
Abstract
The paper presents a comparison of selected methods of conflict analysis inspired by the Pawlak model. It examines a real-world case study, the 2020 presidential election in Poland. The study explores five distinct approaches to conflict analysis, drawing insights from this example. It highlights crucial distinctions among the models considered and provides recommendations within practical application contexts.
Access provided by Autonomous University of Puebla. Download conference paper PDF
Similar content being viewed by others

Keywords
1 Introduction
Conflict is a ubiquitous aspect of everyday life. Initially, conflicts were predominantly explored in human interactions, leading to extensive research conducted primarily within the social sciences [11]. However, the game theory broadened the scope of conflict analysis and negotiation, extending its influence into domains beyond the social sciences [12, 33]. The first works on conflicts from the perspective of Artificial Intelligence (AI) concerns the area of decision support systems that support people to better understand conflicts – finding the most conflicting issues or possible coalitions. Some tools for analyzing available information and suggesting the possible solutions were also proposed [7]. In recent times, conflict scenarios frequently involve intricate multi-agent systems, where we have the large number of interacting parties. Managing the numerous dependencies required to extract potential solutions manually is both impractical and non-scalable. Consequently, AI-powered conflict analysis and automated negotiation systems have become indispensable for large-scale systems. Despite the fact that these topics have been studied for more than a decade, there is still a wide range of problems that have not been proposed or discussed in the literature.
As a starting point of conflict analysis, the Pawlak conflict model presented in the papers [18, 22] is considered. The simple model based on rough set theory [19, 23] also gives great insight and understanding of any conflict. Anyway, the conclusions can be provided on the outermost level. In this paper, we describe the possible enhancements of the Pawlak model using a real political conviction conflict. The proposed enhancements allows to analyze possible coalitions and looks for consensus in negotiation process. The main goal of this paper is to review and compare selected methods of conflict analysis that are an extension of the Pawlak model and were inspired by this model. The areas of application of the discussed approaches and the key differences between the approaches are also identified. The paper is organized as follows. In the second section, an overview of the literature is presented. The third section introduces a real-world conflict scenario, along with the theoretical foundations of the analysis models and their application to the example. The fourth section compares results, discusses findings, and offers guidance on applying the analysis models. Finally, a summary is presented in the conclusion section.
2 Literature Review
The Pawlak conflict analysis model has inspired numerous researchers, leading to various extensions and approaches. For instance, Andrzej Skowron and Soma Dutta have focused on extensions designed for multi-agent systems [4, 5]. Another significant approach inspired by the Pawlak model is the three-way decisions theory [16, 31]. Because of restricting (in the Pawlak model) the agents values set to three (against, neutrality and favorable), the natural divisions of agents or issues into three parts can be introduced. This fits into the three-way decision theory proposed by Yao [32]. Following this approach, many researchers have studied conflict via trisecting agents, issues, and pairs of agents [6, 13, 14, 17] using different evaluation functions [6]. As an instance, in [14] the authors proposed the use of a pair of thresholds to define the relation of coalition, neutrality and conflict. The other way of agents and issues three-section has been proposed by Sun et al. in [30] – they explored the rough set upper and lower approximation concept for this purpose. This approach has been developed in [29] by proposing a conflict analysis decision model based on rough set theory over two universes.
Furthermore, interesting applications that consider hierarchies and constraints applicable to conflict situations were demonstrated by Jarosław Stepaniuk and Andrzej Skowron [28]. Additionally, there exist approaches grounded in rough set theory for multiple criteria decision analysis [2, 9]. Given the inherent high uncertainty and incomplete information associated with conflicts, rough set theory proves to be an excellent approach for such cases [10, 27]. Finally, these models have found practical implementations in real-world conflict analysis scenarios, including applications in the Chinese Wall Security Policy context [15] and water resources allocation decisions [8].
3 Conflict Analysis Models – Case Study
Professor Zdzisław Pawlak proposed the conflict analysis model in the eighties of the twentieth century [18, 20, 21]. The main idea of the model is to express the views of the agents involved in a conflict on certain conflicting issues using only three values, and to store this information using an information system. Information system is a pair \(S = (U, A)\), where U is the universe – the set of agents, A is a set of issues, and the set of values of \(a\in A\) is equal \(V^a=\{-1,0,1\}\). Opinion of agent \(x\in U\) about issue \(a\in A\) is the value a(x). The meaning of this value is as follows: \(a(x)=1\) means the agent x is in favor of the issue a; \(a(x)=0\) means the agent x is neutral to the issue a; \(a(x)=-1\) means the agent x is against to the issue a. In order to calculate the intensity of conflict between agents, two functions were proposed [18]. A function of distance between agents \(\rho ^*_B: U\times U\rightarrow [0,1]\) for the set of issues \(B\subseteq A\) is defined as follows: \(\rho ^*_B(x_1,x_2)=\frac{\sum _{a\in B}\phi ^*_a(x_1,x_2)}{card\{B\}},\) where
A conflict function \(\rho _B: U\times U\rightarrow [0,1]\) for the set of issues \(B\subseteq A\) is defined as follows:
where \(\delta _B(x_1,x_2)=\{a\in B: a(x_1)\not =a(x_2)\}.\) When the attribute set for calculating either of the two functions matches the full attribute set (\(B=A\)), we abbreviate it as \(\rho ^*\) or \(\rho \). These functions differ in how they handle agent neutrality. The distance function is more precise; if one agent in a pair is neutral, the difference between the agents equals 0.5. In contrast, the conflict function, regardless of neutrality, increments the counter to 1 for any differences in assigned values on a conflict issue between a pair of agents.
In the Pawlak model, a pair of agents \(x_1, x_2 \in U\) is said to be allied \(R^+(x_1,x_2)\), if \(\rho ^*(x_1,x_2)<0.5\) (or \(\rho (x_1,x_2)<0.5)\), in conflict \(R^-(x_1,x_2)\), if \(\rho ^*(x_1,x_2)>0.5\) (or \(\rho (x_1,x_2)>0.5\)), neutral \(R^0(x_1,x_2)\), if \(\rho ^*(x_1,x_2)=0.5\) (or \(\rho (x_1,x_2)=0.5\)). Set \(X\subseteq U\) is a coalition if for every \(x_1,x_2\in X\), \(R^+(x_1,x_2)\). The resulting coalitions are not necessarily disjoint sets, reflecting the possibility for an agent to participate in multiple coalitions due to moderate views compatible with multiple fractions.
Conflicts and decision-making are ubiquitous in nearly every aspect of our lives. This paper explores a conflict scenario within the realm of politics, specifically drawing on a real-life case from the 2020 presidential election in Poland. Consider the following example, named the “political conviction conflict”. This example is derived from the Voting Lighthouse application, a product of the Center for Civic Education developed under Project No. POWR.03.01.00-00-T065/18, titled “Social and Civic Activation of Young People in the Development of Key Competencies” [1]. In this example, we have nine agents represented as \(U=\{x_1, \ldots , x_9\}\) – these agents are the candidates in the presidential election: \(x_1\) – Krzysztof Bosak; \(x_2\) – Marek Jakubiak; \(x_3\) – Mirosław Piotrowski; \(x_4\) – Paweł Tanajno; \(x_5\) – Robert Biedroń; \(x_6\) – Stanisław Żółtek; \(x_7\) – Szymon Hołownia; \(x_8\) – Waldemar Witkowski; \(x_9\) – Władysław Kosiniak-Kamysz; (two candidates in this election are missing, as in the Voting Lighthouse application there are no opinions for them) and twenty five issues \(A=\{a_1, \ldots , a_{25}\}\): \(a_1\) – Declare an emergency state in coronavirus-like situations; \(a_2\) – Grant educational institutions more curriculum autonomy; \(a_3\) – Prioritize elevating national identity in cultural policies; \(a_4\) – Fund public media from the state budget; \(a_5\) – Broaden abortion legality; \(a_6\) – Reserve marriage for heterosexual couples; \(a_7\) – Reduce church hierarchy influence in public affairs; \(a_8\) – Consider easier firearm access; \(a_9\) – Transition from coal by 2035; \(a_{10}\) – Pursue a nuclear plant in Poland; \(a_{11}\) – Allow raising animals for fur; \(a_{12}\) – Tax digital giants targeting Polish users; \(a_{13}\) – Raise taxes for high-income earners; \(a_{14}\) – Enable Swiss franc loan conversion at original cost; \(a_{15}\) – Expand President’s defense policy authority; \(a_{16}\) – Strengthen judiciary independence; \(a_{17}\) – Broaden local government jurisdiction; \(a_{18}\) – Fund public housing instead of private rental subsidies; \(a_{19}\) – Establish early retirement for experienced workers; \(a_{20}\) – Significantly raise the minimum wage; \(a_{21}\) – Allow higher standard medical services payments; \(a_{22}\) – Reduce EU influence on Polish domestic policies; \(a_{23}\) – Prioritize the United States as Poland’s foreign partner; \(a_{24}\) – Increase defense spending; \(a_{25}\) – Accept more labor migrants from other nations.
The views of each agent to a specific issue is presented in Table 1, where, according to the Pawlak model of conflict analysis, 1 means agree, 0 have no opinion, \(-1\) disagree.
3.1 Conflict Analysis Using the Pawlak Model and the Distance Function
In the initial approach, we apply the Pawlak model with a distance function for conflict analysis, as discussed in [22]. We compute the distance function between agent pairs, resulting in a symmetrical matrix presented in Table 2, with zeros on the diagonal.
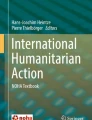
Figure 1 shows a graphical representation of the conflict situation. Agents are represented by circles in the figure. When agents are allied (\(\rho ^*(x,y)<0.5\)), the circles representing the agents are linked. In order to find coalitions, all cliques should be identified in the graph. So the subset of vertices such that every two vertices are linked is determined. There are seven coalitions in the example \(\{x_1, x_2, x_3, x_6, x_9\}\), \(\{x_1, x_2, x_4, x_6, x_9\}\), \(\{x_1, x_3, x_6, x_7\}\), \(\{x_4, x_6, x_8, x_9\}\), \(\{x_6, x_7, x_8\}\), \(\{x_5, x_7, x_8\}\) and \(\{x_5, x_8, x_9\}\). As can be seen, coalitions are non-disjoint sets. Some agents show alliance with almost all other agents. As can be seen candidates Władysław Kosiniak-Kamysz and Stanisław Żółtek are in an alliance relation with virtually all other candidates for president.
As was mentioned earlier, the conflict function assigns smaller values for a pair of agents if one of the agents is neutral. In some real cases, this generates too many coalitions – based on this, no clear division can be defined.

A graphical representation of the political conviction conflict, the Pawlak conflict analysis model and the distance function
3.2 Conflict Analysis Using the Pawlak Model and the Conflict Function
Another way to analyze conflicts using the Pawlak approach is to use the conflict function which is described in paper [18] and defined by Formula 2. The value of the conflict function between agents is calculated for each pair of agents and are given in Table 3.
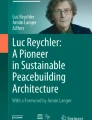
Figure 2 shows a graphical representation of the conflict situation. The way of preparing the graph and determining the coalition is the same as before. There are five coalitions in the example \(\{x_1, x_2, x_3, x_6, x_9\}\), \(\{x_2, x_4, x_6, x_9\}\), \(\{x_3, x_6, x_7\}\), \(\{x_5, x_7, x_8\}\), \(\{x_5, x_8, x_9\}\). As before, coalitions are non-disjoint sets, but here, there are fewer of them. The conflict function treats neutrality as equivalent to differing opinions among agents. Compared to the previous analysis, some agents now belong to a smaller number of coalitions. This results from a more restrictive treatment of their neutrality, potentially seen as a penalty, as it is considered as different opinion from both proponents and opponents of an issue.

A graphical representation of the political conviction conflict, the Pawlak conflict analysis model and the conflict function
3.3 Conflict Analysis Using Hierarchical Clustering for Determining Disjoint Clusters
Another approach was presented in paper [25] and consists in combination of the Pawlak approach with an agglomerative hierarchical clustering algorithm. The major difference now is that coalitions are disjoint sets, and the method to generate coalitions relies on iteratively combining the agents with the smallest distance into groups. The agglomerative hierarchical algorithm is implemented based of the conflict function value matrix. Initially, each agent is treated as a separate cluster. Coalitions are generated iteratively as follows:
-
1.
One pair of different clusters is selected for which the conflict function reaches a minimum value. If the selected value is less than 0.5, then agents from the selected pair of clusters are combined into one new cluster. Otherwise, the clustering process is terminated.
-
2.
After defining a new cluster, the value of the distance between the clusters is recalculated. The following method for recalculating the value of the distance is used. Let \(\hat{\rho }: 2^{U}\times 2^{U}\rightarrow [0,1]\), where \(\hat{\rho }(\{x_1\},\{x_2\})=\rho (x_1,x_2)\) for each \(x_1,x_2\in U\) and let \(C_i\) be a cluster formed from the merger of two clusters \(C_i=C_{i,1}\cup C_{i,2}\) and let it be given a cluster \(C_j\) then
$$\begin{aligned} \hat{\rho }(C_i, C_j)=\left\{ \begin{array}{ll} \frac{\hat{\rho }(C_{i,1},C_j)+\hat{\rho }(C_{i,2},C_j)}{2} &{}\text { if } \hat{\rho }(C_{i,1},C_j)<0.5\\ {} &{} \text { and } \hat{\rho }(C_{i,2},C_j)<0.5\\ &{}\\ \max \{\hat{\rho }(C_{i,1},C_j),\hat{\rho }(C_{i,2},C_j)\} &{}\text { if } \hat{\rho }(C_{i,1},C_j)\ge 0.5\\ {} &{} \text { or } \hat{\rho }(C_{i,2},C_j)\ge 0.5\end{array}\right. \end{aligned}$$(3)
In Formula 3, the second equation ensures that agents in conflict relations are excluded from a single coalition. Relying solely on the first equation might lead to a scenario where for two values – one exceeding 0.5 and the other falling below 0.5 – the average could be less than 0.5. Subsequently, this could result that agents in conflict relations being included in one coalition in subsequent steps.
Table 3 shows the values of the conflict function between agents in the considered political conviction conflict. In the first step, we select a pair of agents for which the conflict function takes the smallest value. This will be \(\rho (x_6,x_1)=0.24\). Then we combine these agents into a cluster and recalculate the distances between a new cluster and other agents according to Formula 3. Distance function values recalculated according to the proposed method are proposed in Table 4. For example, the value of the conflict function for the pair \(\{x_1,x_6\}\) and \(\{x_2\}\) was calculated as follows
\(\hat{\rho }(\{x_1,x_6\},\{x_2\})=\frac{\hat{\rho }(\{x_1\},\{x_2\})+\hat{\rho }(\{x_6\},\{x_2\})}{2}=\frac{0.36+0.32}{2}=0.34\)
We use this formula because both values of the conflict function \(\hat{\rho }(\{x_1\},\{x_2\})\) and \(\hat{\rho }(\{x_6\},\{x_2\})\) are less than 0.5.
The remaining steps of the agglomerative hierarchical clustering follow a similar approach. The realization of the whole process is presented as a dendrogram in Fig. 3. We end the clustering process when all \(\hat{\rho }\) function values are greater or equal to 0.5. This results in three distinct coalitions: \(\{x_1, x_2, x_3, x_6\}\), \(\{x_5, x_7, x_8\}\), \(\{x_4, x_9\}\). Consequently, each presidential candidate now belongs to a single coalition, eliminating one-element isolated points among the candidates.

Dendrogram – the implementation of agglomerative hierarchical clustering algorithm
3.4 Conflict Analysis Using Negotiations Stage
The approach discussed in this section was proposed in paper [24]. It consists of two stages, defining initial coalitions and considering neutral agents. The first stage is very similar to the Pawlak model, only the way of defining the relations between the agents changes. Let p be a real number that belongs to the interval (0, 0.5). We say that agents \(x_1, x_2 \in U\) are allied \(R^+(x_1,x_2)\), if and only if \(\rho (x_1,x_2)<0.5-p\). Agents \(x_1, x_2 \in U\) are in a conflict \(R^-(x_1, x_2)\), if and only if \(\rho (x_1, x_2)> 0.5+p\). Agents \(x_1, x_2 \in U\) are neutral \(R^0(x_1,x_2)\), if and only if \(0.5-p\le \rho (x_1,x_2)\le 0.5+p\).
In the second stage of this approach, in addition to agents’ opinions on the conflict issues, it is vital to identify their top-priority conflict issues. Let us assume that the most important issues for the agents are as follows: \(a_5\), \(a_7\), \(a_9\) for agent \(x_1\); \(a_3\), \(a_5\), \(a_9\) for \(x_2\); \(a_5\), \(a_7\), \(a_8\) for \(x_3\); \(a_1\), \(a_4\), \(a_9\) for \(x_4\); \(a_3\), \(a_6\), \(a_8\) for \(x_5\); \(a_4\), \(a_5\), \(a_7\) for \(x_6\); \(a_3\), \(a_5\), \(a_8\) for \(x_7\); \(a_3\), \(a_8\), \(a_9\) for \(x_8\); \(a_4\), \(a_5\), \(a_8\) for \(x_9\). This data is not available in the Voting Lighthouse application [1], it was assigned by the authors of the article. Let us also set p at 0.1. Consequently, any pair of agents with conflict function values belongs to the [0.4, 0.6] range is considered neutral. Therefore, only agent pairs with conflict function values below 0.4 form alliances. Figure 4, generated using the data in Table 3, illustrates these alliances with connecting lines.

A graphical representation of the political conviction conflict, conflict analysis with negotiations stage
The initial coalitions are all complete subgraphs depicted in Fig. 4: \(\{x_1, x_3,\) \(x_6\}\), \(\{x_2, x_6\}\), \(\{x_4, x_9\}\), \(\{x_6, x_9\}\), \(\{x_5, x_7\}\). In the next step of the algorithm, only agents that have not been included in any initial coalition and those that are not in conflict are considered (not in conflict means \(\rho (x_i, x_j) \le 0.6\) for \(x_i,x_j\in U\)). For these agents, we determine the values of a generalized distance function \(\phi _G\). It is a function \(\phi _G: U\times U\rightarrow [0,\infty )\) where
\(\phi _G(x_i,x_j)=\frac{\sum _{a\in Sign_{i,j}}|a(x_i)-a(x_j)|}{card\{Sign_{i,j}\}}\)
where \(x_i, x_j\in U\) and \(Sign_{i,j}\subseteq A\) is the set of significant conflicting issues for the pair of agents \(x_i\), \(x_j\). In the set \(Sign_{i,j}\) there are issues, which are the most significant for agents \(x_i\) or \(x_j\). Thus, for the pair of agents the average module of difference of opinion on issues that are significant for these agents is calculated. These values are shown in Table 5. In the considered example, only agent \(x_8\) does not belong to any initial coalition. If a conflict occurs between the two agents, then the corresponding cell in Table 5 contains the sign X.
During the second stage of the cluster creating process, the negotiation process and the intensity of the conflict between the two groups of agents is determined by using the generalized distance. We define the generalized distance between agents \(\rho _G: 2^{U}\times 2^{U}\rightarrow [0,\infty )\)
where \(X, Y\subseteq U\). The value of the generalized conflict function between the initial clusters and agent \(x_8\) are calculated as follows
\(\rho ^x_G(\{x_4, x_9\}, \{x_8\})=\frac{\phi ^x_G(x_4,x_8)+\phi ^x_G(x_9,x_8)+\phi ^x_G(x_4,x_9)}{3}=1.0(6)\)
\(\rho ^x_G(\{x_6, x_9\}, \{x_8\})=\frac{\phi ^x_G(x_6,x_8)+\phi ^x_G(x_9,x_8)+\phi ^x_G(x_6,x_9)}{3}=1.1(6)\)
\(\rho ^x_G(\{x_5, x_7\}, \{x_8\})=\frac{\phi ^x_G(x_5,x_8)+\phi ^x_G(x_7,x_8)+\phi ^x_G(x_5,x_7)}{3}=1\)
We combine agents whose generalized distance doesn’t exceed a user-defined threshold, typically set at 2 as in [24]. Agent \(x_8\) is combined with all previously mentioned initial coalitions, resulting in these final sets: \(\{x_1,x_3,x_6\}\), \(\{x_2,x_6\}\), \(\{x_4,x_8,x_9\}\), \(\{x_6,x_8,x_9\}\) and \(\{x_5,x_7,x_8\}\). This approach yields larger coalitions compared to agglomerative hierarchical clustering but smaller than the classic Pawlak model. To implement this method, we require additional information: each agent’s critical issues.
3.5 Consensus Model
The final goal of analysis of any conflict is to propose the solution i.e. the consensus. Consensus is the situation which is acceptable by all the agents taking part in the conflict. Analyzing the Table 2 it can be easily noticed that such situation in the discussed political conviction conflict does not exist for an acceptable value of the distance function (here the threshold is set to 0.5).
On the other hand, there are many real examples where the consensus is found, usually within the negotiation process. In the papers [3, 26] the enhancements of the Pawlak model have been proposed to embrace the background knowledge of the conflict and allows to search for solution (acceptable situation) not visible in information table describing the conflict.
Local States. We assume [3, 26] that each agent has its information table with local states defining its current view as well as preferences i.e. \(I_x=(U_x, A_x)\), where \(a: U_x\rightarrow V_{a}\) for any \(a\in A_x\) and \(V_a\) is the value set of attribute a, \(A_x\) is the set of attributes and \(U_x\) is the set of local states of the agent x. Any local state \(s\in U_x\) is fully described by the information vector \(Inf_{A_x}(s)={(a,a(s)):s\in U_x}\). We assume that sets \(\{A_x\}\) are pairwise disjoint, i.e. \(\{A_x\cap A_y=\emptyset \}\) where x and y denotes different agents. The user preferences are expressed by assigning the subjective evaluation to each state. Let \(e_x: U_x\rightarrow R[0,1]\) is the target function, then the states with greater value of \(e_x\) are assumed to be more preferred.
In discussed political conviction conflict the information about agents preferences is missing. However, it is quite common that after elections parties are creating coalitions and agreeing their views (there are issues they care about more than others). For illustrative purposes, we generated the local states for each agent by changing the view for two attributes randomly. To each of the local states, we assign the value of subjective evaluation. The exemplar local state decision table for agent \(x_1\) is present in Table 6.
The best way to approximate the agent preferences is to infer the rules from the local state decision table. We are generating the minimal rules in the number of attributes from the left side. The set of rules forms the formula describing acceptable states of the given agent \(f_{s_x}\).
The exemplar rules for agent \(x_1\) preferred states are as follow: (\(a_4=0 \wedge a_3=1\)). The threshold for the target function is set to \(e_x=\frac{1}{3}\).
Constraints. Additionally, to understand the root cause of the conflict and to find a consensus easier, some constraints can be specified. Constraints describe the dependencies among the local states of agents. They can come from the resources limitation or just specify something crucial from the agent’s perspective. We assume that finally the constrains are delivered in the form of propositional formula here denoted by \(f_C\). The example for agent \(x_5\) could be as follow: (\(a_9=1 \wedge a_{10}=1\)), which is interpreted that for \(x_5\) it is vital to build the nuclear plant to move away from coal.
Situations. The situation [3, 26] in the conflict is any element of the cartesian product \(S(U)=\prod _{i=1}^n{INF(x_i)}\), where \(n=card(U)\), is the number of agents taking part in the conflict and INF(x) is the set of all possible information vectors of agent x. The situation corresponding to the global state \(\bar{s} = (s_1,...,s_n)\in U_{x_1}\times ... \times U_{x_n}\) is defined by (\(Inf_{x_1}(s_1),...,Inf_{x_n}(s_n)\)).
Similar to local states, we assume the situation can be evaluated too. The main idea lies in belief that the stable solution is obtained when the common good is considered. The situation evaluation q(S) can be given by the expert like the negotiator or independent organization. Based on the given threshold \(q(S)\ge q_t\) we define the set of situations by prepositional formula \(f_S\) obtained by inferring the rules from the decision table corresponding to the information table of situations S(U). Another way to evaluate the situations is by applying the agents local state evaluation in the calculation, i.e. the global state evaluation can be defined by \(p(\bar{s})=F(e_{x_1},...,e_{x_n})\), where F is a suitable function e.g. \(F(r_1,...,r_m)=\sum _{i=1}^m{r_i}\).
Consensus. The described model above with user preferences, situations evaluation and constraints forms the basis to efficiently search for consensus. Consensus is the set of situations that satisfies the boolean formula \(f=\bigwedge _{x\in U}f_{s_x}\wedge f_C\wedge f_S\).
The information gathered in political conviction conflict is not enough to fully present the concepts within the presented model. We augment the information with local states and their evaluation as described in Subsect. 3.5. Also, the assumption that agents are locally using different set of attributes seems to be difficult to achieve. In reality the conflicting parties are often using different wording even when the overall meaning is similar. To match our model and available information in political conviction conflict we add the following constraints: \(\forall _{x,y\in U}\forall _{a_x\in A_x,a_y\in A_y}{a_x=a_y}\). That means the set of agents attributes is the same. When assuming the situation is evaluated based on agents local states evaluation, we can simplify our consensus problem, for political conviction example, to the formula \(f=\bigwedge _{x\in U}f_{s_x}\). Also we are not taking into account any constraints.
Continuing the experiment with political conviction conflict, we obtained the descriptions of preferable states for exemplar as presented in Table 7.
Computing the formula f, it can be noticed that acceptable situation cannot be found. However, we can propose such situations for limited number of agents. For example when excluding agents \(x_6\), \(x_7\), and \(x_9\) the acceptable situations are described by the formula: \((a_{1}= -1)\wedge (a_2=-1)\wedge (a_3=1)\wedge (a_{6}=-1)\wedge (a_{19}=0)\wedge (a_{23}=0)\). Note that the solution (consensus) can be found among the situations not considered in the conflict description.
4 Comparison and Application Areas
We compare the discussed approaches and highlight their application domains. Notably, the outcomes from these models differ. The target of the approaches from Sects. 3.1, 3.2, 3.3 and 3.4 is assessing agents’ alignment and forming consistent coalitions, while the model described in Sect. 3.5 seeks consensus within set constraints and preferences. Table 8 summarizes key model characteristics, necessary input data, suggested application domains and evidence for these conclusions.
5 Conclusions
The paper presented an overview of selected conflict analysis methods based on the Pawlak model. A real-life example concerning the presidential election in 2020 in Poland was discussed. Coalitions of presidential candidates using different approaches were generated. The study conducted a comparative evaluation of the conflict analysis models in terms of their features and prerequisites. The paper illuminates noteworthy distinctions among the discussed conflict analysis methods and highlights their respective areas of application.
References
(CCE) The Center for Citizenship Education: Voting Lighthouse application. https://latarnikwyborczy.pl/
Cinelli, M., Kadziński, M., Gonzalez, M., Słowiński, R.: How to support the application of multiple criteria decision analysis? Let us start with a comprehensive taxonomy. Omega 96, 102261 (2020)
Deja, R.: Conflict analysis. Int. J. Intell. Syst. 17(2), 235–253 (2002)
Dutta, S., Skowron, A.: Interactive granular computing model for intelligent systems. In: Shi, Z., Chakraborty, M., Kar, S. (eds.) ICIS 2021. IAICT, vol. 623, pp. 37–48. Springer, Cham (2021). https://doi.org/10.1007/978-3-030-74826-5_4
Dutta, S., Skowron, A.: Toward a computing model dealing with complex phenomena: interactive granular computing. In: Nguyen, N.T., Iliadis, L., Maglogiannis, I., Trawiński, B. (eds.) ICCCI 2021. LNCS (LNAI), vol. 12876, pp. 199–214. Springer, Cham (2021). https://doi.org/10.1007/978-3-030-88081-1_15
Fan, Y., Qi, J., Wei, L.: A conflict analysis model based on three-way decisions. In: Nguyen, H.S., Ha, Q.-T., Li, T., Przybyła-Kasperek, M. (eds.) IJCRS 2018. LNCS (LNAI), vol. 11103, pp. 522–532. Springer, Cham (2018). https://doi.org/10.1007/978-3-319-99368-3_41
Giordano, R., Passarella, G., Uricchio, V., Vurro, M.: Integrating conflict analysis and consensus reaching in a decision support system for water resource management. J. Environ. Manage. 84(2), 213–228 (2007)
Gong, Z.T., Sun, B.Z., Xu, Z.M., Zhang, Z.Q.: The rough set analysis approach to water resources allocation decision in the inland river basin of arid regions (ii): The conflict analysis of satisfactions of the decision. In: 2006 International Conference on Machine Learning and Cybernetics, pp. 1358–1361. IEEE (2006)
Greco, S., Matarazzo, B., Slowinski, R.: Rough sets theory for multicriteria decision analysis. Eur. J. Oper. Res. 129(1), 1–47 (2001)
Han, X., Dleu, T., Nguyen, L., Xu, H.: Conflict analysis based on rough set in e-commerce. Int. J. Adv. Manag. Sci. 2(1), 1–8 (2013)
Helmold, M., Dathe, T., Hummel, F., et al.: Successful Negotiations. Springer, Heidelberg (2022). https://doi.org/10.1007/978-3-658-35701-6
Hipel, K.W., Fang, L., Kilgour, D.M.: The graph model for conflict resolution: reflections on three decades of development. Group Decis. Negot. 29, 11–60 (2020)
Lang, G., Luo, J., Yao, Y.: Three-way conflict analysis: a unification of models based on rough sets and formal concept analysis. Knowl. Based. Syst. 194, 105556 (2020)
Lang, G., Miao, D., Cai, M.: Three-way decision approaches to conflict analysis using decision-theoretic rough set theory. Inf. Sci. 406, 185–207 (2017)
Lin, T.Y.: Granular computing on binary relations analysis of conflict and Chinese wall security policy. In: Alpigini, J.J., Peters, J.F., Skowron, A., Zhong, N. (eds.) RSCTC 2002. LNCS (LNAI), vol. 2475, pp. 296–299. Springer, Heidelberg (2002). https://doi.org/10.1007/3-540-45813-1_38
Liu, D., Liang, D., Wang, C.: A novel three-way decision model based on incomplete information system. Knowl. Based. Syst. 91, 32–45 (2016)
Luo, J., Hu, M., Lang, G., Yang, X., Qin, K.: Three-way conflict analysis based on alliance and conflict functions. Inf. Sci. 594, 322–359 (2022)
Pawlak, Z.: An inquiry into anatomy of conflicts. Inf. Sci. 109(1–4), 65–78 (1998)
Pawlak, Z.: Rough sets. Int. J. Comput. Inf. Sci. 11, 341–356 (1982)
Pawlak, Z.: On conflicts. Int. J. Man-Mach. Stud. 21(2), 127–134 (1984)
Pawlak, Z.: Anatomy of conflics. Bull. EATCS 50, 234–246 (1993)
Pawlak, Z.: Some remarks on conflict analysis. Eur. J. Oper. Res. 166(3), 649–654 (2005)
Pawlak, Z., Skowron, A.: Rudiments of rough sets. Inf. Sci. 177(1), 3–27 (2007)
Przybyła-Kasperek, M., Wakulicz-Deja, A.: A dispersed decision-making system-the use of negotiations during the dynamic generation of a system’s structure. Inf. Sci. 288, 194–219 (2014)
Przybyła-Kasperek, M., Wakulicz-Deja, A.: Global decision-making system with dynamically generated clusters. Inf. Sci. 270, 172–191 (2014)
Skowron, A., Deja, R.: On some conflict models and conflict resolutions. Roman. J. Inf. Sci. Technol. 3(1–2), 69–82 (2002)
Skowron, A., Ramanna, S., Peters, J.F.: Conflict analysis and information systems: a rough set approach. In: Wang, G.-Y., Peters, J.F., Skowron, A., Yao, Y. (eds.) RSKT 2006. LNCS (LNAI), vol. 4062, pp. 233–240. Springer, Heidelberg (2006). https://doi.org/10.1007/11795131_34
Stepaniuk, J., Skowron, A.: Three-way approximation of decision granules based on the rough set approach. Int. J. Approximate Reasoning 155, 1–16 (2023)
Sun, B., Chen, X., Zhang, L., Ma, W.: Three-way decision making approach to conflict analysis and resolution using probabilistic rough set over two universes. Inf. Sci. 507, 809–822 (2020)
Sun, B., Ma, W., Zhao, H.: Rough set-based conflict analysis model and method over two universes. Inf. Sci. 372, 111–125 (2016)
Yao, J., Medina, J., Zhang, Y., Ślȩzak, D.: Formal concept analysis, rough sets, and three-way decisions (2022)
Yao, Y.: Three-way decisions with probabilistic rough sets. Inf. Sci. 180(3), 341–353 (2010)
Zeng, Y., Li, J., Cai, Y., Tan, Q., Dai, C.: A hybrid game theory and mathematical programming model for solving trans-boundary water conflicts. J. Hydrol. 570, 666–681 (2019)
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2023 The Author(s), under exclusive license to Springer Nature Switzerland AG
About this paper

Cite this paper
Przybyła-Kasperek, M., Deja, R., Wakulicz-Deja, A. (2023). Selected Approaches to Conflict Analysis Inspired by the Pawlak Model – Case Study. In: Campagner, A., Urs Lenz, O., Xia, S., Ślęzak, D., Wąs, J., Yao, J. (eds) Rough Sets. IJCRS 2023. Lecture Notes in Computer Science(), vol 14481. Springer, Cham. https://doi.org/10.1007/978-3-031-50959-9_1
Download citation
DOI: https://doi.org/10.1007/978-3-031-50959-9_1
Published:
Publisher Name: Springer, Cham
Print ISBN: 978-3-031-50958-2
Online ISBN: 978-3-031-50959-9
eBook Packages: Computer ScienceComputer Science (R0)