
Abstract
In the paper an output synchronization problem for a networks of linear dynamical agents is examined based on passification method and recent results in graph theory. The static output feedback and adaptive control are proposed and sufficient conditions for synchronization are established ensuring synchronization of agents under incomplete measurements and incomplete control. The results are extended to the networks with sector bounded nonlinearities in the agent dynamics and information delays.
The work was supported by Russian Foundation for Basic Research (project 11-08-01218) and Russian Federal Program “Cadres” (contract 16.740.11.0042).
Access provided by Autonomous University of Puebla. Download conference paper PDF
Similar content being viewed by others


Keywords
1 Introduction
Controlled synchronization of networks has a broad area of important applications: control of power networks, cooperative control of mobile robots, control of lattices, control of biochemical, ecological networks, etc. [1–5]. However most existing papers deal with control of the networks of dynamical systems (agents) with full state measurements and full control (vectors of agent input, output and state have equal dimensions). In the case of synchronization by output feedback additional dynamical systems (observers) are incorporated into network controllers.
In this paper the synchronization problem for networks of linear agents with arbitrary numbers of inputs, outputs and states by static output neighbor-based feedback is solved based on passification method [6, 7] and recent results in graphs theory. The results are extended to the networks with sector bounded nonlinearities in the agent dynamics and information delays.
2 Problem Statement
Let the network S consist of d agents S i ,i=1,…,d. Each agent S i is modeled as a controlled system
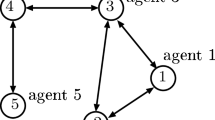
where \(x_{i}\in\mathbb{R}^{n}\) is a state vector, \(u_{i}\in\mathbb{R}^{1}\) is a controlling input (control), \(y_{i}\in\mathbb{R}^{l}\) is a vector of measurements (output). Let \(\mathcal{G}=(\mathcal{V},\mathcal{E})\) be the digraph with the set of vertices \(\mathcal{V}\) and the set of arcs \(\mathcal{E}\subseteq\mathcal{V}\times\mathcal{V}\) such that for i=1,…,d the vertex v i is associated with the agent S i .
Let the control goal be:
3 Static Control
Let control law for S i be
where \(K\in\mathbb{R}^{1\times l}\), \(\mathcal{N}_{i}=\{k=1,\ldots,d|(v_{i},v_{k})\in\mathcal{E}\}\) is the set of neighbor vertices to v i , τ≥0 is communication delay.
The problem is to find K from (119.3) such that the goal (119.2) holds.
The problem is first analyzed for linear agent dynamics (B 0=0) without delays (τ=0) under the following assumptions:
(A1) There exists a vector \(g\in\mathbb{R}^{l}\) such that the function \(g^{\rm T} W(s)\) is hyper-minimum-phase, where \(W(s)=C^{\rm T} (sI-A)^{-1}B\) . (Recall that the rational function χ(s)=β(s)/α(s) is called hyper minimum phase, if its numerator β(s) is a Hurwitz polynomial and its highest coefficient β n−1 is positive [7].)
(A2) The interconnection graph is undirected and connected.
(A2D) The interconnection graph is directed and has the directed spanning tree.
Let \(A(\mathcal{G})\) denote adjacency matrix of the graph \(\mathcal{G}\). For digraph \(\mathcal{G}\) consider the graph \(\mathcal{\widehat{G}}\) such that \(A(\widehat{\mathcal{G}})=A(\mathcal{G})+A(\mathcal{G})^{\rm T}\). Laplacian \(L(\mathcal{\widehat{G}})=D(\mathcal{\widehat{G}})-A(\mathcal{\widehat{G}})\) of the graph \(\mathcal{\widehat{G}}\) is symmetric and has the eigenvalues: 0=λ 1<λ 2≤⋯≤λ d , [1, 3]. The main result is as follows.
Theorem 119.1
Let assumptions A1 and either A2 or A2D hold and k≥2κ/λ 2, where
Then the control law (119.3) with feedback gain \(K=-k\cdot g^{\rm T}, k\in\mathbb{R}^{1}\) ensures the goal (119.2).
Similar results are obtained for undirected and balanced directed communication graphs.
4 Adaptive Control
Let agent S i be able to adjust its control gain, i. e. each local controller is adaptive. Let each controller have the following form:
where \(\theta_{i}(t)\in\mathbb{R}^{1\times l}\)—tunable parameter which is tuned based on the measurements from the neighbors of i-th agent.
Denote:
and consider the following adaptation algorithm:
Adaptive synchronization conditions are formulated as follows.
Theorem 119.2
Let assumptions A1, A2 hold. Then adaptive controller (119.5)–(119.6) ensures achievement of the goal (119.2).
The above results are extended to the networks with sector bounded nonlinearities in the agent dynamics and information delays.
5 Conclusions
The control algorithm for synchronization of networks based on static output feedback (119.3) to each agent from the neighbor agents is proposed. Since the number of inputs and outputs of the agents are less than the number of agent state variables, synchronization of agents is achieved under incomplete measurements and incomplete control. Synchronization conditions include passifiability (hyper-minimum-phase property) for each agent and some connectivity conditions for interconnection graph: existence of the directed spanning tree in case of directed graph and connectivity in case of undirected graph. Similar conditions are obtained for adaptive passification-based control of network with undirected interconnection graph, for sector bounded nonlinearities in the agent dynamics and information delays.
The proposed solution for output feedback synchronization unlike those of [4, 5] does not use observers. Compared to static output feedback result of [4, Theorem 4] the proposed synchronization conditions relax passivity condition for agents to their passifiability that allows for unstable agents. The paper [4], however, deals with time-varying network topology. The presented results extend our previous results [8–10].
Simulation results for the networks of double integrators and Chua circuits illustrate the theoretical results.
References
Olfati-Saber R, Murray RM (2004) Consensus problems in networks of agents with switching topology and time-delays. IEEE Trans Autom Control 49(9):1520–1533
Boccaletti S, Latora V, Moreno Y, Chavez M, Hwang DU (2006) Complex networks: structure and dynamics. Phys Rep 424(4–5):175–308
Bullo F, Cortez J, Martinez S (2009) Distributed control of robotic networks. Princeton University Press, Princeton
Scardovi L, Sepulchre R (2009) Synchronization in networks of identical linear systems. Automatica 45(11):2557–2562
Li Z, Duan Z, Chen G, Huang L (2010) Consensus of multiagent systems and synchronization of complex networks: a unified viewpoint. IEEE Trans Circuits Syst I 57(1):213–224
Fradkov AL, Miroshnik IV, Nikiforov VO (1999) Nonlinear and adaptive control of complex systems. Kluwer, Dordrecht
Fradkov AL (2003) Passification of nonsquare linear systems and feedback Yakubovich-Kalman-Popov lemma. Eur J Control 6:573–582
Fradkov AL, Junussov IA (2011) Output feedback synchronization for networks of linear agents. In: 7th European nonlinear dynamics conference (ENOC 2011), Rome
Dzhunusov IA, Fradkov AL (2011) Synchronization in networks of linear agents with output feedbacks. Autom Remote Control 72(8):1615–1626
Fradkov AL, Grigoriev GK, Selivanov AA (2011) Decentralized adaptive controller for synchronization of dynamical networks with delays and bounded disturbances. In: Proc 50th IEEE conf dec contr, Orlando, pp 1110–1115
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2013 Springer International Publishing Switzerland
About this paper
Cite this paper
Fradkov, A., Junussov, I., Selivanov, A. (2013). Passification Based Controlled Synchronization of Complex Networks. In: Gilbert, T., Kirkilionis, M., Nicolis, G. (eds) Proceedings of the European Conference on Complex Systems 2012. Springer Proceedings in Complexity. Springer, Cham. https://doi.org/10.1007/978-3-319-00395-5_119
Download citation
DOI: https://doi.org/10.1007/978-3-319-00395-5_119
Publisher Name: Springer, Cham
Print ISBN: 978-3-319-00394-8
Online ISBN: 978-3-319-00395-5
eBook Packages: Physics and AstronomyPhysics and Astronomy (R0)