
Abstract
Despite subjecting their scales to constant friction and contact with surfaces, snakes’ skin remains remarkably intact. This resistance to wear and tear is a subject of many researchers’ interest. This chapter’s focus will be on the tribological properties of snake scales, in particular the ventral scales on the underside of the snake, as they are the most critical to movement and display an important characteristic that scientists call frictional anisotropy. Frictional anisotropy can be thought of as directional friction, or varying coefficients of friction based on orientation (Vogel, Slithering snakes: research shows snakes use friction and weight redistribution to glide on flat terrain, http://www.gtresearchnews.gatech.edu/snakes/, 2009). The two general strata that make up snake skin are called the dermis and epidermis. The outermost layer is called the Oberhautchen and is in direct contact with the environment (Abdel-Aal 2011). Frictional anisotropy can in part be attributed to the wide overlapping of the ventral scales on the Oberhautchen layer; these overlaps snag on asperities—or roughness and unevenness—on the surface in the direction of the scale, creating varying coefficients of friction in certain directions (Hu et al., Proc Natl Acad Sci U S A 106(25):10081–10085, 2009). In addition to the overlapping of scales, micro-hairs known as microfibrils and their orientation and upward slope are also responsible for frictional anisotropy (Hazel et al., J Biomech 32(5):477–484, 1999). Snake scales are microscopically adapted to resist wear, which can be seen in the double-ridge design of their microfibrils (Abdel-Aal, J Mech Behav Biomed Mater 22:115–135, 2013). Furthermore, a system of evenly distributed micropits reduces friction forces up to ten times, enhancing wear resistance (Hazel et al., J Biomech 32(5):477–484, 1999). Snake skin, with its natural ability to endure such high levels of abrasion, sliding, and rubbing, is naturally a source of inspiration for researchers aiming to design cylinder-piston systems for internal combustion engines (ICEs) that are textured in a way to optimize efficiency and performance. Plateau honing is one such process that may optimize a cylinder and piston’s sliding performance (Abdel-Aal and El Mansori, Reptilian skin as a biomimetic analogue for the design of deterministic tribosurfaces. In: Gruber P, Bruckner D, Hellmich C, Schmiedmayer H, Stachelberger H, Gebeshuber I (eds) Biomimetics—materials, structures, and processes. Springer, Heidelberg, pp 51–79, 2011).
Particular gratitude to Joseph Park for allowing me to consult his draft on snake skin.
Access provided by Autonomous University of Puebla. Download chapter PDF
Similar content being viewed by others


Keywords
These keywords were added by machine and not by the authors. This process is experimental and the keywords may be updated as the learning algorithm improves.
Slithering with Precision and Agility
Did you know that of all animals, Americans find snakes to be the number one most terrifying creature? According to a recent poll, 21 % of respondents claim to be the most afraid of snakes (Public Policy Polling 2013). While the sight of this scaly creature and its signature smooth glide would most likely cause an onlooker to cringe, it—believe it or not—brings about great joy in others. Scientists have been intrigued for years by the snake’s ability to slither along a remarkable variety of surfaces with precision and agility. Take, for example, Dr. Howie Choset of Carnegie Mellon University and the researchers of his Modular Snake Robot Lab. These ‘Modsnakers’, as they like to call themselves, create robotic snakes (pictured in Fig. 9.1) by modeling the snake’s movements with numerous hinged joints and 16 degrees of freedom.

Robotic snake created at the Modular Snake Robot Lab at Carnegie Mellon University (Reprinted with kind permission from Howie Choset (2010))
By imitating snake movement, the robots are able to travel along non-solid rubble surfaces as well as through tight or windy spaces that conventional robots may not be able to access. According to Carnegie Mellon News, this kind of agility in the snake robots make them ideal for aiding in search and rescue missions. They are particularly useful in scenarios involving radioactive environments, such as power plant facilities. The snake robots have already been sent through the pipes of a nuclear power plant to places that would be difficult, impossible, or hazardous to reach for humans (Spice 2013). As snake movement becomes a subject of increasingly expansive study, it is important to acknowledge one of the prime enablers of such movement: the snakes’ scales themselves.
Frictional Anisostropy
What Is Frictional Anisotropy?
The forward movement of a snake is complex, involving interactions between numerous factors including, but not limited to, weight distribution, its mode of motion, the scales, and the characteristics of the surface it is moving on. As legless creatures, they rely on propelling themselves forwards by transmitting frictional forces to the ground through perfectly coordinated movements (Abdel-Aal and El Mansori 2009). Despite subjecting their scales to constant friction and contact with surfaces, snakes’ skin remains remarkably intact. This resistance to wear and tear is a subject of many researchers’ interest. This chapter’s focus will be on the tribological properties of snake scales, in particular the ventral scales on the underside of the snake, as they are the most critical to movement and display an important characteristic that scientists call frictional anisotropy.
Frictional anisotropy can be thought of as directional friction, or varying coefficients of friction based on orientation. In an article published by Georgia Tech, it was described as the “resistance to sliding in certain directions” (Vogel 2009). Frictional anisotropy can be found in a plethora of natural and artificial systems, ranging from burr-covered plant leaves and global plate tectonics to the textures and structures of certain solids at the molecular level. In snakes, frictional anisotropy is considered to be a result of preferred orientation of the micro-scale surface structures in addition to the scales themselves (Filippov and Gorb 2013). Frictional anisotropy plays a critical role in snake motion and the mechanics of its propulsion.
Two Reasons for Frictional Anisotropy of Snake Skin
The two general strata that make up snake skin are called the dermis and the epidermis. While the dermis consists of connective tissue and lies under the epidermis, the epidermis consists of seven layers and acts as an outer shield for the snake’s body. As shown in Fig. 9.2, the top layer is called the Oberhautchen; it is composed of keratinized dead skin cells and is the toughest layer. Under the current epidermis, a snake develops a new epidermal layer that is attached to the original by a spinulae structure. Then, a widely known process called ‘molting’ occurs, where the snake sheds four layers of the older, outermost epidermal layer, which consist of the proteinaceous inner α–layer, the mesos layer rich in lipids, the proteinaceous β–layer, and the Oberhautchen layer (Abdel-Aal 2013).

Generalized epidermis of snake skin divided into the layer about to be shed (outer generation layer) and the layer to replace shed layer (inner generation layer) (Reprinted from Abdel-Aal and El Mansori (2011), Fig. 4.2. With kind permission from Springer Science + Business Media)
As the outermost layer, the Oberhautchen is in direct contact with the environment, thus receiving direct wear and tear from the surfaces treaded by the snake. This layer contains hexagonal ventral scales of varying sizes connected by flexible skin (Abdel-Aal and El Mansori 2011). The hexagonal pattern of the snake’s ventral scales, however, is not enough to explain the frictional anisotropy of the snake’s surface; instead, this directional friction can in part be attributed to the wide overlapping of the ventral scales (Fig. 9.3).

Snake scales (Reprinted with kind permission from Lucy Browne (2012))
According to a study completed by Hu et al., these overlaps snag on asperities—or roughness and unevenness—on the surface in the direction of the scale, creating varying coefficients of friction in certain directions. It was found that the static coefficient of friction, μ, when the snake moved in the forward direction was generally lower than that of the snake when it moved backwards. Based on the resulting values of μ, which was the highest moving flank-wise at μt = 0.20 ± 0.015, intermediate towards the tail at μb = 0.14 ± 0.015, and lowest sliding forward at μf = 0.11 ± 0.011, Hu et al. concluded that the snake had preferred directions for sliding given certain surface characteristics (e.g. roughness level). The role of asperities in the frictional anisotropy that snakes experience while sliding was confirmed when the researchers evaluated coefficients for an entirely smooth surface. With almost no asperities available for snagging, the coefficient of friction moving flank-wise was about μt ≈ 0.16, while the coefficients of friction moving forwards and backwards were about μf≈μb ≈ 0.14, showing no significant directional preference (Hu et al. 2009).
In addition to the overlapping of scales, micro-hairs known as microfibrils found on the snake’s scales are also responsible for frictional anisotropy. The microfibrils, which measure about 30–100 nm in height and 100–400 nm in diameter, are regularly arranged, creating either row-like patterns or triangular arrays, and they are all oriented in the sliding direction with tips elevated and pointing toward the tail. In fact, the upward slope of the microfibrils causes their tips to be almost three to four times more elevated than the cross-sectional heights (Hazel et al. 1999). As shown in the Fig. 9.4 in which snake skin is subject to ×5,000 magnification, boundaries between scales consist of flexible, soft tissue (left), and while the scales show microfibrillar texture (right). Fibrillar arrays differ in shape and spacing based on the region of the snake. Note the uniform direction of the microfibrils (Abdel-Aal and El Mansori 2011).

Scanning electron microscopy (SEM) images reveal marked differences in boundary and membrane features: (a, b) show ventral scale boundaries and membrane, (c, d) show dorsal scale light boundaries and membrane, and (e, f) show dorsal scale dark boundaries and membrane. Scale: 5 μm; magnification: ×5,000 (Reprinted from Abdel-Aal and El Mansori (2011), Fig. 4.9. With kind permission from Springer Science + Business Media)
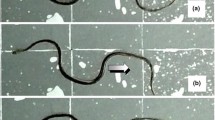
The orientation of these microfibrils and their significant upward slope incur friction force spikes that indicate frictional anisotropy. When atomic force microscopy (AFM) tips were dragged across the microfibrils of snake scales, Hazel et al. found that the friction force values differed greatly depending on the direction. Dragging the AFM tip in the reverse direction—indicated by the white arrow in Fig. 9.5b—incurred a friction force spike four to six times greater than when the tip was dragged in the same direction as the microfibrils—indicated by the white arrow in Fig. 9.5a. Figure 9.5c, d display the contrast between the friction force spikes resulting from the two cases, confirming the microfibrillar texture and orientation as causes for the frictional anisotropy of snake scales (Hazel et al. 1999).

4×4 μm friction images with arbitrary Z-range in which brighter denotes higher friction signal: (a, c) shows tip moving forward from left to right and the corresponding friction signal, while (b, d) shows tip moving backward from right to left and the corresponding friction signal (Reprinted from Hazel et al. (1999). With permission from Elsevier)
Remarkable Wear Resistance
Varying Load Bearing Capacities
Another interesting attribute of snake skin is its ability to resist wear despite being constantly subjected to contact with surfaces, even in particularly tribologically hostile environments (Abdel-Aal and El Mansori 2011). Like frictional anisotropy, the snake’s exceptional resistance to wear is also due to both macro- and micro-level causes.
On the macro-level, observations of the overall scheme of ventral scale placement through the length of the snake have revealed non-uniformity. Because most of the snake’s mass is concentrated in the trunk of the body and the head and tail are relatively skinny and light, in their research of the Ball python, Abdel-Aal and El Mansori found that the skin of the snake has adapted accordingly. Because the trunk is the heaviest and most used part of the body in terms of traction and rubbing during motion, it is expected to reflect the bulk of the reaction forces that the snake experiences in sliding.
Quantitative measurements of load bearing capacity were obtained by producing an Abbott-Firestone Load Curve (AFLC) of scale samples taken from three regions. The purpose of the AFLC is to obtain a particular surface’s behavior and potential for damage due to wear when sliding. This is done by integrating the probability density distribution of the surface profile with respect to surface height.
Curve 1 in Fig. 9.6 corresponds to ventral scales taken from the trunk portion, curve 2 to those taken from the neck-trunk area, and curve 3 to those taken from the tail end. The plot of the resulting AFLC in Fig. 9.6 reveals a similar load bearing capacity for ventral scale samples from the throat-neck and tail sections, while the capacity for scales taken from the trunk is exceptionally high. It is no wonder, then, that the snake is able to withstand much exposure to rubbing and traction without significant wear. It seems as though it was designed by nature to have higher load bearing capacity in precisely the area that would receive the most loading. Thus, the probability of sustaining severe topographical damage from this type of loading is unlikely, as the areas with the highest load are associated with the scales that are naturally most able to handle it (Abdel-Aal and El Mansori 2011).

Abbott-Firestone Load Curve (AFLC) of scale samples taken in regions as follows: middle trunk (1), neck-trunk (2), and tail (3) (Reprinted from Abdel-Aal and El Mansori (2011), Fig. 4.13. With kind permission from Springer Science + Business Media)
Double-Ridge Design of Microfibrils
In addition to placement along the body, snake scales are also microscopically adapted to resist wear. The previously mentioned microfibrils feature a double-ridge design that not only provides ideal conditions for sliding in the forward direction with minimum friction and adhesive force, but it also helps to effectively stop the snake’s motion in the opposite direction. The double ridges run along the edges of the microfibrils and are of nano-scale geometry, measuring 3–5 nm in height. Using an atomic force microscopy (AFM) tip with a radius of 20–40 nm, Hazel et al. found the radius of curvature of the ridged ends of the microfibrils to be around 30–50 nm.
Though tiny in geometry, the ridges enhance snakes’ sliding abilities by reducing friction and adhesive forces through minimizing contact area. According to Amontons’ law of friction, the real contact area between two bodies is proportional to the amount of friction generated at the interface. It then follows that decreasing real contact area would decrease frictional forces developed (Abdel-Aal 2013). The geometry of the ridges represent sphere-sphere contact as opposed to the original flat surface-sphere contact, and according to the Hertzian theory of elastic mechanical contact, the contact area in sphere-sphere contact is half that of flat surface-sphere contact given the same radii of curvature. Therefore, the existence of the ridges halves the amount of adhesive forces and friction at play (Hazel et al. 1999). Though friction is necessary for traction in movement—as mentioned earlier, snakes can utilize friction to propel themselves forward—friction should generally be minimized, as it opposes movement (Abdel-Aal 2013).
Reduction of Friction Due to Micropits
Snake skin also features a system of evenly distributed micropits (see Fig. 9.7 top). These micropits range in size, measuring about 30–50 nm across, as well as concentration. Depending on the specific type of snake skin, micropits can be found in populations of 5–20 pits per square micrometer. After performing a micropermeability test on the micropits, Hazel et al. were able to verify that they were actually pores through which fluid can permeate. The micropermeability test consisted of placing skin on top of viscous liquid and curing the result with slow-cure cyano acrylate glue. This process resulted in the confirmation of their hypothesis: almost every micropit was replaced with a small, hard bump, as seen in Fig. 9.7 bottom, which meant that the viscous liquid permeated through the pore and hardened at the top (Hazel et al. 1999).

Top: Micropit 3D topography of ball python skin (Z-range: 1 μm). Bottom: Hardened microdrops of viscous fluid after permeating through pore and curing (Z-range: 1 μm) (Reprinted from Hazel et al. (1999). With permission from Elsevier)
These pores are present on dorsal scales of all snakes, indicating that they have a purpose common and critical to every species. Chiasson et al. suggest that the pores are the sole outlets for the secretion of epidermal lipids that act as the primary permeability barrier. They observed such a mechanism at play on the skin surface of Nerodia erythrogaster, where the esters of three fatty acids were found extruded through the pores (Chiasson et al. 1989). In addition to allowing the transmission of epidermal lipids that regulate permeability and wettability, the micropits are speculated to transmit lubricant to the surface of the skin in contact, thereby creating a boundary layer of organized molecular films and reducing friction forces up to ten times (Hazel et al. 1999).
Engineering Applications
Frictional Loss in Internal Combustion Engines (ICEs)
Due to snake skin’s superior damage resistance, it has been identified as a potential analogue for the design of certain tribosystems. Applying the design features of snake skin to lubricating surfaces such as plateau honed surfaces is of particular interest to researchers, because the surface of snake skin is insightful for controlling wear and friction, as it has been shown in this chapter. Minimizing energy consumption, wear, and friction in the design of tribosystems is of great importance, especially since it has become a priority for engineers to reduce fossil fuel consumption (Abdel-Aal and El Mansori 2011).
Decreasing the energy consumption of internal combustion engines (ICEs) has been considered one of the main ways to achieve reduction in fossil fuel consumption. Given the large amount of energy consumed by friction—about 15 % of energy put into a vehicle is lost due to friction—reducing frictional energy loss can account for a significant portion of fuel savings (Priest and Taylor 2000). In ICEs, friction is generated from contact between metals or hydrodynamic stresses in metal and oil films, and it poses a particular problem between the cylinder and piston. With ICEs powering above 200 million vehicles in just the United States, more than a million barrels a day of crude oil is wasted on frictional loss.
The problem of friction between the cylinder and piston has much in common with the friction and wear demands on snake skin; that is, both systems are subject to large amounts of rubbing. Snake skin, with its natural ability to endure such high levels of abrasion, sliding, and rubbing, is naturally a source of inspiration for researchers aiming to design cylinder-piston systems for ICEs that are textured in a way to optimize efficiency and performance (Abdel-Aal and El Mansori 2011).
Plateau Honing and Snake Skin
Plateau honing is one such process that may optimize a cylinder and piston’s sliding performance. Plateau honed surfaces are characterized by plateaus and grooves; plateaus are raised protrusions, while grooves are the valleys between the protrusions. In theory, this texture is supposed to reduce contact area between the metals of the piston and cylinder, thereby reducing contact friction, as well as retaining lubrication in the grooves for future replenishment. Snake skin has been observed to be a large-scale version of a plateau honed surface. In the snake’s case, the hexagonal scales are the plateaus, and the soft tissue between the scales as boundaries are the grooves.
Though connectedness of surface texture is a major factor in lubrication quality and efficient use of lubrication, there has yet to be created a set of standardized values of such parameters for producing optimal performance of honed cylinders. The level of connectedness determines smoothness of oil flow and ensures retention of lubrication for smooth metal-to-metal sliding. Studies by Abdel-Aal and El Mansori of the geometry of the honed surface of snake skin at multiple scales have provided significant insight into a range of proportions that would ensure high-quality performance of the surface. After comparing Python skin with a plateau honed cylinder surface, Abdel-aal and El Mansori observed perfect connectedness of the grooves in Python skin and minimal variation of the geometrical proportions of the surface, confirming snake skin as a natural inspiration for honed surfaces capable of reducing fuel consumption (Abdel-Aal and El Mansori 2011).
Though snakes may be the number one feared animal in America, there is no doubt that they offer much more to us than just a scare. Possessing skin with remarkable wear resistance and fascinating microtopography, snakes have become a primary source of inspiration for applications in internal combustion engines and plateau honing. As engineers continue to explore snake skin further, we may be able to achieve optimization of efficiency and performance of select tribosystems at a level never reached before.
References
Abdel-Aal HA (2013) On surface structure and friction regulation in reptilian limbless locomotion. J Mech Behav Biomed Mater 22:115–135. doi:10.1016/j.jmbbm.2012.09.014
Abdel-Aal HA, El Mansori M (2009) Characterization of the frictional response of squamata shed skin in comparison to human skin. Paper presented at the 36th Leeds-Lyon symposium on tribology, Lyon, Sept 2009
Abdel-Aal HA, El Mansori M (2011) Reptilian skin as a biomimetic analogue for the design of deterministic tribosurfaces. In: Gruber P, Bruckner D, Hellmich C, Schmiedmayer H, Stachelberger H, Gebeshuber I (eds) Biomimetics—materials, structures, and processes. Springer, Heidelberg, pp 51–79. doi:10.1007/978-3-642-11934-7_4
Browne L (2012) Smooth snake scales. http://theforagingphotographer.wordpress.com/2012/09/18/smooth-snake-scales/. Accessed 4 Nov 2012
Chiasson RB, Bentley DL, Lowe CH (1989) Scale morphology in Agkistrodon and closely related crotaline genera. Herpetologica 45(4):430–438
Choset H (2010) Modular snake robots. http://biorobotics.ri.cmu.edu/projects/modsnake/index.html. Accessed 27 June 2013
Filippov A, Gorb SN (2013) Frictional-anisotropy-based systems in biology: structural diversity and numerical model. Sci Rep. doi:10.1038/srep01240
Hazel J, Stone M, Grace MS, Tsukruk VV (1999) Nanoscale design of snake skin for reptation locomotions via friction anisotropy. J Biomech 32(5):477–484. doi:10.1016/S0021-9290(99)00013-5
Hu DL, Nirody J, Scott T, Shelley MJ (2009) The mechanics of slithering locomotion. Proc Natl Acad Sci U S A 106(25):10081–10085. doi:10.1073/pnas.0812533106
Priest M, Taylor CM (2000) Automobile engine tribology—approaching the surface. Wear 241:193–203. doi:10.1016/S0043-1648(00)00375-6
Public Policy Polling (2013) Animals and pets poll: Americans prefer dogs; fear snakes. http://www.publicpolicypolling.com/main/2013/06/animals-and-pets-poll-american-prefer-dogs-fear-snakes.html. Accessed 29 Sept 2013
Spice B (2013) Carnegie Mellon snake robot winds its way through pipes, vessels of nuclear power plant. http://www.cmu.edu/news/stories/archives/2013/july/july9_snakerobot.html. Accessed 11 July 2013
Vogel A (2009) Slithering snakes: research shows snakes use friction and weight redistribution to glide on flat terrain. http://www.gtresearchnews.gatech.edu/snakes/. Accessed 11 July 2013
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2014 Springer International Publishing Switzerland
About this chapter
Cite this chapter
Lee, M. (2014). Snake Skin: Small Scales with a Large Scale Impact. In: Lee, M. (eds) Remarkable Natural Material Surfaces and Their Engineering Potential. Springer, Cham. https://doi.org/10.1007/978-3-319-03125-5_9
Download citation
DOI: https://doi.org/10.1007/978-3-319-03125-5_9
Published:
Publisher Name: Springer, Cham
Print ISBN: 978-3-319-03124-8
Online ISBN: 978-3-319-03125-5
eBook Packages: Chemistry and Materials ScienceChemistry and Material Science (R0)