
Abstract
A sorted set (or map) is one of the most used data types in computer science. In addition to standard set operations, like Insert, Remove, and Contains, it can provide set-set operations such as Union, Intersection, and Difference. Each of these set-set operations is equivalent to some batched operation: the data structure should be able to execute Insert, Remove, and Contains on a batch of keys. It is obvious that we want these “large” operations to be parallelized. These sets are usually implemented with the trees of logarithmic height, such as 2–3 trees, treaps, AVL trees, red-black trees, etc. Until now, little attention was devoted to parallelizing data structures that work asymptotically better under several restrictions on the stored data. In this work, we parallelize Interpolation Search Tree which is expected to serve requests from a smooth distribution in doubly-logarithmic time. Our data structure of size n performs a batch of m operations in \(O(m \log \log n)\) work and poly-log span.
Access provided by Autonomous University of Puebla. Download conference paper PDF
Similar content being viewed by others

Keywords
1 Introduction
A Sorted set is one of the most ubiquitous Abstract Data Types in Computer Science, supporting Insert, Remove, and Contains operations among many others. The sorted set can be implemented using different data structures: to name a few, skip-lists [21], red-black trees [11], splay trees [22], or B-trees [9, 10].
Since nowadays most of the processors have multiple cores, we are interested in parallelizing these data structures. There are two ways to do that: write a concurrent version of a data structure or allow one to execute a batch of operations in parallel. The first approach is typically very hard to implement correctly and efficiently due to problems with synchronization. Thus, in this work we are interested in the second approach: parallel-batched data structures.
Several parallel-batched data structures implementing a sorted set are presented: for example, 2–3 trees [18], red-black trees [17], treaps [6], (a, b) trees [2], AVL-trees [15], and generic joinable binary search trees [5, 23].
Although many parallel-batched trees were presented, we definitely lack implementations that can execute separate queries in \(o(\log n)\) time under some assumptions. However, there exist at least one sequential data structures with this property — Interpolation Search Tree, or IST.
Despite the fact that concurrent IST is already presented [8, 20] we still lack its parallel-batched version: it differs much from the concurrent version since it allows many processes to execute scalar requests simultaneously, while we use the multiprocessing to parallelize large non-scalar requests.
The work is structured as follows: in Sect. 2 we describe the important preliminaries; in Sect. 3 we present the original Interpolation Search Tree; in Sects. 4, 5, and 6 we present the parallel-batched contains, insert and remove algorithms; in Sect. 7 we present a parallelizable method to keep the IST balanced; in Sect. 8 we present a theoretical analysis; in Sect. 9 we discuss the implementation and present experimental results; we conclude in Sect. 10. The full version of the paper appears at [3].
2 Preliminaries
2.1 Parallel-Batched Data Structures
Definition 1
Consider a data structure D storing a set of keys and an operation Op. If Op involves only one key (e.g., it checks whether a single key exists in the set, or inserts a single key into the set) it is called a scalar operation. Otherwise, i.e., if Op involves multiple keys, it is called a batched operation.
A data structure D that supports at least one batched operation is called a batched data structure.
We want the following batched operations from a sorted set:
-
Set.ContainsBatched(keys[]) — the operation takes an array of keys of size m and returns an array Result of size m. For each i, Result[i] is true if keys[i] exist in the set, and false otherwise.
-
Set.InsertBatched(keys[]) — the operation takes an array of keys of size m. If keys[i] does not exist in the set, the operation adds it to the set.
-
Set.RemoveBatched(keys[]) — the operation takes an array of keys of size m. If keys[i] exists in the set, the operation removes it from the set.
Note, that: 1) InsertBatched calculates the union of two sets; 2) RemoveBatched calculates the difference of two sets; and 3) ContainsBatched calculates the intersection of two sets.
We can employ parallel programming techniques (e.g., fork-join parallelism [7, 14]) to execute batched operations faster.
Definition 2
A batched data structure D that uses parallel programming to speed up batched operation execution is called a parallel-batched data structure.
2.2 Time Complexity Model
In our work, we assume the standard work-span complexity model [1] for fork-join computations. We model each computation as a directed acyclic graph, where nodes represent operations and edges represent dependencies between them. This graph has exactly one source node (i.e., the start of the execution with zero incoming edges) and exactly one sink node (i.e., the end of the execution with zero outcoming edges). Some operations have two outcoming edges — they spawn two parallel tasks and are called fork operations. Some operations have two incoming edges — they wait for two corresponding parallel tasks to complete and are called join operations.
Considering the execution graph of the algorithm, our target complexities are: 1) work denotes the number of nodes in the graph, i.e., the total number of operations executed; 2) span denotes the number of nodes on the longest path from source to sink, i.e., the length of the critical path in the graph.
2.3 Standard Parallel Primitives
In this work, we use several standard parallel primitives. Now, we give their descriptions. Their implementations are provided, for example, in [12].
Parallel loop. It executes a loop body for n index values (from 0 to n-1, inclusive) in parallel. This operation costs O(n) work and \(O(\log n)\) span given that the body has time complexity O(1).
Scan. Result := Scan(Arr) calculates exclusive prefix sums of array Arr such that \(Result[i] = \sum _{j = 0}^{i - 1} Arr[j]\). Scan has O(n) work and \(O(\log n)\) span.
Filter. Filter(Arr, predicate) returns an array, consisting of elements of the given array Arr satisfying predicate keeping the order. Filter has O(n) work and \(O(\log n)\) span given that predicate has time complexity O(1).
Merge. Merge(A, B) merges two sorted arrays A and B keeping the result sorted. It has \(O(|A| + |B|)\) work and \(O(\log ^2 (|A| + |B|))\) span.
Difference. Difference(A, B) takes two sorted arrays A and B and returns all elements from A that are not present in B, in sorted order. It takes \(O(|A| + |B|)\) work and \(O(\log ^2 (|A| + |B|))\) span.
Rank. Given that A is a sorted array and x is a value, we denote ElemRank(A, x) = \(\vert \{e \in A \vert e \le x\} \vert \) as the number of elements in A that are less than or equal to x. Given that A and B are sorted arrays, we denote Rank(A, B) = [\(\texttt {r}_{\texttt {0}}\), \(\texttt {r}_{\texttt {1}}\), \(\ldots \), \(\texttt {r}_{\vert \texttt {B} \vert - 1}\)], where \(\texttt {r}_{\texttt {i}}\) = ElemRank(A, B[i]). Rank operation can be computed in \(O(|A| + |B|)\) work and \(O(\log ^2 (|A| + |B|))\) span.
3 Interpolation Search Tree
3.1 Interpolation Search Tree Definition
Interpolation Search Tree (IST) is a multiway internal search tree proposed in [16]. IST for a set of keys \(x_0< x_1< \ldots < x_{n - 1}\) can be either leaf or non-leaf.
Definition 3
Leaf IST with a set of keys \(x_0< x_1< \ldots < x_{n-1}\) consists of array Rep with \(Rep[i] = x_i\), i.e., it keeps all the keys in this sorted array.
Definition 4
Non-leaf IST with a set of keys \(x_0< x_1< \ldots < x_{n - 1}\) consists of two parts (Fig. 1 and 2):
-
An array Rep storing an ordered subset of keys \(x_{i_0}, x_{i_1}, \ldots x_{i_{k - 1}}\).
-
Child ISTs \(C_0, C_1 \ldots C_{k}\): 1) \(C_0\) is an IST storing a subset of keys \(x_0, x_1 \ldots x_{i_0 - 1}\); 2) for \(1 \le j \le k - 1\), \(C_j\) is an IST storing a subset of keys \(x_{i_{j - 1} + 1}, \ldots x_{i_j - 1}\); and 3) \(C_{k}\) is an IST storing a subset of keys \(x_{i_{k - 1} + 1}, \ldots x_{n - 1}\);

Example of a non-leaf IST. \(Rep[0] = x_3, Rep[1] = x_6, Rep[2] = x_{10}\). \(C_0\) stores keys \(x_0 \ldots x_2\), \(C_2\) stores keys \(x_4 \ldots x_5\), \(C_3\) stores keys \(x_7 \ldots x_{9}\), \(C_4\) stores keys \(x_{11} \ldots x_{12}\).
Any non-leaf IST has the following properties: 1) all keys less than Rep[0] are located in \(C_0\); 2) all keys in between \(Rep[j-1]\) and Rep[j] are located in \(C_j\), and, finally, 3) all keys greater than \(Rep[k - 1]\) are located in \(C_{k}\).
3.2 Interpolation Search and the Lightweight Index

Example of an IST built on array in Fig. 1.
We can optimize operations on ISTs with numeric keys, by leveraging the interpolation search technique [16, 19, 24]. Each node of an IST has an index that can point to some place in the Rep array close to the position of the key being searched. This approach is named interpolation search. The structure of a non-leaf IST with an index is shown in Fig. 3.

Non-leaf IST contains: (1) Rep array; (2) an array of pointers to child ISTs C; (3) an index, allowing for fast lookups of keys in the Rep array.
In the original IST, the index uses an array ID of size \(m \in \varTheta (n^\varepsilon )\) with some \(\varepsilon \in [\frac{1}{2}; 1)\). ID[i] = j iff \(Rep[j] < a + i \cdot \frac{b - a}{m} \le Rep[j + 1]\) where a and b are the lower and upper bounds on the values. In [16], ID[\(\lfloor \frac{x - a}{b - a} \cdot m \rfloor \)] is the approximate position of x in Rep.
After finding the approximate location of x in Rep, we can find its exact location by using the linear search, as described in [16]. Let us denote i := ID[\(\lfloor \frac{x - a}{b - a} \cdot m \rfloor \)]. If i points to the right place — we stop. Otherwise, we go in the proper direction: to the right of i (Fig. 4a) or to the left of i (Fig. 4b).
Note, we can use more complex techniques instead of the linear search, e.g., exponential search [4]. However, they are often unnecessary, since the index usually provides an approximation good enough to finish the search only in a couple of operations. Also, we can use other index structures, e.g., a machine learning model [13].
3.3 Search in IST
Suppose we want to find a key in IST. The search algorithm is iterative: on each iteration we look for the key in a subtree of a node v. To look for the key in the whole IST we begin the algorithm by setting v := IST.Root.
To find key in v, we do the following (k is the length of v.Rep):
-
1.
If v is empty, we conclude that key is not there;
-
2.
If key is found in v.Rep array, then, we found the key;
-
3.
If \(\texttt {key < v.Rep[0]}\), the key can be found only in v.C[0] subtree. Thus, we set v \(\leftarrow \) v.C[0] and continue the search;
-
4.
If key> v.Rep[k - 1], the key can be found only in v.C[k] subtree. Thus, we set v \(\leftarrow \) v.C[k] and continue the search;
-
5.
Otherwise, we find j such that \(\texttt {v.Rep[j - 1]< key < v.Rep[j]}\). In this case key can be found only in v.C[j]. Thus, we set v \(\leftarrow \) v.C[j] and continue our search in the j-th child.

Determining the exact location of the key given the approximate location
3.4 Executing Update Operations and Maintaining Balance
The algorithm for inserting a key into IST is very similar to the search algorithm above. To execute Insert(key) we do the following (Fig. 5):
-
1.
Initialize v := IST.Root;
-
2.
For the current node v, if key appears in v.Rep array, we finish the operation — the key already exists.
-
3.
If v is a leaf and key does not exists in v.Rep, insert key into v.Rep keeping it sorted;
-
4.
If v is an inner node and key does not exists in v.Rep, determine in which child the insertion should continue, set v \(\leftarrow \) v.C[next_child_idx] and go to step (2).

Insert 15: proceed from the root to the second child and then to the first child.
To remove a key from IST we introduce Exists array in each node that shows whether the corresponding key in Rep is in the set or not. Thus, we just need to mark an element as removed without physically deleting it. We have to take into account such marked keys during the contains and inserts. The removal algorithm is discussed in more detail in [16].
The problem with these update algorithms is that all the new keys may be inserted to a single leaf, making the IST unbalanced. In order to keep the execution time low, we should keep the tree balanced.
Definition 5
Suppose H is some small integer constant, e.g., 10. An IST T, storing keys \(x_0< x_1< \ldots < x_{n-1}\), is said to be ideally balanced if either: 1) T is a leaf IST and n \(\le \) H; 2) T is a non-leaf IST, n> H, and elements in Rep are equally spaced, \(Rep[i] = x_{(i + 1) \cdot \lfloor \frac{n}{k} \rfloor }\), and all child ISTs \(\{C_i\}_{i=0}^k\) are ideally balanced.
For non-leaf IST, we aim to have the size of Rep as \(k = \lfloor \sqrt{n} \rfloor \). Consider an ideally balanced IST storing n keys (Fig. 6). As we require, the root of IST contains \(\varTheta (n^{\frac{1}{2}})\) keys in its Rep array; any node on the second level has Rep array of size \(\varTheta (n^{\frac{1}{4}})\); generally, any node on the i-th level has Rep array of size \(\varTheta (n^{\frac{1}{2^i}})\). Thus, an ideally balanced IST with n keys has a height of \(O(\log \log n)\).

Height of an ideal IST
In order to keep IST balanced we maintain the number of modifications (both insertions and removals) applied to each subtree T. When the number of modifications to T exceeds the initial size of T multiplied by some constant C, we rebuild T from scratch making it ideally balanced. This rebuilding approach has a proper amortized bounds and is adopted from papers about IST [8, 16, 20].
3.5 Time and Space Complexity
Mehlhorn and Tsakalidis [16] define of a smooth probability distribution. For example, the uniform distribution is smooth. Suppose we are given \(\mu \) that is smooth. From [16] we know that: 1) IST with n keys takes O(n) space; 2) the expected amortized cost of \(\mu \)-random insertion and random removal is \(O(\log \log n)\); 3) the amortized insertion and removal cost is \(O(\log n)\); 4) the expected search time on sets, generated by \(\mu \)-random insertions and random removal, is \(O(\log \log n)\); 5) the worst-case search time is \(O(\log ^2 n)\).
Therefore, IST can execute operations in \(o(\log n)\) time under reasonable assumptions. As our goal, we want to design a parallel-batched version of the IST that processes operations asymptotically faster than known sorted set implementations (e.g., red-black trees).
4 Parallel-Batched Contains
In this section, we describe the implementation of ContainsBatched(keys[]) operation. We suppose that keys array is sorted. For simplicity, we assume that IST does not support removals. In Sect. 6, we explain how to fix it.
We implement ContainsBatched operation in the following way. At first, we introduce a function BatchedTraverse(node, keys[], left, right, result[]). The purpose of this function is to determine for each index \(\texttt {left} \le i < \texttt {right}\), whether keys[i] is stored in the node subtree. If so, set result[i] = true, otherwise, result[i] = false. Given the operation BatchedTraverse, we can implement ContainsBatched with almost zero effort (Listing 1.1):

Now, we describe BatchedTraverse(node, keys[], left, right, result[]).
4.1 BatchedTraverse in a Leaf Node

Execution of BatchedTraverse in an IST leaf. Here Rank(node.Rep, keys[left..right)) = [1, 1, 2, 2, 3, 4].
If node is a leaf node, we determine for each key in keys[left..right) whether it exists in node.Rep. Since node is a leaf, keys cannot be found anywhere else in node subtree.
We may use Rank function to find the rank of each element of keys[left..right) in node.Rep and, thus, determine for each key whether it exists in node.Rep (Fig. 7, Listing 1.2). As presented in Sect. 2.3, ranks of all keys from subarray keys[left..right) may be computed in parallel in linear work and poly-logarithmic span.

4.2 BatchedTraverse in an Inner Node
Consider now the BatchedTraverse procedure on an inner node (Fig. 8).
We begin its execution with finding the position for each key from keys[left..right) in node.Rep. We may do it using Rank function as in Sect. 4.1. However, we can also use the interpolation search (described in Sect. 3.2): see Listing 1.3. Denote T as an interpolation search time in node.Rep. As stated in Sect. 3.5, T is expected to be O(1). Thus, this algorithm can be executed in \(O((right - left) \cdot T)\) work and polylog span in contrast to the algorithm based on the Rank function, that takes \(O((right - left) + \vert node.Rep \vert )\) work.

Execution of BatchedTraverse in an inner node of an IST.

Some keys of the input array (e.g., 5 and 11 in Fig. 8) are found in the Rep array. For such keys, we set Result[i] to true. After that, all other keys can be divided into three categories:
-
Keys that are strictly less than Rep[0] (e.g., 0 and 2 in Fig. 8) lie in C[0] subtree. Therefore for such keys we should continue the traversal in C[0];
-
Keys that are strictly greater than Rep[k - 1] (e.g., 100 and 101 in Fig. 8) can only be found in C[k]. Therefore for such keys we continue the traversal in C[k].
-
Keys that lie between Rep[i] and Rep[i + 1] for some \(i \in [0; k - 2]\) (we can find such i for each key using the same search technique as described above). For example, 6 and 7 for i = 1 or 9 and 10 for i = 2 in Fig. 8. Such keys can only be found in C[i + 1]. Therefore for such keys we should continue the traversal in C[i + 1];
Note that some child nodes (e.g., C[1] and C[4] in Fig. 8) can not contain any key from keys[left..right) thus we do not continue the search in such nodes.
After determining in which child the search of each key should continue we proceed to searching for keys in children in parallel.
5 Parallel-Batched Insert
We now consider the implementation of the operation InsertBatched(keys[]). Again, we suppose that array keys[] is sorted. For simplicity, we consider InsertBatched implementation on an IST without removals. In Sect. 6 we explain how to fix it.

Inserting a batch of keys in the IST
We begin the insertion procedure with filtering out keys already present in the set. We can do this using the described ContainsBatched routine together with the Filter primitive: we filter out all the keys for which ContainsBatched returns true.
We implement our procedure recursively in the same way as BatchedTraverse. Note, that each key being inserted is not present in IST, thus, for each key our traversal finishes in some leaf (Fig. 9).
After we finish the traversal — we need to insert subarray keys[\(\texttt {left}_i \ldots \texttt {right}_i\)) into some leaf \(\texttt {leaf}_i\). For example, in Fig. 9 we insert keys[0..2) (i.e., 0 and 3) to the leftmost leaf, while inserting keys[2..4) (i.e., 18 and 19) to the rightmost leaf.
To finish the insertion, we just merge keys[\(\texttt {left}_i \ldots \texttt {right}_i\)) with \(\texttt {leaf}_i\).Rep and get the new Rep array. Now, each target leaf \(\texttt {leaf}_i\) contains all the keys that should be inserted into it.
6 Parallel-Batched Remove
We now sketch the implementation of the operation RemoveBatched(keys[]). Again, we suppose that array keys is sorted.
We use the same approach as our previous algorithms. At first, we filter out the keys that do not exist in the tree. Then, we go recursively, find the keys in Rep arrays, and set the corresponding Exists cell to false.
Since now we have a logical removal, we should modify the implementations of ContainsBatched and InsertBatched.
During the execution of ContainsBatched when we encounter the key being searched in the Rep array of some node v (v.Rep[i] = key), we check v.Exists[i]: 1) if v.Exists[i] = true then key exists in the set; 2) otherwise, key does not exist in the set.
Now, we explain the updates to InsertBatched. As was stated in Sect. 5, we cannot encounter any of the key being inserted in the Rep array of any node of IST, since we filter out all the keys existing in IST. However, when keys can be logically removed this is not true anymore. Such keys have the corresponding entry in v.Exists array set to false, since the key does not logically exist in IST (Fig. 10a).
Suppose we are inserting key and we encounter it in some v.Rep. Thus, we can just set v.Exists[i] \(\leftarrow \) true (Fig. 10b). This way the insert operation “revives” a previously removed key.

Insertion of a key, that still exists in the IST physically, but is removed logically
7 Parallel Tree Rebuilding
7.1 Rebuilding Principle
As stated in Sect. 3.4, we employ the lazy subtree rebuilding approach to keep IST balanced. This algorithm is adopted from papers [8, 16, 20].
For each node of IST we maintain Mod_Cnt — the number of modifications (successful insertions and removals) applied to that node subtree. Moreover, each node stores Init_Subtree_Size — the number of keys in that node subtree when the node was created.
Suppose we execute an update operation Op in node v and Op increases v.Mod_Cnt by k (i.e., it either inserts k new keys or removes k existing keys).
If v.Mod_Cnt + k \(\le \) C \(\cdot \) v.Init_Subtree_Size (where C is a predefined constant, e.g., 2) we increment v.Mod_Cnt by k and continue the execution of Op in an ordinary way. Otherwise, we rebuild the whole subtree of v.
The subtree rebuilding works in the following way. At first, we flatten the subtree into an array: we collect all non-removed keys from the subtree to array subtree_keys[] in ascending order. This operation is described in more detail in Sect. 7.2. If the operation, that triggered the rebuilding, was InsertBatched, we merge the keys, we are inserting, with the keys from the subtree_keys. Otherwise, (that operation is RemoveBatched) we remove the required keys from the subtree_keys via the Difference operation (see Sect. 2.3 for details). Finally, we build an ideal IST new_subtree, containing all entries from subtree_keys. This operation is described in more detail in Sect. 7.3.
7.2 Flattening an IST into an Array in Parallel
First of all, we need to know how many keys are located in each node subtree. We store this number in a Size variable in each node and maintain it the following way: 1) when creating new node v, set v.Size to the initial number of keys in its subtree; 2) when inserting m new keys to v’s subtree, increment v.Size by m; 3) when removing m existing keys from v’s subtree, decrement v.Size by m.
To flatten the whole subtree of node we allocate an array keys of size node.Size where we shall store all the keys from the subtree. We implement the flattening recursively, via the Flatten(v, keys[], left, right) procedure, which fills subarray keys[left..right) with all the keys from the subtree. To flatten the whole subtree of node into newly-allocated array subtree_keys of size node.Size we use Flatten(node, subtree_keys, 0, node.Size).
Note that non-leaf node v has 2k + 1 sources of keys: v.C[i] with v.C[i].Size keys and v.Rep[i]. C[i] is 2 \(\cdot \) i-th key source and Rep[i] is 2 \(\cdot \) i + 1-th key source. Note that for a leaf node all children just contain 0 keys.
Now for each key source we must find its position in the keys array. To do this we calculate array sizes of size 2k + 1. i-th source of keys stores its keys count in sizes[i]. After that we calculate positions := Scan(sizes) to find the prefix sums of sizes. After that \(\texttt {positions[i]} = \sum _{j = 0}^{i - 1} \texttt {sizes[j]}\). Consider now i-th key source. All prior key sources should fill positions[i] keys, thus, i-th key source should place its keys into the array starting from left + positions[i] position (Fig. 11). Therefore:
-
v.C[i] places its keys in the keys array starting from left + positions[2\(\cdot \) i] by running Flatten(v.C[i], left + positions[2 \(\cdot \) i], left + positions[2 \(\cdot \) i] + v.C[i].Size).
-
If v.Exists[i] = false then v.Rep[i] should not be put in the keys array;
-
Otherwise, v.Exists[i] = true and v.Rep[i] should be placed at keys[left + positions[2 \(\cdot \) i + 1]] since v.Rep[i] is the (2 \(\cdot \) i + 1)-th key source.
Each key source can be processed in parallel, since there are no data dependencies between them.

Parallel flattening of an IST node
In Fig. 11, C[0] will place its keys in keys[left .. left + 3) subarray, Rep[0] will be placed in keys[left + 3], C[1] will place its keys in keys[left + 4 .. left + 5) subarray, Rep[1] will not be placed in keys array since its logically removed, C[2] will place its keys in keys[left + 5 .. left + 9) subarray, Rep[2] will be placed in keys[left + 9] and C [3] will place its keys in keys[left + 10 .. left + 12) subarray.
7.3 Building an Ideal IST in Parallel
Suppose we have a sorted array of keys and we want to build an ideally balanced IST (see Sect. 3.4) with these keys. We implement this procedure recursively via build_IST_subarray(keys[], left, right) procedure — it builds an ideal IST containing keys from the keys[left..right) subarray and returns the root of the newly-built subtree. Thus, to build a new subtree from array keys we just use new_root := build_IST_subarray(keys[], 0, |keys|).
If the size of the subarray (i.e., right - left) is less than a predefined constant H, we return a leaf node with all the keys from keys[left..right) in Rep array.
Otherwise (i.e., if right - left is big enough), we have to build non-leaf node. Let us denote m := right - left; k := \(\lfloor \sqrt{m} \rfloor - 1\). As follows from Definition 5, Rep array should have size \(\varTheta (\sqrt{m})\) and its elements must be equally spaced keys of the initial array. Thus, we copy each k-th key (k-th, \(2 \cdot k\)-th, etc.) into array Rep. Note, our subarray begins at position left of the initial array, since we are building IST from the subarray keys[left..right). Thus, we copy keys[left + (i + 1) \(\cdot \) k] into Rep[i]. All the copying can be done in parallel since there are no data dependencies. This way we obtain Rep array of size \(\varTheta (\sqrt{m})\) filled with equally-spaced keys of the initial subarray (Fig. 12).
Now we should build the children of the newly-created node (Fig. 12):
-
Rep[0] = keys[left + k]. Thus, all keys less than keys[left + k] will be stored in C[0] subtree: C[0] \(\leftarrow \) build_IST_subarray(keys[], left, left + k);
-
for \(1 \le i \le k - 2\), Rep[i - 1] = keys[left + i \(\cdot \) k] and Rep[i] = keys[left + (i + 1) \(\cdot \) k]. Thus, all keys x such that \(\texttt {Rep[i-1]< x < Rep[i]}\) should be stored in C[i] subtree. Since keys array is sorted, C[i] must be built from the subarray keys[left + i \(\cdot \) k + 1..left + (i + 1) \(\cdot \) k), thus, C[i] \(\leftarrow \) build_IST_subarray(keys[], left + i \(\cdot \) k + 1, left + (i + 1) \(\cdot \) k);
-
Rep[k - 1] = keys[left + \(k^2\)]. Thus, all keys greater than keys[left + \(k^2\)] are stored in C[k] subtree: C[k] \(\leftarrow \) build_IST_subarray(keys[], left + \(k^2\), right).
We can build all children in parallel, since there is no data dependencies between them.

Building children of a new node
To finish the construction of a node we need to calculate node.ID array described in Sect. 3.2. We can build it in the following way:
-
Create an array bounds of size m + 1 such that bound[i] = \(\texttt {keys[left]} + i \cdot (\texttt {keys[right - 1]} - \texttt {keys[left]}) / L\) where \(L = \varTheta (n^\varepsilon )\) with some \(\varepsilon \in [\frac{1}{2}; 1)\);
-
Use Rank primitive to find the rank of each bounds[i] in the Rep array.
8 Theoretical Results
In this section, we present the theoretical bounds for our data structure. These bounds are quite trivial, so we just give intuition.
Theorem 1
The flatten operation of an IST with n elements has O(n) work and \(O(\log ^3 n)\) span. The building procedure of an ideal IST from an array of size n has O(n) work and \(O(\log n \cdot \log \log n)\) span. Thus, the rebuilding of IST with n elements costs O(n) work and \(O(\log ^3 n)\) span.
Proof (Sketch)
While the work bounds are trivial, we are more interested in span bounds. From [16] we know that in the worst case, the height of IST with n keys does not exceed \(O(\log ^2 n)\). Thus, the flatten operation just goes recursively into \(O(\log ^2 n)\) levels and spends \(O(\log n)\) span at each level. This gives \(O(\log ^3 n)\) span in total. The construction of an ideal IST has \(O(\log \log n)\) recursive levels while each level can be executed in \(O(\log n)\) time, i.e., copy the elements into Rep array. This gives us the result.
This brings us closer to our main complexity theorem.
Theorem 2
The work of a batched operation on our parallel-batched IST has the same complexity as if we apply all m operations from this batch sequentially to the original IST of size n (from [16], the expected execution time is \(O(m \log \log n)\)). The total span of a batched operation is \(O(\log ^4 n)\).
Proof (Sketch)
The work bound is trivial — the only difference with the original IST is that we can rebuild the subtree in advance before applying some of the operations. Now, we get to the span bounds. From [16], we know that the height of IST with n keys does not exceed \(O(\log ^2 n)\). On each level, we spend: 1) at most \(O(\log ^2 n)\) span for merge and rank operations; or 2) we rebuild a subtree at that level and stop. The first part gives us \(O(\log ^4 n)\) span, while rebuilding takes just \(O(\log ^3 n)\) span. This leads us to the result of the total \(O(\log ^4 n)\) span.
9 Experiments
We have implemented the Parallel Batched IST in C++ using OpenCilk [7] as a framework for fork-join parallelism.
We tested our parallel-batched IST on three workloads. We initialize the tree with elements from the range \([-10^8; 10^8]\) with probability 1/2. Thus, the expected size of the tree is \(10^8\). Then we call: 1) search for a batch of \(10^7\) keys, taken uniformly at random from the range; 2) insert a batch of random \(10^7\) keys, taken uniformly at random from the range; 3) remove a batch of random \(10^7\) keys, taken uniformly at random from the range.
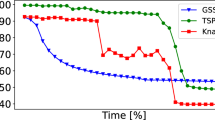
The experimental results are shown in Fig. 13. The OX axis corresponds to the number of worker processes and the OY axis corresponds to the time required to execute the operation in milliseconds. Each point of the plot is obtained as an average of 10 runs. We run our code on an Intel Xeon Gold 6230 machine with 16 cores.

Benchmark results for Parallel-batched Interpolation Search Tree
As shown in the results, we achieve good scalability. Indeed: 1) 14x scaling on ContainsBatched operation for 16 processes; 2) 11x scaling on InsertBatched operation for 16 processes; 3) 13x scaling on RemoveBatched operation for 16 processes.
We also compared our implementation in a sequential mode with std::set. std::set took 9257 ms to check the existence of \(10^7\) keys in a tree with \(10^8\) elements while our IST implementation took only 3561 ms. We achieve such speedup by using interpolation search as described in Sect. 3.2.
10 Conclusion
In this work, we presented the first parallel-batched version of the interpolation search tree that has an optimal work in comparison to the sequential implementation and has a polylogarithmic span. We implemented it and got very promising results. We believe that this work will encourage others to look into parallel-batched data structures based on something more complex than binary search trees.
References
Acar, U.A., Blelloch, G.E.: Algorithms: Parallel and sequential. https://www.umut-acar.org/algorithms-book 6 (2019)
Akhremtsev, Y., Sanders, P.: Fast parallel operations on search trees. In: 2016 IEEE 23rd International Conference on High Performance Computing (HiPC), pp. 291–300. IEEE (2016)
Aksenov, V., Kokorin, I., Martsenyuk, A.: Parallel-batched interpolation search tree. arXiv preprint (2023). arXiv:2306.13785
Bentley, J.L., Yao, A.C.C.: An almost optimal algorithm for unbounded searching. Inform. Process. Lett. 5(3), 82–87(SLAC-PUB-1679) (1976)
Blelloch, G.E., Ferizovic, D., Sun, Y.: Just join for parallel ordered sets. In: Proceedings of the 28th ACM Symposium on Parallelism in Algorithms and Architectures, pp. 253–264 (2016)
Blelloch, G.E., Reid-Miller, M.: Fast set operations using treaps. In: Proceedings of the Tenth Annual ACM Symposium on Parallel Algorithms And Architectures, pp. 16–26 (1998)
Blumofe, R.D., Joerg, C.F., Kuszmaul, B.C., Leiserson, C.E., Randall, K.H., Zhou, Y.: Cilk: an efficient multithreaded runtime system. J. Parallel Distrib. Comput. 37(1), 55–69 (1996)
Brown, T., Prokopec, A., Alistarh, D.: Non-blocking interpolation search trees with doubly-logarithmic running time. In: Proceedings of the 25th ACM SIGPLAN Symposium on Principles and Practice of Parallel Programming, pp. 276–291 (2020)
Comer, D.: Ubiquitous b-tree. ACM Comput. Surv. (CSUR) 11(2), 121–137 (1979)
Graefe, G., et al.: Modern b-tree techniques. Foundations and Trends® in Databases 3(4), 203–402 (2011)
Guibas, L.J., Sedgewick, R.: A dichromatic framework for balanced trees. In: 19th Annual Symposium on Foundations of Computer Science (sfcs 1978), pp. 8–21. IEEE (1978)
JáJá, J.: An introduction to parallel algorithms. Reading, MA: Addison-Wesley 10, 133889 (1992)
Kraska, T., Beutel, A., Chi, E.H., Dean, J., Polyzotis, N.: The case for learned index structures. In: Proceedings of the 2018 International Conference on Management of Data, pp. 489–504 (2018)
Lea, D.: A java fork/join framework. In: Proceedings of the ACM 2000 Conference on Java Grande, pp. 36–43 (2000)
Medidi, M., Deo, N.: Parallel dictionaries using AVL trees. J. Parallel Distrib. Comput. 49(1), 146–155 (1998)
Mehlhorn, K., Tsakalidis, A.: Dynamic interpolation search. J. ACM (JACM) 40(3), 621–634 (1993)
Park, H., Park, K.: Parallel algorithms for red-black trees. Theoret. Comput. Sci. 262(1–2), 415–435 (2001)
Paul, W.., Vishkin, U.., Wagener, H..: Parallel dictionaries on 2–3 trees. In: Diaz, Josep (ed.) ICALP 1983. LNCS, vol. 154, pp. 597–609. Springer, Heidelberg (1983). https://doi.org/10.1007/BFb0036940
Peterson, W.W.: Addressing for random-access storage. IBM J. Res. Dev. 1(2), 130–146 (1957)
Prokopec, A., Brown, T., Alistarh, D.: Analysis and evaluation of non-blocking interpolation search trees. arXiv preprint arXiv:2001.00413 (2020)
Pugh, W.: Skip lists: a probabilistic alternative to balanced trees. Commun. ACM 33(6), 668–676 (1990)
Sleator, D.D., Tarjan, R.E.: Self-adjusting binary search trees. J. ACM (JACM) 32(3), 652–686 (1985)
Sun, Y., Ferizovic, D., Belloch, G.E.: Pam: parallel augmented maps. In: Proceedings of the 23rd ACM SIGPLAN Symposium on Principles and Practice of Parallel Programming, pp. 290–304 (2018)
Willard, D.E.: Searching unindexed and nonuniformly generated files in \(\backslash \)log\(\backslash \)logn time. SIAM J. Comput. 14(4), 1013–1029 (1985)
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2023 The Author(s), under exclusive license to Springer Nature Switzerland AG
About this paper

Cite this paper
Aksenov, V., Kokorin, I., Martsenyuk, A. (2023). Parallel-Batched Interpolation Search Tree. In: Malyshkin, V. (eds) Parallel Computing Technologies. PaCT 2023. Lecture Notes in Computer Science, vol 14098. Springer, Cham. https://doi.org/10.1007/978-3-031-41673-6_9
Download citation
DOI: https://doi.org/10.1007/978-3-031-41673-6_9
Published:
Publisher Name: Springer, Cham
Print ISBN: 978-3-031-41672-9
Online ISBN: 978-3-031-41673-6
eBook Packages: Computer ScienceComputer Science (R0)