
Abstract
The underlying physics of the flight of birds is still not fully understood, in part due to the very complex wing movement and a lack of appropriate measurement techniques. Modern measurement technologies for fluid flows are often not suited for experiments with living animals, since these techniques may potentially harm the animal (e.g. lasers). The objective of this project was to modify the established technology Particle Image Velocimetry (PIV) to measure the flow around trained barn owls with the least possible hazard to the health of the animals. Furthermore, the shape of the wings was measured simultaneously using Projected Pattern Correlation Technique (PROPAC) to correlate the flow with the shape and movement of the wings. Results of the measurements of gliding and flapping flight are presented in this chapter.
Access provided by Autonomous University of Puebla. Download chapter PDF
Similar content being viewed by others

Keywords
1 Introduction
The study of gliding and particularly flapping flight of birds has a long tradition, but has been disregarded by aviation research for almost a century. With the increasing importance of Micro Air Vehicles (MAV), flapping flight came back into focus as a possibly quieter and more efficient alternative to other existing propulsion systems. However, the flow physics of the flapping flight of animals is still not completely understood. This is due to the complexity of the wing motion together with the three-dimensionality and the unsteadiness of the flow. However, the evolution over millions of years of birds leads to an enhanced flapping flight approach, so that detailed measurements of their biomechanics and the fluid flow around their bodies and wings could help in gaining more knowledge that can be used to develop flapping flight mechanisms for MAVs.
Measurement technology for fluid flows has developed rapidly over the last two decades, leading to a better understanding of transient phenomena in fluid flows. Unfortunately, most of these technologies are not suited for experiments with living animals, since they can potentially harm the animal (e.g. use of lasers). Hence, most of the PIV measurements on birds were focused on the wake behind the bird (Spedding [1, 2], Hedenström [3], Rosen [4]). Flow effects around the wings of birds especially for the flapping flight mode have rarely been explored, even though they potentially play an important role in generating lift and thrust. Measurements on bats [5] and humming birds [6] show that both create leading edge vortices to increase the lift. On larger birds such measurements have not yet been conducted.
Therefore the objective of this project was to develop a measurement setup which is capable of measuring the flow field around owls. For this purpose, the measurement technique PIV needs to be adapted so that it does not harm the animals. In order to correlate the flow field information with the movement and shape of the bird wing, the measurement technique PROPAC was also applied. This technique is used to measure a wing shape in high resolution and in a non-intrusive manner, as described in [7, 8]. Both measurement techniques were applied simultaneously. Therefore the resulting wing shapes can be correlated with the flow field obtained by PIV. The position of the light sheet on the wing as well as the kinematics of the bird movement can also be calculated by combining the methods.
2 Experimental Methods
In contrast to conventional wind tunnel experiments, another approach was applied. The birds were trained to fly a defined flight path. For the measurements the experimental setup was placed around the flight path, so that the birds themselves were able to choose their flight speed and mode (flapping, gliding). Advantages of this setup are the capability of observing manoeuvres, the steady non turbulent air flow and the possibility to measure the wake for a long time. The main disadvantage compared to wind tunnel tests is that the bird only stays within the measurements zone for a short time, which leads also to a short measurement time.
The whole measuring equipment was attached to an aluminium frame (see Fig. 1, right). The flight passage through the frame was about \(1.8\, \times 1.8\,\mathrm{m}\). The frame was placed in the middle of a more than 30 m long and about 5 m wide hall, where the experimental flights were carried out. At the one end of the hall the bird sat on a perch and started its flight through the measurement zone when the trainer on the other side of the hall called it by whistling.

Left Barn Owl; Right Sketch of the setting 1-4 PIV Cameras, (a, b) Led-Illuminator; (c, d) PROPAC Cameras
Two Barn Owls (tyto alba), one male and one female (see Fig. 1, left side) of RWTH Aachen University were used for the experiments. These owls are specially trained birds which had already been used for other flight experiments (see [7, 8]). Therefore the birds were well adapted to these kinds of setups and it was possible to perform the measurements without the need for extensive bird training.
Barn Owls are crepuscular predators, so they are agile and accustomed to low light conditions, which is very helpful due to the sensitivity of the measurement technique to ambient light. With a wing span of around 90 cm and an average chord length of 15 cm, Barn Owls have relatively large wings compared to their weight of 460–530 g. The flight speed in the experiments varied between 4.5 and 7 m/s. The resulting Reynolds number is \(Re \sim \) 60,000 and the reduced frequency \(k \sim \) 0,275 (calculated with an average flapping frequency \(f \sim 3.5\,\mathrm{Hz}\)). For comparison, typical parameters of other species are given by Herzog [9] or Hubbel [10].
2.1 Stereo PIV
PIV is a well-developed technique, which has been refined and improved over the last two decades and already adapted to measurements of many fluid problems and phenomena. For the experiments a Stereo PIV approach was applied. This allows the calculation of three dimensional velocity vectors within the measurement area. A detailed description of the principles, variations and common elements of PIV and Stereo PIV can be found in Adrian [11] and Raffel [12].
The challenge in this project is to make the technology suitable for experiments on freely flying birds without harming the animals. The use of high energy lasers poses the highest hazard to the animal, so that either the light intensity has to be reduced considerably or an alternative non-hazardous light source has to be used. In the present experiments Xenon flashlamps were applied as light source. The advantage of this light source is the harmlessness. Main disadvantages are the non-coherent radiation characteristic, the low light source intensity (when compared with that of a laser) and the light pulse length. The radiation characteristic of the light source, i.e. emitting non-monochromatic light with low spatial coherence, caused a minimum light sheet thickness of 10 mm for the used setup. The pulse length of the applied flash lamps was 30 \(\upmu \)s.
As tracer particles, \(\mathrm{Microsphere}^{\circledR }\) expanded plastic spheres were used. These particles (Expancel DET 80 d25) have a density of \(25\,\mathrm{kg}/\mathrm{m}^{3}\) and a diameter of \(60-90\,\upmu \mathrm{m}\). They are solid particles and have no deleterious effects for the birds; for example, they do not adhere to their feathers. The particles restricted the maximum resolvable flow frequency to \(\sim \)2,000 Hz, but they also have good reflection behaviour. Therefore, together with the applied high-sensitivity cameras (PCO Dimax) a sufficient signal to noise ratio was achieved.
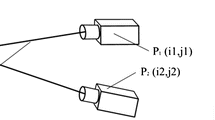
The positioning of the cameras needs to be well thought out. To obtain optimal results of the fluid flow close to the surface of the wing and body, the cameras need to view parallel to the surface, so that the illuminated feathers are not visible and do not disturb the results. But there is also always the risk that parts of wing block the field of view and no results can be obtained. Also the position and shape of the bird flying through the frame varies greatly. Therefore four cameras were positioned on the side of the frame to view with different angles on the light sheet (1–4 in Fig. 1). The images of any two of these cameras could be combined to get stereoscopic results. The results of all camera pairs were merged to one result. The merged measuring field had a size of \(450\,\times 500\,\mathrm{mm}\) and the images had a resolution of \(7\,\mathrm{Pixel}/\mathrm{mm}\).
After the owl crossed the light barrier placed in front of the measurement volume, 100 double images with a frequency of 100 Hz were recorded. The time between the double images was \(\delta t = 1.25\,\mathrm{ms}\). To identify the particle movement, a multipass cross-correlation algorithm from the program PIVView was applied. The adopted interrogation window size was in most cases 48 pixels with an overlap of 16 pixels, leading to a distance between two calculated vectors of 16 Pixel, or \(\sim \!\!2.3\) mm.
2.2 PROPAC
The determination of shape and position of the bird was carried out with the same system as already used for bird wing shape measurements by Wolf et al [8]. The basic principle of the measurement technique is the combination of photogrammetry with cross-correlation algorithms, as used in PIV [11, 12]. By use of the cross-correlation algorithms, corresponding patterns can be identified in the stereo images. After identification of the corresponding image sections, a stereographic reconstruction is used for the calculation of the exact three-dimensional position of the sections. For a unique identification a random distributed dot pattern is projected onto the surface of interest.
Therefore the applied setup consists of image acquisition and projection parts. For image acquisition a two camera setup, consisting of two Phantom v12.1 high-speed cameras (c, d in Fig. 1), was used. Both cameras were positioned above the measurement volume, thus providing an observation of the upper wing surface.
For the optical projection of the dot pattern a specially developed projection device using LED light sources was used. The main feature of this device is the homogenous projection of patterns with high contrast and good depth-of-field. Furthermore, the light source is can be pulsed. with which it was possible to prevent that the PROPAC measurements interfere with the flow measurements; i.e. the light pattern is triggered just after the exposure times of the PIV cameras The exposure of the PROPAC cameras is triggered such that they capture the projected dot pattern and a bright line produced by the light sheet on the wing, so that the position of the PIV plane can be determined on the wing. An example of the resulting wing shape is shown in Fig. 2.
3 Results
In five days of experiments it was possible to record more than 200 flights. Not all of those flights were suitable for analysis, because the owls did not always fly at the optimal position.
Below, the results of some recorded flights are shown and discussed. The collected PIV data is displayed together with the upper wing shape at certain time steps. The position of the light sheet with respect to the wing is also given.
3.1 Gliding Flight
The first case shows gliding flight of a barn owl with a flight speed of 6.3 m/s. The three-dimensional PROPAC result for two time steps and the PIV light sheet are shown in Fig. 2. It can be seen that the wing shape does not change significantly for the displayed time steps, which is a characteristic of gliding flight.

Measured wing shape at two different time steps together with the PIV light sheet
The position of the light sheet and therefore the flow measurement was at 53 % of the wingspan. The result of the fluid flow measurement of the flight is shown in Fig. 3. The vectors in the images represent the velocity of the air in the measurement plane, while the colour represents the out-of-plane velocity normalized to the flight speed. The first image shows the results of flow measurements at 90 ms after entering the measurement volume, where the wing of the owl can also be seen. Around the wing there are indications of a circulation and behind it a strong downwash is visible.

PIV-results of a gliding flight at two time steps (every \(5\mathrm{th}\) vector shown)
The colours in the image show that the out-of-plane velocity increases over the wing continuously, starting from the leading edge, where it is close to zero, to the trailing edge, where it reaches almost 10 % of the flight speed in direction of the body. In the second time step, 130 ms after entering the volume, a thin shear layer has developed between the upper part of the flow with a positive out-of-plane velocity and the lower part with a negative out-of-plane velocity. The in plane velocity field still shows the downwash. While the vectors mainly point downwards, the main direction in the shear layer is in the flight direction, indicating the wake depression caused by the boundary layer of the wing [13].
3.2 Flapping Flight
An example of the shape measurements of a flapping flight is given in Fig. 4. Each of the three images of this figure shows one perspective of the position and shape of the wing at three different time steps. The owl was recorded during an upstroke and a flight speed of 7.1 m/s was calculated. The position of the light sheet was between the middle of the wing and the wing tip.

Results of the geometry measurements during an upstroke at tree time steps
A result of the fluid flow measurement of this flight is shown in Fig. 5 on the left. The shear layer which divides the upper and lower parts of the flow (positive and negative out-of-plane velocities, respectively) can clearly be seen and gives an indication of the path of the wing in the measurement plane. The flow field shows a velocity from the wing tip in a direction towards the body in the area over the shear layer, and vice versa below, similar to the gliding flight results. In Fig. 5 on the right the colour represents the vorticity in y direction. It can be seen that during the upstroke negative vortices develop in the y direction. At the end of the upstroke this changes and positive vortices emerge as shown in Fig. 5 on the right. This indicates that the lift is alternating during the upstroke, leading to the development of start and stop vortices and to a compensation for the change in vorticity around the wing that is according to the wake vortex models of [1] and [14] for flapping flight.

The colourmap in the image on the left shows the out-of-plane velocity, the colourmap in the image on the right show the vorticity (every 5th vector shown)
Another flapping flight case where the bird was recorded during down stroke is shown in Fig. 6. The speed of the owl was only 4.8 m/s during this flight.

PROPAC results during a down stroke at four time steps, \(\varDelta t = 20 \mathrm{ms}\)

Velocity results for two time steps, \(t_{2}\) and \(t_{4}\) (every 5th vector shown)
The obtained velocity fields for the time steps \(t_{2}\) and \(t_{4}\) are shown in Fig. 7. The coordinate system is now fixed to the wing, which means we add the vector of the current wing movement to the measured flow field. The blank area in the wake of the wing without velocity results is caused by a lack of particles. This area is enlarged when the bird beats its wings downward \((t = t_{2})\) and becomes smaller as the bird reaches the end of its down stroke \((t = t_{4})\). One reason for that might be the occurrence of a flow separation.
4 Conclusion and Outlook
The measurement technique PIV was successfully modified for the application to free-flying birds. By the use of flashlamps for the generation of a light sheet, it was possible to build a non-harmful PIV setup which is able to capture the velocity field over the wing of the bird. A suitable seeding technique using solid particles which do not adhere to the bird was also applied. It was proven during the tests that, providing sufficient training time has been given, the influence of the seeding and the setup on the flight behaviour can be neglected. For the current tests, velocity fields for 50 flights were obtained. Within these flights, it was possible to collect data from 2 birds at several positions on the wing and wing beat phases. Together with the PIV measurements a non-intrusive surface measurement system was applied simultaneously, this enabling the correlation of the flow field information with the wing shape and kinematics of the bird flight.
The obtained results show some interesting flow effects particularly for the flapping flight, which occur above the wing and in the wake where a complex vortex system develops and that should be investigated in more detail. For this the seeding generation should be optimized getting higher spatial resolutions. Also tomographic PIV approaches can be applied to gather more information about the three-dimensional, unsteady flow fields.
References
Spedding, G.R., Rosen, M., Hedenström, A.: A family of vortex wakes generated by a thrush nightingale in free flight in a wind tunnel over its entire natural range of flight speeds. J. Exp. Biol. 206(14), 2313–2344 (2003)
Speeding, G.R.: The wake of a kestrel (falco tinnunculus) in gliding flight. J. Exp. Biol. 127, 45–57 (1987)
Hedenström, A., Rosen, M., Spedding, G.R.: Vortex wakes generated by robins Erithacus rubecula during free flight in a wind tunnel. J. Roy. Soc. Interface 3(7), 263–276 (2006)
Rosén, M., Spedding, G.R., Hedenström, A.: Wake structure and wingbeat kinematics of a house-martin Delichon urbica. J. Roy. Soc. Interface 4(15), 659–668 (2007)
Muijres, F.T., Bowlin, M.S., Johansson, C., Hedenström, A.: Vortex wake, downwash distribution, aerodynamic performance and wingbeat kinematics in slow-flying pied flycatchers. J. Roy. Soc. Interface 9 (2012)
Warrick, D.R., Tobalsk, B.W., Powers, D.R.: Lift production in the hovering hummingbird. Proc. Roy. Soc. Bio. Sci. 276(1674), 3747–3752 (2009)
Wolf, T., Konrath, R., Kirmse, T., Erlinghagen, T.: Measuring shape of bird wings during flight. In: 14th International Symposium on Flow Visualization—ISFV14, Daegu, 21–24.06.2010 (2010)
Wolf, T., Konrath, R., Erlinghagen, T., Wagner, H.: Shape and deformation measurement of free flying birds in flapping flight. Notes on Numerical Fluid Mechanics and Multidisciplinary Design, Heidelberg (2012)
Adrian, R.J. Westerweel, J.: Particle Image Velocimetry. Cambridge Aerospace Series. Cambridge University Press, Cambridge (2010)
Raffel, M., Willert, C.E. Kompenhans, J.: Particle Image Velocimetry: A Practical Guide, Experimental Fluid Mechanics. Springer, Berlin (1998)
Schlichting, H. Gersten, K.: Boundary Layer Theory. Springer, Berlin (2000)
Pennycuick, C.: Modelling the Flying Bird. Academic Press, Bristol (2008)
Herzog, K.: Anatomie und Flugbiologie der Vögel. Gustav Fischer Verlag, Stuttgart (1968)
Hubbel, T.: Untersuchungen zur instationären Aerodynamik an einem vogelähnlichen Flügelschlagmodell. Dissertation, Fachbereich Biologie der Technischen Hochschule Darmstadt, Darmstadt (2006)
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2014 Springer International Publishing Switzerland
About this chapter
Cite this chapter
Doster, T., Wolf, T., Konrath, R. (2014). Combined Flow and Shape Measurements of the Flapping Flight of Freely Flying Barn Owls. In: Dillmann, A., Heller, G., Krämer, E., Kreplin, HP., Nitsche, W., Rist, U. (eds) New Results in Numerical and Experimental Fluid Mechanics IX. Notes on Numerical Fluid Mechanics and Multidisciplinary Design, vol 124. Springer, Cham. https://doi.org/10.1007/978-3-319-03158-3_67
Download citation
DOI: https://doi.org/10.1007/978-3-319-03158-3_67
Published:
Publisher Name: Springer, Cham
Print ISBN: 978-3-319-03157-6
Online ISBN: 978-3-319-03158-3
eBook Packages: EngineeringEngineering (R0)