
Abstract
This paper introduces a novel type of passive control system designed to suppress unwanted vibrations in civil engineering structures subjected to base and lateral excitation. The new system configuration, inspired by traditional tuned mass dampers (TMD) where the mass element has been replaced with an inerter is presented. An inerter is a two-terminal flywheel device with the capacity to generate high apparent mass and it was initially developed for Formula 1 racing cars suspension systems. An analytical tuning procedure for inerter-based systems has been developed. This is inspired by traditional tuning rules for damped vibration absorbers. The inerter-based system performance is assessed in comparison to TMDs. It is shown that the new control system suppresses the response of all modes, which constitutes an advantage with respect to TMDs. Moreover, our analysis shows that the new system is most effective when located at ground storey level, which is advantageous for its installation. A multiple-degree-of-freedom structure is analysed numerically to verify our theoretical findings. This has been subjected to a range of excitation inputs, including wind and earthquake loads and its performance was similar or superior to that of TMDs, making the new device an attractive vibration-suppression method.
Access provided by Autonomous University of Puebla. Download conference paper PDF
Similar content being viewed by others
Keywords
53.1 Introduction
This paper proposes a design methodology for a passive inerter-based vibration suppression system installed in structures subjected to base- or lateral-excitation.
The inerter was introduced in the early 2000s by Smith [1] and was initially employed in Formula 1 racing cars suspension systems. The inerter completes the force-current analogy between mechanical and electrical networks, being the equivalent of the capacitor. The force generated by an inerter is proportional to the relative acceleration between its nodes (53.1). Its constant of proportionality is called inertance and is measured in kilograms.
where b is the inertance and \(\ddot{\mathbf{x}}_{i} -\ddot{\mathbf{x}}_{j}\) represents the relative acceleration between its nodes.
The most important feature of inerter devices consists in their ability of generating an apparent mass that can be much greater than their physical mass. This can be realised through a range of mechanisms such as racks and pinions or ball-screw mechanisms. More recently, inertial hydraulic devices, with a helical tube providing “gearing”, have also been patented [2].
The inerter’s fields of application has been extended to vehicle suspension systems [3–5], train suspension systems [6] and motorcycle steering compensator applications [7]. Studies on the optimal performance of the inerter-based vibration isolation systems are presented [8–10].
In the field of civil engineering, the inerter has firstly been employed in building suspension systems [11, 12]. An inerter-like ball-screw mechanism has also been used in vibration suppression as a component of tuned viscous mass damper (TVMD) systems [13]. The authors also study the modal response characteristics of a multiple-degree-of-freedom system incorporated with TVMDs [14]. More recently, TVMD systems have been installed in a multi-storey steel structure built in Japan [15].
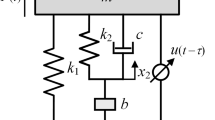
The inerter-based control system studied in this paper has been introduced by the authors in [16] and is referred to as a tuned inerter damper (TID). This systems preserves the layout of a traditional TMD system where the mass element has been replaced by an inerter. An analytical tuning method for TID systems is also given [16] and their performance is assessed in comparison to that of equivalent TMD and viscous damper systems. It was shown through modal analysis that the device is most efficient when located at bottom storey level.
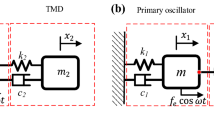
In Sect. 53.2, we introduce an n-DOF structure alternatively controlled using a TMD, a TID or a viscous damper. The structure is subjected to sinusoidal base excitation and triangularly-distributed lateral excitation as shown in Fig. 53.1. A tuning strategy based on Den Hartog’s guidelines for tuned vibration absorbers [17] in employed for both the TMD and TID systems. The TID system is then tuned using an iterative approach described in [18]. In Sect. 53.3 we apply the theoretical findings on a 5-DOF shear beam building. Conclusions are drawn in Sect. 53.4.
53.2 Structural System
The uncontrolled structure considered is represented by an n-storey plane frame modelled as a shear beam building and is represented in Fig. 53.1a. The structure is subjected to either base- or lateral- excitation as shown in Fig. 53.1b, c. In order to improve structural response, two types of control systems are considered: a TMD system located at top storey level and a TID system located at bottom storey level. Both systems are shown in Fig. 53.1b, c. Please note that the two control systems are not used simultaneously. Therefore in the TMD case b d = 0, while in the TID case m d = 0. For a better performance assessment, we will also consider for comparison a systems controlled using a single viscous damper located at bottom storey level.

(a) Uncontrolled system; (b) base excited system with a TMD installed at top storey level and a TID installed at bottom storey level; (c) laterally excited system with a TMD installed at top storey level and a TID installed at bottom storey level
The general equation of motion of the controlled structure is given by
where M (n × n), C (n × n) and K (n × n) are the mass, damping and stiffness matrices respectively; F c (t) is the force produced using one of the control systems considered and x(t) is the displacement vector. Please note that in this paper the structural damping is null. The force F e (t) is dependent on the type of excitation considered. In the case of base-excitation F e (t) = KI r(t), where I (n × 1) is a column vector showing how the ground excitation is distributed across the n DOF and r(t) = sin(ω t) represents the ground displacement. In the case of lateral excitation F e (t) = WF(t), where W (n × 1) \(= [1/n,2/n,\ldots,(n - 1)/n,1]\) is a vector describing the triangular distribution of the lateral loading as shown in Fig. 53.1c, F(t) = sin(ω t) and ω is the forcing frequency. The equations of motion can be written in the Laplace domain as a system of equations
where m and k represent the mass concentrated at each storey level and the structural stiffness between two consecutive storeys respectively; X i represents the Laplace transform of the i th storey displacement; F ci, i−1 represents the force exerted by the a control device located between storeys i − 1 and i on the i th mass and F ci, i+1 represents the force exerted by the a control device located between storeys i and i + 1 on the i th mass—see Fig. 53.1. For the base-excited structure F e1 = kR and F ei = 0 for any i = [2, …. , n], where R represents the Laplace transform of the ground displacement. For the laterally-excited structure \(F_{ei} = \mathbf{W}_{i}F\) for any i = [1, …. , n]. Following the approach described in [16], Sect. 2.1, the forces F c associated with the control devices can be written as
where T d is the control device transfer function given in Table 53.1 (where m d , b d , k d and c d represent the mass, inertance, stiffness and damping of the control systems). Note that for i = 0, X 0 = R for base excitation and X 0 = 0 for lateral excitation. In addition, l i, i+1 and d i are switches that allow us to generalise the device and indicate the location and type of device used respectively, as indicated in [16].
As described in [16], by combining the system shown in (53.3) with (53.4a) and (53.4b), we obtain a system of n equations with n unknowns represented by the displacements at each storey level. This system, particularised for lateral load is shown in (53.5). The equivalent system in the case of base excitation is given in [16].
53.3 Control Systems Tuning
The control systems tuning will target the first mode of vibration of the uncontrolled system.
53.3.1 Tuned Mass Damper
The TMD system is tuned according to Den Hartog’s guidelines for damped vibration absorbers. Both the TMD mass and stiffness are chosen with respect to the effective modal mass and stiffness of the first mode of vibration. For the system subjected to base excitation, the tuning is adapted according to [19] in order to obtain the optimum relative displacement of the controlled structure. The tuning relations are
where μ m is the TMD mass ration, m eff1 and k eff1 are the effective modal mass and stiffness of the first vibration mode, respectively. ζ is the TMD damping ratio. For the laterally-excited structure (when forces are applied on the structure), the optimum stiffness and damping coefficient in (53.6) become
53.3.2 Tuned Inerter Damper
The tuning strategy for the TID is based on a modal analysis which takes into account the only first mode of vibration. For base-excited structures, the transfer functions between the modal displacement and base displacement are given in [16] as
-
1.
TMD system located at top storey level;
$$\displaystyle{ \frac{Q_{1}} {R} = \frac{-\sum \limits _{i=1}^{n}(m_{i}\Phi _{i,1}){s}^{2} - \Phi _{n,1}T_{d}} {m_{eff1}{s}^{2} + k_{eff1} + T_{d}\Phi _{n,1}^{2}} }$$(53.8) -
2.
TID system located at bottom storey level;
$$\displaystyle{ \frac{Q_{1}} {R} = \frac{-\sum \limits _{i=1}^{n}(m_{i}\Phi _{i,1}){s}^{2}} {m_{eff1}{s}^{2} + k_{eff1} + T_{d}\Phi _{1,1}^{2}} }$$(53.9)
where \(\Phi _{i,j}\) represents the i-th component of the j-th eigenvector of the uncontrolled system. The transfer function obtained for a viscous damper located at bottom storey level is the same as that corresponding to the TID, as both systems are connected to the ground and to the first storey. However, the control systems transfer functions are different, as detailed in Table 53.1. In case of laterally-excited structures, (53.8) and (53.9) become
-
1.
TMD system located at top storey level;
$$\displaystyle{ \frac{Q_{1}} {R} = \frac{-\sum \limits _{i=1}^{n}(\mathbf{W}_{i}\Phi _{i,1})F} {m_{eff1}{s}^{2} + k_{eff1} + T_{d}\Phi _{n,1}^{2}} }$$(53.10) -
2.
TID system located at bottom storey level;
$$\displaystyle{ \frac{Q_{1}} {R} = \frac{-\sum \limits _{i=1}^{n}(\mathbf{W}_{i}\Phi _{i,1})F} {m_{eff1}{s}^{2} + k_{eff1} + T_{d}\Phi _{1,1}^{2}} }$$(53.11)
Looking at the two sets of equations above, it can be seen that a similar response can be obtained if the ratio between the TID and TMD transfer functions in \(\Phi _{n,1}^{2}/\Phi _{1,1}^{2}\). Therefore we will use this ratio as an initial estimate for the ratio between the TID and TMD parameters, m d , b d , k d and c d . Starting from these values, the values of k d and c d will be adjusted until the desired response in obtained. Further details are given in the section dedicated to the numerical application.
53.3.3 Viscous Damper
The damping in the viscous damper installed at bottom storey level is chosen such that we obtain similar response for all control systems in the vicinity of the first fundamental frequency.
53.4 Numerical Example
For a better understanding, we applied the concepts described in the previous section on a n = 5-DOF structure of the type shown in Fig. 53.1. The structural mass and stiffness at each storey level are \(m = 1\,\mathrm{kN{s}^{2}/m}\) and \(k = 1,500\,\mathrm{kN/m}\). The natural frequencies of the system are \(\Omega = [\omega _{1},\omega _{2},\omega _{3},\omega _{4},\omega _{5}] = [1.75,5.12,8.07,10.37,11.83]\,\mathrm{Hz}\). The first eigenvector, necessary for the evaluation of the transfer functions in (53.8)–(53.11), is
\(\phi _{1} = [\phi _{1,1},\phi _{2,1},\phi _{3,1},\phi _{4,1},\phi _{5,1}] = [-0.36,-0.68,-0.96,-1.15,-1.25]\).
53.4.1 Base-Excited Structure
The model of the base-excited in shown in Fig. 53.1b. The TMD controlled structure is obtained if we consider b d = 0. The tuning is done according to (53.6). The numerical values are given in Table 53.2.
The TID controlled structure is obtained if m d = 0. The TID parameters were obtained by scaling the TMD parameters using the coefficient \(\Phi _{5,1}^{2}/\Phi _{1,1}^{2} = 12.34\). The values obtained are given in Table 53.2. The viscous damper was tuned such that the response amplitude is similar to that of the TMD and TID systems, leading to a damping value that is 12 times larger than that in the TID damper. The maximum absolute displacements on the top DOF are shown via bode-plots in Fig. 53.2a. Figure 53.2b shows in more detail the behaviour of all control systems in the vicinity of the first fundamental frequency. As seen, all control systems improve the performance of the uncontrolled structure significantly. In case of the TID and TMD systems, the first resonant peak is split into two lower amplitude peaks. Therefore, for low excitation frequencies the TID has a TMD-like behaviour. In addition, the TID system is capable of suppressing the response of higher vibration modes, displaying a damper-like behaviour at high frequencies. This feature of the TID was explained in detail in [16].

Base-excited structure—TID tuning based only on the ratio \(\Phi _{n,1}^{2}/\Phi _{1,1}^{2}\): (a) frequency response of all structural systems; (b) zoom-in in the vicinity of the first fundamental frequency
The tuning guidelines given by Den Hartog are derived for SDOF systems. However, they can be used for MDOF systems as long as the vibration modes are well separated (\(\omega _{2}/\omega _{1} > 2\)) and the mass ratio is relatively small. Although both conditions are satisfied by the TMD system, the two response peaks are uneven, as modal interaction still influences the displacement response of the controlled structure. The same is true for the TID. Therefore, the TID system will be further tuned using the method described in [18]. Namely, we increase the stiffness k d until the two peaks have equal amplitudes and then vary c d such that the tangent through the two peaks to the response curve is horizontal. The result of this iterative procedure is shown in Fig. 53.3. The new parameters values are \(k_{d} = 196.6\,\mathrm{kN/m}\) and \(c_{d} = 4.5\,\mathrm{kNs/m}\).

Base-excited structure—TID iterative tuning: (a) frequency response of all structural systems; (b) zoom-in in the vicinity of the first fundamental frequency
53.4.2 Laterally-Excited Structure
The laterally-excited structure is shown in Fig. 53.1c. For the 5-DOF system, the lateral force distribution vector is \(\mathbf{W} = [1/5,2/5,3/5,4/5,1]\). As in the previous case, the TMD and TID controlled structures are obtained by alternatively considering b d = 0 and m d = 0 respectively. The tuning of the TMD system is done using (53.7) and the numerical values of all parameters are given in Table 53.3. The TID parameters were obtained by scaling the TMD parameters using the coefficient \(\Phi _{5,1}^{2}/\Phi _{1,1}^{2} = 12.34\), as in the case of the base excited structure. The values obtained are also listed in Table 53.3. The damping coefficient of the viscous damper is chosen in the same way as in the previous subsection.
The displacement response of the uncontrolled and controlled structures are shown in Fig. 53.4. As in the previous case, the three systems behave similarly in the vicinity of the first fundamental frequency (see Fig. 53.4b). However, only the TID and the viscous damper are capable of suppressing vibration of the higher modes.

Laterally-excited structure—TID tuning based only on the ratio \(\Phi _{n,1}^{2}/\Phi _{1,1}^{2}\): (a) frequency response of all structural systems; (b) zoom-in in the vicinity of the first fundamental frequency

Laterally-excited structure—TID iterative tuning: (a) frequency response of all structural systems; (b) zoom-in in the vicinity of the first fundamental frequency
We applied the same fine tuning for the TID. The result of this iterative procedure is shown in Fig. 53.5. The new parameters values are \(k_{d} = 199.6\,\mathrm{kN/m}\) and \(c_{d} = 4.5\,\mathrm{kNs/m}\). As seen, the behaviour of the TID system is superior to that of the damper and TMD systems.
53.5 Conclusion
In this paper, we studied the performance of a TID system installed at the bottom level of a 5-DOF structure. We proposed a tuning methodology based in Den Hartog’s guidelines for damped vibration absorbers and on the modal analysis of the TMD and TID controlled systems. In order to counteract the modal interaction effect, we have further tuned the TID system using an iterative procedure to obtain the optimum displacement response of the upper DOF. The structure was subjected to both base and lateral excitation in the form of sine-waves. The TID performance was assessed in comparison with that of a TMD system located at the top of the building and a viscous damper installed at bottom storey level. It was shown that the TID has a TMD-like behaviour in the vicinity of the first fundamental frequency and a damper-like behaviour at higher frequencies. Moreover, the TID is most efficient when located at bottom storey level, fact that is advantageous from the installation point of view.
References
Smith MC (2002) Synthesis of mechanical networks: the inerter. IEEE Trans Automat Control 47:1648–1662
Garner BG, Smith MC (2013) Damping and inertial hydraulic device. Patent Application Publication, No US 2013/0037362A1
Papageorgiou C, Smith MC (2005) Laboratory experimental testing of inerters. In: 44th IEEE conference on decision and control and the European control conference, Seville, Spain, pp 3351–3356
Papageorgiou C, Houghton NE, Smith MC (2009) Experimental testing and analysis of inerter devices. J Dyn Syst Meas Control ASME 131:011001-1 - 011001-11
Wang F-C, Chan H-A (2011) Vehicle suspensions with a mechatronic network strut. Int J Veh Mech Mobil 49(5):811–830
Wang F-C, Liao M-K, Liao B-H, Su W-J, Chan H-A (2009) The performance improvements of train suspension systems with mechanical networks employing inerters. Int J Veh Mech Mobil 47:805–830
Evangelou S, Limebeer DJN, Sharp RS, Smith MC (2007) Mechanical steering compensators for high-performance motorcycles. Trans ASME 74:332–346
Scheibe F, Smith MC (2009) Analytical solutions for optimal ride comfort and tyre grip for passive vehicle suspensions. J Veh Syst Dyn 47:1229–1252
Smith MC, Wang F-C (2004) Performance benefits in passive vehicle suspensions employing inerters. J Veh Syst Dyn 42:235–257
Wang F-C, Su W-J (2008) Impact of inerter nonlinearities on vehicle suspension control. Int J Veh Mech Mobil 46:575–595
Wang F-C, Chen C-W, Liao M-K, Hong M-F (2007) Performance analyses of building suspension control with inerters. In: Proceedings of the 46th IEEE conference on decision and control, New Orleans, pp 3786–3791
Wang F-C, Hong M-F, Chen C-W (2009) Building suspensions with inerters. Proc IMechE J Mech Eng Sci 224:1605–1616
Ikago K, Saito K, Inoue N (2012) Seismic control of single-degree-of-freedom structure using tuned viscous mass damper. Earthquake Eng Struct Dyn 41:453–474
Ikago K, Sugimura Y, Saito K, Inoue K (2012) Modal response characteristics of a multiple-degree-of-freedom structure incorporated with tuned viscous mass damper. J Asian Architect Build Eng 11:375–382
Sugimura Y, Goto W, Tanizawa H, Saito K, Nimomiya T (2012) Response control effect of steel building structure using tuned viscous mass damper. In: 15th world conference on earthquake engineering
Lazar IF, Neild SA, Wagg DJ (2013) Using an inerter-based device for structural vibration suppression. Earthquake Eng Struct Dyn. dOI: 10.1002/eqe.2390, available in Early View
Den Hartog JP (1940) Mechanical vibrations. McGraw Hill, New York
Lazar IF, Wagg DJ, Neild SA (2013) A new vibration suppression system for semi-active control of a two-storey building. In: 11th international conference on recent advances in structural dynamics, Pisa
Warburton GB (1982) Optimum absorber parameters for various combinations of response and excitation parameters. Earthquake Eng Struct Dyn 10:381–401
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2014 The Society for Experimental Mechanics, Inc.
About this paper
Cite this paper
Lazar, I.F., Neild, S.A., Wagg, D.J. (2014). Design and Performance Analysis of Inerter-Based Vibration Control Systems. In: Catbas, F. (eds) Dynamics of Civil Structures, Volume 4. Conference Proceedings of the Society for Experimental Mechanics Series. Springer, Cham. https://doi.org/10.1007/978-3-319-04546-7_53
Download citation
DOI: https://doi.org/10.1007/978-3-319-04546-7_53
Published:
Publisher Name: Springer, Cham
Print ISBN: 978-3-319-04545-0
Online ISBN: 978-3-319-04546-7
eBook Packages: EngineeringEngineering (R0)