
Abstract
A low-cost interface circuit, suitable for both electrochemical and semiconductor sensors for gas detection, is described. The proposed solution offers a wide range of measurement, as well as high sampling rate, on the order of 25 ms, thus facilitating the monitoring of the sensor behavior in the presence of fast transients. The presented front end has a 3.3 V single-supply and a time-coded digital signal output; thus, it is suitable to be directly interfaced to, or integrated with, a microcontroller for the management of the measurement process. Experimental results, conducted using a discrete component prototype and sample resistors emulating the sensor, have shown a maximum linearity error in the estimation of the sensor current or resistance of about 5 % over a measurement range of seven decades, with a maximum measurement time of 25 ms. Further tests with real sensors have confirmed the capability of the front end of acquiring fast sensor transients, thus demonstrating the validity of the proposed approach.
Access provided by Autonomous University of Puebla. Download conference paper PDF
Similar content being viewed by others
Keywords
These keywords were added by machine and not by the authors. This process is experimental and the keywords may be updated as the learning algorithm improves.
1 Introduction
Chemical sensors for gas detection are used in several applications, such as air quality, home and work safety, and food quality control. When the detection of small concentrations of substances is required, electrochemical sensors are usually employed. Conversely, when the primary concern is the low cost, semiconductor gas sensors are generally used. In the former case, the quantity to measure is the current I s of the working electrode (WE) of the sensor, and in the latter, the sensor is modeled with a gas-dependent electrical resistor R s ; thus a resistance estimation is necessary. Due to the vast choice of sensors, the range of current I s or resistance R s to estimate is rather wide (usually 1 nA ÷ 1 mA for I s and 10 kΩ ÷ 10 GΩ for R s ). Low-cost sensor interface circuits for such a wide input range are usually based on multiple-range architectures [1], with the disadvantage of having complex calibration procedures. Alternative solutions are based on current-/resistance-to-time conversion [2], the main drawback of which is the long measurement time occurring with large resistance values, making such circuits not suitable when fast sensor transients need to be acquired and analyzed. In this paper, an innovative and fast-readout electronic interface circuit, able to be used with wide-range electrochemical as well as semiconductor gas sensors, is proposed. The simple architecture together with 3.3 V single-supply and digital signal output characteristics make the presented front end particularly suitable to be replicated for the use in sensor array applications and integrated in a single-chip solution, together with the digital stages for data acquisition and processing.
2 The Proposed Solution
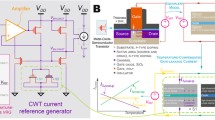
The proposed front end, based on the architecture in [3], is shown in Fig. 1a, whereas the timing diagram is reported in Fig. 1b. Connections with the sensor are displayed in Fig. 2a, b, related to an electrochemical and a resistive sensor, respectively.

(a) Scheme of the proposed interface circuit. (b) Time diagram of the circuit signals

The integration of the current I s produces a ramp V s , the slope α s of which depends on the I s value. A ramp V t , with a constant slope α t , opposite to α s , is used to capture the ramp V s and to generate the output signal V o , which is also used to reset the integrators and iterate the measurement.
The PulseGen block of Fig. 1a, shown in Fig. 2c, is a monostable circuit to generate, during the low-to-high commutation of V c , a positive pulse of V o long enough to assure a complete reset of the integrators Int s and Int t as in Fig. 1b.
The time T meas is related to the unknown quantities I s or R s by means of the relation in (1). The use of a moving threshold V t allows the measurement time T meas to be limited, particularly when small current or large resistance values (almost flat V s ramp) are under examination [4]. In this case, the maximum measurement time T meas,MAX is given by the relation in (2):
3 Experimental Results and Conclusions
The experimental validation of the proposed approach has been conducted by means of a discrete component prototype. Sample resistors from 1 kΩ to 10 GΩ in the configuration of Fig. 2a have been used to emulate resistive sensors; by assuring a resistor voltage drop of 1 V (referring to Figs. 1a and 2a, V cc = 3.3 V and V i = K s ∙V cc = 2.3 V), a current from 100 pA to 1 mA flows in the test resistor, thus emulating the electrochemical sensor output current. A digital counter (Agilent 53230A) has been employed for the measurement of T meas , and estimation of I s and R s has been computed by inverting, respectively, the second and third terms of the relation in (1). Results obtained with the aforementioned experimental setup are shown in Table 1, in terms of relative standard deviation σ Rel as well as of relative linearity error ε L,Rel (evaluated with the weighted least mean square line). The experimental results show a relative standard deviation less than 0.1 % and a relative linearity error below 5 % in the whole considered range (seven decades) for both I s and R s estimations [5].
The measuring time T meas spans across five decades (from hundreds of nanoseconds to about 25 ms), thus showing a time compression behavior with large sensor resistance (small sensor current) values which keeps the measurement time short. The power dissipation of the front end is less than 30 mW (at 3.3 V), and the cost of the realized prototype is less than 10 EUR, making it suitable for the use in low-cost and low-power gas detection systems.
A titanium dioxide MOX sensor has been used to test the capability of the proposed front end of acquiring fast sensor transients. To force such a sensor behavior, the heater voltage V h has been quickly changed from V h = 2 V (heater power P h ≈ 200 mW which corresponds to a sensor temperature of about 215 °C) to V h = 4 V (P h ≈ 560 mW which corresponds to about 440 °C). As visible in Fig. 3a, the sensor resistance has a fast drop of almost three decades in about 15 s. The transient detail in Fig. 3b shows how the presented front end has been able to accurately track the resistance variation, even in the presence of a large resistance value (sensor baseline around 1 GΩ) and fast resistance variation, thus demonstrating the effectiveness of the proposed approach.

(a) Fast thermal transient of a MOX sensor acquired of the proposed front end. (b) Detail of the sensor transient around the heater power variation
References
M. Baroncini, P. Placidi, G. C. Cardinali, A. Scorzoni. A simple interface circuit for micromachined gas sensors. Sens. Actuators A 109 (1–2), 131–136 (2003)
G. Ferri, C. Di Carlo, V. Stornelli, A. De Marcellis, A. Flammini, A. Depari, N. Jand. A single-chip integrated interfacing circuit for wide-range resistive gas sensor arrays. Sens. Actuators B 143 (1), 218–225 (2009).
A. Depari, A. Flammini, D. Marioli, S. Rosa, A. Taroni. A low-cost circuit for high-value resistive sensors varying over a wide range. IOP Meas. Sci. Tech. 17 (2), 353–358 (2006).
A. Depari, A. Flammini, D. Marioli, E. Sisinni, A. De Marcellis, G. Ferri, V. Stornelli. A New and Fast-Readout Interface for Resistive Chemical Sensors. IEEE Trans. Instr. Meas. 59 (5), 1276–1283 (2010).
A. Depari, A. Flammini. Flexible and low-cost interface circuit for electrochemical and resistive gas sensors. Proc. Eng. 47, 148–151 (2012).
Acknowledgments
The authors would like to thank Prof. Giorgio Sberveglieri and his staff for the technical and equipment support during the experimental tests.
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2014 Springer International Publishing Switzerland
About this paper
Cite this paper
Depari, A., Flammini, A., Sisinni, E. (2014). A Low-Cost Electronic Interface for Electrochemical and Semiconductor Gas Sensors. In: Di Natale, C., Ferrari, V., Ponzoni, A., Sberveglieri, G., Ferrari, M. (eds) Sensors and Microsystems. Lecture Notes in Electrical Engineering, vol 268. Springer, Cham. https://doi.org/10.1007/978-3-319-00684-0_73
Download citation
DOI: https://doi.org/10.1007/978-3-319-00684-0_73
Published:
Publisher Name: Springer, Cham
Print ISBN: 978-3-319-00683-3
Online ISBN: 978-3-319-00684-0
eBook Packages: EngineeringEngineering (R0)