
Abstract
Recent research studies on the application of the nonlocal continuum theory in modeling of carbon nanotubes and graphene sheets are reviewed, and substantial nonlocal continuum models proposed for static and dynamic analyses of the nano-materials are introduced. The superiority of the nonlocal continuum theory to its local counterpart, and the necessity of calibration of the small-scale parameter as the key parameter revealing small-scale effects are discussed. The nonlocal beam, plate, and shell models are briefly presented and potential areas for future research are recommended. It is intended to provide an introduction to the development of the nonlocal continuum theory in modeling the nano-materials, survey the different nonlocal continuum models, and motivate further applications of the nonlocal continuum theory to nano-material modeling.
Access provided by Autonomous University of Puebla. Download chapter PDF
Similar content being viewed by others

Keywords
1 Introduction
Nanoscience and nanotechnology have opened a new area of research in many fields of science and technology such as materials science, engineering, medicine, biomaterials and energy production. Among different nano-materials, carbon nanotubes (CNTs) (Iijima 1991) and graphene sheets (GSs) (Novoselov et al. 2004) are of great potential applications due to their unparallel mechanical, electronic and thermal properties. The superior properties make the two nano-materials instrumental for developing and innovating new nanodevices in a wide range of applications including gas detection, graphene transistors, solar cells, ultra-capacitors, diagnosis devices and ultra-strength composite materials (Wagner et al. 1998; Thostenson et al. 2001; Qian et al. 2002; Sirtori 2002; Antonelli et al. 2002; Brauns et al. 2002; Lau K-t and Hui 2006; Stankovich et al. 2006; Bunch et al. 2007; Schedin et al. 2007; Chiu et al. 2008).
In addition to formidable experimental methods (Chaste et al. 2012; Falvo et al. 1997), there are three main approaches for theoretically modeling of the nano-materials: (a) atomistic modeling, (b) hybrid atomistic-continuum mechanics and (c) continuum mechanics. Atomic modeling includes techniques such as classical molecular dynamics (MD), tight-binding molecular dynamics (TBMD) and the density functional theory (DFT) (Hernández et al. 1998; Iijima et al. 1996; Sánchez-Portal et al. 1999; Yakobson et al. 1997; Li and Chou 2006; Liew et al. 2004). Hybrid atomistic-continuum mechanics allows one to directly incorporate interatomic potential into the continuum analysis by equating the molecular potential energy of a nano-structured material with the mechanical strain energy of a continuum model (Bodily CTS 2003; Li and Chou 2003a, b). Continuum mechanics includes classical (or local) beam, plate and shell theories that are practical for analyzing nanostructures at large scale sizes (Yakobson et al. 1996; Krishnan et al. 1998; Parnes and Chiskis 2002). Continuum mechanics approach is less computationally expensive than the former two approaches and their formulations are relatively simple. These advantages make continuum modeling as an alternative way to simulate some phenomena in nanostructures such as buckling (Duan et al. 2010; Wang et al. 2005), wave propagation (Liew and Wang 2007; Wang and Varadan 2006a, b) and free vibration (Kitipornchai et al. 2005; Sun and Liu 2007; Behfar and Naghdabadi 2005; He et al. 2005; Liew et al. 2006). Since the continuum mechanics theory is based on the continuous assumption in modeling, verification of results obtained from the theory with those of molecular dynamics simulations or experiments are indispensable.
Based on classical or local continuum theory, CNTs and GSs are modeled as continuous and homogenous macrostructures, while the lattice spacing between individual carbon atoms in the nano-materials is ignored. In local continuum models, the stress at a given point is defined as the function of the strain at that point. Despite the research efforts have been conducted on the basis of classical or local continuum theory, their applicability at very small scales is questionable. The limited applicability is due to the fact that at nanoscale sizes the lattice spacing between individual atoms becomes increasingly important and the discrete structure of the nano-materials can no longer be homogenized into a continuum (Peddieson et al. 2003; Sudak 2003; Zhang et al. 2004; Wang 2005; Ansari and Arash 2013; Gibson et al. 2007). Therefore, the application of continuum mechanics by considering the size dependence in nano-materials became another topic of major concern that led to the application of nonlocal continuum mechanics, allowing for taking into account of the small-scale effects in analysis of nano-materials.
On the basis of the nonlocal continuum theory developed by Eringen (1976, 1983) the stress state at a given reference point is a function of the strain field at every point in the body. The assumption enables the theory to account for information about the long range forces between atoms and the scale effect. Peddieson et al. (2003) showed that nonlocal continuum mechanics could be employed in nanotechnology applications. Wang (2005) indicated that nonlocal elasticity theory should be used for an accurate prediction of wave propagation in CNTs, and estimated a range of the small-scale parameter. Applications of nonlocal continuum mechanics have been also investigated by many researchers in topics of static (Sudak 2003; Wang and Liew 2007; Yang et al. 2008; Wang et al. 2006a, b,c; Murmu and Pradhan 2009a, b, c, d; Zhang et al. 2004, 2006, 2009a, b, 2010; Xie et al. 2006; Shen 2010a, b; Li and Kardomateas 2007; Yan et al. 2010; Amara et al. 2010; Hao et al. 2010; Mohammadimehr et al. 2010; Khademolhosseini et al. 2010; Shen and Zhang 2010; Pradhan 2009; Pradhan and Murmu 2009, 2010, 2011) and dynamic analysis (Zhang et al. 2005; Wang and Varadan 2006a, b; Wang et al. 2007; Aydogdu 2009; Filiz and Aydogdu 2010; Murmu and Adhikari 2010; Yang et al. 2010; Duan et al. 2007; Arash and Ansari 2010; Li and Kardomateas 2007; Murmu and Pradhan 2009a, b, c, d; Lee and Chang 2009; Wang 2009; Pradhan and Murmu 2010; Kiani and Mehri 2010; Kiani 2010; Zhen and Fang 2010; Soltani et al. 2010; Şimşek 2010; Lee et al. 2010; Aydogdu and Filiz 2011; Wang and Hu 2005; Wang and Varadan 2007; Hu et al. 2008; Narendar and Gopalakrishnan 2009; Heireche et al. 2008; Song et al. 2010; Pradhan and Phadikar 2009; Murmu and Pradhan 2009a, b, c, d; Pradhan and Kumar 2010, 2011a, b; Shen et al. 2010; Ansari et al. 2010a, b, 2011; Arash and Wang 2011; Arash et al. 2012).
According to the aforementioned studies on the basis of Eringen’s nonlocal elasticity theory, a consensus has been reached that the refined nonlocal models are superior to their local counterparts. However, since the theory also belongs to the category of continuum mechanics, verification of nonlocal continuum models is essential to identify the magnitude of the small-scale parameter, \( e_{0} a, \) which is the key in revealing scale effect in models.
After the nonlocal elastic theory was introduced, many studies started applying the theory in modeling of CNTs and GSs. The static analysis (Sudak 2003; Zhang et al. 2004, 2006, 2009a, b, 2010; Wang and Liew 2007; Yang et al. 2008; Wang et al. 2006a, b, c; Murmu and Pradhan2009a, b, c, d; Xie et al. 2006; Shen 2010a, b; Li and Kardomateas 2007; Yan et al. 2010; Amara et al. 2010; Wang et al. 2010a, b, c; Hao et al. 2010; Mohammadimehr et al. 2010; Khademolhosseini et al. 2010; Shen and Zhang 2010; Murmu and Pradhan 2009a, b, c, d; Pradhan 2009; Pradhan and Murmu 2009; 2010, Pradhan and Kumar 2011a, b), free vibration (Zhang et al. 2005, 2009a, b; Wang and Varadan 2006; Wang et al. 2007; Aydogdu 2009; Filiz and Aydogdu 2010; Murmu and Adhikari 2010; Yang et al. 2010; Duan et al. 2007; Arash and Ansari 2010; Li and Kardomateas 2007; Murmu and Pradhan 2009a, b, c, d; Lee and Chang 2009; Wang 2009; Pradhan and Murmu 2010; Kiani and Mehri 2010; Kiani 2010; Zhen and Fang 2010; Soltani et al. 2010; Şimşek 2010; Lee et al. 2010; Aydogdu and Filiz 2011; Pradhan and Phadikar 2009; Pradhan and Kumar 2010, 2011a, b; Ansari et al. 2010a, b, 2011; Shen et al. 2010; Arash and Wang 2011) of and wave propagation (Wang 2005; Wang and Hu 2005; Wang et al. 2006a, b, c, 2010a, b, c; Wang and Varadan 2007; Hu et al. 2008; Narendar and Gopalakrishnan 2009; Heireche et al. 2008; Song et al. 2010; Arash et al. 2012) in the nano-materials were widely studied and the continuum models were reformulated based on the nonlocal continuum theory. This paper aims to provide a brief review on enormous studies invested on the application of nonlocal elastic models in modeling of CNTs and GSs to (1) present a summary of the state-of-the-art findings (2) introduce major challenges in the modeling based on the nonlocal continuum theory, and (3) clarify the key issues of future research studies. To this end, Sect. 2 focuses on applications of nonlocal continuum models in static analysis of CNTs and GSs. Section 3 surveys applications of nonlocal continuum models in dynamic analysis of CNTs and GSs. Section 4 presents a summarization of elastic models. Section 5 gives a summary and recommendations for future research studies.
2 Application in Static Analysis of CNTs and GSs
Since static loadings in transverse direction may lead to bending of nano-materials, the development and application of nonlocal continuum mechanics in studying scale effects on static responses of nano-materials are of great significance (Wang and Liew 2007). In addition, CNTs are susceptible to buckling or structural instability due to their long and hollow tubular structures (Chaste et al. 2012; Hernández et al. 1998). This can significantly influence their performance as structural or functional elements in CNT-based nano-composites and nano-electromechanical systems (Wagner et al. 1998; Thostenson et al. 2001; Qian et al. 2002; Lau K-t and Hui 2006; Stankovich et al. 2006). Therefore, tremendous efforts have also been devoted to buckling of CNTs under diverse loading conditions such as axial loading (Sudak 2003; Zhang et al. 2004; Wang et al. 2006a, b, c; Murmu and Pradhan 2009a, b, c, d; Zhang et al. 2009a, b), radial and bending loading (Zhang et al. 2006, 2010; Xie et al. 2006; Shen 2010a, b), thermal loading (Li and Kardomateas 2007; Yan et al. 2010; Amara et al. 2010; Wang et al. 2010a, b, c) and torsion (Hao et al. 2010; Mohammadimehr et al. 2010; Khademolhosseini et al. 2010; Shen and Zhang 2010).
2.1 Bending of CNTs Under Static Transverse Loadings
Wang and Liew (Wang and Liew 2007) investigated the scale effect on static deformation of micro- and nano-rods or tubes subjected to transverse loadings by using the nonlocal Euler-Bernoulli and Timoshenko beam theories. The major finding on cantilever nano-rods is reviewed below.
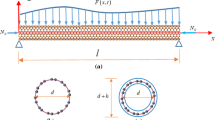
The transverse deformation of cantilever nano-rod with length \( L \) subjected to a concentrated force \( P \) at \( x = l \) via the nonlocal Euler-Bernoulli and Timoshenko beam theories are provided to be (Wang and Liew 2007).
where subscripts E and T denote Euler-Bernoulli and Timoshenko beam theories, respectively. \( H\left( {x - l} \right) \) is the Heaviside function, \( \Upomega = \frac{EI}{{GA\kappa L^{2} }} = \frac{1 + \upsilon }{8\kappa }\left( \frac{d}{L} \right)^{2} \) is the shear parameter, \( \upsilon \) is Poisson’s ratio, and \( d \) is the diameter of the rod or tube under investigation. The coefficient, \( {d \mathord{\left/ {\vphantom {d L}} \right. \kern-0pt} L} \), represents the slenderness of the structure.
Equations (1) and (2) reveal that the small-scale term, \( P\left( {e_{0} a} \right)^{2} (x - l)H(x - l) \), affects the response of the cantilevered rod only for the space domain \( x \ge l \). Moreover, Eq. (2) shows that the nonlocal Timoshenko beam theory does not induce additional scale effect compared to the nonlocal Euler-Bernoulli beam theory for the cantilevered rod.
They further investigated an additional example on the deformation profiles along the length of a cantilevered rod or tube subjected to a concentrated force at the middle as shown in Fig. 1. In Fig. 1, the scale effect and the diameter-to-length ratio have been given as \( {{e_{0} a} \mathord{\left/ {\vphantom {{e_{0} a} L}} \right. \kern-0pt} L} = 0.2 \) and \( {d \mathord{\left/ {\vphantom {d L}} \right. \kern-0pt} L} = 0.2 \), respectively. A noticeable observation is that there is no scale effect on the deformation at all locations on the left side of the point force, and such effect initiates immediately after the location of the point force. Their results also showed that the small-scale effect is noticeable for nano-structures in their static responses. On the other hand, the scale effect is obscure when the length of the structure is over 20 nm. Therefore, they concluded that scale effects would not manifest for typical micro-systems such as microelectromechanical systems (MEMS) which have lengths of the order \( {rm\mu} \text{m} \). In addition, the shear effect is evident for nano-structures indicating the importance of applying the Timoshenko beam theory in static analysis of shorter nano-structures. Nano-beams as potential nano-switches subjected to a transverse electrostatic force within the framework of nonlocal elasticity theory to account for the small-scale effect were studied by Yang et al. (2008). The transverse electrostatic force from an applied voltage and intermolecular force was approximated as a linear distributed load model and closed-form solutions were obtained for cantilever and fixed–fixed nano-beams.

Static deformation of a cantilever structure subjected to a force at the middle by using local and nonlocal models: local Euler-Bernoulli beam model (LE), nonlocal Euler-Bernoulli beam model (NE), local Timoshenko beam model (LT) and nonlocal Timoshenko beam model (NT) (Wang and Liew 2007)
2.2 Buckling of CNTs and GSs
Sudak (2003) investigated the buckling of CNTs subjected to axial loading using the nonlocal continuum theory. In the study, the nonlocal Euler- Bernoulli beam model for the buckling of multi-walled carbon nanotubes (MWCNTs) was presented which clearly demonstrated that small-scale effects significantly contribute to buckling solution of MWCNTs. Explicit expressions for the critical buckling load and strain were derived for axially loaded rods/tubes based on the nonlocal Timoshenko beam theory (Zhang et al. 2004; Wang et al. 2006a, b, c ). Wang et al. (2006a, b, c) developed nonlocal elastic beam and shell models to investigate the small-scale effect on buckling analysis of CNTs under compression. They derived a general buckling solution for CNTs with a length of L and various boundary conditions via the nonlocal beam model as
where \( P_{l} = EI\left( {{{\beta \pi } \mathord{\left/ {\vphantom {{\beta \pi } L}} \right. \kern-0pt} L}} \right)^{2} \) is the buckling solution for a beam structure via the local elastic beam theory and \( EI \) is the bending rigidity. \( \beta \) has different values given for different boundary conditions. For example, the buckling solutions for the first three modes are: \( \beta = 1,\,2,\,3 \) for a pinned-pinned CNT, \( \beta = {1 \mathord{\left/ {\vphantom {1 2}} \right. \kern-0pt} 2},\,{3 \mathord{\left/ {\vphantom {3 2}} \right. \kern-0pt} 2},\,{5 \mathord{\left/ {\vphantom {5 2}} \right. \kern-0pt} 2} \) for a cantilevered CNT, and \( \beta = 2,\,4,\,6 \) for a fixed-fixed CNT. From Eq. (3), it is obvious that the scale effect is indispensable in providing more accurate results for mechanical behaviors of CNTs with lengths of the order nm via continuum mechanics. On the other hand, the small-scale effect is negligible for CNTs with lengths of the order \( \mu \,m \). The explicit solutions for CNTs buckling analysis via nonlocal continuum mechanics provided benchmark for scale effect studies of CNTs mechanical analyses. The nonlocal Timoshenko beam model was implemented (Murmu and Pradhan 2009a, b, c, d) to investigate an axial buckling of single-walled CNTs (SWCNTs) embedded in an elastic medium, and the influence of the small-scale effect and stiffness of the surrounding medium was investigated. Zhang et al. (2009a, b) presented an assessment of nonlocal beam and shell models in the prediction of critical buckling strains of axially loaded SWCNTs by use of MD simulation results for SWCNTs.
A nonlocal multiple-shell model was developed for the elastic buckling of MWCNTs under uniform external radial pressure (Zhang et al. 2006; Xie et al. 2006). To investigate the bending, buckling and vibration responses of CNTs, Zhang et al. (2010) employed the hybrid nonlocal beam model. The radial and bending buckling behaviors of microtubules were also studied based on the nonlocal elasticity theory (Shen 2010a, b). Since there are insufficient results by MD simulations or experiments for radial and bending buckling, the use of the small-scale parameter calibrated for vibration and axial buckling to radial and bending buckling analysis was recommended. Such a recommendation was not justified. It is pointed out here that the parameter calibrated in vibration or axial buckling analysis may not be applicable to another type of motion of CNTs. It is hence recommended that a nonlocal model is confirmed to be applicable to a nano-material for a type of motion only after the scale parameter is carefully calibrated for the material with the type of motion.
In order to study the thermal buckling behavior of MWCNTs, a nonlocal elastic shell model was developed (Li and Kardomateas 2007). Buckling governing equations of CNTs were formulated on the basis of the nonlocal elastic theory and the small-scale effect on CNTs buckling results under the temperature field was investigated (Yan et al. 2010; Amara et al. 2010). Wang et al. (2010a, b, c) studied the thermal buckling properties of CNTs based on the nonlocal continuum theory and the Timoshenko beam model. They concluded that small-scale effects should be considered for thermal buckling behaviors, especially for higher mode numbers and short CNTs.
Nonlocal elasticity shell models were presented to study torsional buckling of CNTs in Refs. (Hao et al. 2010; Mohammadimehr et al. 2010; Khademolhosseini et al. 2010; Shen and Zhang 2010). The scale coefficient was estimated by matching the buckling torque of CNTs observed from MD simulation results with the numerical results obtained from the nonlocal shear deformable shell model (Khademolhosseini et al. 2010). Khademolhosseini et al. (Shen and Zhang 2010) performed torsional buckling of SWCNTs using MD simulations and nonlocal shell models. To match the results obtained from nonlocal continuum models to those of MD simulations, different values of effective thickness of CNTs were manually enforced in local and nonlocal continuum models. Enforcing different values of the effective thickness in continuum models to match the atomistic results may not be a feasible way as the physical properties of materials should not be manually set to justify any proposed models.
The buckling analysis of single-layered GSs (SLGSs) under biaxial and uniaxial compression was studied using the nonlocal continuum mechanics (Murmu and Pradhan 2009a, b, c, d; Pradhan 2009; Pradhan and Murmu 2009, 2010; Pradhan and Kumar 2011a, b). GSs have been acknowledged to be a membrane structure among researches in nano-community. In structural mechanics, a membrane is a structure with negligible bending rigidity (Gao and Hao 2009; Lu and Huang 2009). Because of this, a membrane structure is unable to be subjected to any notable compression loading and bending, or the capacity of buckling load of such a structure is almost zero. However, it is pointed out here that GSs can be subjected to in-plane shear leading to another type of local buckling state, wrinkles (Duan et al. 2011). Wrinkles are observed in GSs due to their relatively small bending rigidity. A continuum model was developed for the characteristics of the wrinkles which show that the wrinkle wavelength decreases with an increase in shear loading, while the amplitude of the wrinkles is found to initially increase and then become stable (Duan et al. 2011). So far, there have been few studies on ripples (Fasolino et al. 2007) GSs and failure of GSs and graphene nanoribbons (GNRs) under tensile loadings using the nonlocal continuum theory. Therefore, future studies are required to evaluate nonlocal models in simulation of ripples in GSs and failure of GSs and GNRs under tensile loadings.
3 Application in Dynamic Analysis of CNTs and GSs
Now we turn our attention to applications of nonlocal models in vibration and wave propagation of CNTs and GSs. The vibration of nanotubes and graphenes is an important subject in nanotechnology since it is related to the electronic and optical properties of nanostructures (Sirtori 2002; Antonelli et al. 2002; Brauns et al. 2002). Furthermore, growing interests in design of terahertz devices at nanoscale sizes (Bunch et al. 2007; Schedin et al. 2007; Chiu et al. 2008) have drawn more attention to CNTs and GSs phonon dispersion relation, especially in the terahertz frequency range. Therefore, the study of vibration of and wave propagation in CNTs and GSs has technological significance in gaining a more in-depth understanding of dynamic behaviors of CNTs and GSs. The factors that influence dynamic behaviors of CNTs and GSs such as geometry of CNTs (radius, length, and number of tubes), geometry of GSs (width, length, and number of layers), surrounding medium, temperature and boundary conditions are investigated.
3.1 Free Vibration of CNT
A nonlocal double-elastic beam model for free transverse vibrations of double-walled CNTs (DWCNTs) was developed by Zhang et al. (2005). They studied the small-scale effect on vibrational properties of CNTs. Wang and Varadan (2006) investigated vibration of SWCNTs and DWCNTs based on nonlocal beam theories and explicitly derived small-scale effects on vibration characteristics of CNTs. They showed that the results based on nonlocal continuum mechanics are in agreement with a published experimental report. They derived resonant frequency for mode n, \( \omega_{n} \), of an SWNT with a length of L and simply supported boundary condition as follows
where \( \omega^{\prime}_{n} = \frac{{n^{2} \pi^{2} }}{{L^{2} }}\sqrt {\frac{EI}{\rho A}} \) is the resonant frequency of the CNT obtained on the basis of the classical or local Euler-Bernoulli beam theory; \( EI \)is the bending rigidity; \( \rho \) is the mass density; and A is the cross sectional area of the CNT. From Eq. (4), the small-scale effects decrease by an increase in the length of a CNT. The governing equations were solved analytically for the vibration frequencies of beams with various end conditions (Wang et al. 2007). The axial vibration frequencies were shown to be highly over estimated by the local rod model, which ignores the effect of small length scale (Aydogdu 2009; Filiz and Aydogdu 2010; Murmu and Adhikari 2010). A nonlocal Timoshenko beam model was reformulated to study nonlinear free vibration of SWCNTs based on von Karman geometric nonlinearity and Eringen’s nonlocal elasticity theory (Yang et al. 2010). Duan et al. (2007) calibrated the scale coefficient of the nonlocal Timoshenko beam theory for a free vibration of SWCNTs by using vibration frequencies generated from MD simulations at room temperature. They showed that the calibrated \( e_{0} \) ranges between 0 and 4 for a (5, 5) SWCNT with clamped-clamped boundary condition versus length-to-diameter ratio from 1 to 14. It is worth mentioning that adopting various \( e_{0} \) at every distinct length-to-diameter ratio may be inconvenient in applying the nonlocal model. In view of this problem, Arash and Ansari (2010) assessed a nonlocal shell model to analyze vibration characteristics of SWCNTs with different boundary conditions subjected to initial strain. They calibrated the small-scale parameter for a wide range of length-to-diameter ratios from 5 to 35 by use of MD simulations as a benchmark of good accuracy and showed that the small-scale parameter, \( e_{0} a \), only depends on boundary condition. The small-scale parameter, \( e_{0} a \), was respectively justified to range from 1.7 to 2 nm for clamped-clamped and clamped-free SWCNTs. The use of a unique small-scale parameter, \( e_{0} a \), for a wide range of length-to-diameter ratio is more practical. Li and Kardomateas (2007) formulated a nonlocal shell model for free vibrations of MWCNTs. They found that resonant frequencies decrease due to the van der Waals (vdW) interaction between two adjacent nanotubes. The effectiveness of local and nonlocal Timoshenko beam models in the vibration analysis of SWCNTs with different boundary conditions was assessed by Zhang et al. (2009a, b). The scale coefficient,\( e_{0} \), was derived to be 1.25 for a range of length-to-diameter ratio from around 5 to around 35. Murmu and Pradhan (2009a, b, c, d) analyzed a thermal vibration analysis of SWCNTs based on the nonlocal elasticity theory. Lee and Chang (2009) developed a nonlocal Euler-Bernoulli elastic beam model for the vibration of nanotubes conveying fluid using the theory of nonlocal elasticity. They observed that the nonlocal effect on the fundamental frequency becomes significant as the flow velocity of viscous fluid decreases. In addition, the viscosity effect on the frequency of SWCNTs becomes significant as the flow velocity of viscous fluid increases. Wang (2009) obtained the resonant frequencies and critical flow velocities of tubular nano- and micro-beams conveying fluid using nonlocal elastic theory. Results showed that the small-scale effect on the critical flow velocities is visible for fluid-conveying nanotubes with nano-scale length; however, and this effect may be neglected for micro-scale length. Pradhan and Murmu (2010) developed a single nonlocal beam model to investigate the flapwise bending-vibration characteristics of a rotating nanocantilever. Dynamic analysis of nanotube structures under excitation of a moving nanoparticle was carried out using nonlocal continuum theory (Kiani and Mehri 2010; Kiani 2010). Based on the nonlocal elasticity theory, elastic beam models were developed for analysis of dynamical behavior of fluid conveying SWCNTs embedded in an elastic medium (Zhen and Fang 2010; Soltani et al. 2010). Vibration analysis of a simply-supported SWCNT subjected to a moving harmonic load was investigated by using the nonlocal Euler-Bernoulli beam theory (Şimşek 2010). The potential of SWCNTs as mass sensors via a vibration analysis was investigated using nonlocal elasticity theory (Lee et al. 2010; Aydogdu and Filiz 2011). Frequency shifts of the nanotubes caused by attached mass were examined to measure the sensitivity of the sensors. It is suggested again that the verification of results obtained by nonlocal continuum models and calibration of the small-scale parameter are indispensable for applicability and justification of the models.
3.2 Wave Propagation in CNT
Wang (2005) first investigated wave propagation in CNTs with nonlocal elastic Euler-Bernoulli and Timoshenko beam models. The work revealed the significance of the small-scale effect and the limitation of the applicability of local continuum models in analysis of wave propagation in CNTs. It was also found that the experimental results are qualitatively in agreement with the simulations derived from nonlocal continuum models. Further, a conservative evaluation on the small-scale parameter of \( e{}_{0}a < 2.1\,nm \) was suggested for wave propagation in SWCNTs. Wang and Hu (2005) studied on the flexural wave propagation in armchair (5, 5) and (10, 10) SWCNTs for a wide range of wave numbers by use of the nonlocal beam models and the MD simulations. Their simulation results showed that the nonlocal Timoshenko beam model provides a better prediction for the dispersion of flexural waves in the two SWCNTs than the nonlocal Euler beam. They proposed the scale coefficient \( e_{0} = 0.288 \) for a wide range of wave length from ~0.2 to ~70 nm for the flexural wave propagation in an SWCNT through the comparison results of nonlocal Timoshenko beam model and MD simulations. Such a speculation of a unique coefficient may not be practical as pointed out by later studies from other scholars. The nonlocal Euler-Bernoulli and Timoshenko beam models were proposed by Wang et al. (2006a, b, c) to study the small-scale effect on wave dispersion results for DWNTs with respect to the variation of DWNT’s wavenumbers and diameters. Wang and Varadan (2007) showed that the nonlocal shell theory is indispensable in predicting CNT phonon dispersion relations at larger longitudinal and circumferential wavenumbers and smaller wavelength in the circumferential direction. Hu et al. (2008) modeled SWCNTs and DWCNTs as nonlocal single and double elastic cylindrical shells. It was indicated that the wave dispersion predicted by the nonlocal elastic cylindrical shell theory is in good agreement with that of the MD simulations in a wide frequency range up to the terahertz region. They also reported that nonlocal shell models are required when the wavelengths are approximately less than 2.36 nm and 0.95 nm for transverse wave in an armchair (15, 15) SWCNT and torsional wave in an armchair (10, 10) SWCNT, respectively. The MD-based estimation of the scale coefficient \( e_{0} \) for the nonlocal elastic cylindrical shell model was suggested to be 0.6 and 0.2 for transverse wave and torsional wave in CNTs, respectively. The small-scale parameter introduces certain band gap region in both flexural and shear wave mode where no wave propagation occurs when the wavenumber tends to infinite (Narendar and Gopalakrishnan 2009). The frequency at which this phenomenon occurs is called the “Escape frequency” and it is proportional to the nonlocal scaling parameter.
3.3 Free Vibration of GSs
On the basis of the nonlocal constitutive relations of Eringen, Pradhan and Phadikar (2009) reformulated the classical plate theory (CLPT) and the first-order shear deformation theory (FSDT) to study free vibrations of GSs. The difference in the frequencies predicted by CLPT and FSDT is significantly smaller for double layered plate than that for single layered plate (Wang et al. 2010a, b, c). Murmu and Pradhan (2009a, b, c, d) studied small-scale effect on the free in-plane vibration of nano plates by a nonlocal continuum model. A vibration analysis of orthotropic GSs was also conducted (Pradhan and Kumar 2010, 2011a, b). A nonlocal plate model based on FSDT was developed to study free vibrations of embedded multi-layered GSs (MLGSs) (Ansari et al. 2010a, b, 2011). A nonlocal plate model for the nonlinear vibration of SLGSs with simply supported boundary conditions in thermal environments was presented and the small-scale parameter was estimated by matching the natural frequencies of SLGSs observed from the MD simulation results with those of the nonlocal plate model (Shen et al. 2010). There has been no evidence on necessity of using third order shear deformation theory to model GSs. Ansari et al. (2010a, b) evaluated a nonlocal plate model to predict the resonant frequency of SLGSs. They calibrated the small-scale parameter (\( e_{0} a \)) for the free vibration of squared shaped SLGSs with simply-supported and clamped boundary conditions for a wide range of sizes from 10 nm to 50 nm by use of MD simulation results as a benchmark. Their simulation results showed that the values of \( e_{0} a \) are 1.41 and 0.87 nm for simply-supported and clamped SLGSs. Arash and Wang (2011) investigated free vibrations of single-layered graphene sheets (SLGSs) and double-layered GSs (DLGSs) with different boundary conditions by employing the nonlocal continuum theory and MD simulations. The vibrations of DLGS with different combinations of boundary conditions between two layers were studied. The dependence of boundary conditions and vibrational modes on calibration of the scale coefficient for a range of sizes of GSs was also investigated. They showed that the classical elastic model overestimated the resonant frequencies of the sheets by a percentage as high as 62 % at sizes of 2.47 nm. The nonlocal plate model is found to be indispensable in vibration analysis of GSs with a length less than 8 nm on their sides (Arash and Wang 2011). Their results showed that the difference between local plate model and nonlocal counterpart remains significant for all ranges of GS aspect ratios, and the overestimation is found to be around 50 % at GS aspect ratio of \( a/b = 4 \).
3.4 Wave Propagation in GSs
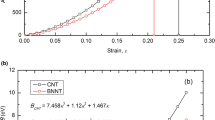
Wave propagation in GS was studied in Refs. (Wang et al. 2010a, b, c; Arash et al. 2012). It was shown that the scale coefficient introduces certain band gap region in in-plane and flexural wave modes where no wave propagation occurs (Wang et al. 2010a, b, c). This is manifested as the region where the wavenumber tends to infinite or wave speed tends to zero. Arash et al. (2012) developed a finite element (FE) model from the weak-form of the nonlocal elastic plate model and fulfilled a comprehensive study on wave propagation in GSs. They showed that the nonlocal FE plate model is indispensable in predicting graphene phonon dispersion relations, especially at wavelengths less than 1 nm, when the small-scale effect becomes dominant. Moreover, the small-scale parameter, \( e_{0} a \), was calibrated through the verification process with results of MD simulations and a calibrated nonlocal parameter \( e_{0} a = 0.18\;{\text{nm}} \) was recommended for a GS with a size of for wavenumber ranging from \( 2.55 \times 10^{9} \) to \( 9.17 \times 10^{9} \,\text{1/m} \). From Fig. 2, it is found that as wavenumber increases from \( 2.55 \times 10^{9} \) to \( 9.17 \times 10^{9} \,\text{1/m} \), the phase velocity tends to increase from \( 1.32 \times 10^{3} \)to \( 3.44 \times 10^{3} \,\text{m/s} \) and the small length scale effects become dominant indicating a high scale effect in wave propagation in the GS.

Dispersion relations of a GS with a size of \( 3.62\; \times \;15.03\;nm \) obtained from MD simulations, the local FEM plate model, and the nonlocal FEM model (Arash et al. 2012)
4 A Re-Visit on Nonlocal Elastic Models
Nonlocal continuum mechanics models have been found to successfully describe mechanical behaviors of nano-materials. The results obtained by the nonlocal continuum models have been compared with those from MD simulations (Duan et al. 2007; Arash and Ansari 2010; Hu et al. 2008; Ansari et al. 2010a, b; Arash and Wang 2011). Inspired by the pioneering works, many continuum models, including beam models, cylindrical shell models, and plate models based on the nonlocal continuum theory, have been developed and applied in studying static and dynamic analysis of CNTs and GSs. In the following section, we provide a general introduction of the elastic beam, shell, and plate models for analysis of CNTs and GSs.
4.1 General Theory
According to the nonlocal theory by Eringen (1976, 1983), the stress at a reference point x in an elastic continuum not only depends on the strain at the point but also on strains at every point of the body. The basic equations for linear homogenous and isotropic elastic solids neglecting the body forces are
where \( \sigma_{ij} \) and \( \varepsilon_{ij} \) are the stress and strain tensors, respectively; \( C_{ijkl} \) is the elastic modulus tensor in classical isotropic elasticity; and \( u_{i} \)is the displacement vector. Eq. (1) shows that stress (\( \sigma \)) at a reference point depends on local strain at the source \( x^{\prime} \)induced by deformation within a finite volume, \( V \), surrounding the material point, by means of a nonlocal kernel \( \lambda \left( {\left| {x - x^{\prime}} \right|,\,\alpha } \right) \) that weights the classical strains around point \( x\,.\,\lambda \) is the nonlocal modulus or attenuation function which is a function of the distance in Euclidean form, \( \left| {x - x^{\prime}} \right| \), and a material constant \( \alpha \). Material constant \( \alpha \) defined as \( e_{0} a/l \) depends on the internal characteristics lengths, \( a \) (lattice parameter, granular size, distance between C–C bonds), external characteristics lengths \( l \) (crack length, wave length) and \( e_{0} \) is a constant appropriate to each material. The parameter \( e_{0} a \) is the small-scale parameter revealing the small-scale effect on the responses of structures of nano-size. Generally, a conservative estimate of the small-scale parameter is \( e_{0} a < 2\,nm \) for an SWCNT (Wang 2005) for wave propagation. Note that this value is both chirality and size dependent, as the material properties of CNTs are widely acknowledged to be chirality dependent. So far, there is no rigorous study made on estimating the scale coefficient. It is suggested that the coefficient be determined by conducting a comparison of dispersion curves from nonlocal continuum mechanics and lattice dynamics of nano-material crystal structure (Eringen 1976, 1983).
The kernel function \( \lambda (|x - x^{'} |,\alpha ) \) is given by Eringen as
where \( K_{0} \) is the modified Bessel function. By combining Eqs. (5) and (6), the constitutive relation may be obtained as
where \( \nabla^{2} \) is the Laplacian operator.
4.2 Elastic Beam Model
It is well known that CNTs are slender tube like hollow structures with high aspect ratios. A slender CNT behaves like an elastic beam during motions, in which the central axis of the beam deforms sideways and the deformation pattern can thus be described as a single deflection. The simplest beam theory is the Euler-Bernoulli beam theory (EBT) (Sudak 2003; Wang and Liew 2007; Wang and Varadan 2006; Wang et al. 2006a, b, c; Reddy 2007; Adali 2008; Aydogdu 2009), in which Hook’s law for one-dimensional stress state can be determined by
where E is the Young’s modulus of the material. The resultant bending moment and the kinematics relation in a beam structure are given as
where y is the coordinate measured from the mid-plane in the height direction of the beam and \( w(x,\,t) \) is the flexural deflection of the beam. The equilibrium equations of a vibrating beam structure subjected to an axial loading, \( P \), and transverse loading, \( q \), can be easily provided below:
where \( V\left( {x,t} \right) \) and \( M\left( {x,t} \right) \) are the resultant shear force and bending moment on the beam; \( \rho \) is the mass density of the material, and A is the cross sectional area of the beam. Substituting Eq. (10b) into (10a) leads to the nonlocal Euler-Bernoulli beam model,
from which it is easily seen that the local or classical Euler-Bernoulli beam model is recovered when the parameter \( e_{0} \) is identically zero.
Modeling of applications of CNTs can be extended from the above fundamental modeling. For example, the analysis of the vibration and stability of an SWCNT conveying fluid can be theoretically studied with a model provided below:
where \( m_{f} \) the mass of fluid per unit length in the carbon nanotube.
The Euler beam model is adequate for the static and dynamic analysis of CNTs with high aspect ratios. However, it is well known that the model neglects the transverse shear deformation. Thus, the nonlocal Timoshenko beam model was developed in analysis of static and analysis of CNTs by considering the effects of transverse shear deformation and rotary inertia (Wang and Liew 2007; Murmu and Pradhan 2009a, b, c, d; Wang et al. 2006a, b, c, 2007; Wang and Wang 2007; Reddy 2007).
Two nonlocal Timoshenko beam models have been presented in literature. In both models, small scale effect was well modeled in constitutive relation of normal stress and strain as shown in Eq. (8). The only difference is on the necessity of including the scale effect in shear force and strain relation. When the small-scale effect is considered in shear force term (Reddy 2007), the equilibrium equation in terms of displacement, \( w \), and rotation, \( \varphi \), is given as
Different from the model, Wang and Wang (2007) suggested a nonlocal Timoshenko model in which the small-scale effect is not exerted on the shear force term. The reasoning is provided hereinafter. In the Timoshenko theory, \( \gamma_{0} = \frac{\partial w}{\partial x} - \varphi \) is defined as the shear strain at the centroidal axis, and the relation of the shear force and the shear strain is directly defined as \( V = K_{s} AG\left( {\frac{\partial w}{\partial x} - \varphi } \right) \) where \( K_{s} \) is the shear correction factor, \( G \) is the shear modulus and A is the cross-sectional area. Therefore, the relation of the shear force and shear strain suggested in the Timoshenko beam theory is applied to the entire straight cross section, and not to a single point on the section. The assumed relation makes the local Timoshenko beam somewhat different from the local Euler-Bernoulli beam theory in which the shear stress at a certain point is related to the strain at the point. Hence, the shear stress at a cross section in the Timoshenko theory has already been considered to be a function of the strain of the cross section as a whole, the nature of a nonlocal variable. In view of this, in the nonlocal Timoshenko model, the consideration of the scale effect on the shear force may not be necessary.
In Fig. 3, we compare the fundamental resonant frequency of SWCNTs obtained from the two nonlocal Timoshenko beam models to show that modeling of scale effect in shear force is not a key consideration in the beam models. The scale effect is only indispensible in normal stress and strain relation, as shown in Eq. (8). The variation of resonant frequency of an SWCNT with length (\( L \)) ranging from 5 to 50 nm, diameter (\( d \)) 1 and 2 nm and simply-supported boundary condition modeled by the two nonlocal Timoshenko beam models is presented in Fig. 3. The mechanical parameters are set as follows: the Young’s modulus \( E = 1\,TPa \), the Poisson’s ratio \( v = 0.19 \), the mass density \( \rho = 2.3\,g/\varvec{\text {cm}}^{3} \), the effective thickness \( t = 0.34\,{\rm nm} \) the small-scale parameter \( e_{0} a = 2\,{\rm nm} \) and the shear correction factor \( K_{s} = 10/9 \). The difference percentage of fundamental resonant frequency obtained by the two nonlocal Timoshenko models for an SWCNT with a diameter of 2 nm decreases from 8 % at the length of 5 nm (\( {\raise0.7ex\hbox{$L$} \!\mathord{\left/ {\vphantom {L d}}\right.\kern-0pt} \!\lower0.7ex\hbox{$d$}} = 2.5 \)) to only 2.5 % at the length of 10 nm (\( {\raise0.7ex\hbox{$L$} \!\mathord{\left/ {\vphantom {L d}}\right.\kern-0pt} \!\lower0.7ex\hbox{$d$}} = 5 \)). As it is shown, the modeling of the small-scale effect in shear relation on resonant frequency is not necessary.

Influence of the small-scale effect in shear constitutive relation oresonant frequency of an SWCNT with length ranging 5 and 50 nm, diameter 1 and 2 nm, simply-supported boundary condition and \( e_{0} a = 2\,nm \) modeled by two nonlocal Timoshenko beam models
4.3 Elastic Shell Model
In addition to nonlocal beam models, CNTs with lower length-to-diameter ratios have been models with elastic shell models for their shell-like motions in which these CNTs move sideways while maintaining their straight axes. Hence, nonlocal shell models become indispensable especially when the length-to-radius ratio of CNTs decreases.
Two shell theories, i.e. the classical shell theory (Li and Kardomateas 2007; Wang and Varadan 2007; Hu et al. 2008) and FSDT (Arash and Ansari 2010), have been widely considered in literature for static and dynamic analysis of nanotubes.
In the classical shell theory, the three-dimensional displacement components \( u_{x} ,\,u_{y} \) and \( u_{z} \) in the \( x,\,\theta \) and \( z \) directions respectively are assumed to be
where \( u,\,v \) and \( w \) are the reference surface displacements. For a CNT with a radius \( R \), length \( L \) and thickness \( h \), the governing equations of a nanotube subjected to axial load, \( \bar{N}_{xx} \),orsional force, \( \bar{N}_{x\theta } \), and external pressure, \( \bar{N}_{\theta \theta } \), on the basis of Flugge’s shell theory are given as (Wang and Varadan 2007; Hu et al. 2008)
where \( N_{xx} ,\;N_{\theta \theta } ,\,N_{x\theta } ;\,M_{xx} ,\,M_{\theta \theta } ,\,M_{x\theta } \) are the components of internal force and the internal moments into which the small-scale effect has been incorporated (Wang and Varadan 2007). \( x \) and \( \theta \) denote the longitudinal and circumferential coordinates, respectively. Equation (15) in terms of the three field variables (\( u,\,v \) and \( w \)) are given in Ref. (Arash and Wang 2012).
In the FSDT, the three-dimensional displacement components \( u_{x} ,\; u_{y} \)and \( u_{\text{z}} \) in the \( x,\,\theta \) and \( z \) directions respectively are assumed to be
where \( u, v \) and \( w \)are the reference surface displacements and \( \psi_{x} , \;\psi_{\theta } \) are the rotations of transverse normal about the x-axis and y-axis, respectively. The governing equations of a shell subjected to a axial force, \( \overline{N}_{xx} \), torsional force, \( \overline{N}_{x\theta } \), and external pressure, \( \overline{N}_{\theta \theta } \), on the basis of the Donnell shell theory are given as (Arash and Ansari 2010).
where \( N_{xx} ,\;N_{\theta \theta } ,\,N_{x\theta } ;\,Q_{xx} ,Q_{\theta \theta } ;\,M_{xx} ,\,M_{\theta \theta } ,\,M_{x\theta } \) are the components of internal force and the internal moments into which the small-scale effect has been incorporated (Arash and Ansari 2010). \( I_{i} = \int_{{{\raise0.7ex\hbox{${ - h}$} \!\mathord{\left/ {\vphantom {{ - h} 2}}\right.\kern-0pt} \!\lower0.7ex\hbox{$2$}}}}^{{{\raise0.7ex\hbox{$h$} \!\mathord{\left/ {\vphantom {h 2}}\right.\kern-0pt} \!\lower0.7ex\hbox{$2$}}}} {\rho z^{i} dz} \,\,(i = 0,\,1,\,2) \) is the mass moment of inertia where \( \rho \) is the mass density. The nonlocal first order shell model in terms of displacements and rotations is provided in Ref. (Arash and Wang 2012).
4.4 Elastic Plate Model
GSs have been modeled by nonlocal continuum theories as two-dimensional nano-plates (Pradhan and Phadikar 2009; Murmu and Pradhan 2009a, b, c, d; Pradhan and Kumar 2010, 2011a, b; Ansari et al. 2010a, b; 2011; Shen et al. 2010; Arash and Wang 2011). In continuum plate models, the classical plate theory (CLPT) (Pradhan and Phadikar 2009; Murmu and Pradhan 2009a, b, c, d; Arash and Wang 2011) and FSDT (or Mindlin plate theory) (Pradhan and Phadikar 2009; Pradhan and Kumar 2010; Ansari et al. 2010a, b) have been incorporated in modeling the nanoplates.
In CLPT, transverse shear strains are neglected. Based on the CLPT, the three-dimensional displacement components \( u_{x} ,\; u_{y} \) and \( u_{\text{z}} \) in the \( x,\,y \) and \( z \) directions respectively are assumed to be
where \( u, \;v \) and \( w \) are the reference surface displacements. The dynamic equilibrium equations of the stress and moment resultants are given as (Pradhan and Phadikar 2009; Pradhan and Kumar 2010; Ansari et al. 2010a, b)
The nonlocal plate model of a single-layered graphene sheet in terms of the displacements is given below when the rotary inertia is considered:
In FSDT, the three-dimensional displacement components \( u_{x} ,\; u_{y} \) and \( u_{z} \) in the \( x,\,y \)and \( z \) directions respectively are assumed to be
where \( u,\,v \) and \( w \) are the reference surface displacements. The governing Mindlin-type equations are given as
where \( N_{xx} ,\;N_{yy} ,\,N_{xy} ;\,Q_{xx} ,Q_{yy} ;\,M_{xx} ,\,M_{yy} ,\,M_{xy} ;\,I_{0} ,\,I_{1} ,\,I_{2} \) are the components of internal force, the internal moments into which the small-scale effect has been incorporated and mass moments of inertia (Pradhan and Phadikar 2009; Pradhan and Kumar 2010; Ansari et al. 2010a, b). The nonlocal Mindlin plate theory in terms of displacements and rotations is given in Ref. (Arash and Wang 2012).
It has been shown that resonant frequency of GSs obtained from the nonlocal plate model based on CLPT and FSDT are in good agreement with those of MD simulations (Ansari et al. 2010a, b; Arash and Wang 2011). Higher order models for analyzing GSs have not been found to be necessary for analysis of nano-plates so far.
5 Conclusions
CNTs and GSs are increasingly holding many potential applications in the ever-growing nanotechnology industry due to their superior mechanical and physical properties. A detailed understanding of mechanical behaviors of the two materials is crucial. Among different approaches for modeling nanostructures, the nonlocal continuum mechanics theory allows the consideration of the small-scale effects in analysis of nano-materials, which makes the theory as an effective way in simulating the nano-materials. The nonlocal beam and shell models have been widely employed in analysis of the static and dynamic problems of CNTs and GSs.
The determination of the magnitude of the small-scale parameter is the key issue in a successful application of the nonlocal continuum models. However, their validity has been rarely confirmed by atomistic simulation or experimental results. The value of the small-scale parameter depends on boundary condition, chirality, mode shapes, number of walls, and the nature of motions. More studies are needed to fully evaluate the nonlocal continuum models in analysis of the behavior of the nano-materials, especially MWCNTs embedded in an elastic medium with various boundary conditions, dimension and chirality.
High order continuum models providing complicated equations are not practical. Furthermore, there is not any evidence on necessity of using high order continuum models for analysis of CNTs and GSs. In sum, nonlocal Euler-Bernoulli and Timoshenko beam models for long CNTs and elastic shell models based on classical shell theory and FSDT are sufficient to model static and dynamic behavior of short CNTs. Also, plate models based on CLPT and FSDT are adequate to analyze GSs.
Further studies on the nonlocal elastic theory will focus on their applications in modeling of new applications of CNTs and GSs. On example would be the study on vibration characteristic of CNTs and GSs for modeling them as potential mass sensors using the nonlocal continuum theory. SWCNTs have been identified to be able to transport encapsulated atoms and nano-particles via the driving force induced by the vdW interaction between the CNT wall and the filled atoms and nano-particles. Transportation of nano-particles using nonlocal continuum models can be another interesting research area.
References
Adali S (2008) Variational principles for multi-walled carbon nanotubes undergoing buckling based on nonlocal elasticity theory. Phys Lett A 372(35):5701–5705
Amara K, Tounsi A, Mechab I, Adda-Bedia EA (2010) Nonlocal elasticity effect on column buckling of multiwalled carbon nanotubes under temperature field. Appl Math Model 34(12):3933–3942
Ansari R, Arash B (2013) Nonlocal Fl[u-umlaut]gge shell model for vibrations of double-walled carbon nanotubes with different boundary conditions. J Appl Mech 80(2):021006–021012
Ansari R, Rajabiehfard R, Arash B (2010a) Nonlocal finite element model for vibrations of embedded multi-layered graphene sheets. Comput Mater Sci 49(4):831–838
Ansari R, Sahmani S, Arash B (2010b) Nonlocal plate model for free vibrations of single-layered graphene sheets. Phys Lett A 375(1):53–62
Ansari R, Arash B, Rouhi H (2011) Vibration characteristics of embedded multi-layered graphene sheets with different boundary conditions via nonlocal elasticity. Compos Struct 93(9):2419–2429
Antonelli GA, Maris HJ, Malhotra SG, Harper JME (2002) Picosecond ultrasonics study of the vibrational modes of a nanostructure. J Appl Phys 91(5):3261–3267
Arash B, Ansari R (2010) Evaluation of nonlocal parameter in the vibrations of single-walled carbon nanotubes with initial strain. Phys E 42(8):2058–2064
Arash B, Wang Q (2011) Vibration of single- and double-layered graphene sheets. J Nanotechnol Eng Med 2(1):011012–011017
Arash B, Wang Q (2012) A review on the application of nonlocal elastic models in modeling of carbon nanotubes and graphenes. Comput Mater Sci 51(1):303–313
Arash B, Wang Q, Liew KM (2012) Wave propagation in graphene sheets with nonlocal elastic theory via finite element formulation. Comput Methods Appl Mech Eng 223–224:1–9
Aydogdu M (2009a) Axial vibration of the nanorods with the nonlocal continuum rod model. Physica E 41(5):861–864
Aydogdu M (2009b) A general nonlocal beam theory: Its application to nanobeam bending, buckling and vibration. Phys E 41(9):1651–1655
Aydogdu M, Filiz S (2011) Modeling carbon nanotube-based mass sensors using axial vibration and nonlocal elasticity. Physica E 43(6):1229–1234
Behfar K, Naghdabadi R (2005) Nanoscale vibrational analysis of a multi-layered graphene sheet embedded in an elastic medium. Compos Sci Technol 65(7–8):1159–1164
Bodily BH, CTS (2003) Structural and equivalent continuum properties of single-walled car-bon nanotubes. Int J Mater Prod Technol 18(4–6):381–397
Brauns EB, Madaras ML, Coleman RS, Murphy CJ, Berg MA (2002) Complex local dynamics in DNA on the picosecond and nanosecond time scales. Phys Rev Lett 88(15):158101
Bunch JS, van der Zande AM, Verbridge SS, Frank IW, Tanenbaum DM, Parpia JM, Craighead HG, McEuen PL (2007) Electromechanical resonators from graphene sheets. Science 315(5811):490–493. doi:10.1126/science.1136836
ChasteJ EichlerA, MoserJ CeballosG, RuraliR BachtoldA (2012) A nanomechanical mass sensor with yoctogram resolution. Nat Nano 7(5):301–304
Chiu H-Y, Hung P, Postma HWC, Bockrath M (2008) Atomic-scale mass sensing using carbon nanotube resonators. Nano Lett 8(12):4342–4346. doi:10.1021/nl802181c
Duan WH, Wang CM, Zhang YY (2007) Calibration of nonlocal scaling effect parameter for free vibration of carbon nanotubes by molecular dynamics. J Appl Phys 101(2):024305–024307
Duan WH, Wang Q, Wang Q, Liew KM (2010) Modeling the instability of carbon nanotubes: from continuum mechanics to molecular dynamics. J Nanotechnol Eng Med 1(1):011001–011010
Duan WH, Gong K, Wang Q (2011) Controlling the formation of wrinkles in a single layer graphene sheet subjected to in-plane shear. Carbon 49(9):3107–3112
Eringen AC (1976) Nonlocal polar field models. Academic, New York
Eringen AC (1983) On differential equations of nonlocal elasticity and solutions of screw dislocation and surface waves. J Appl Phys 54(9):4703–4710
Falvo MR, Clary GJ, Taylor RM, Chi V, Brooks FP, Washburn S, Superfine R (1997) Bending and buckling of carbon nanotubes under large strain. Nature 389(6651):582–584
Fasolino A, Los JH, Katsnelson MI (2007) Intrinsic ripples in graphene. Nat Mater 6(11):858–861
Filiz S, Aydogdu M (2010) Axial vibration of carbon nanotube heterojunctions using nonlocal elasticity. Comput Mater Sci 49(3):619–627
Gao Y, Hao P (2009) Mechanical properties of monolayer graphene under tensile and compressive loading. Phys E 41(8):1561–1566
Gibson RF, Ayorinde EO, Wen Y-F (2007) Vibrations of carbon nanotubes and their composites: A review. Compos Sci Technol 67(1):1–28
Hao MJ, Guo XM, Wang Q (2010) Small-scale effect on torsional buckling of multi-walled carbon nanotubes. Eur J Mech A Solids 29(1):49–55
He XQ, Kitipornchai S, Liew KM (2005) Resonance analysis of multi-layered graphene sheets used as nanoscale resonators. Nanotechnology 16(10):2086
Heireche H, Tounsi A, Benzair A, Maachou M, Adda Bedia EA (2008) Sound wave propagation in single-walled carbon nanotubes using nonlocal elasticity. Physica E 40(8):2791–2799
Hernández E, Goze C, Bernier P, Rubio A (1998) Elastic properties of C and B_{x}C_{y}N_{z} composite nanotubes. Phys Rev Lett 80(20):4502–4505
Hu Y-G, Liew KM, Wang Q, He XQ, Yakobson BI (2008) Nonlocal shell model for elastic wave propagation in single- and double-walled carbon nanotubes. J Mech Phys Solids 56(12):3475–3485
Iijima S (1991) Helical microtubules of graphitic carbon. Nature 354(6348):56–58
Iijima S, Brabec C, Maiti A, Bernholc J (1996) Structural flexibility of carbon nanotubes. J Chem Phys 104(5):2089–2092
Khademolhosseini F, Rajapakse RKND, Nojeh A (2010) Torsional buckling of carbon nanotubes based on nonlocal elasticity shell models. Comput Mater Sci 48(4):736–742
Kiani K (2010) Longitudinal and transverse vibration of a single-walled carbon nanotube subjected to a moving nanoparticle accounting for both nonlocal and inertial effects. Phys E 42(9):2391–2401
Kiani K, Mehri B (2010) Assessment of nanotube structures under a moving nanoparticle using nonlocal beam theories. J Sound Vib 329(11):2241–2264
Kitipornchai S, He XQ, Liew KM (2005) Continuum model for the vibration of multilayered graphene sheets. Phys Rev B 72(7):075443
Krishnan A, Dujardin E, Ebbesen TW, Yianilos PN, Treacy MMJ (1998) Young’s modulus of single-walled nanotubes. Phys Rev B 58(20):14013–14019
Lau K-t GuC, Hui D (2006) A critical review on nanotube and nanotube/nanoclay related polymer composite materials. Compos B Eng 37(6):425–436
Lee H-L, Chang W-J (2009) Vibration analysis of a viscous-fluid-conveying single-walled carbon nanotube embedded in an elastic medium. Phys E 41(4):529–532
Lee H-L, Hsu J-C, Chang W-J (2010) Frequency shift of carbon-nanotube-based mass sensor using nonlocal elasticity theory. Nanoscale Res Lett 5(11):1774–1778. doi:10.1007/s11671-010-9709-8
Li C, Chou T-W (2003a) A structural mechanics approach for the analysis of carbon nanotubes. Int J Solids Struct 40(10):2487–2499
Li C, Chou T-W (2003b) Single-walled carbon nanotubes as ultrahigh frequency nanomechanical resonators. Physical Review B 68(7):073405
Li C, Chou T-W (2006) Elastic wave velocities in single-walled carbon nanotubes. Phys Rev B 73(24):245407
Li R, Kardomateas GA (2007a) Thermal buckling of multi-walled carbon nanotubes by nonlocal elasticity. J Appl Mech 74(3):399–405
Li R, Kardomateas GA (2007b) Vibration characteristics of multiwalled carbon nanotubes embedded in elastic media by a nonlocal elastic shell model. J Appl Mech 74(6):1087–1094
Liew KM, Wang Q (2007) Analysis of wave propagation in carbon nanotubes via elastic shell theories. Int J Eng Sci 45(2–8):227–241
Liew KM, Wong CH, He XQ, Tan MJ, Meguid SA (2004) Nanomechanics of single and multiwalled carbon nanotubes. Phys Rev B 69(11):115429
Liew KM, He XQ, Kitipornchai S (2006) Predicting nanovibration of multi-layered graphene sheets embedded in an elastic matrix. Acta Mater 54(16):4229–4236
Lu Q, Huang R (2009) Nonlinear mechanics of single-atomic-layer graphene sheets. Int J Appl Mech 01(03):443–467
Mohammadimehr M, Saidi AR, Ghorbanpour Arani A, Arefmanesh A, Han Q (2010) Torsional buckling of a DWCNT embedded on winkler and pasternak foundations using nonlocal theory. J Mech Sci Technol 24(6):1289–1299
Murmu T, Adhikari S (2010) Nonlocal effects in the longitudinal vibration of double-nanorod systems. Phys E 43(1):415–422
Murmu T, Pradhan SC (2009a) Buckling analysis of a single-walled carbon nanotube embedded in an elastic medium based on nonlocal elasticity and Timoshenko beam theory and using DQM. Phys E 41(7):1232–1239
Murmu T, Pradhan SC (2009b) Buckling of biaxially compressed orthotropic plates at small scales. Mech Res Commun 36(8):933–938
Murmu T, Pradhan SC (2009c) Thermo-mechanical vibration of a single-walled carbon nanotube embedded in an elastic medium based on nonlocal elasticity theory. Comput Mater Sci 46(4):854–859
Murmu T, Pradhan SC (2009d) Small-scale effect on the free in-plane vibration of nanoplates by nonlocal continuum model. Phys E 41(8):1628–1633
Narendar S, Gopalakrishnan S (2009) Nonlocal scale effects on wave propagation in multi-walled carbon nanotubes. Comput Mater Sci 47(2):526–538
Novoselov KS, Geim AK, Morozov SV, Jiang D, Zhang Y, Dubonos SV, Grigorieva IV, Firsov AA (2004) Electric field effect in atomically thin carbon films. Science 306(5696):666–669. doi:10.1126/science.1102896
Parnes R, Chiskis A (2002) Buckling of nano-fibre reinforced composites: a re-examination of elastic buckling. J Mech Phys Solids 50(4):855–879
Peddieson J, Buchanan GR, McNitt RP (2003) Application of nonlocal continuum models to nanotechnology. Int J Eng Sci 41(3–5):305–312
Pradhan SC (2009) Buckling of single layer graphene sheet based on nonlocal elasticity and higher order shear deformation theory. Phys Lett A 373(45):4182–4188
Pradhan SC, Kumar A (2010) Vibration analysis of orthotropic graphene sheets embedded in Pasternak elastic medium using nonlocal elasticity theory and differential quadrature method. Comput Mater Sci 50(1):239–245
Pradhan SC, Kumar A (2011a) Buckling analysis of single layered graphene sheet under biaxial compression using nonlocal elasticity theory and DQ method. J Comput Theory Nanosci 8(7):1325–1334
Pradhan SC, Kumar A (2011b) Vibration analysis of orthotropic graphene sheets using nonlocal elasticity theory and differential quadrature method. Compos Struct 93(2):774–779
Pradhan SC, Murmu T (2009) Small scale effect on the buckling of single-layered graphene sheets under biaxial compression via nonlocal continuum mechanics. Comput Mater Sci 47(1):268–274
Pradhan SC, Murmu T (2010a) Small scale effect on the buckling analysis of single-layered graphene sheet embedded in an elastic medium based on nonlocal plate theory. Phys E 42(5):1293–1301
Pradhan SC, Murmu T (2010b) Application of nonlocal elasticity and DQM in the flapwise bending vibration of a rotating nanocantilever. Phys E 42(7):1944–1949
Pradhan SC, Phadikar JK (2009) Nonlocal elasticity theory for vibration of nanoplates. J Sound Vib 325(1–2):206–223
Qian D, Wagner GJ, Liu WK, Yu M-F, Ruoff RS (2002) Mechanics of carbon nanotubes. Appl Mech Rev 55(6):495–533
Reddy JN (2007) Nonlocal theories for bending, buckling and vibration of beams. Int J Eng Sci 45(2–8):288–307
Sánchez-Portal D, Artacho E, Soler JM, Rubio A, Ordejón P (1999) Ab initio structural, elastic, and vibrational properties of carbon nanotubes. Phys Rev B 59(19):12678–12688
Schedin F, Geim AK, Morozov SV, Hill EW, Blake P, Katsnelson MI, Novoselov KS (2007) Detection of individual gas molecules adsorbed on graphene. Nat Mater 6(9):652–655
Shen H-S (2010a) Buckling and postbuckling of radially loaded microtubules by nonlocal shear deformable shell model. J Theor Biol 264(2):386–394
Shen H-S (2010b) Nonlocal shear deformable shell model for bending buckling of microtubules embedded in an elastic medium. Phys Lett A 374(39):4030–4039
Shen H-S, Zhang C-L (2010) Torsional buckling and postbuckling of double-walled carbon nanotubes by nonlocal shear deformable shell model. Compos Struct 92(5):1073–1084
Shen L, Shen H-S, Zhang C-L (2010) Nonlocal plate model for nonlinear vibration of single layer graphene sheets in thermal environments. Comput Mater Sci 48(3):680–685
Şimşek M (2010) Vibration analysis of a single-walled carbon nanotube under action of a moving harmonic load based on nonlocal elasticity theory. Physica E 43(1):182–191
Sirtori C (2002) Applied physics: bridge for the terahertz gap. Nature 417(6885):132–133
Soltani P, Taherian MM, Farshidianfar A (2010) Vibration and instability of a viscous-fluid-conveying single-walled carbon nanotube embedded in a visco-elastic medium. J Phys D Appl Phys 43(42):425401
Song J, Shen J, Li XF (2010) Effects of initial axial stress on waves propagating in carbon nanotubes using a generalized nonlocal model. Comput Mater Sci 49(3):518–523
Stankovich S, Dikin DA, Dommett GHB, Kohlhaas KM, Zimney EJ, Stach EA, Piner RD, Nguyen ST, Ruoff RS (2006) Graphene-based composite materials. Nature 442(7100):282–286
Sudak LJ (2003) Column buckling of multiwalled carbon nanotubes using nonlocal continuum mechanics. J Appl Phys 94(11):7281–7287
Sun C, Liu K (2007) Vibration of multi-walled carbon nanotubes with initial axial loading. Solid State Commun 143(4–5):202–207
Thostenson ET, Ren Z, Chou T-W (2001) Advances in the science and technology of carbon nanotubes and their composites: a review. Compos Sci Technol 61(13):1899–1912
Wagner HD, Lourie O, Feldman Y, Tenne R (1998) Stress-induced fragmentation of multiwall carbon nanotubes in a polymer matrix. Appl Phys Lett 72(2):188–190
Wang Q (2005) Wave propagation in carbon nanotubes via nonlocal continuum mechanics. J Appl Phys 98(12):124301–124306
Wang L (2009) Vibration and instability analysis of tubular nano- and micro-beams conveying fluid using nonlocal elastic theory. Phys E 41(10):1835–1840
Wang L, Hu H (2005) Flexural wave propagation in single-walled carbon nanotubes. Phys Rev B 71(19):195412
Wang Q, Liew KM (2007) Application of nonlocal continuum mechanics to static analysis of micro- and nano-structures. Phys Lett A 363(3):236–242
Wang Q, Varadan VK (2006a) Wave characteristics of carbon nanotubes. Int J Solids Struct 43(2):254–265
Wang Q, Varadan VK (2006b) Vibration of carbon nanotubes studied using nonlocal continuum mechanics. Smart Mater Struct 15(2):659
Wang Q, Varadan VK (2007) Application of nonlocal elastic shell theory in wave propagation analysis of carbon nanotubes. Smart Mater Struct 16(1):178
Wang Q, Wang CM (2007) The constitutive relation and small scale parameter of nonlocal continuum mechanics for modelling carbon nanotubes. Nanotechnology 18(7):075702
Wang X, Yang HK, Dong K (2005) Torsional buckling of multi-walled carbon nanotubes. Mater Sci Eng, A 404(1–2):314–322
Wang CM, Zhang YY, Sai Sudha R, Kitipornchai S (2006a) Buckling analysis of micro- and nano-rods/tubes based on nonlocal Timoshenko beam theory. J Phys D Appl Phys 39(17):3904
Wang Q, Varadan VK, Quek ST (2006b) Small scale effect on elastic buckling of carbon nanotubes with nonlocal continuum models. Phys Lett A 357(2):130–135
Wang Q, Zhou GY, Lin KC (2006c) Scale effect on wave propagation of double-walled carbon nanotubes. Int J Solids Struct 43(20):6071–6084
Wang CM, Zhang YY, He XQ (2007) Vibration of nonlocal Timoshenko beams. Nanotechnology 18(10):105401
Wang Y-Z, Li F-M, Kishimoto K (2010a) Scale effects on thermal buckling properties of carbon nanotube. Phys Lett A 374(48):4890–4893
Wang Y-Z, Li F-M, Kishimoto K (2010b) Wave propagation characteristics in fluid-conveying double-walled nanotubes with scale effects. Comput Mater Sci 48(2):413–418
Wang Y-Z, Li F-M, Kishimoto K (2010c) Scale effects on the longitudinal wave propagation in nanoplates. Phys E 42(5):1356–1360
Xie GQ, Han X, Liu GR, Long SY (2006) Effect of small size-scale on the radial buckling pressure of a simply supported multi-walled carbon nanotube. Smart Mater Struct 15(4):1143
Yakobson BI, Brabec CJ, Bernholc J (1996) Nanomechanics of carbon tubes: instabilities beyond linear response. Phys Rev Lett 76(14):2511–2514
Yakobson BI, Campbell MP, Brabec CJ, Bernholc J (1997) High strain rate fracture and C-chain unraveling in carbon nanotubes. Comput Mater Sci 8(4):341–348
Yan Y, Wang WQ, Zhang LX (2010) Nonlocal effect on axially compressed buckling of triple-walled carbon nanotubes under temperature field. Appl Math Model 34(11):3422–3429
Yang J, Jia XL, Kitipornchai S (2008) Pull-in instability of nano-switches using nonlocal elasticity theory. J Phys D Appl Phys 41(3):035103
Yang J, Ke LL, Kitipornchai S (2010) Nonlinear free vibration of single-walled carbon nanotubes using nonlocal Timoshenko beam theory. Phys E 42(5):1727–1735
Zhang YQ, Liu GR, Wang JS (2004) Small-scale effects on buckling of multiwalled carbon nanotubes under axial compression. Phys Rev B 70(20):205430
Zhang YQ, Liu GR, Xie XY (2005) Free transverse vibrations of double-walled carbon nanotubes using a theory of nonlocal elasticity. Phys Rev B 71(19):195404
Zhang YQ, Liu GR, Han X (2006) Effect of small length scale on elastic buckling of multi-walled carbon nanotubes under radial pressure. Phys Lett A 349(5):370–376
Zhang YY, Wang CM, Duan WH, Xiang Y, Zong Z (2009a) Assessment of continuum mechanics models in predicting buckling strains of single-walled carbon nanotubes. Nanotechnology 20(39):395707
Zhang YY, Wang CM, Tan VBC (2009b) Assessment of Timoshenko beam models for vibrational behavior of single-walled carbon nanotubes using molecular dynamics. Adv Appl Math Mech 1(1):89–106
Zhang Y, Wang CM, Challamel N (2010) Bending, buckling, and vibration of micro/nanobeams by hybrid nonlocal beam model. J Eng Mech 136(5):562–574
Zhen Y, Fang B (2010) Thermal–mechanical and nonlocal elastic vibration of single-walled carbon nanotubes conveying fluid. Comput Mater Sci 49(2):276–282
Acknowledgments
This research was undertaken, in part, thanks to funding from the Canada Research Chairs Program (CRC) and the National Science and Engineering Research Council (NSERC).
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2014 Springer International Publishing Switzerland
About this chapter
Cite this chapter
Arash, B., Wang, Q. (2014). A Review on the Application of Nonlocal Elastic Models in Modeling of Carbon Nanotubes and Graphenes. In: Tserpes, K., Silvestre, N. (eds) Modeling of Carbon Nanotubes, Graphene and their Composites. Springer Series in Materials Science, vol 188. Springer, Cham. https://doi.org/10.1007/978-3-319-01201-8_2
Download citation
DOI: https://doi.org/10.1007/978-3-319-01201-8_2
Published:
Publisher Name: Springer, Cham
Print ISBN: 978-3-319-01200-1
Online ISBN: 978-3-319-01201-8
eBook Packages: Physics and AstronomyPhysics and Astronomy (R0)