
Abstract
Between the late eighteenth century and the early nineteenth century, the Spanish engineer Agustín de Betancourt y Molina (1758–1824) made two innovative contributions to the formulation and resolution of trajectory synthesis problems, specifically in the context of steam engine design. These contributions are presented in two distinct works: the Mémoire sur une machine à vapeur à double effet, which was presented at the French Académie Royale des Sciences in 1789, and the book Essai sur la composition des machines, co-authored with José Maria de Lanz y Zaldívar (1764–1839). The book was published in Paris, with its first edition dating back to 1808. This work thoroughly explores the details, advancements, limitations, and shortcomings of both works. With the accessible and studied documentation available today, it can be affirmed that both contributions can be considered the earliest formulations and resolutions of what would later be referred to as synthesis of a four-bar linkage in which the coupler point performs approximately rectilinear motion with three points of precision.
Access provided by Autonomous University of Puebla. Download chapter PDF
Similar content being viewed by others


Keywords
5.1 Introduction
Among the various fields of interest of Professor López-Cajún, his work and contributions in the field of the History of Mechanism and Machine Science stand out. More specifically, and closely related to this work, Professor López-Cajún showed a special interest in the figure of José María de Lanz y Zaldívar [1, 1], who was born in Campeche in 1764, at that time part of the virreinato of Nueva España, which is now located in Mexico. Lanz collaborated with Betancourt as a co-author in the “Essai sur la composition des machines” and also in the establishment in 1802 of the first Engineering School in Spain, following the model of the French Ecole Polytechnique (Fig. 5.1).

A portrait of Agustín de Betancourt, shown in Russian attire. 1810s portrait. St. Isaac's Cathedral Museum, Saint Petersburg, Russia. Wikipedia
Betancourt was born on February 1, 1758, in Puerto de la Cruz (Santa Cruz de Tenerife, Spain). In 1778, he moved to the mainland and pursued scientific studies at the Reales Estudios de San Isidro and artistic studies at the Academia de Bellas Artes of San Fernando in Madrid, from 1778 to 1784.
In 1784, he received a scholarship that allowed him to participate in the activities of the École des Ponts et Chaussées in Paris to obtain a degree in Hydraulic Engineering. At the same time, he was entrusted with the task of establishing a Cabinet of Machines that would incorporate models and machines of general utility for public works and industry. To see more biographical details about Betancourt, you can refer to the following sources [3, 3, 3], these sources provide detailed biographical information about Agustín de Betancourt, his contributions to engineering, and his impact on industrial development.
During the process of establishing the Cabinet of Machines, he visited England in 1788 and became acquainted with the remarkable advancements made by James Watt (1736–1819) in the development of the steam engine. Watt introduced a series of technological innovations that significantly improved its performance [6, 6, 8].
One notable invention, presented by Watt on April 28, 1784, was a patent that included various solutions for the rectilinear guidance of the piston and its connection to the rocker arm. Among these solutions, one stood out: the use of an articulated quadrilateral, where a point on the connecting rod traced an almost straight trajectory. Later, Watt added a pantograph mechanism to the articulated quadrilateral. These solutions are respectively referred to as Watt's singular mechanism (see Fig. 5.2) and extended mechanism (see Fig. 5.3).

Rectilinear guidance of the piston and its connection to the rocker: Patent submitted by Watt in 1784. The second solution (b) constitutes the so-called Watt's singular mechanism. In Muirhead, The origin and progress of the Mechanical Inventions of James Watt (1854), vol. III, pl. XXII and XXIII

Extended Watt mechanism: Mechanism used by Watt in his steam engines. It can be considered as a Watt’s singular mechanism with a pantograph-shaped extension. Since EDGB is a parallelogram, point E describes a curve similar to the one described by the intersection of EA and GD, that is, point E′. Therefore, if AGDC form a Watt’s singular mechanism, point E′ will approximately describe a straight line, and consequently, point E will also do so. In Koetsier, 1983
This innovation enabled the piston to exert its force on the rocker arm during both the upward and downward strokes. It is for this reason that Betancourt referred to the new steam engine as a double-acting machine (double effet).
Despite encountering numerous challenges in accessing the new machines, he succeeded in observing a portion of the machine and grasping the implications that the new design had on enhancing performance (see Fig. 5.4).

Watt's double-acting steam engine. In Betancourt, Mémoire sur une machine à vapeur à double effet (1789), plate III
Betancourt, among other things, points out:
To begin with, I was surprised to see that the chain connected to the rocker arm, which suspended the piston inside the steam cylinder, had been replaced by a parallelogram. I will provide a more detailed description of this later on (…).
The day after witnessing this machine, I departed for France. Upon returning home, I dedicated myself to faithfully recalling all the parts I had seen and endeavored to understand their purpose. I drew various plans and profiles in an attempt to decipher their function. Eventually, I conceived a double-acting machine. From that very moment, I embarked on constructing a model that surpassed my expectations.
Recognizing the immense usefulness of this machine in mechanical arts, as well as its economical construction and fuel consumption advantages, I believed that the Academy would be pleased to receive the forthcoming description.
Upon returning to Paris, Betancourt presents the “Memoire sur une machine à vapeur à double effet” on December 15, 1789, and signs it as “Le chevalier de Betancourt Capitaine au service d'Espagne” (Knight of Betancourt, Captain in the service of Spain). The session records of December 16, 1789, of the Royal Academy of Sciences confirm that “Mr. Betancourt has presented a Memoire on a double-acting steam engine” and that the commissioners Jean Charles Borda (1733–1799) and Gaspard Monge (1746–1818) have been appointed to report on said Memoire. In the session on February 10, 1790, the commissioners’ report concludes as follows:
We believe the Academy should applaud Mr. Betancourt's enthusiasm and expertise for introducing to France a discovery whose knowledge would not have naturally reached him until much later. The Memoire he has presented, which deserves our approval, should be published in the collection of works by foreign scholars.
In this work, we will analyze in detail some of the drawings and mathematical developments included by Betancourt in the Memoire, particularly those related to the mechanism of rectilinear guidance.
It is crucial to highlight, as Franz Reuleaux (1829–1905) notes in the introduction to his Theoretische Kinematik [9]:
Watt shared with us some insights into the thought process that led directly to the mentioned mechanism. ‘The idea,’ he wrote to his son in November 1808, ‘arose as follows: Finding the double chains or racks and toothed sectors for transmitting motion from the piston shaft to the angular motion of the rocker arm highly inconvenient, I endeavored to find a means of achieving the same result through rotational movements around centers. After some time, it occurred to me that if AB and CD were two equal radii rotating around centers B and C, respectively, and connected by a rod AD moving along arcs of equal length, the deviation from a straight line would be approximately equal and opposite. Consequently, point E should trace an approximate straight line. Furthermore, if, for convenience, CD were only half the length of AB, by shifting point E closer to D, the same effect would occur. It was from this construction that the subsequently named parallel motion was derived.
While we take an interest in the contents of this letter, a closer examination reveals a deficiency that he… may have also discovered. While it presents the motives and some of the final results of Watt's experiment, it lacks indications of any systematic sequence of ideas leading to the desired outcome.
What happened in the following years? Gaspard de Prony (1755–1839), in his Architecture Hydraulique [10] of 1796, developed a theoretical study for calculating deviations from the straight line of a point on the coupling rod. Jean Nicolas Pierre Hachette 1769–1834), in his Histoire des Machines à Vapeur Depuis leur Origine jusqu'à nos Jours [11] of 1830, establishes without proof that the curve described by the connection point of the piston rod to Watt's mechanism is of sixth degree.
Later, in 1897, Gino Loria (1862–1954) conducted a bibliographic study of theoretical studies on the Watt mechanism [12], including references from Henri Brocard (1845–1922) and Julien Napoléon Haton de la Goupillière (1833–1927). However, he did not include any studies prior to 1836, as indicated by Nolle [13]. The same Nolle indicates:
It was many years after Watt’s application, in 1784, of the coupler of the four-bar linkage to provide approximate straight-line motion of the piston rod on one of his steam engines, that the general usefulness of an intermediate link (not attached to the stationary link or “frame”) motion was fully realized. Mathematical analysis of such intermediate link motions, usually formulated in terms of point paths, or coupler curves, did not gather momentum until the late 1860’s and investigations pertaining to questions of synthesis of coupler curves or certain aspects thereof did not find their way into published literature till some twenty years later. Possibly earlier progress was hampered by the lack of any consistent basis for the study of the kinematic properties of elements of link arrangements.
The discovery of Watt did not remain unnoticed, but despite its catalytic effect, only small contributions were made towards deeper understanding of the characteristics of coupler curves in general.
In the second half of the nineteenth century, after de appearance of the published works of Pafnuti Lvóvich Chebyshev (1821–1894) and Ludwig Burmester (1840–1927), the approximate methods of straight-line generation by means of linkages underwent rapid development.
It must be concluded that communications and dissemination of knowledge and new discoveries was still, at that time, a major isolating factor.
However, in the following two sections, we will analyze two contributions dated in 1789 and 1808 (see Fig. 5.5). The first one was signed by Betancourt, and the second one was jointly signed by Lanz and Betancourt. In our opinion, considering what was mentioned in the previous paragraphs, these contributions represent the first attempts at synthesizing straight-line generation with precision points. The first one follows a geometric-analytical approach, while the second one follows a purely geometric approach.

Cover pages of “Mémoire sur une machine à vapeur à double effet” and of the “Essai sur la composition des machines”
5.2 The Mémoire Sur Une Machine À Vapeur À Double Effect
The Mémoire [14] is a 31-page manuscript (see Fig. 5.7) that includes an introduction to the development of the steam engine, an account of Betancourt's visit to England focused on gathering information about advancements in steam engine design, his contacts with Watt and Boulton, and visits to facilities that already had Watt's new designs. He was only able to observe part of the machine. The manuscript provides a description of the machine's parts and its functioning, highlighting Watt's innovative mechanism. It also presents a formulation and solution for what Betancourt refers to as the specific case of the parallelogram mechanism, which allows for the calculation of the length of one of the beams. Additionally, there are seven plates included in the manuscript that reproduce parts of the steam engine, including a representation of the parallelogram mechanism in three positions. This representation serves as the basis for the calculation of the beam's length mentioned earlier.
We will now focus our attention on this last part, including the formulation presented in the manuscript, auxiliary mathematical developments that help us understand Betancourt's approach, and an analysis of the problems that arise in this formulation.
The problem he presents is as follows: given the mechanism in the three mentioned positions, the angle of the rocker arm in those positions, and the length of all the movable bars that make up the mechanism, except for the rocker arm XE, calculate the length of that rocker arm.
In modern terminology, the problem he poses is a trajectory generation synthesis problem with three points of precision.
Betancourt represents the mechanism in three chosen positions that correspond to three positions of the rocker arm: the first with an angle above the horizontal, the second in a horizontal position, and the third with an angle below the horizontal, symmetrically with respect to the first.
The represented mechanism corresponds to what we have called the extended Watt mechanism, formed by two rocker arms: in the first position, AC rotates around the fixed-point A and XE rotates around the fixed-point X. Additionally, there is a coupling bar EB, so that the bars AB, BE, and XE, all joined by kinematic pairs of rotation, correspond to a singular Watt mechanism. In this mechanism, the midpoint of the coupling bar traces an approximately straight path under certain conditions. The pantograph is added to this mechanism, formed by the extension of the bar AB to form the bar AC, and the bars CD and DE parallel to BE and BC, respectively. Point D, aligned with the center of the coupling bar BE and with point A, will also trace an approximately straight path.
The choice of the two symmetric extreme positions of the rocker arm allows Betancourt to ensure that the segments DR, EM, and BP are parallel to each other and perpendicular to the horizontal line AO. Moreover, the segments EM and BP have the same length.
Although Betancourt does not mention it in the Memoire, once the length of the crank is calculated and the perpendicular bisector of the segment EL is represented, the rotation center of the rocker arm, denoted by point X in the figure, can be located.
Betancourt's solution is a geometric resolution primarily based on trigonometric principles. As observed in the figure, the selected positions, along with a set of auxiliary lines, generate a significant number of right triangles that contribute to the resolution.
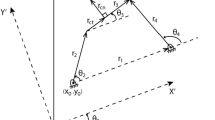
On Plate IV (see Fig. 5.6), the mechanism is depicted in three positions, and different letters are assigned to the locations of the different kinematic pairs.

Geometrical scheme used by Betancourt to describe the operation of the Watt´s mechanism. In Betancourt, Memoire sur une machine à vapeur à double effet (1789), Plate IV
Notably, points B, K, and P, on one hand, and points C, O, and Q, on the other hand, lie on two circles centered at point A, while points E, L, and M are located on a circle centered at point X. Points D, O, and R lie on a line perpendicular to segment AO, passing through point O. The location of the rocker arm in position 2 is represented by AO.
The points A, B, E, and X form an articulated quadrilateral, where points A and X indicate the positions of the pairs R with the fixed bar. Additionally, the bars CD and DE are added to this mechanism to form a parallelogram that constitutes a pantograph mechanism. Under specific conditions, point D traces an almost straight segment.
To distinguish the formulas included by Betancourt in the report from the auxiliary formulas added to facilitate Betancourt's approach, an asterisk has been added to the formula of the former.
The given starting data is:
The question at hand is to calculate the length of the bar XE based on the lengths of segments EL and LM.
He begins by calculating the length of segment HK. H represents the vertical projection of points E and M onto the horizontal position of segment OA, which aligns with the second position of the rocker arm. K corresponds to the position occupied by point B in the second position of the mechanism:
Continue calculating the length of segment KI. I is the vertical projection of points B and P onto the horizontal position of segment OA coinciding with the second position of the rocker:
The length of segment HI will be the sum of segments HK and KI:
From the right triangle EGB, calculate the length of the segment BG:
Being S the vertical projection of points E and M onto the horizontal position of segment NL coinciding with the second position of bar DE, which, when the points OHSN form a parallelogram, will have a horizontal position, the length of segment ES will be:
From the right triangle ESL, calculate the length of segment EL:
In the text of the Memoire, the calculation expression for the length of segment ML is included, and it is indicated that the same steps have been followed as to obtain the previous expression. We will now proceed to follow these steps in detail.
The length of segment MS will be:
From the right triangle MSL, we calculate the length of segment ML:
Next, based on triangles MLS and LXZ, he calculates the radius of the rocker arm R, identified by the length of segment XL:
By identifying the segments depicted in the graph, we will be able to determine:
This relationship is only true if the triangles MLS and LXZ are similar. However, that similarity does not always occur. It only occurs if:
In this case, the triangles MLS and ESL will be equal. Since the perpendicular bisectors have the same inclination but opposite directions, their intersection must occur at a point X that lies on the same horizontal line as point S. Therefore, the segment XL will be horizontal.
In this case, the triangles ESL and XLZ will be similar, and consequently, MLS and LXZ will also be similar:
That is to say, the formula deduced by Betancourt only holds if:
In other words, if:
Condition that is only fulfilled if:
Which, in turn, is only satisfied if:
Which is incompatible with the design conditions; therefore, no case of similarity between said triangles can be established, and the deduced formula would not be applicable for design purposes.
In the subsequent comments to the mathematical formulation and as a consequence of the analysis of the obtained expressions, Betancourt states that the curve traced by point D will fit more closely to the straight-line DR as the sine of the rocker's rotation angle decreases, and therefore, as the rotated angle decreases.
On the other hand, in the second position of the mechanism, he points out that if a line is drawn from point N through the center of motion A, all points on this line, whose motion depends on that of the parallelogram, will deviate as little as possible from the corresponding vertical. Betancourt has established the dimensions of the extended Watt mechanism so that the end of the parallelogram passes through three points contained in a straight line, and he deduces that the midpoint of the coupler KL will also be contained in a straight line for those positions. Therefore, point D will be connected to the end of the rod piston, and the midpoint of the coupler will be connected to the air pump that supplies water to the boiler (Fig. 7).

Handwritten page of the memoir with some of the mathematical expressions referenced in the contribution. In Betancourt, Mémoire sur une machine à vapeur à double effet (1789)
It is surprising that Betancourt exclusively uses the trigonometric procedure, makes a mistake in formulating the similarity condition, and does not use more direct geometric procedures such as obtaining the crank radius and locating its center by applying the condition of locating points E, L, and M on a circle. However, it is undeniable that he has laid the foundations for planning a synthesis of generating rectilinear trajectories with three precision points.
The approximation using a circle will appear in an example from the book “Essai sur la composition des machines,” which we will discuss next.
5.3 The “Essai Sur La Composition Des Machines”
In the year 1808, as we have already mentioned, the Essai sur la composition des machines de Lanz y Betancourt was published [15, 16]. The title of the treatise itself marked a substantial difference compared to previous works dedicated to the collection and classification of machines. It focuses on the composition of machines, that is, it analyzes not so much the machine itself but the mechanisms that constitute it.
The book was part of the material used by Jean Nicolas Pierre Hachette (1769–1834) in the Elementary Course on Machines developed at the École Polytechnique in Paris, based on the ideas of Gaspard Monge (1746–1818). The course program and the book present various types of motion transformations and classify examples of mechanisms that perform them. These examples are included in a classification table and are accompanied by descriptions of the mechanism's operation and, sometimes, by an explanation of a method to design it.
In line 17 of the table, mechanisms whose purpose is to transform reciprocating rectilinear motion into reciprocating circular motion are included. In that line, the extended Watt mechanism is listed in column H, the singular Evans mechanism in column I, and the Evans mechanism in column O. In addition to the description of the latter, a design method is provided, which we will detail next.
In this case, we directly translate the text in English from the version published by R. Ackermann in London in 1820.
It begins by explaining the structure of the mechanism. This concerns the mechanism known as Evans’ mechanism (see Fig. 5.8):
In this figure, ABB represents a side elevation of the beam of a steam engine; G its centre of rotation; nm an iron rod which is at liberty to turn freely about an axis b placed at the extremity A of the beam, and which divides the rod nm into two equal portions; the rod nm is attached by the extremity n to the piston rod f, and at the other extremity m, to the rod pq, which turns on the fixed axis q.

Explanation in the Essai of the procedure for calculating the dimensions of the mechanism so that point n follows a rectilinear trajectory. In Lanz and Betancourt, Essai sur la composition des machines (1808), O 17
The starting conditions are established:
“Under this arrangement, we will suppose to be given.
-
1st. The Dimensions of the beam of the engine ABB.
-
2nd. The position of its centre of rotation G.
-
3rd. The arc bca which the extremity A of the beam will traverse at each oscillation, and which will be tangential to the direction of the piston f.
-
4th. The length of the rod nm.”
The unknowns of the posed problem are specified:
From these data it is required to determine the length of the rod pq, and the position of its centre of rotation q, so as to ensure, as nearly as possible, the rectilinear direction of the piston.
The procedure for solving the problem is described:
“The positions of the three points m, m’, m”, will be determined, so as to indicate the respective situation of the extremity m of the given rod nm, at the commencement-towards the middle-and the close of the oscillation of the beam; and so that in those three positions, the other extremity n shall be situated accurately in· the direction of the piston rod f. If a circle be described which shall pass through these three points; its radius will be equal to the required length of the bar pq, and its centre so determined will represent the required centre of rotation q.
The curve described by the extremity n of the piston rod f, will pass through the three points n, n’, n”, and will approximate to a right line, as the arc acb described by the extremity of the beam, is smaller.”
The approach in this case is purely geometric. It is specified that the three successive positions of point m define a circumference, whose radius and center will provide a solution to the posed problem.
Furthermore, it is indicated that the same procedure can be applied to what is known as the extended Watt mechanism and the singular Watt mechanism (see Fig. 5.9).

Watt’s straight-line linkages: Watt’s extended linkage and Watt’s singular linkage. In Lanz and Betancourt, Essai sur la composition des machines (1808), H 17 and I17
“The same course of proceeding will serve to determine (in the figure H 17, plate 9.) the length of the rod f’ d, and the position of the point of rotation f’; and in the figure I 17 of the same plate, will also serve to determine the length of the beam ab, and the position of the centre of rotation a.”
5.4 Conclusions
Throughout the work, we have been able to detail, through two publications by Agustín de Betancourt, the Mémoire sur une machine à vapeur à double effet published in 1789 and the Essai sur la composition des machines published in 1808, a new procedure to approach the design of the extended Watt mechanism, specifically the calculation of one of the rocker arms, based on the condition that a point of the mechanism be located on a straight path in three positions. Betancourt employs geometric-analytical approximations, and although one of them contains some formulation errors, we can assert that it is a completely innovative procedure for the time of publication, advancing more than half a century ahead of similar contributions and constituting, to this day, the first approach to the synthesis of generating straight-line paths with three points of precision.
In the case of the Mémoire, the work did not receive much diffusion since, although its publication was approved by the French Academy of Sciences, the revolutionary events of the time in France likely prevented its publication. In fact, only the manuscript that we have worked with and is preserved at the École des Ponts et Chaussées has survived. The case of the Essai is even more surprising because the work was highly successful throughout the first half of the nineteenth century, with versions published in French in 1808 [15], 1819 [17], and 1840 [18], in English in 1820 [19], and in German in 1829 [20]. Despite this, there are no references in later writings to this contribution. However, the immediate practical consequence of Betancourt's studies and designs was the construction of the first double-acting steam engine on the continent by the Périer brothers in 1789 in France.
References
López-Cajún, C.S., Cuadrado Iglesias, J.I., Ceccarelli, M.: Early modern activity on TMM by Lanz and Betancourt before 1830. In: 11th IFToMM world congress in mechanism and machine science, Tianjin, pp 939–943 (2004)
López-Cajún, C.S.: José María Lanz y Zaldívar (1764–1839). In: Distinguished figures in mechanism and machine science: their contributions and legacies—part 2, pp. 111–122. Springer, Dordrecht (2010)
Cuadrado, J.I., Ceccarelli, M.: El nacimiento de la teoría de Máquinas y Betancourt. In; Silva M. (ed.), Técnica e Ingeniería en España. Vol. III El siglo de las luces, Real Academia de Ingeniería, Zaragoza (2005)
Erogova, O., Ceccarelli, M., Cuadrado, J.I., López-Cajún, C.S., Pavlov, V.E.: Agustín Betancourt: An Early Modern Scientist and Engineer in TMM. In: Proceedings of ASME IDETC/CIE 2006 Mechanisms & Robotics Conference, Paper No. DETC2006–99198, Philadelphia (2006)
Payen J., Agustín de Betancourt y Molina, in Dictionary of Scientific Biography, Charles Scribner’s Sons, New York
Ferguson, E.S.: Kinematics of mechanisms from the time of watt. In: Contributions from the Museum of History and Technology, Paper 27, pp. 186–230, Washington (1962)
Muirhead, J.P.: The Origin and Progress of the Mechanical and Inventions of James Watt, 3 volumes. Murray, London (1854)
Koetsier, T.: A contribution to the history of kinematics – I. watt straight-line linkages and the early french contributions to the theory of the planar 4-bar coupler curve. Mech. Mach. Theory 18, 37–42 (1983)
Reuleaux, F.: Theoretische Kinematik. Druck und Verlag von Friedrich vieweg und Sohn, Braunschweig, Grundzüge einer Theorie des Maschinenwesens (1875)
Prony, R.: (1796) Nouvelle architecture hydraulique. Firmin Didot, Paris
Hachette, J.N.P.: Histoire des Machines à Vapeur Depuis leur Origine jusqu’à nos Jours. Corby, Paris (1830)
Loria, G.: Indications Bibliographiques au sujet de la courbe de Watt. L’Intermèdiaire des Mathématiciens, Tome IV, pp. 184–185, Paris (1897)
Nolle, H.: Linkage coupler curve synthesis. a historical review – I. Developments up to 1875. Mech. Mach. Theory 9, 147–168 (1974)
Betancourt, A.: (1789) Mémoire sur une machine à vapeur à double effet, Bibliothèque de l’École National des ponts et chaussés, Paris
Lanz, J.M., Betancourt, A.: Essai sur la composition des machines: Programme du cours élémentaire des machines pour l’an 1808 par M. Hachette, Imprimerie Impériale, Paris (1808)
Ceccarelli M, Cuadrado JI (1997) Sobre el Essai sur la composition des machines por José María de Lanz y Agustín de Betancourt en 1808, 3er Congreso Iberoamericano de Ingeniería Mecánica, La Habana.
Lanz, J.M., Betancourt, A.: Essai sur la composition des machines. 2 éd, rev., corr. y augm., Bachelier Libraire, Paris (1819)
Lanz, J.M., Betancourt. A.: Essai sur la composition des machines. 3 éd, rev., corr. y augm., Bachelier Imprimeur-Libraire de l’Ecole Polytechnique, Paris (1840)
Lanz, J.M., Betancourt, A.: Analytical Essay on the Construction of Machines. R. Ackerman, London (1820)
Lanz, J.M., Betancourt, A.: Versuch über die Zusammenstzung der Machinens. A. Rücker, Berlin (1829)
Lanz, J.M., Betancourt, A.: Ensayo sobre la composición de las Máquinas. Colegio de Ingenieros de Caminos, Canales y Puertos, Madrid (1990)
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2024 The Author(s), under exclusive license to Springer Nature Switzerland AG
About this chapter

Cite this chapter
Cuadrado, J.I. (2024). Betancourt’s Contribution to Path Generation Synthesis in Mechanisms. In: Ceccarelli, M., Jauregui-Correa, J.C. (eds) State-of-the-Art and Innovations in Mechanism and Machine Science. Mechanisms and Machine Science, vol 150. Springer, Cham. https://doi.org/10.1007/978-3-031-47040-0_5
Download citation
DOI: https://doi.org/10.1007/978-3-031-47040-0_5
Published:
Publisher Name: Springer, Cham
Print ISBN: 978-3-031-47039-4
Online ISBN: 978-3-031-47040-0
eBook Packages: EngineeringEngineering (R0)