
Abstract
The motion of an acoustic source produces a Doppler shift of the source frequency which is dependent on the source’s motion relative to the receiver. Some applications in acoustics involve rotating sound sources around a fixed axis in space. For example, the noise emitted by fans is of interest and because of the fast rotation, the sound sources are not easy to locate with the standard delay-and-sum beamforming code. In the time domain approach for stationary sound sources, the delay-and-sum beamforming works with shifting the microphone signals due to their different delays caused by the different distances between the source and the microphones and summing them up. This approach is adapted to a moving source, resulting in time dependent delays. The delays are calculated via an advanced time approach where the time at the receiver is calculated from the emission time τ plus a time dependent delay due to the time dependent distance r(τ). In contrast to the standard beamforming code, this time domain beamforming code allows to treat rotating sound sources as well as stationary sound sources. In this chapter the differences between the standard delay-and-sum beamforming to the rotating time domain beamforming is shown and examples are presented.
Access provided by Autonomous University of Puebla. Download chapter PDF
Similar content being viewed by others


Keywords
1 Introduction
The sound emitted by moving sound sources such as a flowed airfoil or rotating fan blades are problems of technical interest. Visualising and analysing moving sound sources is much harder in comparison to stationary sound sources. The Doppler-shift and the retarded time due to the movement of the sound source have to be taken into account. In this work a time domain algorithm is presented which can be applied to rotating sound sources which are produced for example by fan blades. The theory is shown and the algorithm is proved with measurements using an acoustic camera at a rotating fan.
The standard Delay-and-Sum beamforming method can be applied in time and frequency domain [1]. However, the method is not suitable for moving sound sources. To compensate the movement of the sound source, special corrections are necessary. For this case the rotation of fans have to be compensated. The pressure field of a moving monopole is derived for a uniform flow in this approach. The approach presented below is original based on [2] and is based on the Delay-and-Sum, beamforming method in the time domain. A method to compensate rotating sound sources in the frequency domain, especially for high resolution beamforming techniques [3], is presented by Pannert [4].
2 Theory
The movement of a point source can be treated with the Greens function approach for solving the inhomogeneous wave equation.
Taking the inhomogeneous wave equation for a stationary source located at \( \vec {x} \)
where \( q(\vec{x},t) \) is a the source distribution, the solution for free space conditions without boundaries for p′ can be calculated from an integral formulation
with
and the retarded time τ
The signal which was emitted at time τ at a position \( \vec {y} \) and is observed at time t at the point \( \vec {x} \). For the general source distribution a concrete source distribution can be inserted. The simplest model for a moving monopole is the distribution
With \( \vec {{x_{s} }} \left( t \right) \) as the actual time dependent position and Q(t) as the amplitude of the monopole sound source.
Figure 1 shows the situation for a moving sound source and a fixed observer position. The observer point is the microphone position (at the microphone array).

Movement of the source term to a fix observation point
It is necessary to calculate the distance between sound source and the microphone position for every time step τ n to calculate the time delay to the observer position [5, 6].
In the retarded time approach, the retarded emission time τ is calculated back from the receiving time t via
and cannot be calculated analytically in general cases due to the complicated dependence of r(τ) from τ. It can numerically found as a root of Eq. (7) [6]. Algorithms that treat that problem can be found in [7] or [8].
In the advanced time approach which is applied in this work, the receiver time t can be calculated via
This is much easier, but results in unequally spaced time samples t n when using equally spaced time samples τ n .
In Fig. 2 the situation is shown for a moving source. An emitted signal at the time τ arrives at the observer position \( \vec {x} \) at the time t. The speed of sound is c. In the case of a stationary source, the retarded time only depends on the position of the source \( \vec {{x_{s} }} \). In the case of a moving source it depends on \( \vec {{x_{s} }} (\tau ) \). This time delay is calculated for every time step n

Retarded time emitted from a moving sound source in the space–time
The condition \( \tau_{n} < t_{n}\) is always fulfilled for the case that the source term moves with subsonic speed and \( \Delta t_{n} (\tau_{n} ) \) is always positive. Working with these time delays the motion of the source can be compensated in the received microphone signals and the moving source is imaged at a fixed position which corresponds to the position at time τ = 0.
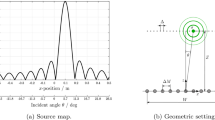
In Fig. 3, the typical set up for investigating a fan with an acoustic camera is shown. It is necessary to compensate the movement of the sound source. To compensate this movement, in this case the rotation of the fan with its blades, it is necessary to shift the time signals of every microphone for every time step at an amount, which is due to the change in distance between the moving source and the selected microphone. These shifted signals are used then to calculate the beam pattern.

Microphone array with moving sound source in front of it
In Fig. 4 simulated signals for a rotating source are shown. The pressure signal shows clearly the varying frequency due to the Doppler shift (Fig. 4a). The radial motion of the source is subsonic Fig. 4b shows the spectrum of the microphone signal in (a). The radius at which the sound source rotates is 0.65 m and the frequency of rotation is 100 Hz.

Received signal from a rotating source. Distance microphone—plane of rotation in distance D = 1 m; rotation speed n = 6000/min; frequency of the source f = 1500 Hz. a shows the microphone signal and b the spectrum of the pressure signal
The frequency spectrum (Fig. 4b) shows the peak no longer at the position of 1500 Hz. This is the effect due to the Doppler shift; the peak is now shifted in positive and negative frequency away from the emitted 1500 Hz. Moreover, this frequency spectrum is not symmetric, because the motion between the source and the receiver also has an influence to the amplitude of the signal.
3 Measurements
Software tests with a rotating sound source were carried out to proof the programmed algorithm. This software code treats the rotating beamforming theory explained in the last section. For this tests an artificial rotating sound source was simulated in software, that rotates with 600 rpm on a circle with a radius of 0.3 m around the position x = 0.2 m and y = 0.0 m out of the middle. The distance between the sound source and the virtual microphone array is D = 1 m. In Fig. 5a the rotating monopole can be seen at the middle frequency 2500 Hz at the position x = 0.4 m and y = 0.0 m for a simulation time of 0 s. Figure 5b shows the same monopole sound source after 0.025 s at the position x = 0.2 m and y = 0.2 m. The monopole sound source rotates over the time and can be captured to every desired point of time.

Virtual software sound source rotating anticlockwise around x = 0.2 m and y = 0.0 m, a at time 0 s and b at time 0.025 s
4 Results
The algorithm used for the validation is implemented in the acoustic camera. So the analysis can be done and it is possible to compare it to the standard delay-and-sum beamforming. The Delay-and Sum beamforming only locates stationary sound sources and rotating beamforming locates moving sound sources. It also shows a ring shaped distribution of sound sources in the gap between the blades and the wall whereas the rotating beamforming shows the spot shaped sound sources on the blades (Fig. 6).

Analysis of a fan with no rotation compensation. Only the stationary sound sources from the gap between blades and wall are visible
Figure 7 shows similar beamforming results like Fig. 6, but with the rotation compensation. Opposite to the beamforming version without rotation compensation stationary sound sources should be averaged out whereas the rotating sources are visible and, in this case, they belong to the sound emitted by the blades itself. Beside this the acoustical photo is superimposed with a frozen-image to match the sound sources to the blades of the fan.

Analysis with motion compensation. After an alignment of the static optical picture the moving sources at the blade tips are visible. a shows the Beamforming plot for 2 kHz and b the beamforming plot for 4 kHz
5 Conclusion
The rotating beamforming algorithm is possible to image the stationary sound sources as well as rotating sound sources. In combination with an acoustic camera it is a helpful tool for optimising fan geometries to reduce sound emission.
Moreover, with this algorithm it is possible to locate sound sources at their position on the blades. So it is possible to distinguish between the leading edge and the trailing edge of the blade and study the frequency dependence of the generated noise.
References
Christensen, J.J., Hald, J.: Technical Review No.1 2004—Beamforming. Brüel & Kjær Sound &Vibration Measurement A/S. http://www.bksv.com/doc/bv0056.pdf (2004). Accessed 20 Dec 2012
Sijtsma, P., Oerlemans, S., Holthusen, H.: Location of Rotating Sources by Phased Array Measurements. National Aerospace Laboratory, Amsterdam (2001)
Brooks, T.F., Humphreys, W.M.: A Deconvolution Approach for the Mapping of Acoustic Sources (DAMAS) determined from phased microphone arrays. 10th AIAA/CEAS aeroacoustics conference (2004)
Pannert, W.: Rotating beamforming—motion-compensation in the frequency domain and application of High-resolution beamforming algorithms. Report University of Applied Sciences Aalen (to be published in Journal of Sound and vibration in 2013)
Ehrenfried, K.: Skript zur Vorlesung Strömungsakustik (Script to the teaching lesson Fundamentals of Aeroacoustics). Mensch & Buch Verlag. http://vento.pi.tu-berlin.de/STROEMUNGSAKUSTIK/SCRIPT/nmain.pdf (2004). Accessed 20 Dec 2012
Brentner, K.S.: Numerical algorithms for acoustic integrals—the devil is in the details. 2nd AIAA/CEAS Aeroacoustics Conference (17th AIAA Aeroacoustics) http://citeseerx.ist.psu.edu/viewdoc/summary?doi=10.1.1.45.6510 (1996). Accessed 20 Dec 2012
Brentner, K.S., Holland, P C.: An efficient and robust method for computing quadrupole noise. 2nd international aeromechanics specialists. http://www.ingentaconnect.com/content/ahs/jahs/1997/00000042/00000002/art00007 (1995). Accessed 20 Dec 2012
Advanced Rotorcraft Technology, Inc.: Kirchhoff code—a Versatile CAA Tool. NASA SBIR phase I final report, contract NAS1-20366 (1995)
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2015 Springer International Publishing Switzerland
About this chapter
Cite this chapter
Maier, C., Pannert, W., Waidmann, W. (2015). Localization of Rotating Sound Sources Using Time Domain Beamforming Code. In: Shaari, K., Awang, M. (eds) Engineering Applications of Computational Fluid Dynamics. Advanced Structured Materials, vol 44. Springer, Cham. https://doi.org/10.1007/978-3-319-02836-1_4
Download citation
DOI: https://doi.org/10.1007/978-3-319-02836-1_4
Published:
Publisher Name: Springer, Cham
Print ISBN: 978-3-319-02835-4
Online ISBN: 978-3-319-02836-1
eBook Packages: EngineeringEngineering (R0)