was placed on a tripod 10 m behind the subjects at a height of 1 m corresponding approximately to the height of subjects’ CM (di Prampero et al. 2005; Morin et al. 2012). For all the mechanical variables, low coefficients of variation between the two best trials and standard errors of measurement were observed (<5%, Table 11.2) and were associated to change in the mean close to 0. This showed low systematic and random errors, and in turn high test-to-test reliability.
Through this study (Samozino et al. 2016), we clearly show that the simple method based on a macroscopic biomechanical model and only anthropometric (body mass and stature) and spatio-temporal (split times or instantaneous velocity) variables easy to obtain out of laboratory, is accurate, reliable and valid to evaluate force, velocity and power capabilities, as well as mechanical effectiveness, during sprint running.
5 Technologies and Input Measurements
As for the different simple methods presented in this book, the accuracy and reliability of the present simple sprint method depends on the accuracy of the devices used to obtain the mechanical inputs of the model, i.e. the position-time or velocity-time data here. Note that body mass has to be measured with shoes and clothes used during the tests.
5.1 Split Times
When using split times as input data of the simple sprint method (using Eq. 11.7), as it was done in the above-described validation protocol, at least 4 or 5 split times are required over the acceleration phase to obtain reliable mechanical output variables. According to the level of the athletes, the distances associated to the different split times would be different in order to cover all the acceleration phase: from start line to 30 m (for non-expert sprinters), until to 50–60 m (for track and field sprinters). These distances have to be shorter at the beginning than at the end of the acceleration phase since the higher the acceleration magnitude (and so in the first meters of the sprint), the higher the number of split time needed to well describe the change in motion velocity. For instance, for soccer or rugby players, split times should be at 5, 10, 15, 20 and 30 m. For 100-m sprinters, they could be at 5, 10, 15, 30 and 40 m. Different devices can be used in field conditions to measure split times during a sprint acceleration, the main of them are presented here.
Fully automatic timing systems. The gold standard device to measure accurately and reliably split times during sprints is the fully automatic timing systems including silent gun and photo-finish camera (Haugen and Buchheit 2016). They present timing resolution up to 0.0005 s and are mostly and quasi only used in international athletics competition. They are too expensive and impractical for sport practitioners and scientists. However, since the 1987 World Championships in Rome, the International Association of Athletics Federations (IAAF) has provided biomechanics reports presenting split times for each 10- or 20-m sections for the 100-m race in both men and women. Analysing these data, combined those obtained during individual World Record races or Olympic Games, with the above-presented simple computations has recently allowed us to explore the mechanical determinants of 100-m sprint running performance in the world’s fastest men and women, and so the limits of human sprinting performance (Slawinski et al. 2017, see Sect. 11.6.3). Since a sprint acceleration actually starts when the force production on the ground firstly rises, the reaction time has to be removed from the different split times to consider only the CM kinematics (and not the global 100-m sprint performance) to estimate kinetics variables.
Photocells. In sprint testing or training, photocells are the most used system to measure split times usually with a resolution of 1 ms. Different photocell timing systems exist with different methods to start the timer: a pair of cells placed just (20–50 cm) in front of the athlete positioned on the starting line, a finger pod on the floor under the thumb for three-point starts or foot pod under the back foot (Haugen and Buchheit 2016). As mentioned before, to use split times as input in the simple sprint method, they have to be measured from the first force production on the ground. We determined that the best method to estimate these split times is to add 0.1 s to split times measured with athletes using a three-point crouching starting position and with photocells using a finger pod on the floor under the thumb to start the timer. This 0.1 s time delay was quantified on several sprinters using force plate and high speed camera (Samozino et al. 2016). Other methods, for instance using a pair of photocells placed just in front of the starting line, would overestimate force and power output computed by the simple method, even if reliability remains very good if photocells are always set at the same place over the different testing sessions.
High speed cameras. With the multiplication and generalization of high-speed cameras presenting high pixel resolutions and high frame rates (up to 240 frames per second in the very recent smartphone and tab), measuring split times using video provides accurate enough information to compute reliably mechanical variables from the simple sprint method. The higher the frame rate, the higher the accuracy. We think that the frame rate has to be at least 100 frames per second to obtain relevant outcomes. To obtain split times from video analysis, it requires to position several markers on the track at the 4–5 different distances and determine times when athletes cross the markers with their hip or shoulders. This can be done using a travelling camera moving at the same velocity as the athlete to film the sprint from the side or using a fixed camera placed at a given distance from the track at the marker positioned at the half of the acceleration targeted distance (i.e. at 15 or 20 m for a 30- or 40-m acceleration, respectively). In the latter case, video parallax was corrected to ensure the different split times are measured properly when athletes cross the different targeted distances. A simple methods for parallax correction is proposed, detailed and illustrated in Romero-Franco et al. (Fig. 1 in Romero-Franco et al. 2016). As for photocells, the critical point is the criterion considered to start the timer, i.e. to determine the frame corresponding to the start of the sprint which corresponds, from a mechanical point of view, of the beginning of the force production. We proposed to make athletes start with a three-point starting position, to consider the frame at which the thumb leaves the ground as the frame 0, and then add 0.1 s at each split time. Recently, a smartphone application (MySprint) was designed by Pedro Jimenez-Reyes to compute all the sprint mechanical variables using the computations of present simple sprint method and split times measured with the 240-fps camera of recent iPhones or Ipad (Fig. 11.7). Performance inputs (split times and velocity-time curves) and mechanical outputs (horizontal force and power, mechanical effectiveness) showed very high reliability (ICC > 0.99) and concurrent validity (standard error of estimate <1.3%) compared to reference devices (photocells and radar) (Romero-Franco et al. 2016). In our opinion, this low cost system (Iphone/Ipad + MySprint App) represents nowadays the best compromise between cost, validity/accuracy/reliability, direct feedback data, and ease to use and to carry on field.

The iPhone app “Mysprint” uses the high-speed video slow motion mode (frame rate of 240 fps) to measure the split times of a 30-m sprint acceleration, and thus compute all Force-velocity-Power profile and mechanical effectiveness variables
5.2 Instantaneous Velocity
Instantaneous velocity can also be used as input data of the simple sprint method and lead to similar concurrent validity in the estimation of mechanical variables characterizing force production during sprint acceleration (Samozino et al. 2016). Here are the main used devices to obtain velocity signal over time during such an all-out effort.
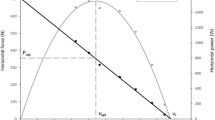
Laser and radar guns. Instantaneous velocity can be obtained using laser (e.g. LAVEG Sport laser speed gun, Jenoptik, Jena, Germany) or radar (e.g. Stalker ATS radar gun, Radar Sales, Minneapolis, MN, USA) systems which presents sampling rates of 100 and 46.875 Hz, respectively, high reliability and validity (Haugen and Buchheit 2016). Both of these guns are typically positioned 3–10 m behind the athletes at the starting line at a height of 1 m (corresponding approximately to the height of subjects’ centre of mass). For data analysis, only the acceleration phase is required to compute \(v_{{H_{\hbox{max} } }}\) and \(\uptau\) using an exponential regression (Eq. 11.6). So, all velocity values measured before the actual sprint start and after the maximal velocity plateau have to be deleted (Fig. 11.8). Contrary to split times for which each data depends on measurement triggering, instantaneous velocity values are independent from the previous ones, which avoids any bias due to the instant or the way the measurement is started. However, the detection of the actual sprint start on velocity data is often compromised by noise on the velocity signal due to movements of other things in the gun field of measurement just before the sprint start. If the first non-null velocity values considered is not the actual first one (i.e. athlete’s velocity), this could lead to overestimations of force and power variables. To face to this issue, we suggested to delete all the values for which there is a doubt between actual signal and noise, and then add a third parameter (a time delay, Δt, in s) to the mathematical exponential function in order to associate the first velocity value considered to the true time (Fig. 11.8). Including Δt in the Eq. 11.6 gives:

Typical data analysis when instantaneous velocity is measured by radar gun during a sprint acceleration. The first step is to delete uncertain raw velocity values for which there is a doubt between actual signal and noise at the start of the sprint and values after the maximal velocity plateau at the end of the sprint. Then, the raw values can be modelled using the mono-exponential regression including a time delay (Δt) in the equation
This data analysis method allows to improve the reliability and validity of velocity values, and associated computed distance and acceleration data, measured in the first 5–10 m of the acceleration phase (see Sect. 11.4), which was previously shown to be an issue for these devices (Haugen and Buchheit 2016; Bezodis et al. 2012). For instance, this time delay was not included in our computations for one of our first studies using this method (Buchheit et al. 2014b): F 0 showed acceptable absolute (CV 7.8%), but not relative reliability (ICC, 0.64) (Simperingham et al. 2016; Buchheit et al. 2014b). After using this time delay, reliability was highly improved (Samozino et al. 2016).
Global positioning systems. Global positioning system (GPS) devices have become popular in large-field ball sports for assessing players’ physical activity during competition or training (Aughey 2011). Their validity and reliability have been tested for measuring player kinematics on the field, notably distance and speed (Aughey 2011; Barbero-Alvarez et al. 2010; Jennings et al. 2010; Rampinini et al. 2015), accelerations being acceptable only with high-sampling-rate (>10 Hz) GPS devices (Buchheit et al. 2014a). Recently, the concurrent validity (radar-based method was the reference) of two distinct GPS units (5 and 20 Hz sampling rates) to obtain the sprint mechanical properties using the simple method was investigated (Nagahara et al. 2017). The results showed that GPS devices made possible to obtain consistent FvP profiles, but the percentage bias showed a wide range of overestimation or underestimation for both systems (−5.1 to 2.9% and −7.9 to 9.7% for 5- and 20-Hz GPS), even if the 90% confidence intervals of errors were smaller for the 20-Hz GPS than those for 5-Hz GPS. Consequently, the validity of computing mechanical outputs during sprint acceleration with GPS units (even at high sample rate) came short of acceptable level, although the accuracy with the higher-sampling-rate system was markedly higher than that with lower-sampling-rate system. When improved global or local positioning system technology becomes available, this opens interesting possibilities for practical measurements of sprint-acceleration mechanical features directly during training exercises or competition games, without setting specific tests.
6 Practical Applications
6.1 Testing Considerations
In addition to the accuracy of the devices used to measure velocity- or position-time data, the accuracy and reliability of the present simple sprint method depends also on the rigor with which the testing protocol is set and the data analyzed. Here, we will detail the different practical points of a typical testing session using the simple sprint method that contributes to decrease the measurement errors.
Warm-up. Since we aim to assess the individual maximal sprint capabilities, athletes have to perform a sprint specific warm-up allowing him to reach his maximal performances during the following test. For instance, warm-up should comprise ~5 to 10 min of low-pace running, followed by 3 min of lower limb muscle stretching, 5 min of sprint-specific drills, and 3–5 progressive 30–40 m sprints separated by 2 min of passive rest.
Number of trials and sprint distances. After warm-up, each athlete has to perform at least two sprints with maximal effort. More trials (3–5) is better to be sure to measure the athlete’s maximal capabilities, while rest between trials is sufficient to be sure that no fatigue occurs. Only the best performance (e.g. time at 30 m) will be then considered for analysis. Note that if the performance or mechanical outputs are too different between trials, the relevance of the data is altered. As mentioned before, the sprint distances should be different according to the level of the athletes in order to cover all the acceleration phase: ~30 m for non-expert sprinters (e.g. soccer or rugby players) until to 50–60 m for track and field sprinters.
Starting position. As mentioned in the previous section, when using split times (from photocells or high speed camera) as input measurement, the starting position should be a three-point crouching position with the start of the timer when the thumb leaves the ground and split times have to be corrected adding 0.1 s. When velocity is measured (radar or laser guns), the starting position can be set according to the specificity of the sport activity: starting-blocks, three-point crouching position, stand-up or others. The choice has to be done in order to evaluate the athlete’s force production capabilities in similar body configuration as during competition.
Shoes and running surfaces. Since the type of the ground surface (tarmac, wet/dry grass, tartan®, wood floor) and the properties of the shoe outsole (classical running shoes, spikes, cleats) influence the friction between feet and ground during sprint acceleration, the horizontal force production can be affected by both of them. Obviously, sprint testing should be performed in surface and shoe conditions similar as those used in competition. So, for routine and follow-up testing, it is important that sprints are always performed on the same surface using the same kind of shoes.
6.2 Data Interpretation
Beyond its accuracy and reliability, the interest of a simple field method rests on the good interpretation of the mechanical outputs, each of them presenting a very specific meaning, and the transfer to practical information for training purposes. Definition and practical interpretation of the main variables of interest when using FvP profiling in sprint have been well presented and discussed in Morin and Samozino (2016) and in previous section/chapter of the present book. Here, we will briefly sum-up the main indexes characterizing the athlete’s force production capabilities, in a logical order to well understand, and then improve, sprint mechanics (an example of such indexes for a typical athlete is presented in Table 11.3). Note that these several variables can be obtained after having determined τ and \(v_{{H_{\hbox{max} } }}\) from experimental data (velocity, split times) using least square regression method and Eq. 11.6 or 11.7, and computing at each instant (every 0.1 s or lower) \(a_{H} ,F_{H} ,v_{H} ,x,P_{H}\) and RF (see Sect. 11.2 for more details).
Index of sprint acceleration performance. The variable representing the athlete’s sprint acceleration performance is the most important since it is what athletes and coaches want to improve. This index should be chosen regarding the sport activity and the position of the player on the field for team sports. For instance, the performance can be characterized by the time at 50 m for 100-m sprinters, the time at 20 or 30 m for soccer players or rugby backs and the time at 10 or 15 m for a soccer goal keeper or rugby forwards. In some cases, the distance cover during a given time (for instance 2 or 4 s) also makes lots of sense. For the following variables, the distance or duration to consider for the acceleration phase have also to be determined according to the specificity of the performance to improve and the distance over which sprint acceleration should be optimized (short or long sprint accelerations).
Index of horizontal power and force produced during acceleration. Sprint acceleration performance is directly related to the mean horizontal power output developed over the acceleration phase (Morin et al. 2011a, 2012), and also in turn to the mean horizontal force produced since running speed is the consequence of the horizontal force production. So, mean horizontal power and mean horizontal force (expressed or not relatively to body mass) over the targeted distance/time are two macroscopic indexes of the athlete’s actual mechanical production during the test, even if the associated information are very close of those brought by the acceleration performance indexes.
Index of horizontal power and force production capabilities. The horizontal power and force actually produced during the sprint acceleration phase depends on the maximal horizontal force production capability. The latter can be dissociated in two different and independent abilities. First, the ability to produce very high level of horizontal force at low velocities is characterized by the theoretical maximal F H athlete can produced ( F 0 ) and mainly refers to the initial pushes of the athlete onto the ground during sprint acceleration. Second, the ability to keep developing horizontal force at very high velocities is quantified by the theoretical maximal velocity ( v 0 ) which represents the maximal velocity until which the athlete is able to produced horizontal force. The weight of F 0 and v 0 in mean force production, and so in sprint acceleration performance, depends on the acceleration distance to cover. The maximal power output \((P_{{H_{\hbox{max} } }} )\) is the combination of F 0 and v 0, and reflects the overall mechanical output capabilities of the athlete.
Indexes of mechanical effectiveness of force application. The capability to produce horizontal force during sprinting depends on lower limb capability to produce force and on the ability to orient it effectively (i.e. horizontally) onto the ground. The overall mechanical effectiveness of an athlete during sprinting acceleration is well quantified by the mean RF over the targeted distance/time. As for the force production capabilities, the overall mechanical effectiveness can be dissociated in two different abilities. First, the ability to orient effectively the force produced at low velocities, i.e. in the first steps of the acceleration phase, is well characterized by the maximal RF value ( RFmax ). Second, the ability to maintain high level of effectiveness despite the increase in velocity, well quantified by the rate of decrease in RF with velocity ( D RF ). The analysis of these different mechanical effectiveness indexes in parallel with the previous ones related to force production capabilities allows coaches to distinguish what is associated to athlete’s “physical” qualities (lower limb muscle force production capabilities) and “technical” abilities (mechanical effectiveness of force application), which can help them to orient training on each athlete’s strengths and/or weaknesses in the aims to improve performance or prevent from some muscular injuries. This will be addressed in the two following sections.
6.3 Optimization of Sprint Acceleration Performance
When a training program is designed to improve sprint acceleration performance, the simple sprint method and all the above-mentioned indexes can be used to compare athletes to others or to the rest of the team (e.g. Cross et al. 2015), and to follow each athlete within the season or between seasons. The training content can be individualized to mainly focus on weaknesses, while trying to keep strengths at similar level, and planned regarding the distance over which sprint acceleration should be optimized.
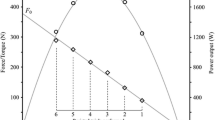
Comparison between athletes. The interest of FvP profiling to optimize sprint acceleration performance has been well illustrated through the case report presented in Morin and Samozino (2016) with two rugby players of an elite union team (Fig. 11.9). They have similar sprint acceleration performance over 20 m, but with opposite force production capabilities. Player #1 presents higher horizontal force production capabilities in the first slow steps of the sprint (i.e. higher F 0) but lower ones at high velocities (i.e. v 0) than Player #2. These differences in horizontal force production are mainly due to differences in mechanical effectiveness: Player #1 has a higher mechanical effectiveness at low running speeds than Player #2 (RFmax), but he is less able to maintain this effectiveness when speed increases (D RF = −7.7% s m-1, i.e. loss of 7.7% of effectiveness at each increase of 1 m s−1 in speed) compared to Player #2 for who the effectiveness is only altered by 5.8% for the same speed increment. If the training program for these two players is designed to improve sprint performance (e.g., here 20-m time), it should target different capabilities. A similar program given to these players, based on the fact that they have similar 20-m sprint times, will very likely result in suboptimal adaptations for both of them. Player #2 should develop F 0 through increasing RFmax and/or his lower limb muscle power (to increase the amount of total force produced). The latter can be assessed using FvP profiling in jumping described in Chap. 4. Contrastingly, Player #1 has to increase v 0, notably by improving his mechanical effectiveness at high velocities in order to decrease D RF .

Horizontal force-velocity profiles of 2 elite rugby union players obtained using the simple sprint method from maximal 30-m sprints. Both players reached their maximal running speed before the 30-m mark
Effect of training. Training programs focusing on F 0 or v 0 are very different since they refer to opposite training modalities associated to different movement velocities, force to produce, body positions or segment configurations. For instance, resisted sled training represents a specific means of providing overload to horizontal-force capacities which is practical and cost-effective training modality, and which can be used very easily by soccer players of all levels (Petrakos et al. 2016). We recently showed that very-heavy sled training using much greater loads than traditionally recommended (sled with a load of ~80% of body mass, Cross et al. 2017) clearly increased F 0 and RFmax, with trivial effect on v 0 (Morin et al. 2017). Contrastingly, training horizontal force production specifically at very high velocities, as during over speed conditions, should improve D RF and v 0 (work currently in progress). Recently, a case report from Cameron Josse, an US strength and conditioning coach, brought supports to the sensibility of v 0 to specific training. He used FvP profile in sprinting (using MySprint App) with a National Football League Linebacker during an 8 week training focusing on high velocity sprinting. This training included long accelerations (from 20 to 50 m), most of them being performed in an upright posture, technical drills aiming at emphasizing frontside mechanics when running upright and some horizontal plyometrics (e.g. power skips for maximal distance). This training induced a decrease in F 0, RFmax and \(P_{{H_{\hbox{max} } }}\), but an increase in v 0, 10-m mean RF and D RF (Table 11.2). This leads to improvements in the actual maximal running speed reached (~+6%) and time to cover 30 m (~+3%), while no gain in 10- and 20-m split times (Table 11.2). This case report well supports the positive effect of training exercises focusing on improving the ability to keep producing horizontal force at high velocities (and so with an upright position) on v 0 and D RF , and in turn on long sprint acceleration performance.
Force-velocity profile versus Split times. Since 5-m splits and 30–40-m flying splits are well correlated with F 0 or v 0, respectively (personal data), some strength and conditioning coaches have used these split times or their ratio (5-m/30–40 m) to have information about force and velocity capabilities of their athletes/players. This could give an overall good view of the individual F-v profile in sprinting, but limited and approximate. Indeed, considering a performance (here sprint split times) as an interchangeable information for the underlying neuromuscular properties or physiological mechanisms (even if there are good correlations between them) can lead to inaccuracies, which can be acceptable for recreational athletes but risked for high level population. This is a bit like considering jump height is a good index of lower limbs maximal power, which is not exactly the case as discussed in the previous chapter on the optimal F-v profile (Chap. 5). Personal simulations performed using the published equations show that two players may have the same 5-m splits and different F-v profiles characterized by different F 0 (up to 10–15%). The F-v profile is interesting since it brings information about what causes the performance, and not the performance per se (Buchheit et al. 2014b). The latter depends on other factors than only the mechanical properties, as the body mass (same split times with two different body mass does not correspond to the same F-v profile) or the distance targeted for the split times. Moreover, split times do not differentiate between force production capability and the effectiveness of force application, which brings very interesting additional information, as illustrated in the previous case report. Finally, we have no idea towards which value should tend a short/long split ratio (5-m/30–40 m), while the optimization of the F-v profile in sprint is conceivable, as it has been done in jumping with the optimal F-v profile (current work in progress).
6.4 Hamstring Injury Prevention and Monitoring of the Return to Sport
Given (i) the role of hip extensors, and notably hamstrings, in horizontal force production during sprinting (see section about “the hip extensors hypothesis” in previous chapter) and (ii) the high occurrence of hamstring muscle injuries during high-speed and power actions such as sprinting, notably in soccer (Woods et al. 2004), it could have been expected that the alteration of hamstring muscle function (as before or after an injury) could affect FvP profile in sprinting. So, through collaborations leaded by Jurdan Mendiguchia, we have recently studied FvP profile in sprint in the context of hamstring injuries.
FvP profile in sprint and return to sport after a hamstring injury. First, we showed that soccer players returning from a recent hamstring injury and being cleared to play, had substantial lower sprinting speed performance and reduced mechanical horizontal properties, notably F 0, compared with the uninjured players (Mendiguchia et al. 2014). Approximately two months of regular soccer training after return to sport, substantial improvements in sprinting speed (acceleration) were observed concomitantly with an increase in F 0 until similar levels as uninjured players, whereas v 0 remained unaltered (Fig. 11.10). Therefore, practitioners should consider assessing and training horizontal force production during sprint running after acute hamstring injuries in soccer players before return to sport. Second, the sensibility of F 0 to weakness or alteration of hamstring muscles were supported by the changes in FvP properties of sprinting in two injury case studies related to hamstring strain management (Mendiguchia et al. 2016). The Case #1 concerned a professional rugby player during a repeated sprint task (10 sprints of 40 m) when an injury occurred (5th sprint). The Case #2 refers to a professional soccer player prior to (8 days) and after (33 days) an acute hamstring injury. The results showed that F 0 was altered both before and after return to sport from a hamstring injury in these two elite athletes with little or no change in v 0. They also underlined that the simple on-field sprinting method was sensitive enough to indicate specific changes in horizontal mechanical properties pre- or pro-ceding an acute hamstring injury (the delay between the change observed in mechanical outputs and the injury might be as short as one or two sprints in the rugby player’s case). So, practitioners should consider regularly monitoring horizontal force production during sprint running both from a performance and injury prevention perspective.

Force- and power-velocity relationships (and associated F 0 , v 0 and P Hmax ) of soccer players at the moment of return to sport after an hamstring muscle injury and 2 months after return to sport, and of uninjured soccer players. Lines represents averaged curves of the groups (standard deviations are not shown for clarity reasons) (from Mendiguchia et al. 2014)
FvP profile in sprint and hamstring injury prevention. Given the previous results about association between horizontal force capabilities and hamstring muscles alterations, we hypothesized that lower and/or decrease in the horizontal force propulsion could reveal a functional weakness of hamstring muscles which could predispose them to an upcoming injury (Edouard et al. in submission process). This was tested on a cohort of 93 collegiate Japanese soccer players over an entire season with tests of sprint FvP profile every three months. Results showed that, in addition to the fact that previous hamstring injury was associated with higher risk of new hamstring injury (as previously reported), a lower F 0 was statistically related to a higher risk of sustaining a new hamstring injury. These findings, based only on tests over one season and 8 hamstring injuries, have to be confirmed by further prospective cohort study, which is currently in progress.
6.5 Better Understanding of the Limit of Human Sprinting Performance
Besides to be a practical method to be used for performance optimization and injury prevention, the sprint simple method can also help to bring new insights into the limits of human locomotion since it makes possible to estimate sprinting mechanical properties of the fastest men and women on earth of all time, without having testing them in the lab. In 2017, we compared the FvP profiles of women and men during 100-m finals of international events (World championships and Olympic Games) of the past 30 years based on split times provided by the IAAF Biomechanics reports after most of these competitionsFootnote 1 (Slawinski et al. 2017). This comparison allowed to better understand the origins of differences in sprint running performances between men and women, notably during the acceleration phase. All the sprinting FvP profile variables were greater in men than in women. The ~20% higher \(P_{{H_{\hbox{max} } }}\) values for men were explained by both ~10% higher F 0 (normalized to body mass) and v 0 values (Fig. 11.11). However, when standardized to inter-individual variability, the difference in v 0 between men and women is extremely large (effect size of 5.5) while the difference in F 0 is only moderate (effect size = 0.88). Moreover, only v 0 was correlated to 100-m performance, which means that the higher 100-m sprinting performances in men compared to women are mainly explained by a higher capability to keep producing horizontal force onto the ground at very high velocity, and thus to keep accelerating.

Mean ± SD of force- and power-velocity relationships of world class women (solid lines) and men (dashed lines) athletes during 100-m finals of international events (World championships and Olympic Games) of the past 30 years based on split times provided by the International Association of Athletics Federations Biomechanics reports (from Slawinski et al. 2017)
When we focus on the acceleration phase of some historical 100-m World records, we can have a roughly view of the evolution over time in the limit of human sprinting mechanical properties. Based on split and reaction times provided by the IAAF Biomechanics reports, sprinting FvP profiles has been estimated for the world records of Carl Lewis in 1991 (9.86 s, Tokyo), Maurice Greene in 1999 (9.79 s, Athens) and Usain Bolt in 2009 (9.58 s, Berlin), each of them representing a specific era in the sprint story. An approximate estimation of the FvP profile of Jesse Owens when he obtained the World record in 1936 (10.2 s, Chicago) has also been done, but with less reliability than the previous ones. Figure 11.12 presented their FvP profiles, and shows that the increase in 100-m performance is associated to an increase in power capabilities and an overall shift to the top and the left of the F-v relationship. These changes were mainly due to changes in equipment (notably from forties to nineties with for instance spikes and Tartan(R)), training methods and loads or athlete’s professionalization. It is worth noting that Maurice Green and Usain Bolt presented similar maximal power output during their World record, but with a different Fv profile: a Fv profile more oriented towards velocity capabilities for Bolt. Even if Bolt ran the 10 first meters slower than Green (1.74 s vs. 1.73 s, respectively, reaction time not included), he would have virtually been in front of Green from ~20 m (2.76 s vs. 2.73 s, respectively, reaction time not included) to the finish line. This underlines the higher importance, in long sprint performance, of the capability to keep producing horizontal force at high velocities than the capability to produce high level of horizontal force at low ones. This specific capability seems to be the main limit of human high speed bipedal locomotion.

Estimations of force- and power-velocity relationships of four historic 100-m World record holders: Jesse Owens in 1936 (10.2 s, Chicago), Carl Lewis in 1991 (9.86 s, Tokyo), Maurice Greene in 1999 (9.79 s, Athens), Usain Bolt in 2009 (9.58 s, Berlin). These sprinting mechanical properties have been estimated from split times of the acceleration phase of their respective World record run, which was provided by the International Association of Athletics Federations Biomechanics reports
7 Conclusion
This chapter presents an accurate and reliable simple method to determine the mechanical properties of the force production during sprinting. This method, based on a macroscopic biomechanical model and validated in laboratory conditions in comparison to force plate measurements, is very convenient for field use since it only requires anthropometric (body mass and stature) and spatio-temporal (split times or instantaneous velocity) input variables. It provides different information on the athlete’s horizontal force production capabilities: maximal power output, maximal horizontal force, maximal velocity until which horizontal force can be produced and mechanical effectiveness of force application onto the ground. These information present interesting practical applications for sport practitioners to individualize training focusing on sprint acceleration performance, but also in hamstring injury prevention perspectives.
Notes
References
Arsac LM, Locatelli E (2002) Modeling the energetics of 100-m running by using speed curves of world champions. J Appl Physiol 92(5):1781–1788. https://doi.org/10.1152/japplphysiol.00754.2001
Aughey RJ (2011) Applications of GPS technologies to field sports. Int J Sports Physiol Perform 6(3):295–310
Barbero-Alvarez JC, Coutts A, Granda J, Barbero-Alvarez V, Castagna C (2010) The validity and reliability of a global positioning satellite system device to assess speed and repeated sprint ability (RSA) in athletes. J Sci Med Sport 13(2):232–235. https://doi.org/10.1016/j.jsams.2009.02.005
Bezodis NE, Salo AI, Trewartha G (2012) Measurement error in estimates of sprint velocity from a laser displacement measurement device. Int J Sports Med 33(6):439–444. https://doi.org/10.1055/s-0031-1301313
Buchheit M, Al Haddad H, Simpson BM, Palazzi D, Bourdon PC, Di Salvo V, Mendez-Villanueva A (2014a) Monitoring accelerations with GPS in football: time to slow down? Int J Sports Physiol Perform 9(3):442–445. https://doi.org/10.1123/ijspp.2013-0187
Buchheit M, Samozino P, Glynn JA, Michael BS, Al Haddad H, Mendez-Villanueva A, Morin JB (2014b) Mechanical determinants of acceleration and maximal sprinting speed in highly trained young soccer players. J Sports Sci 32(20):1906–1913. https://doi.org/10.1080/02640414.2014.965191
Cavagna GA, Komarek L, Mazzoleni S (1971) The mechanics of sprint running. J Physiol 217(3):709–721
Chelly SM, Denis C (2001) Leg power and hopping stiffness: relationship with sprint running performance. Med Sci Sports Exerc 33(2):326–333
Cross MR, Brughelli M, Brown SR, Samozino P, Gill ND, Cronin JB, Morin JB (2015) Mechanical properties of sprinting in elite rugby union and rugby league. Int J Sports Physiol Perform 10(6):695–702. https://doi.org/10.1123/ijspp.2014-0151
Cross MR, Brughelli M, Samozino P, Brown SR, Morin JB (2017) Optimal loading for maximising power during sled-resisted sprinting. Int J Sports Physiol Perform 1–25. https://doi.org/10.1123/ijspp.2016-0362
di Prampero PE, Botter A, Osgnach C (2015) The energy cost of sprint running and the role of metabolic power in setting top performances. Eur J Appl Physiol 115(3):451–469. https://doi.org/10.1007/s00421-014-3086-4
di Prampero PE, Fusi S, Sepulcri L, Morin JB, Belli A, Antonutto G (2005) Sprint running: a new energetic approach. J Exp Biol 208:2809–2816
Edouard P, Nagahara R, Samozino P, Rossi J, Brughelli M, Mendiguchia J, Morin J (under review) Is maximal horizontal force output during sprint acceleration associated with increased risk of hamstring muscle injuries in soccer: a pilot prospective study?
Furusawa K, Hill AV, Parkinson JL (1927) The dynamics of “sprint” running. Proc R Soc B 102:29–42
Haugen T, Buchheit M (2016) Sprint running performance monitoring: methodological and practical considerations. Sports Med 46(5):641–656. https://doi.org/10.1007/s40279-015-0446-0
Helene O, Yamashita MT (2010) The force, power and energy of the 100 meter sprint. Am J Phys 78:307–309
Henry FM (1954) Time-velocity equations and oxygen requirements of “all-out” and “steady-pace” running. Res Q 25:164–177
Jaskolska A, Goossens P, Veenstra B, Jaskolski A, Skinner JS (1999) Treadmill measurement of the force-velocity relationship and power output in subjects with different maximal running velocities. Sports Med Train Rehab 8:347–358
Jaskolski A, Veenstra B, Goossens P, Jaskolska A, Skinner JS (1996) Optimal resistance for maximal power during treadmill running. Sports Med Train Rehabil 7:17–30
Jennings D, Cormack S, Coutts AJ, Boyd LJ, Aughey RJ (2010) Variability of GPS units for measuring distance in team sport movements. Int J Sports Physiol Perform 5(4):565–569
Kawamori N, Newton R, Nosaka K (2014) Effects of weighted sled towing on ground reaction force during the acceleration phase of sprint running. J Sports Sci 32(12):1139–1145. https://doi.org/10.1080/02640414.2014.886129
Lockie RG, Murphy AJ, Schultz AB, Jeffriess MD, Callaghan SJ (2013) Influence of sprint acceleration stance kinetics on velocity and step kinematics in field sport athletes. J Strength Cond Res 27(9):2494–2503. https://doi.org/10.1519/JSC.0b013e31827f5103
Mendiguchia J, Edouard P, Samozino P, Brughelli M, Cross M, Ross A, Gill N, Morin JB (2016) Field monitoring of sprinting power-force-velocity profile before, during and after hamstring injury: two case reports. J Sports Sci 34(6):535–541. https://doi.org/10.1080/02640414.2015.1122207
Mendiguchia J, Samozino P, Martinez-Ruiz E, Brughelli M, Schmikli S, Morin JB, Mendez-Villanueva A (2014) Progression of mechanical properties during on-field sprint running after returning to sports from a hamstring muscle injury in soccer players. Int J Sports Med 35(8):690–695. https://doi.org/10.1055/s-0033-1363192
Morin JB, Bourdin M, Edouard P, Peyrot N, Samozino P, Lacour JR (2012) Mechanical determinants of 100-m sprint running performance. Eur J Appl Physiol 112(11):3921–3930. https://doi.org/10.1007/s00421-012-2379-8
Morin JB, Edouard P, Samozino P (2011a) Technical ability of force application as a determinant factor of sprint performance. Med Sci Sports Exerc 43(9):1680–1688
Morin JB, Jeannin T, Chevallier B, Belli A (2006) Spring-mass model characteristics during sprint running: correlation with performance and fatigue-induced changes. Int J Sports Med 27(2):158–165. https://doi.org/10.1055/s-2005-837569
Morin JB, Petrakos G, Jimenez-Reyes P, Brown SR, Samozino P, Cross MR (2017) Very-heavy sled training for improving horizontal-force output in soccer players. Int J Sports Physiol Perform 12(6):840–844. https://doi.org/10.1123/ijspp.2016-0444
Morin JB, Samozino P (2016) Interpreting power-force-velocity profiles for individualized and specific training. Int J Sports Physiol Perform 11(2):267–272
Morin JB, Samozino P, Bonnefoy R, Edouard P, Belli A (2010) Direct measurement of power during one single sprint on treadmill. J Biomech 43(10):1970–1975
Morin JB, Samozino P, Edouard P, Tomazin K (2011b) Effect of fatigue on force production and force application technique during repeated sprints. J Biomech 44(15):2719–2723. https://doi.org/doi:10.1016/j.jbiomech.2011.07.020 (S0021-9290(11)00526-4 [pii])
Nagahara R, Botter A, Rejc E, Koido M, Shimizu T, Samozino P, Morin JB (2017) Concurrent validity of GPS for deriving mechanical properties of sprint acceleration. Int J Sports Physiol Perform 12(1):129–132. https://doi.org/10.1123/ijspp.2015-0566
Petrakos G, Morin JB, Egan B (2016) Resisted sled sprint training to improve sprint performance: a systematic review. Sports Med 46(3):381–400. https://doi.org/10.1007/s40279-015-0422-8
Rabita G, Dorel S, Slawinski J, Saez de villarreal E, Couturier A, Samozino P, Morin JB (2015) Sprint mechanics in world-class athletes: a new insight into the limits of human locomotion. Scand J Med Sci Sports. https://doi.org/10.1111/sms.12389
Rampinini E, Alberti G, Fiorenza M, Riggio M, Sassi R, Borges TO, Coutts AJ (2015) Accuracy of GPS devices for measuring high-intensity running in field-based team sports. Int J Sports Med 36(1):49–53. https://doi.org/10.1055/s-0034-1385866
Romero-Franco N, Jimenez-Reyes P, Castano-Zambudio A, Capelo-Ramirez F, Rodriguez-Juan JJ, Gonzalez-Hernandez J, Toscano-Bendala FJ, Cuadrado-Penafiel V, Balsalobre-Fernandez C (2016) Sprint performance and mechanical outputs computed with an iPhone app: comparison with existing reference methods. Eur J Sport Sci:1–7. https://doi.org/10.1080/17461391.2016.1249031
Samozino P, Morin JB, Hintzy F, Belli A (2008) A simple method for measuring force, velocity and power output during squat jump. J Biomech 41(14):2940–2945
Samozino P, Morin JB, Hintzy F, Belli A (2010) Jumping ability: a theoretical integrative approach. J Theor Biol 264(1):11–18
Samozino P, Rabita G, Dorel S, Slawinski J, Peyrot N, Saez de Villarreal E, Morin JB (2016) A simple method for measuring power, force, velocity properties, and mechanical effectiveness in sprint running. Scand J Med Sci Sports 26(6):648–658. https://doi.org/10.1111/sms.12490
Samozino P, Rejc E, Di Prampero PE, Belli A, Morin JB (2012) Optimal force-velocity profile in ballistic movements. Altius: citius or fortius? Med Sci Sports Exerc 44(2):313–322
Simperingham KD, Cronin JB, Ross A (2016) Advances in sprint acceleration profiling for field-based team-sport athletes: utility, reliability, validity and limitations. Sports Med 46(11):1619–1645. https://doi.org/10.1007/s40279-016-0508-y
Slawinski J, Bonnefoy A, Ontanon G, Leveque JM, Miller C, Riquet A, Cheze L, Dumas R (2010) Segment-interaction in sprint start: analysis of 3D angular velocity and kinetic energy in elite sprinters. J Biomech 43(8):1494–1502. https://doi.org/10.1016/j.jbiomech.2010.01.044
Slawinski J, Termoz N, Rabita G, Guilhem G, Dorel S, Morin JB, Samozino P (2017) How 100-m event analyses improve our understanding of world-class men’s and women’s sprint performance. Scand J Med Sci Sports 27(1):45–54. https://doi.org/10.1111/sms.12627
van Ingen Schenau GJ, Jacobs R, de Koning JJ (1991) Can cycle power predict sprint running performance? Eur J Appl Physiol Occup Physiol 63(3–4):255–260
Woods C, Hawkins RD, Maltby S, Hulse M, Thomas A, Hodson A, Football Association Medical Research P (2004) The football association medical research programme: an audit of injuries in professional football-analysis of hamstring injuries. Br J Sports Med 38(1):36–41
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2018 Springer International Publishing AG
About this chapter

Cite this chapter
Samozino, P. (2018). A Simple Method for Measuring Force, Velocity and Power Capabilities and Mechanical Effectiveness During Sprint Running. In: Morin, JB., Samozino, P. (eds) Biomechanics of Training and Testing. Springer, Cham. https://doi.org/10.1007/978-3-319-05633-3_11
Download citation
DOI: https://doi.org/10.1007/978-3-319-05633-3_11
Published:
Publisher Name: Springer, Cham
Print ISBN: 978-3-319-05632-6
Online ISBN: 978-3-319-05633-3
eBook Packages: Biomedical and Life SciencesBiomedical and Life Sciences (R0)