
Abstract
Dissipative systems play a very important role in several physical models, most notably in Celestial Mechanics, where the dissipation drives the motion of natural and artificial satellites, leading them to migration of orbits, resonant states, etc. Hence, there is the need to develop theories that ensure the existence of structures such as invariant tori or periodic orbits, and device efficient computational methods. In this work we study the existence of invariant tori for those dissipative systems known as conformally symplectic systems, which have the property that they transform the symplectic form into a multiple of itself. To give explicit examples of conformally symplectic systems, we will present two different models: a discrete system known as the standard map and a continuous system known as the spin-orbit problem. In both cases we will consider the conservative and dissipative versions, that will help to highlight the differences between the symplectic and conformally symplectic dynamics. For such dissipative systems we will present a KAM theorem in an a-posteriori format, originally developed in [44] for the symplectic case: assume we start with an approximate solution satisfying a suitable non-degeneracy condition, then we can find a true solution nearby. The theorem does not assume that the system is close to integrable. This method provides a very efficient algorithm which provides rigorous estimates close to optimal. Indeed, the method gives a criterion (the Sobolev blow up criterion) that allows to compute numerically the breakdown of invariant tori. We will review this method as well as an extension of J. Greene’s method. Computing close to the breakdown, allows to discover new mathematical phenomena, such as the bundle collapse mechanism. We will also provide a short survey of the present state of KAM estimates for the existence of invariant tori in the conservative and dissipative standard maps and spin-orbit problems.
Access provided by Autonomous University of Puebla. Download conference paper PDF
Similar content being viewed by others

Keywords
1 Introduction
Dissipative dynamical systems play a fundamental role in shaping the motions of physical problems. The role of dissipative forces in Celestial Mechanics is often of less importance with respect to the conservative forces, which are mainly given by the gravitational attraction between celestial bodies. Nevertheless dissipative forces are present at any size and time scale and their effects accumulate over time, so that even if some of them are negligible on a scale of centuries, they might be dominant in a scale of a million of years.
A partial list of dissipative forces includes tidal forces, Stokes drag, Poynting-Robertson effect, Yarkowski/YORP effects, atmospheric drag. These forces act on bodies of different dimensions, namely planets, satellites, spacecraft, dust particles, and in different epochs of the Solar system from the dynamics within the interplanetary nebula at the early stage of formation of the Solar system, to present times. For example, the effect of the Earth’s atmosphere on the orbital lifetime of artificial satellites, happens in practical scales of time. It becomes therefore important to understand invariant structures (e.g., periodic orbits and quasi-periodic motions on invariant tori) in dissipative systems.
The definition of dissipative system is not uniform in the literature. Here we will adopt that a dissipative system has the property that the phase space volume contracts during the time evolution of the flow. In this work we will be concerned with a special class of dissipative systems known as conformally symplectic systems, see Definitions 1 and 2. These systems enjoy the property that the flow or the map transform the symplectic form into a multiple of itself.
Conformally symplectic systems have appeared in many applications (see, e.g., [6, 18, 19, 28, 51, 115]) or have been studied because they are geometrically natural objects [1, 5, 109].
For applications to Celestial Mechanics, an important source of conformally symplectic systems is that of a mechanical system with friction proportional to the velocity. This is the case of the so-called spin-orbit problem in Celestial Mechanics [33, 34, 42, 114], which will be presented in Sect. 2.3. It describes the motion of an oblate satellite around a central planet, under some simplifying assumptions like that the orbit of the satellite is Keplerian and that the spin-axis is perpendicular to the orbital plane. When the satellite is assumed to be rigid, the problem is conservative, while when the satellite is assumed to be non-rigid, the problem is affected by a tidal torque. The dissipative part of the spin-orbit problem depends upon two parameters: the dissipative constant, which is a function of the physical properties of the satellite, and a drift term, which depends on the (Keplerian) eccentricity of the orbit. A discrete analogue of the spin-orbit problem is the dissipative standard map [35]. In Sect. 2.1 we will review conservative and dissipative versions of the standard map.
Indeed, the presence of a drift term is fundamental in conformally symplectic systems: while in the conservative case one can find an invariant torus with fixed frequency by adjusting the initial conditions, in the dissipative case it is not possible to just tune the initial conditions to obtain a quasi-periodic solution of a fixed frequency. One needs to adjust a drift parameter to find an invariant torus with preassigned frequency (for some appropriate choice of initial conditions).
We stress that adding a dissipation to a Hamiltonian system is a very singular perturbation: the Hamiltonian admits quasi-periodic solutions with many frequencies, while a system with positive dissipation leads to attractors with only one quasi-periodic solution. To obtain attractors with a fixed frequency, one needs to adjust the drift parameters.
The existence of invariant tori is the subject of the celebrated Kolmogorov–Arnold–Moser (KAM) theory ([2, 78, 90], see also [3, 43, 53, 65, 91, 96, 112]) which, in its original formulation, proved the persistence of invariant tori in nearly–integrable Hamiltonian systems. The theory can be developed under two main assumptions:
-
the frequency vector must satisfy a Diophantine condition (to deal with the so-called small divisors problem),
-
a non–degeneracy condition must be satisfied (to ensure the solution of the cohomological equations providing the approximate solutions).
Also, geometric properties of the system play an important role. Notably, the original results were developed for Hamiltonian systems, but this has been greatly extended.
A KAM theory for non-Hamiltonian systems with adjustment of parameters was developed in the remarkable and pioneer paper [92], and later in [10, 11, 41, 86, 101]. A KAM theory for conformally symplectic systems with adjustment of parameters was developed in [21] using the so-called automatic reducibility method introduced in [44]. The paper [21] produces an a-posteriori result. A-posteriori means that the existence of an approximate solution, which satisfies an invariance equation up to a small error, ensures the existence of a true solution of the invariance equation, provided some non-degeneracy conditions and smallness conditions on parameters are satisfied.
The automatic reducibility proofs of KAM theorem provide very efficient and stable algorithms to construct invariant tori in the symplectic [56, 62, 63] and conformally symplectic [18, 19, 26, 28, 64] case. The a-posteriori format guarantees that these solutions are correct. Indeed, it was proved that the algorithm leads to a continuation method in parameters that, given enough resources, reaches arbitrarily close the boundary of the set of parameters for which the solution exists. In [20] it was found numerically that the tori—which are normally hyperbolic– break down because the stable bundle becomes close to the tangent, even if the stable Lyapunov exponent (which is given by the conformal symplectic constant) remains away from zero.
1.1 Consequences of the A-Posteriori Method for Conformally Symplectic Systems
The results presented in these notes are part of a more systematic program of providing KAM theorems in an a-posteriori format with many consequences that, for completeness, we shortly review below.
\(\bullet \) Regularity results.
The a-posteriori format, leads automatically to many regularity results: deducing finitely differentiable results from analytic ones, bootstrap of regularity, Whitney dependence on the frequency. We will not even mention these regularity results, but we point that in the conformally symplectic case, we can obtain several rather striking geometric results. The conformally symplectic systems are very rigid. A classic result that plays a role is the paring rule of Lyapunov exponents. The conformal geometric structure restricts severely the Lyapunov exponents that can appear [50, 115].
\(\bullet \) Rigidity of neighborhoods of tori.
In [22] it is shown that the dynamics in a neighborbood of a Lagrangian torus is conjugate to a rotation and a linear contraction. In particular, the only invariant in a neighborhood is the rotation and all the tori with the same rotation are analytically conjugate in a neighborbood.
\(\bullet \) Greene’s method.
An analogue of Greene’s method ([59]) to compute the analyticity breakdown is given in [27], which presents a partial justification of the method. It is proved that when the invariant attractor exists, then one can predict the eigenvalues of the periodic orbits approximating the torus for parameter values close to those of the attractor.
\(\bullet \) Whiskered tori.
In [24, 25] one can find a theory of whiskered tori in conformally symplectic systems. This theory involves interactions of dynamics and geometry. The theory allows—there are examples—that the stable and unstable bundles are trivial, but somewhat surprisingly, concludes that the center bundles have to be trivial.
\(\bullet \) The singular limit of zero dissipation.
We showed in [23] that, if one fixes the frequency \(\omega \), one can choose the drift parameter \(\mu \) as a function of the perturbation in a smooth way: \(\mu = \mu (\omega , \varepsilon ) \equiv \mu _\varepsilon (\omega ) \). Note however that \(\mu _0 (\omega )=0\), but for \(\varepsilon > 0\), the function \(\mu _\varepsilon \) is invertible so that the function \(\mu _\varepsilon (\omega )\) is a smooth function with a limit as \(\varepsilon \rightarrow 0\). Nevertheless, the sets of \(\omega \) that appear have a complicated behaviour (devil’s staircase). Hence, the floating frequency KAM methods, e.g. [2, 39, 95], have difficulty dealing with this limit.
One of the advantages of the a-posteriori theorems is that they can validate approximate solutions, no matter how they are obtained. We have already mentioned the validation of numerical computations. It turns out that one can also validate formal asymptotic expansions and obtain estimates on the domains of existence of the tori in the singular limit [23]. This limit has also been studied numerically [12, 13], leading to the conjecture that the Lindstedt series are Gevrey. A proof of the conjecture is given in [14].
\(\bullet \) Breakdown of the rotational tori.
One of the consequences of the conformal symplectic geometry is the “pairing rule” for exponents [115]. Hence the tori, which have a dynamics which is a rotation, must have normal exponents coinciding with \(\lambda \). The tori are normally hyperbolic attractors. Notice that the loss of hyperbolicity cannot happen because of the exponents break down. This leads to the mechanism of bundle collapse that was discovered in [20] and will be discussed in more detail in Sect. 6.
1.2 Organization of the Paper
The work is organized as follows. In Sect. 2 we present the conservative and dissipative standard maps and spin-orbit problems. Conformally symplectic systems and Diophantine vectors are introduced in Sect. 3. The definition of invariant tori and the statement of the KAM theorem for conformally symplectic systems is given in Sect. 4. Two numerical methods for the computation of the breakdown threshold of invariant attractors is presented in Sect. 5. The relation between the collision of invariant bundles and the breakdown of the tori is described in Sect. 6. Applications of KAM estimates to the conservative/dissipative standard maps and spin-orbit problems are briefly recalled in Sect. 7.
2 Conservative/Dissipative Standard Maps and Spin-Orbit Problems
In this Section we present two models, a discrete and a continuous one, that will help to have a qualitative understanding of the main features of conservative and dissipative systems. The first example is a discrete model, known as the standard map (see Sects. 2.1 and 2.2). The continuous example is a physical model, known as the spin-orbit problem, which is closely related to the standard map (see Sect. 2.3). In both cases we present their conservative and dissipative formulations.
2.1 The Conservative Standard Map
The standard map is a discrete model introduced by Chirikov in [40], which has been widely studied to understand several features of dynamical systems, such as regular motions, chaotic dynamics, breakdown of invariant tori, existence of periodic orbits, etc. The standard map is a 2-dimensional discrete system in the variables \((y,x)\in {\mathbb R}\times \mathbb T\), which is described by the formulas:
where \(\varepsilon >0\) is called the perturbing parameter and \(V=V(x)\) is an analytic function.
A wide number of articles and books in the literature (see, e.g., [60, 83]) deals with the classical (Chirikov) standard map [40] obtained setting \(V(x)=\sin x\) in (1).
Instead of (1) we can use an equivalent notation and write the standard map assigning an integer index to each iterate:
We can easily verify that the standard map (2) satisfies the following properties, that will be useful for further discussion.
(A) The standard map is integrable for \(\varepsilon =0\). In fact, for \(\varepsilon =0\) one gets the formulas:
which show that the mapping is integrable, since \(y_j\) is constant and \(x_j\) increases by \(y_0\). For \(\varepsilon \not =0\) but small, the map is nearly-integrable.
(B) The standard map is conservative, since the determinant of its Jacobian is equal to one:
(C) The standard map satisfies the so-called twist property, which amounts to requiring that for a constant \(c\in \mathbb R\), using the formulation (1):
for all \((y,x)\in \mathbb R\times \mathbb T\). From (1) we have that the twist property is trivially satisfied, since
The twist property is not satisfied when considering a slight modification of (1), yielding a discrete system which is known as the non-twist standard map (see, e.g., [47, 48]). This mapping is described by the equations:
with \(a\in \mathbb R\). In this case, the twist condition is violated along a curve in the (y, x) plane.
Systems violating the twist condition appear in Celestial Mechanics, for example in the critical inclination for the motion near an oblate planet [79]. One of the advantages of the KAM results we will establish is that we do not need to assume global non-degeneracy conditions on the map, but rather some properties of the approximate solution. We just need to assume that a \(d\times d\) matrix is invertible. The matrix is an explicit algebraic expression on derivatives of the approximate solution and averages.
Figure 1 shows the graph of the iterates of the standard map for several values of the perturbing parameter and for several initial conditions in each plot.

Graphs of the conservative standard map for different values of the perturbing parameter and different initial conditions
From the upper left plot of Fig. 1, we see that for \(\varepsilon =0\) the system is integrable; the initial conditions has been chosen to give rotational quasi–periodic curves (lying on straight lines).
When we switch-on the perturbation, even for small values as \(\varepsilon =0.1\), the system becomes non–integrable. It is easy to check that there exists a stable equilibrium point at \((\pi ,0)\) and an unstable one at (0, 0). The quasi–periodic (KAM) curves are distorted with respect to the integrable case and the stable point \((\pi ,0)\) is surrounded by elliptic librational islands. The amplitude of the islands increases as \(\varepsilon \) gets larger, as it is shown for \(\varepsilon =0.4\) where we also notice the appearance of minor resonances. Chaotic dynamics is clearly present for \(\varepsilon =0.7\) around the unstable equilibrium point, while the number of rotational quasi–periodic curves decreases when increasing the perturbing parameter. In particular, for \(\varepsilon =0.9\) we see large chaotic regions, a few quasi–periodic curves, new islands around higher–order periodic orbits. Finally, for \(\varepsilon =1\) we have only chaotic and librational motions, while quasi–periodic curves disappear.
As we will mention in Sect. 7, there is a wide literature on KAM applications to the standard map to prove the existence of invariant rotational tori with fixed frequency, see [29, 46, 56].
The example we have presented in this Section shows a marked difference with respect to the model that will be presented in Sect. 2.2, thus witnessing the divergence of the dynamical behaviour between conservative and dissipative dynamical systems. This difference is clearly demonstrated by the dynamics associated to the conservative and dissipative standard maps, as well as by that of more complex systems, like the conservative and dissipative spin-orbit problems, which will be described in Sect. 2.3.
2.2 The Dissipative Standard Map
The dissipative standard map is obtained from (1) adding two parameters: a dissipative parameter \(0<\lambda <1\) and a drift parameter \(\mu \). For \((y,x)\in \mathbb R\times \mathbb T\), the equations describing the dissipative standard map are the following:
where \(\lambda ,\varepsilon \in \mathbb R_+\), \(\mu \in \mathbb R\). We remark that we obtain the conservative standard map when \(\lambda =1\) and \(\mu =0\). We also remark that the Jacobian of the mapping (3) is equal to \(\lambda \), which gives a measure of the rate of contraction or expansion of the area of the phase space. There are several results related to the existence of attractors in the dissipative standard map; a partial list of papers is the following: [7, 8, 55, 70, 72, 104, 110, 113, 116]. Rigorous mathematical works on strange attractors for dissipative 2-D maps with twist are [82, 84, 111].
It is also important to stress that for \(\varepsilon =0\) the trajectory \(\{y\equiv {\mu \over {1-\lambda }}\}\times \mathbb T\), or equivalently \(\{\omega \equiv {\mu \over {1-\lambda }}\}\times \mathbb T\), is invariant. In fact, for \(\varepsilon =0\) we have \(y'=\lambda y+\mu \) and since we are looking for an invariant object, we need to have \(y'=y\). Hence, we must solve the equation
On the other hand, the frequency \(\omega \) associated to the standard map is, by definition, given by
which yields \(\omega =y\). Combining this last result with (4), we obtain
showing the strong relation between the frequency and the drift, which cannot be chosen independently. In particular, if we fix the frequency (as it will be required in the KAM theorem of Sect. 4.2), then we need to tune properly the drift parameter \(\mu \). This is a substantial difference with respect to the conservative case; dissipative dynamical systems will require a procedure to prove KAM theory differently than in the conservative case.
The dynamics associated to the dissipative standard map admits (see Fig. 2) attracting periodic orbits and invariant curve attractors; for different parameters and initial conditions, there appear also strange attractors which have an intricate geometrical structure [83, 111]: introducing a suitable definition of dimension, the strange attractors are shown to have, for some parameter values, a non–integer dimension (namely a fractal dimension). We will not consider these cases and concentrate on those in which the attractor is a one-dimensional smooth torus and the motion is smoothly conjugate to a rotation.
We remark that, due to the dissipative character of the map, there might exist at most one invariant curve attractor, while there might be more coexisting periodic orbits (see Fig. 2 and [55]) or strange attractors.
The existence and breakdown of smooth invariant tori in the dissipative standard map have been recently studied in [26] (see also [20]).

Left: Attractors for the dissipative standard map with \(\varepsilon =0.9\), \(\lambda =0.91\), \(\mu =2\pi (1-\lambda )({{\sqrt{5}-1}\over 2})\). Right: The corresponding basins of attraction using a color scale providing the frequency
Each of the attractors of Fig. 2 is characterized by an associated basin of attraction, which is composed by the set of initial conditions \((x_0,y_0)\) whose evolution ends on the given attractor. Figure 2, right, shows the basins of attraction for the case in Fig. 2, left; they have been obtained taking a grid of \(500\times 500\) initial conditions and looking at their evolution after having performed a number of preliminary iterations.
We want to stress that the role of the drift parameter \(\mu \) is of paramount importance in dissipative systems, since an inappropriate choice might prevent to find a specific attractor. An example is given in Fig. 3, where we look for the torus with frequency equal to the golden ratio multiplied by the factor \(2\pi \), namely \(\omega =2\pi \, {{\sqrt{5}-1}\over 2}\simeq 3.8832\), for the dissipative standard map with \(\varepsilon =0.1\), \(\lambda =0.9\). The upper left panel shows that taking \(\mu =0\), the solution spirals on the point attractor at \((\pi ,0)\); taking \(\mu =0.1\) (Fig. 3, upper right panel) leads to an attractor which has frequency different than \(\omega \), while the right choice corresponds to \(\mu =0.0617984\) as in the left bottom panel of Fig. 3. We present in Fig. 3, bottom right panel, the behaviour of the drift as a function of the dissipative parameter \(\lambda \), which shows that \(\mu \) tends to zero in the limit of the conservative case, as it is expected.

The dissipative standard map for different values of the drift: \(\mu =0\) upper left, \(\mu =0.1\) upper right, \(\mu =0.0617984\) bottom left. Graph of \(\mu \) versus \(\lambda \), bottom right
The twist condition for the dissipative standard map is a condition that now involves the parameters. A non-twist version of the dissipative standard map is the following map,
In Fig. 4, we notice that this map has parameter values where the rotation number does not change in a monotone direction when we change the parameter a. See [17] for a study of the invariant circles of the map (5).

2.3 The Spin-Orbit Problems
An interesting example of a continuous system which shows the main dynamical features of regular and chaotic invariant objects is the so-called spin-orbit problem in Celestial Mechanics. The conservative version of the model is based upon the following assumptions. We consider a triaxial satellite, say \(\mathcal S\), with principal moments of inertia \(I_1<I_2<I_3\). We assume that the satellite moves on a Keplerian orbit around a central planet, say \(\mathcal P\), while it rotates around a spin–axis perpendicular to the orbit plane and coinciding with its shortest physical axis.
We take a reference system centered in the planet and with the horizontal axis coinciding with the direction of the semimajor axis. We denote by r the orbital radius, by f the true anomaly, while we denote by x the angle between the semimajor axis and the direction of the longest axis of the ellipsoidal satellite (see Fig. 5).

The spin-orbit problem
The equation of motion describing the conservative spin-orbit problem is
where \(\varepsilon ={3\over 2}{{I_2-I_1}\over I_3}\) is a parameter which measures the equatorial flattening of the satellite. Equation (6) is associated to the one-dimensional, time-dependent Hamiltonian function:
where \(y=\dot{x}\). Due to the assumptions of the model, the quantities r and f are known functions of the time, being the solution of Kepler’s problem which determines the elliptical orbit of the satellite. They depend on the orbital eccentricity, which plays the role of an additional parameter.
It is important to observe that:
-
the Hamiltonian (7) is integrable whenever \(\varepsilon =0\), namely the satellite has equatorial symmetry with \(I_1=I_2\);
-
the Hamiltonian (7) is integrable when the eccentricity is equal to zero, since the orbit becomes circular, namely \(r=a\) and f coincides with the mean anomaly, which is proportional to time.
The existence and breakdown of invariant tori in the conservative spin-orbit problem have been investigated in [33, 34].
We remark that Hamilton’s equations associated to (7) are given by
Integrating (8) with a modified Euler’s method with time-step h, we obtain a discrete system which retains the many features of the conservative standard map when taking the solution on the Poincaré map at time intervals multiple of \(2\pi \):
where \(r_n=r(t_n)\), \(f_n=f(t_n)\).
The dissipative spin-orbit problem is obtained by taking into account that the satellite is non rigid and therefore it is subject to a tidal torque. The equation of motion including a model for the tidal torque can be written as
where
(see, e.g., [35, 93]). The coefficient \(K_d\) is called the dissipative constant, and depends on the physical and orbital features of the body:
where n is the mean motion, \(k_2\) is the so-called Love number (depending on the structure of the satellite), Q is called the quality factor (it compares the frequency of oscillation of the system to the rate of dissipation of the energy), \(\xi \) is a structure constant such that \(I_3 = \xi mR_e^2\) with \(R_e\) the equatorial radius, M is the mass of the planet, m is the mass of the satellite. For bodies like the Moon or Mercury, realistic values are \(\varepsilon =10^{-4}\) and \(K_d=10^{-8}\).
The expression for the tidal torque can be simplified by assuming (as, e.g., in [42]) that the dynamics is ruled by the averages of L(e, t) and N(e, t) over one orbital period. The averaged quantities are given by
Hence, we obtain the following equation of motion in the averaged case:
We can refer to the quantity \(\lambda =K_d {\overline{L}}(e)\) as the dissipative parameter and to \(\mu ={{{\overline{N}}(e)}\over {{\overline{L}}(e)}}\) as the drift parameter.
Let us write (10) in canonical form as
Similarly to the conservative case, the integration of (11) with a modified Euler’s method with time-step h, leads to a discrete system similar to the dissipative standard map with dissipative and drift parameters, when taking the solution on the Poincaré map at time intervals multiple of \(2\pi \):
As we will mention in Sect. 7, the existence and breakdown of invariant attractors in the dissipative spin-orbit problem have been studied in [18, 19, 28] through an application of KAM theory for conformally symplectic systems and through suitable numerical methods.
3 Conformally Symplectic Systems and Diophantine Vectors
In this Section we give the definition of conformally symplectic systems for maps and flows (see Sect. 3.1) and we introduce the set of Diophantine vectors for discrete and continuous systems (see Sect. 3.2).
3.1 Discrete and Continuous Conformally Symplectic Systems
An important class of dissipative dynamical systems is given by the conformally symplectic systems; the dissipative standard map is an example of a conformally symplectic discrete system, while the dissipative spin-orbit problem is an example of a conformally symplectic continuous system.
Before giving the formal definition, let us say that conformally symplectic systems are characterized by the property that the map or the flow transforms the symplectic form into a multiple of itself (see Definitions 1 and 2 below). Beside the examples mentioned before, we stress that conformally symplectic models can be found in different fields, e.g. the Euler-Lagrange equations of exponentially discounted systems ([6], typically found in finance, when inflation is present and one needs to minimize the cost in present money) or Gaussian thermostats ([51, 115], namely mechanical systems with forcing and a thermostating term based on the Gauss Least Constraint Principle for nonholonomic constraints).
Let us start to introduce the notion of 2n-dimensional conformally symplectic maps. Let \(\mathcal{M} = U\times \mathbb T^n\) be the phase space with \(U\subseteq \mathbb R^n\) an open, simply connected domain with smooth boundary; the phase space \(\mathcal{M}\) is endowed with the standard scalar product and a symplectic form \(\varOmega \), represented by a matrix J at the point \({\underline{z}}\) acting on vectors \({\underline{u}},{\underline{v}}\in \mathbb R^n\) as \(\varOmega ({\underline{u}},{\underline{v}})=({\underline{u}},J({\underline{z}}){\underline{v}})\) with \((\cdot ,\cdot )\) denoting the scalar product. Note that the matrix J depends not only on the symplectic form but on the metric considered.
Definition 1
A diffeomorphism f on \(\mathcal M\) is conformally symplectic, if there exists a function \(\lambda : \mathcal{M}\rightarrow \mathbb R\) such that, denoting by \(f^*\) the pull–back of f, we have:
We remark that for \(n=1\) any diffeomorphism is conformally symplectic with \(\lambda \) depending on the coordinates, namely one can take \(\lambda (x)=det(Df(x))\) or \(\lambda (x)=-det(Df(x))\). Instead, for \(n\ge 2\) one obtains that \(\lambda \) is a constant. In fact, taking the exterior derivative of \(f^*\varOmega =\lambda \varOmega \), one obtains:
that gives \(d\lambda =0\); since the manifold is connected, then \(\lambda \) is equal to a constant.
We also remark that for \(\lambda =1\) in (12) we recover the symplectic case.
Let us give some explicit examples which might help to clarify the meaning of Definition 1. First, we notice that we can re-formulate the notion of conformally symplectic by saying that the diffeomorphism f is conformally symplectic if
where the superscript T denotes transposition. In fact, from (12) we have:
An example of a conformally symplectic diffeomorphism is given by the dissipative standard map. Recalling (3), we have that (13) is satisfied, as shown below:
An example of a map which does not satisfy the conformally symplectic condition (13) is given by the following 4-dimensional dissipative standard map with conformal factors \(\lambda _1\), \(\lambda _2\) with \(\lambda _1\not =\lambda _2\):
In fact, even for \(\varepsilon =0\), we obtain that (13) is not satisfied:
To conclude, we give the definition of conformally symplectic systems for continuous dynamical systems.
Definition 2
We say that a vector field X is a conformally symplectic flow if, denoting by \(L_X\) the Lie derivative, there exists a function \(\lambda :\mathbb R^{2n}\rightarrow \mathbb R\) such that
In analogy to the definition of conformally symplectic maps, we remark that the time t-flow \(\varPhi _t\) satisfies the relation
3.2 Diophantine Vectors for Maps and Flows
In this section we give the definition of Diophantine vectors for maps and flows and we briefly recall the main properties of Diophantine vectors. We start by giving the definition for maps.
Definition 3
We say that the vector \({\underline{\omega }}\in \mathbb R^n\) satisfies the Diophantine condition, if for a constant \(C>0\) and an exponent \(\tau >0\), one has
In the case of flows we have the following definition.
Definition 4
We say that the vector \({\underline{\omega }}\in \mathbb R^n\) satisfies the Diophantine condition, if for a Diophantine constant \(C>0\) and a Diophantine exponent \(\tau >0\), one has:
We conclude this section by listing below some important properties of Diophantine vectors.
(i) Let us denote by \(\mathcal D(C,\tau )\) the set of Diophantine vectors satisfying Definition 4. Then, the size of the set of Diophantine vectors \(\mathcal D(C,\tau )\) increases as C or \(\tau \) increases. The set of vectors that satisfy this condition for some \(C,\tau \) is of full Lebesgue measure in \(\mathbb R^n\).
(ii) There are no Diophantine vectors in \(\mathbb R^n\) with \(\tau <n-1\).
(iii) The set of Diophantine vectors with \(\tau =n-1\) in \(\mathbb R^n\) has zero Lebesgue measure, but it is everywhere dense.
(iv) For \(\tau >n-1\), almost every vector in \(\mathbb R^n\) is \(\tau \)-Diophantine, namely the complement has zero Lebesgue measure, although it is everywhere dense.
4 Invariant Tori and KAM Theory for Conformally Symplectic Systems
In this Section we provide the definition of KAM (rotational) invariant tori (for maps and flows) (see Sect. 4.1); the statement of the KAM theorem for conformally symplectic maps is given in Sect. 4.2, whose proof is briefly recalled in Sect. 4.3. The proof can be translated into a very efficient KAM algorithm (see [21]), which is at the basis of different results: the derivation of numerical methods to compute the breakdown threshold (Sect. 5), the investigation of the breakdown mechanism (Sect. 6), the implementations to specific models (see Sect. 7).
4.1 Invariant KAM Tori
We start by giving the definition of conditionally periodic and quasi-periodic motions.
Definition 5
A conditionally periodic motion is represented by a function \(t\mapsto f(\omega _1 t,\ldots ,\omega _n t)\), where \(f(x_1,\ldots , x_n)\) is periodic in all variables; the vector \({\underline{\omega }}=(\omega _1,\ldots ,\omega _n)\) is called frequency.
A quasi-periodic motion is a conditionally periodic motion with incommensurable frequencies.
Next we give the following definition of invariant torus.
Definition 6
An invariant torus is a manifold diffeomorphic to the standard torus \(\mathbb T^n\), that gets mapped into itself by the evolution.
We remark that any trajectory on an invariant torus carrying quasi-periodic motions is dense on the torus. We conclude by giving the definition of (rotational) KAM torus for maps and flows. This definition is based on the invariance equation (14) below, whose solution will be the centerpiece of the KAM theorem presented in Sect. 4.2.
Definition 7
Let \(\mathcal{M}\subseteq \mathbb R^n\times \mathbb T^n\) be a symplectic manifold and let \(f:\mathcal{M} \rightarrow \mathcal{M}\) be a symplectic map. A KAM torus with frequency \({\underline{\omega }}\in \mathcal D(C,\tau )\) is an n–dimensional invariant torus described parametrically by an embedding \(K:\mathbb T^n \rightarrow \mathcal{M}\), which is the solutions of the invariance equation:
For a family \(f_{\underline{\mu }}\) of conformally symplectic diffeomorphisms depending on a real parameter vector \({\underline{\mu }}\), a KAM attractor with frequency \({\underline{\omega }}\in \mathcal D(C,\tau )\) is an n–dimensional invariant torus described parametrically by an embedding \(K:\mathbb T^n \rightarrow \mathcal{M}\) and a drift \(\underline{\mu }\), which are the solutions of the invariance equation:
For conformally symplectic vector fields \(X_{\underline{\mu }}\), the invariance equation is given by
We remark that for symplectic systems the invariance equation (14) contains as only unknown the embedding K, while for conformally symplectic systems the invariance equation (15) contains as unknowns both the embedding K and the drift term \({\underline{\mu }}\).
A graphical representation of the invariance equation (14) is given in Fig. 6.

Geometric interpretation of the invariance equation \(f_{\underline{\mu }}\circ K({\underline{\theta }})=K({\underline{\theta }}+{\underline{\omega }})\) in the unknowns K, \({\underline{\mu }}\)
Although the theory that will be presented in the next Sections apply both to maps and flows, for simplicity of exposition we will limit to the presentation of KAM theory for maps. We refer to [21] for the details concerning continuous systems.
4.2 Conformally Symplectic KAM Theorem
We will try to answer a specific question, which is formulated below, by means of a suitable statement of the KAM theorem; the question is motivated by many applications in several models of Celestial Mechanics, which are often described by nearly-integrable systems. This is why we set the following question in the framework of nearly-integrable systems, although the formulation of KAM theory does not need that the system is close to integrable (compare with [44]).
Assume that a given integrable dynamical system admits an invariant torus run by a quasi-periodic motion with frequency \(\underline{\omega }\) (e.g., think at Kepler’s 2-body problem). Consider a perturbation of the integrable system (e.g., the restricted 3-body problem, which is described by the 2-body problem with a perturbation proportional to the primaries’ mass ratio). The main question that we want to raise in the framework of KAM theory for nearly-integrable systems is the following: does the perturbed system still admits an invariant torus run by a quasi-periodic motion with the same frequency as the unperturbed system? The answer is given by the celebrated KAM theory ([2, 78, 90]), which can be implemented under very general assumptions, precisely a non-degeneracy condition of the unperturbed system and a Diophantine condition on the frequency.
We remark that invariant tori are Lagrangian: if f is a symplectic map and K satisfies the invariance Eq. (14), then
The same holds for a conformally symplectic map \(f_{\underline{\mu }}\), when \(|\lambda | \ne 1\) and K satisfies the invariance Eq. (15). If f is symplectic and \(\underline{\omega }\) is irrational, then the torus is Lagrangian, i.e. with maximal dimension and isotropic (namely, the symplectic form restricted on the manifold is zero, which implies that each tangent space is an isotropic subspace of the ambient manifold’s tangent space).
Next step is to consider a nearly-integrable dynamical system affected by a dissipative force, so that the overall system is conformally symplectic (an example is given by the spin-orbit problem with tidal torque). We assume that the integrable symplectic system admits an invariant torus with Diophantine frequency; the question becomes whether the non-integrable system with dissipation still admits, for suitable values of the drift parameter, an invariant attractor run by a quasi-periodic motion with the same frequency of the unperturbed system. The answer is given by the KAM theorem for conformally symplectic systems as given by Theorem 1 (see [21]).
Since we will be interested to give explicit estimates in specific model problems, we introduce the following norms for analytic and differentiable functions.
Definition 8
Analytic norm. Given \(\rho >0\), we define the complex extension of the torus, say \(\mathbb T_\rho ^n\), as the set
we denote by \(\mathcal{A}_{\rho }\) the set of analytic functions in \(Int(\mathbb T_\rho ^n)\) with the norm
Sobolev norm. For a function \(f=f({\underline{z}})\) expanded in Fourier series as \(f({\underline{z}}) = \sum _{{\underline{k}}\in {\mathbb Z}^n} \widehat{f_{\underline{k}}}\ e^{2\pi i{\underline{k}}\cdot {\underline{z}}}\) for an integer \(m>0\), we define the space \(H^m\) as
Borrowing the statement from [21], we give below the formulation of the KAM theorem for conformally symplectic systems (see [44] for the statement for symplectic systems). We give the statement for maps, although the results can be formulated also for systems with continuous time (flows). Indeed in [21] one can find a construction that shows that the results for maps imply the results for flows as well as direct proofs of the results for flows.
Theorem 1
Let \({\underline{\omega }}\in \mathcal D(C,\tau )\), \(f_{\underline{\mu }}:\mathbb R^n\times \mathbb T^n\rightarrow \mathbb R^n\times \mathbb T^n\) be a conformally symplectic diffeomorphism, and let \((K,{\underline{\mu }})\) be an approximate solution of the invariance equation (15) with error term E:
Let N be the quantity
and let \(M({\underline{\theta }})\) be the \(2n\times 2n\) matrix defined by
Let \(P({\underline{\theta }})\) be defined as
let \(A({\underline{\theta }}) \equiv \lambda \,\mathrm Id\) and let \(S({\underline{\theta }})\) be
with
Assume that the following non–degeneracy condition is satisfied:
with \(\widetilde{A}_1\), \(\widetilde{A}_2\) the first and second n columns of \(\tilde{A}=M^{-1}({\underline{\theta }}+{\underline{\omega }}) D_{\underline{\mu }} f_{\underline{\mu }} \circ K\), \(B^0=B-\langle B\rangle \) is the solution of \(\lambda B^0({\underline{\theta }})-B^0({\underline{\theta }}+{\underline{\omega }})=-(\widetilde{A}_2)^0({\underline{\theta }})\).
For \(\rho >0\), let \(0<\delta <{\rho \over 2}\); if the solution is sufficiently approximate, namely
for a suitable constant \(C_3>0\), then there exists an exact solution \((K_e,{\underline{\mu }}_e)\), such that
with suitable constants \(C_4,C_5>0\).
Remark 1
It is useful to make a remark on the non–degeneracy condition (18), when applied to the conservative and dissipative standard maps ((1) and (3)). For the conservative standard map, the non–degeneracy condition is typically the so-called twist condition, which can be written as
implying that the lift of the map transforms any vertical line always on the same side.
Instead, for the dissipative standard map, that we modify adding a generic dependence on the drift through a function \(p=p(\mu )\), \(\mu \in \mathbb R\), say
then the non–degeneracy condition involves the twist condition and a non–degeneracy condition with respect to to the parameters, namely:
We remark, however, that (19) and (20) involve global properties of the system, while (18) is a condition involving just the approximate solution, so that (18) may be applied in situations where (19) and (20) fail.
The proof of Theorem 1 is given in [21] through the a-posteriori approach developed in [44] and making use of an adjustment of parameters (see [9, 92]): assume we can find an approximate solution \((K,{\underline{\mu }})\) of the invariance equation, satisfying a non-degeneracy condition, then we can find a true solution \((K_e,{\underline{\mu }}_e)\) close to \((K,{\underline{\mu }})\), such that \(\Vert K_e-K\Vert \), \(|{\underline{\mu }}_e-{\underline{\mu }}|\) is small. A sketch of the proof of Theorem 1 is presented in Sect. 4.3.
We conclude this Section by remarking that the a-posteriori approach presents several advantages, among which:
-
(i) it can be developed in any coordinate frame and not necessarily in action-angle variables. In many practical problems, the action-angle variables are difficult to compute and involve complex singularities. Of course, once we have the existence of the torus, we can construct action angle variables. Hence, compared to more standard results, the accomplishment of the method is that the existence of action variables and the quasi-integrability is moved from the hypothesis to the conclusions. This is useful in practice since the hypothesis is hard to verify in applications.
-
(ii) The system is not assumed to be nearly integrable.
-
(iii) Instead of constructing a sequence of coordinate transformations on shrinking domains as in the perturbation approach, one computes suitable corrections to the embedding and the drift. The computation of the embeddings requires to work only with variables of n dimensions whereas transformation theory requires to work with variables in 2n dimensions. The complexity of representing functions grows exponentially – with a large exponent – with the dimension. The composition of two functions has rather awkward analytic and numerical properties.
-
(iv) The non-degeneracy assumptions are not global properties of the map, but are rather properties of the considered approximate solution.
-
(v) One does not need to justify how the approximate solution was obtained. In particular, one can take as approximate solution the result of numerical calculations or a formal expansion.
Verifying the hypothesis in a numerical approximation requires just a finite number of calculations. Even if this number is too large to do by hand, it could be moderate to do with a computer (e.g., a few hours on a common laptop). If these can be done taking care of roundoff and truncation errors, this may lead to a computer assisted proof.
One can also verify the hypothesis easily in a numerical expansion.
4.3 A Sketch of the Proof of the KAM Theorem
The proof of Theorem 1 can be summarized as composed by five main steps:
-
Step 1: starting from an approximate solution, write the linearization of the invariance equation.
-
Step 2: by a Newton’s method find a quadratically smaller approximation.
-
Step 3: under a non–degeneracy condition, solve the cohomological equation that allows to find the new approximation.
-
Step 4: iterate the procedure and show its convergence.
-
Step 5: prove that the solution is locally unique.
We briefly describe such steps as follows.
4.3.1 Step 1: Approximate Solution and Linearization
Let \((K,{\underline{\mu }})\) be an approximate solution satisfying
Using the Lagrangian property \(K^*\varOmega =0\) written in coordinates, namely
we get that the tangent space is given by
with N as in (16) and
Define the quantity
Then, we have the following result.
Lemma 1
Up to a remainder R, we have the following relation:
Proof
Recalling the definition of M in (23), we have that taking the derivative of
one obtains the relation
Due to (22), one obtains:
with S as in (17).
4.3.2 Step 2: Determine a New Approximation.
Let the new approximation \((K',{\underline{\mu }}')\) be defined as \(K'=K+M W\), \({\underline{\mu }}'={\underline{\mu }}+{\underline{\sigma }}\). Let \(E'\) be the error associated to \((K',{\underline{\mu }}')\):
Expanding (24) in Taylor series, we get
Recalling (21), the new error \(E'\) is quadratically smaller provided the following relation holds:
Combining (25) and Lemma 1, we have:
This allows to get the following equations for \(W=(W_1,W_2)\) and \({\underline{\sigma }}\)
that we are going to make more explicit. Multiplying by \(M({\underline{\theta }}+{\underline{\omega }})^{-1}\) and writing \(W=(W_1,W_2)\), one gets that the previous equation is equivalent to:
with \(\tilde{E}_j({\underline{\theta }})=-(M({\underline{\theta }} +{\underline{\omega }})^{-1}E)_j\), \(\tilde{A}_j({\underline{\theta }})=(M({\underline{\theta }} +{\underline{\omega }})^{-1}D_{\underline{\mu }} f_{\underline{\mu }}\circ K)_j\). Writing (26) in components, we obtain:
The cohomological equations (27) allow to find the corrections \(W_1\), \(W_2\) and \(\underline{\sigma }\), as sketched in the next step.
4.3.3 Step 3: Solve the Cohomological Equations
To determine the new approximation, we need to solve equations (27), which are equations with constant coefficients for \(W_1\), \(W_2\) and \(\sigma \) for known S, \(\widetilde{E}\equiv (\widetilde{E}_1,\widetilde{E}_2)\), \(\widetilde{A}\equiv [\widetilde{A}_1|\ \widetilde{A}_2]\).
The first equation in (27) is a standard small divisor equation, which can be solved under the Diophantine condition on the frequency, so to bound the small divisors.
For \(|\lambda |\ne 1\) and for all real vectors \({\underline{\omega }}\), it is possible to solve the second equation in (27) by an elementary contraction mapping argument.
We remark that, using Cauchy estimates for the cohomological equations (27), we can bound \(\Vert W_1\Vert _{\rho -\delta }\) and \(\Vert W_2\Vert _{\rho -\delta }\) by \(\Vert E\Vert _\rho \).
To solve the cohomological equations, we proceed as follows. Take the averages of each equation in (27) and use the non–degeneracy condition to determine \(\langle W_2\rangle \), \({\underline{\sigma }}\) by solving the equation
where we have split \(W_2\) as \(W_2=\langle W_2\rangle +B^0+\tilde{B}^0 {\underline{\sigma }}\).
Next, we need to solve the second equation in (27) for \(W_2\), which is an equation of the form \(\lambda W_2({\underline{\theta }})-W_2({\underline{\theta }}+{\underline{\omega }})=Q_2({\underline{\theta }})\) with \(Q_2\) known. Such equation is always solvable for any \(|\lambda |\not =1\) by a contraction mapping argument, using that \(\lambda W_2({\underline{\theta }})-W_2({\underline{\theta }}+{\underline{\omega }}) =\sum _{\underline{k}} \widehat{W}_{2,{\underline{k}}}\, e^{i{\underline{k}}\cdot {\underline{\theta }}}(\lambda -e^{i{\underline{k}}\cdot {\underline{\omega }}})\).
Finally, we solve the first equation in (27) for \(W_1\), which amounts to solving an equation of the form \(W_1({\underline{\theta }})-W_1({\underline{\theta }}+{\underline{\omega }})=Q_1({\underline{\theta }})\) with \(Q_1\) known. It involves small (zero) divisors, since for \({\underline{k}}={\underline{0}}\) one has \(1-e^{i{\underline{k}}\cdot {\underline{\omega }}}=0\). The left hand side of the first equation in (27) can be expanded as
To get a bound for the solution of (27), we need the following result.
Proposition 1
Let \(Z=Z({\underline{\theta }})\) be a function with zero average and such that \(Z\in \mathcal{A}_\rho \) or \(Z\in H^m\). Let \({\underline{\omega }}\in D(C,\tau )\). Assume that the function \(U=U({\underline{\theta }})\) satisfies
Then, if \(\lambda \not =1\), \(|\lambda |\in [A,A^{-1}]\) for \(0<A<1\), we have that
We refer to [21, 102] for the proof of Proposition 1.
4.3.4 Step 4: Convergence of the Iterative Step.
The solution described in Step 3, allows to state that the invariance equation is satisfied with an error quadratically smaller, i.e.
The procedure at Step 3 can be iterated to get a sequence of approximate solutions, say \(\{K_j,{\underline{\mu }}_j\}\). Its convergence is obtained through an abstract implicit function theorem, alternating the iteration with carefully chosen smoothing operators defined in a scale of Banach spaces (which can be either analytic functions or Sobolev spaces).
4.3.5 Step 5: Local Uniqueness
Under smallness conditions, one can prove that, if there exist two solutions \((K_a,{\underline{\mu }}_a)\), \((K_b,{\underline{\mu }}_b)\), then there exists \({\underline{\psi }}\in \mathbb R^n\) such that
We remark that in the analytic case, the smoothing is obtained by rescaling the size of the strip on which the analytic functions are defined at each step, given that the domains where they are defined shrink by a given amount. Then, for the sequence of solutions \(\{K_j,{\underline{\mu }}_j\}\), one can take the analyticity domain parameters \(\rho _h\) and the shrinking parameters \(\delta _h\) as
Given that the error is quadratic, we can write for some \(a,b>0\) and a constant \(C_E>0\):
If the quantity \(\varepsilon _0\equiv \Vert E(K_0,{\underline{\mu }}_0)\Vert _{\rho _0}\) is small enough, then one can prove that
for some constants \(C_K,C_\mu >0\). A finite number of conditions on parameters and norms will imply the indefinite iterability of the procedure and its convergence.
The a-posteriori approach for conformally symplectic systems has a number of consequences and further developments that we briefly summarize below, referring to the cited literature for full details:
-
the method provides an efficient algorithm to determine the breakdown threshold, very suitable for computer implementations [15];
-
the a-posteriori method allows to find rigorous lower estimates of the breakdown threshold [56, 97]. The rigorous lower estimates for symplectic maps in [56, 97] are very close to to the rigorous upper estimates in [67]. In [26] one can find very detailed estimates (they do not control completely the round off error, but they control everything else), that are comparable with the best numerical estimates computed by other methods;
-
one gets that the local behavior near quasi–periodic solutions is given by a rotation in the angles and a shrink in the actions [22];
-
the method allows to obtain a partial justification of Greene’s criterion for the computation of the breakdown threshold of invariant attractors [27];
-
one obtains a bootstrap of regularity, which allows to state that all smooth enough tori are analytic, whenever the map is analytic [21];
-
one gets a characterization of the analyticity domains of the quasi–periodic attractors in the symplectic limit [23];
-
one can prove the existence of whiskered tori for conformally symplectic systems [24].
Concerning the first item above, we stress that the proof given in [21] leads to a very efficient KAM algorithm, which can be implemented numerically and it is shown to work very close to the boundary of validity [26]. Indeed, all steps of the algorithm involve diagonal operations in the Fourier space and/or diagonal operations in the real space. Moreover, if we represent a function in discrete points or in Fourier space, then we can compute the other functions by applying the Fast Fourier Transform (FFT). Using N Fourier modes to discretize the function, then we need O(N) storage and \(O(N\log N)\) arithmetic operations. Note that all the steps in the algorithm can be implemented in a few lines in a high level language so that the resulting algorithm is not very hard to implement (about 200 lines in Octave, see [52], and about 2000 lines in C). Even if the above transcription of the algorithm works extremely well in near integrable systems, when approaching the breakdown, one needs to take some standard precautions (e.g. monitoring the size of the tails of Fourier series).
We also remark that the KAM proof requires a computer to make very long computations, which are needed to determine, for example, the initial approximate solution or to check the KAM algorithm. However, the computer introduces rounding-off and propagation errors, which can be controlled through interval arithmetic for which we refer to the specialized literature (see, e.g., [61, 74, 80, 89]).
5 Breakdown of Quasi–periodic Tori and Quasi–periodic Attractors
The analytical estimates which can be obtained through the implementation of the KAM theorem represent a rigorous lower bound of the breakdown threshold of invariant tori. In problems with a well-defined physical meaning, one can compare the KAM results with a measure of the parameter(s). For example in the restricted 3-body problem, one aims to prove the theorem for the true value of the mass ratio of the primaries. If we consider an asteroid under the gravitational attraction of Jupiter and the Sun, then the mass ratio amounts to \(\varepsilon \simeq 10^{-3}\), which represents the benchmark that one wants to reach through rigorous KAM estimates.
Model problems like the standard maps do not have a physical reference value; therefore, one needs to apply numerical techniques that allow to determine the KAM breakdown threshold. Among the others, we mention Greene’s technique [59], frequency analysis [81], Sobolev’s method [15].
In the next Sections we review two methods for the numerical computation of the breakdown threshold that have been successfully applied to the standard map [15, 16, 59]: one is based on Sobolev’s method (Sect. 5.1) and the other is based on Greene’s method (Sect. 5.2). The problem of breakdown of KAM tori has been studied by many methods. The paper [16] contains a small survery and comparison of several different methods, some of which we will not mention here.
5.1 Sobolev Breakdown Criterion
To illustrate the method, we focus on the specific examples of the conservative and dissipative standard maps; hence we have a two-dimensional discrete system, which can be parametrized by a one-dimensional variable \(\theta \in \mathbb T\). In particular, in the conservative case we write the invariance equation for K as
while in the dissipative case we write the invariance equation for \((K,\mu )\) as
As shown rigorously in [16] for the conservative case and in [15] for the dissipative case, the continuation method based in the constructive Newton method can (if given enough computer resources) reach arbitrarily close to the breakdown. Furthermore, the breakdown of analytic tori happens if and only if some Sobolev norm of sufficiently high order blows up.
This rigorous result can, of course, be readily implemented. Today’s computers, of course, do not have infinite resources, but they are fairly impressive for people who started to work with a PDP-11 with 16K of RAM. Since the algorithms we describe are based on computing Fourier series, one can get readily the Sobolev norms of the embedding K and monitor their blow up.
The blow up of the Sobolev norm gives a clear indication that the torus is breaking down. Note that, given the a-posteriori theorem, and the bootstrap of regularity results, if the norm of the computed solution is not blowing up, it is a very clear indication that the torus is there.
Remark 2
Something that increases the possible effectiveness of this method is that it has been found empirically that the blow up of Sobolev norms is given by power laws whose exponents are universal. Even if this is mainly an empirical observation (that needs to be somehow tone down since [16] contains several warnings for some maps), it can improve dramatically the computation of breakdowns. Many of these empirical results are organized using Renormalization Group methods [88, 98,99,100]. Even if some aspects of renormalization group have been made rigorous [73, 75,76,77, 107, 108], much more mathematical work seems to remain.
We implement the method for the conservative and dissipative standard maps (1) and (3), computing in Table 1 the value of \(\varepsilon _{crit}\) for the frequency equal to the golden ratio: \(\omega = 2\pi {{\sqrt{5}-1}\over 2}\). The result in the conservative case is in full agreement with the value which can be obtained by implementing Greene’s method (see [59]). The values for the dissipative case given in Table 1 will be compared in Sect. 5.2 to those obtained implementing a version of Greene’s method for the dissipative standard map.
In Fig. 7, we present the existence domain of the dissipative standard map (3) with a two harmonic potential given by

Existence domain for invariant circles of the dissipative standard map with potential (29). Left: \(\lambda =0.9\). Right: \(\lambda =0.1\)
We call attention to the fact that this region contains parts with smooth boundaries, but–specially in the conservative case–it contains some parts of the boundary that are rather ragged. A tentative explanation ([85]) is that the smooth parts of the the boundary of the region of existence are the intersection of the family considered with the stable manifold of fixed point of renormalization. Even if this is not a completely rigorous picture, there has been significant mathematical progress in verifying it in an open set of families. We hope that, in the future, there could be more progress in this area.
One important advantage of the Sobolev method is that it can be programmed systematically and run unattended. The Greene’s method relies on periodic orbits and one has to pay attention to making sure that the periodic orbits are continued correctly. We also note that the Sobolev method works for models of long range interaction in Statistical Mechanics without a dynamical interpretation.

Left: Arnold’s tongues providing \(\mu \) versus \(\varepsilon \) for three periodic orbits of the dissipative standard map with periods 1/3, 1/2, 2/3. Right: periodic orbits of the dissipative standard map approximating the golden mean curve
5.2 Greene’s Method, Periodic Orbits and Arnold’s Tongues
The method by J. Greene, developed for the standard map in [59], is based on the conjecture that the breakdown of an invariant curve with frequency \(\omega \), say \(\mathcal C(\omega )\), is related to a change from stability to instability of the periodic orbits \(\mathcal P({{p_j}\over {q_j}})\) with frequencies \({{p_j}\over {q_j}}\), \(j=1,2,...\), tending to \(\omega \). We observe that a standard procedure to obtain the rational approximants of \(\omega \) is to compute the successive truncations of the continued fraction representation of \(\omega \).

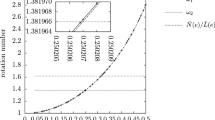
Left: periodic orbits with increasing periods, approximating the golden mean curve. Right: the corresponding drift parameters with the successive periodic orbits labeled by integer numbers on the x-axis
Greene’s method has been successfully developed for the conservative standard map for which a partial justification is given in [54, 85]. In the dissipative case, there appears an extra difficulty due to the fact that the periodic orbits with frequency \({{p_j}\over {q_j}}\) occur in a whole interval of the drift parameter. This phenomenon gives rise to the appearance of the so-called Arnold tongues. Figure 8, left panel, gives a graphical representation of the Arnold tongues; having fixed a value of the dissipative parameter \(\varepsilon \), there is a whole interval of the drift parameter \(\mu \) which admits a periodic orbit of the same period. The right panel of Fig. 8 shows several periodic orbits approaching the torus with frequency equal to the golden mean; such periodic orbits have frequency equal to the rational approximants which are given by the ratio of the Fibonacci numbers.
A partial justification of an extension of Greene’s criterion in the conformally symplectic case is presented in [27], where it is proved that if there exists a smooth invariant attractor, one can predict the eigenvalues of the periodic orbits approximating the torus for parameters close to those of the attractor.
Figure 9 shows some approximating periodic orbits (left panels) and the corresponding behaviour of the drift parameter (right panels) that, in the limit, tends to the value of the drift that corresponds to the golden mean torus.
We also call attention to [37] which contains tentative results on the non-existence of invariant tori for the spin-orbit models. Even if the methods developed there are not rigorous, they may present a counterpoint to the methods to study the existence.
6 Collision of Invariant Bundles of Quasi-periodic Attractors
Quasi-periodic attractors of conformally symplectic maps are normally hyperbolic invariant manifolds (NHIM). As developed in [20] for the dissipative standard map, one can obtain the Lyapunov multipliers of the attractor from a simple computation. We start from the invariance Eq. (28) for a pair \((K, \mu )\). We then introduce a change of variables to reduce the cocycle. Let \(\tilde{M}(\theta )=[DK(\theta )\,|\,E^s(\theta )]\), \(\theta \in \mathbb T\), be the matrix whose columns are the tangent and stable bundles of \(\mathcal {K} = K(\mathbb T^n)\):
From Eq. (30) we can write the stable bundle as follows
where \(B(\theta )\) is the function that satisfies
Indeed, after j iterates of the map we have that,
which shows that the tangent space of \(\mathcal M\) at \(K(\theta )\) is
We can conclude that there exists a constant C such that
showing that \(\mathcal K=K(\mathbb T^n)\) is a NHIM. Equation (30) also tells us that the Lyapunov multipliers are constant along the family of quasi-periodic attractors for fixed Diophantine vectors.
In the case of maps of the cylinder \(\mathcal {M} = \mathbb R \times \mathbb T\), we know that the curve \(\mathcal K\) is \(C^r\), one dimensional, and since \(\omega \) satisfies the Diophantine condition, we know by the results of [66, 68, 69, 71] that the map conjugating the dynamics in \(\mathcal K\) to a rigid rotation is in \(C^{r-\tau -\delta }\) for a small \(\delta > 0\). Therefore, by the bootstrap of regularity resultsFootnote 1, the conjugacy is analytic for analytic maps. Since the bundles depend on the conjugacy, then the regularity of the manifold implies the analyticity of K and the bundles up to the breakdown.
To investigate the breakdown of normal hyperbolicity, we note that, because of the pairing rule of Lyapunov exponents [51, 115], since one Lyapunov multiplier is 1—the one along the tangent directional (remember that the map on the torus is smoothly conjugate to the torus)—the other one is precisely \(\lambda \).
We recall that hyperbolicity is equivalent to the existence of transversal invariant bundles with different rates. In our case, if the tori have to cease to be normally hyperbolic, because the exponents remain constant, the only thing that can happen is that the transversality of the bundles deteriorates.
What is found empirically is that the breakdown happens because at the same time the regularity of the conjugacy deteriorates quantitatively (even if the conjugacy remains analytic, some Sobolev norm blows up). See [20] for full details.
At the same parameter values, the breakdown of hyperbolicity happens via the stable and tangent bundle collision. Even if the Lyapunov exponents remain safely away, the transversality deteriorates and the tangent and stable bundles become close to tangent.
In the case at hand, we can make a very detailed study: the bundles are one dimensional and we compute a formula for the angle between the bundles for every \(\theta \). In fact, let \(\alpha (\theta )\) be the angle between the stable and tangent bundles for every \(\theta \in \mathbb T\), then we have
This formula says that the angle \(\alpha (\theta )\) goes to zero at points where the functions in the denominator go to infinity.
We present figures (see Fig. 10) of the angle between the bundles close to the breakdown.

Reproduced from [17]
Invariant bundles close to their collision. Left: dissipative standard map. Right: dissipative standard non-twist map.
Rather remarkably these two phenomena (the blow up of Sobolev norms and the stable bundles and the tangent becoming parallel) happen at the same time and present very unexpected regularities. There are scaling relations that seem to be independent of the family considered and they happen in codimension 1 smooth submanifolds in the space of maps. We think that this is a very interesting mathematical phenomenon that deserves rigorous study. It seems quite unlikely that it would have been discovered except for the very careful numerics that can explore with confidence close to the breakdown. Such delicate numerics are only possible because of the rigorous mathematical development.
7 Applications
In this Section we want to briefly review some constructive applications of KAM theory for conservative and dissipative models. We will consider applications to the standard map and to the spin-orbit problem, both in the conservative and dissipative settings. Although we will not present other applications of KAM theory, it is worth mentioning also the constructive KAM results to the N-body and planetary problems in Celestial Mechanics ([94]); in this context, for results obtained in the conservative framework we refer the reader to [30,31,32, 58, 103] and to [38] for numerical investigations including dissipative effects.
7.1 Applications to the Standard Maps
The first applications of computer-assisted KAM proofs have been given for the conservative standard map; these results show that the golden mean torus persists for values of the perturbing parameter equal to \(93\%\) of the numerical breakdown value (see [45, 46]); we also mention [29] which, at the same epoch but using a different approach than [45, 46], reached \(86\%\) of the numerical breakdown value.
Rigorous estimates for the conservative standard map using the a-posteriori method have been proved in the remarkable paper [56], where for the twist and non-twist conservative standard maps the golden mean torus is proved to persist for values of the perturbing parameter as high as 99.9% of the numerical breakdown value.
For the dissipative standard map, the paper [26] analyzes the persistence of the invariant attractor with frequency equal to the golden mean and for a fixed value of the dissipative parameter (precisely \(\lambda =0.9\)); such persistence is shown for values of the perturbing parameter equal to 99.9% of the breakdown value, where the numerical value has been obtained through the techniques presented in Sects. 5.1 and 5.2.
7.2 Applications to the Spin–Orbit Problems
The first application of KAM theory to the conservative spin-orbit problem is found in [33, 34]. In those articles some satellites in synchronous spin-orbit resonance have been considered; the synchronous or 1:1 spin-orbit resonance implies that the satellite always points the same face to the host planet. In particular, the following satellites have been considered: the Moon, and three satellites of Saturn, Rhea, Enceladus, Dione. Being the normalized frequency (namely, the ratio between the rotational and orbital frequency) equal to one, two Diophantine numbers bounding unity from above and below have been considered. Through a computer-assisted KAM theorem, the existence of invariant tori with frequency equal to the bounding numbers have been established for the true values of the parameters of the satellites, namely the eccentricity and the equatorial oblateness.
Such result guarantees the stability for infinite times in the sense of confinement in the phase space. In fact, the phase space associated to the Hamiltonian describing the conservative spin-orbit problem is 3-dimensional; since the KAM tori are 2-dimensional, one gets a confinement of the motion between the bounding invariant tori.
We remark that the confinement is no more valid for \(n>2\) degrees of freedom, since the motion can diffuse through invariant tori, reaching arbitrarily far regions; this phenomenon is known as Arnold’s diffusion [4] for which we refer to the extensive literature on this topic (see, e.g., [49, 57] and references therein).
For the dissipative spin-orbit problem, we refer to [19, 36, 87, 105] for the development of KAM theory for a model of spin-orbit interaction with tidal torque as in (11). Precisely, for \(\lambda _0\in {\mathbb R_+}\) and \(\omega \) Diophantine, it is proven that there exists \(0<\varepsilon _0<1\), such that for any \(\varepsilon \in [0,\varepsilon _0]\) and any \(\lambda \in [-\lambda _0,\lambda _0]\) there exists a unique function \(K=K(\theta ,t)\) and a drift term \(\mu \) which is the solution of the invariance equation for the dissipative spin-orbit model.
Explicit estimates for the dissipative spin-orbit problem, even in the more general case with a time-dependent tidal torque as in (9), are given in [19] (see also [105]). Here, the a-posteriori method is implemented to construct invariant attractors with Diophantine frequency; the results are valid for values of the perturbing parameter consistent with the astronomical quantities and very close to the numerical breakdown threshold, which has been computed in [28] through Sobolev and Greene’s method (see also [106]).
Notes
- 1.
i.e., all tori which are smooth enough are analytic if the map is analytic ([21]).
References
Agrachëv, A.A.: Invariant Lagrangian submanifolds of dissipative systems. Uspekhi Mat. Nauk 65(5(395)), 185–186 (2010)
Arnol’d, V.I.: Proof of a theorem of A. N. Kolmogorov on the invariance of quasi-periodic motions under small perturbations. Russian Math. Surv. 18(5), 9–36 (1963)
Arnol’d, V.I.: Small denominators and problems of stability of motion in classical and celestial mechanics. Russian Math. Surv. 18(6), 85–191 (1963)
Arnold, V.I.: Instability of dynamical systems with several degrees of freedom. Sov. Math. Doklady 5, 581–585 (1964)
Banyaga, A.: Some properties of locally conformal symplectic structures. Comment. Math. Helv. 77(2), 383–398 (2002)
Bensoussan, A.: Perturbation Methods in Optimal Control. Wiley/Gauthier-Villars Series in Modern Applied Mathematics. Wiley, Chichester (1988). Translated from the French by C. Tomson
Bohr, T.: A bound for the existence of invariant circles in a class of two-dimensional dissipative maps. Phys. Lett. A 104(9), 441–443 (1984)
Bohr, T., Bak, P., Jensen, M.H.: Transition to chaos by interaction of resonances in dissipative systems. II. Josephson junctions, charge-density waves, and standard maps. Phys. Rev. A (3) 30(4), 1970–1981 (1984)
Broer, H.W., Huitema, G.B., Sevryuk, M.B.: Families of quasi-periodic motions in dynamical systems depending on parameters. In: Nonlinear Dynamical Systems and Chaos (Groningen, 1995), pp. 171–211. Birkhäuser, Basel (1996)
Broer, H.W., Huitema, G.B., Sevryuk, M.B.: Quasi-Periodic Motions in Families of Dynamical Systems, Order Amidst Chaos. Springer, Berlin (1996)
Broer, H.W., Huitema, G.B., Takens, F., Braaksma, B.L.J.: Unfoldings and bifurcations of quasi-periodic tori. Mem. Am. Math. Soc. 83(421), viii+175 (1990)
Bustamante, A.P., Calleja, R.C.: Computation of domains of analyticity for the dissipative standard map in the limit of small dissipation. Phys. D 395, 15–23 (2019)
Bustamante, A.P., Calleja, R.C.: Corrigendum and addendum to “Computation of domains of analyticity for the dissipative standard map in the limit of small dissipation” [Physica D 395 (2019) 15–23]. Phys. D 417, Paper No. 132837, 7 (2021)
Bustamante, A.P., de la Llave, R.: Gevrey Estimates for the Asymptotic Expansion of Tori of Weakly Dissipative Systems (2020). https://arxiv.org/abs/2010.06006
Calleja, R., Celletti, A.: Breakdown of invariant attractors for the dissipative standard map. Chaos 20(1), 013121 (2010)
Calleja, R., de la Llave, R.: A numerically accessible criterion for the breakdown of quasi-periodic solutions and its rigorous justification. Nonlinearity 23(9), 2029–2058 (2010)
Calleja, R., Canadell, M., Haro, A.: Non-twist invariant circles in conformally symplectic systems. Commun. Nonlinear Sci. Numer. Simul. 96, Paper No. 105695, 15 (2021)
Calleja, R., Celletti, A., Gimeno, J., de la Llave, R.: Efficient and accurate KAM Tori construction for the dissipative spin-orbit problem using a map reduction. J. Nonlinear Sci. 32(1), Paper No. 4 (2022)
Calleja, R., Celletti, A., Gimeno, J., de la Llave, R.: KAM quasi-periodic tori for the dissipative spin-orbit problem. Commun. Nonlinear Sci. Numer. Simul. 106, Paper No. 106099 (2022)
Calleja, R., Figueras, J.-L.: Collision of invariant bundles of quasi-periodic attractors in the dissipative standard map. Chaos 22(3), 033114, 10 (2012)
Calleja, R.C., Celletti, A., de la Llave, R.: A KAM theory for conformally symplectic systems: efficient algorithms and their validation. J. Diff. Equ. 255(5), 978–1049 (2013)
Calleja, R.C., Celletti, A., de la Llave, R.: Local behavior near quasi-periodic solutions of conformally symplectic systems. J. Dynam. Diff. Equ. 25(3), 821–841 (2013)
Calleja, R.C., Celletti, A., de la Llave, R.: Domains of analyticity and Lindstedt expansions of KAM tori in some dissipative perturbations of Hamiltonian systems. Nonlinearity 30(8), 3151–3202 (2017)
Calleja, R.C., Celletti, A., de la Llave, R.: Existence of whiskered KAM tori of conformally symplectic systems. Nonlinearity 33(1), 538–597 (2020)
Calleja, R.C., Celletti, A., de la Llave, R.: Whiskered KAM tori of conformally symplectic systems. Math. Res. Rep. 1, 15–29 (2020)
Calleja, R.C., Celletti, A., de la Llave, R.: KAM quasi-periodic solutions for the dissipative standard map. Commun. Nonlinear Sci. Numer. Simul. 106, Paper No. 106111 (2022)
Calleja, R.C., Celletti, A., Falcolini, C., de la Llave, R.: An extension of greene’s criterion for conformally symplectic systems and a partial justification. SIAM J. Math. Anal. 46(4), 2350–2384 (2014)
Calleja, R.C., Celletti, A., Gimeno, J., de la Llave, R.: Breakdown threshold of invariant attractors in the dissipative spin-orbit problem. Preprint (2020)
Celletti, A., Chierchia, L.: A constructive theory of Lagrangian tori and computer-assisted applications. In: Dynamics Reported, pp. 60–129. Springer, Berlin (1995)
Celletti, A., Chierchia, L.: On the stability of realistic three-body problems. Commun. Math. Phys. 186(2), 413–449 (1997)
Celletti, A., Chierchia, L.: KAM tori for \(N\)-body problems: a brief history. Celest. Mech. Dynam. Astronom. 95(1–4), 117–139 (2006)
Celletti, A., Chierchia, L.: KAM stability and celestial mechanics. Mem. Am. Math. Soc. 187(878) (2007)
Celletti, A.: Analysis of resonances in the spin-orbit problem in celestial mechanics: higher order resonances and some numerical experiments. II. Z. Angew. Math. Phys. 41(4), 453–479 (1990)
Celletti, A.: Analysis of resonances in the spin-orbit problem in celestial mechanics: the synchronous resonance. I. Z. Angew. Math. Phys. 41(2), 174–204 (1990)
Celletti, A.: Stability and Chaos in Celestial Mechanics. Springer, Published in Association with Praxis Publishing, Berlin, Chichester (2010)
Celletti, A., Chierchia, L.: Quasi-periodic attractors in celestial mechanics. Arch. Ration. Mech. Anal. 191(2), 311–345 (2009)
Celletti, A., MacKay, R.: Regions of nonexistence of invariant tori for spin-orbit models. Chaos 17(4), 043119, 12 (2007)
Celletti, A., Stefanelli, L., Lega, E., Froeschlé, C.: Some results on the global dynamics of the regularized restricted three-body problem with dissipation. Celest. Mech. Dynam. Astronom. 109(3), 265–284 (2011)
Chierchia, L., Gallavotti, G.: Smooth prime integrals for quasi-integrable Hamiltonian systems. Nuovo Cimento B (11) 67(2), 277–295 (1982)
Chirikov, B.V.: A universal instability of many-dimensional oscillator systems. Phys. Rep. 52(5), 264–379 (1979)
Ciocci, M.-C., Litvak-Hinenzon, A., Broer, H.: Survey on dissipative KAM theory including quasi-periodic bifurcation theory (H. Broer). London Mathematical Society Lecture Note Series, pp. 303–356. Cambridge University Press (2005)
Correia, A.C.M., Laskar, J.: Mercury’s capture into the 3/2 spin-orbit resonance as a result of its chaotic dynamics. Nature 429(6994), 848–850 (2004)
de la Llave, R.: A tutorial on KAM theory. Smooth ergodic theory and its applications (Seattle. WA, 1999). Am. Math. Soc. Providence, RI 175–292 (2001)
de la Llave, R., González, A., Jorba, À., Villanueva, J.: KAM theory without action-angle variables. Nonlinearity 18(2), 855–895 (2005)
de la Llave, R., Rana, D.: Accurate strategies for small divisor problems. Bull. Am. Math. Soc. (N.S.) 22(1), 85–90 (1990)
de la Llave, R., Rana, D.: Accurate strategies for K.A.M. bounds and their implementation. In: Computer Aided Proofs in Analysis (Cincinnati. OH, 1989), pp. 127–146. Springer, New York (1991)
del Castillo-Negrete, D., Greene, J.M., Morrison, P.J.: Area preserving nontwist maps: periodic orbits and transition to chaos. Phys. D 91(1–2), 1–23 (1996)
del Castillo-Negrete, D., Greene, J.M., Morrison, P.J.: Renormalization and transition to chaos in area preserving nontwist maps. Phys. D 100(3–4), 311–329 (1997)
Delshams, A., de la Llave, R., Seara, T.M. (2006) A geometric mechanism for diffusion in Hamiltonian systems overcoming the large gap problem: heuristics and rigorous verification on a model. Mem. Am. Math. Soc. 179(844), viii+141
Dettmann, C.P., Morris, G.P.: Proof of Lyapunov exponent pairing for systems at constant kinetic energy. Phys. Rev. E 53(6), R5545–R5548 (2006)
Dettmann, C.P., Morriss, G.P.: Hamiltonian formulation of the Gaussian isokinetic thermostat. Phys. Rev. E 54, 2495–2500 (1996)
Eaton, J.W., Bateman, D., Hauberg, S., Wehbring, R.: GNU Octave Version 5.2.0 Manual: a High-Level Interactive Language for Numerical Computations (2020)
Eliasson, L.H., Fayad, B., Krikorian, R.: Around the stability of KAM tori. Duke Math. J. 164(9), 1733–1775, 06 (2015)
Falcolini, C., de la Llave, R.: A rigorous partial justification of Greene’s criterion. J. Statist. Phys. 67(3–4), 609–643 (1992)
Feudel, U., Grebogi, C., Hunt, B.R., Yorke, J.A.: Map with more than \(100\) coexisting low-period periodic attractors. Phys. Rev. E (3) 54(1), 71–81 (1996)
Figueras, J.-Ll., Haro, A., Luque, A.: Rigorous computer-assisted application of KAM theory: a modern approach. Found. Comput. Math. 17(5), 1123–1193 (2017)
Gidea, M., de la Llave, R., M-Seara, T.: A general mechanism of diffusion in Hamiltonian systems: qualitative results. Commun. Pure Appl. Math. 73(1), 150–209 (2020)
Giorgilli, A., Locatelli, U., Sansottera, M.: An extension of Lagrange’s theory for secular motions. Rend. Cl. Sci. Mat. Nat. 143, 223–239 (2009)
Greene, J.M.: A method for determining a stochastic transition. J. Math. Phys. 20, 1183–1201 (1979)
Guckenheimer, J., Holmes, P.: Nonlinear oscillations, dynamical systems, and bifurcations of vector fields. Applied Mathematical Sciences, vol. 42. Springer, New York (1990). Revised and corrected reprint of the 1983 original
Haro, A.: Automatic differentiation tools in computational dynamical systems. Work in Progress (2011)
Haro, À., Canadell, M., Figueras, J.-L., Luque, A., Mondelo, J.-M.: The parameterization method for invariant manifolds. Applied Mathematical Sciences, vol. 195. Springer, [Cham] (2016). From rigorous results to effective computations
Haro, A., Luque, A.: A-posteriori KAM theory with optimal estimates for partially integrable systems. J. Diff. Equ. 266(2–3), 1605–1674 (2019)
Haro, A., Luque, A.: A-posteriori KAM theory with optimal estimates for partially integrable systems. J. Diff. Equ. 266(2), 1605–1674 (2019)
Herman, M., Sergeraert, F.: Sur un théorème d’Arnold et Kolmogorov. C. R. Acad. Sci. Paris Sér. A-B 273, A409–A411 (1971)
Herman, M.-R.: Sur la conjugaison différentiable des difféomorphismes du cercle à des rotations. Inst. Hautes Études Sci. Publ. Math. 49, 5–233 (1979)
Jungreis, I.: A method for proving that monotone twist maps have no invariant circles. Ergod. Theory Dyn. Syst. 11(1), 79–84 (1991)
Katznelson, Y., Ornstein, D.: The absolute continuity of the conjugation of certain diffeomorphisms of the circle. Ergod. Theory Dyn. Syst. 9(4), 681–690 (1989)
Katznelson, Y., Ornstein, D.: The differentiability of the conjugation of certain diffeomorphisms of the circle. Ergod. Theory Dyn. Syst. 9(4), 643–680 (1989)
Ketoja, J.A., Satija, I.I.: Harper Equation, the Dissipative Standard Map and Strange Nonchaotic Attractors: Relationship Between an Eigenvalue Problem and Iterated Maps, vol. 109, pp. 70–80 (1997). Physics and Dynamics Between Chaos, Order, and Noise (Berlin, 1996)
Khanin, K.M., Sinai, Y.G.: A new proof of M. Herman’s theorem. Commun. Math. Phys. 112(1), 89–101 (1987)
Kim, S.-Y., Lee, D.-S.: Transition to chaos in a dissipative standardlike map. Phys. Rev. A (3) 45(8), 5480–5487 (1992)
Koch, H.: A renormalization group for Hamiltonians, with applications to KAM tori. Ergod. Theory Dyn. Syst. 19, 1–47 (1999)
Koch, H., Schenkel, A., Wittwer, P.: Computer-assisted proofs in analysis and programming in logic: a case study. SIAM Rev. 38(4), 565–604 (1996)
Koch, H.: A renormalization group fixed point associated with the breakup of golden invariant tori. Disc. Contin. Dyn. Syst. 11(4), 881–909 (2004)
Koch, H.: Existence of critical invariant tori. Ergod. Theory Dyn. Syst. 28(6), 1879–1894 (2008)
Koch, H.: On hyperbolicity in the renormalization of near-critical area-preserving maps. Discrete Contin. Dyn. Syst. 36(12), 7029–7056 (2016)
Kolmogorov, A.N.: On conservation of conditionally periodic motions for a small change in Hamilton’s function. Dokl. Akad. Nauk SSSR (N.S.) 98, 527–530 (1954). English translation in Stochastic Behavior in Classical and Quantum Hamiltonian Systems (Volta Memorial Conf., Como, 1977). Lecture Notes in Physics, vol. 93, pp. 51–56. Springer, Berlin (1979)
Kyner, W.T.: Rigorous and formal stability of orbits about an oblate planet. Mem. Am. Math. Soc. No. 81. Am. Math. Soc. Providence, R.I. (1968)
Lanford, O.E.: III. Computer-assisted proofs in analysis. In: Proceedings of the International Congress of Mathematicians, vol. 1, 2 (Berkeley, Calif., 1986), pp. 1385–1394, Providence, RI (1987). Amer. Math. Soc
Laskar, J., Froeschlé, C., Celletti, A.: The measure of chaos by the numerical analysis of the fundamental frequencies. Application to the standard mapping. Physica D 56, 253–269 (1992)
Levi, M.: Qualitative analysis of the periodically forced relaxation oscillations. Mem. Am. Math. Soc. 32(244), vi+147 (1981)
Lichtenberg, A.J., Lieberman, M.A.: Regular and chaotic dynamics. Applied Mathematical Sciences, 2nd edn., vol. 38. Springer, New York (1992)
Lin, K.K., Young, L.-S.: Shear-induced chaos. Nonlinearity 21(5), 899–922 (2008)
MacKay, R.S.: Greene’s residue criterion. Nonlinearity 5(1), 161–187 (1992)
Massetti, J.E.: A normal form à la Moser for diffeomorphisms and a generalization of Rüssmann’s translated curve theorem to higher dimensions. Anal. PDE 11(1), 149–170 (2018)
Massetti, J.E.: Normal forms for perturbations of systems possessing a Diophantine invariant torus. Ergod. Theory Dyn. Syst. 39(8), 2176–2222 (2019)
McKay, R.S.: Renormalisation in Area Preserving Maps. Ph.D. thesis, Princeton University (1982)
Meyer, K.R.: Lie transform tutorial. II. In: Computer Aided Proofs in Analysis (Cincinnati. OH, 1989), pp. 190–210. Springer, New York (1991)
Moser, J.: On invariant curves of area-preserving mappings of an annulus. Nachr. Akad. Wiss. Göttingen Math.-Phys. Kl. II 1962, 1–20 (1962)
Moser, J.: A rapidly convergent iteration method and non-linear differential equations. II. Ann. Scuola Norm. Sup. Pisa 3(20), 499–535 (1966)
Moser, J.: Convergent series expansions for quasi-periodic motions. Math. Ann. 169, 136–176 (1967)
Peale, S.J.: The free precession and libration of Mercury. Icarus 178(1), 4–18 (2005)
Poincaré, H.: New Methods of Celestial Mechanics, vol. 1–3. American Institute of Physics, New York (1993)
Pöschel, J.: Integrability of Hamiltonian systems on Cantor sets. Commun. Pure Appl. Math. 35(5), 653–696 (1982)
Pöschel, J.: A lecture on the classical KAM theorem. In: Smooth Ergodic Theory and its Applications (Seattle, WA, 1999). Proceedings of Symposia in Pure Mathematics, vol. 69, pp. 707–732 (2001). . Am. Math. Soc., Providence, RI
Rana, D.: Proof of Accurate Upper and Lower Bounds to Stability Domains in Small Denominator Problems. Ph.D. thesis, Princeton University (1987)
Rand, D.A.: Existence, nonexistence and universal breakdown of dissipative golden invariant tori. I. Golden critical circle maps. Nonlinearity 5(3), 639–662 (1992)
Rand, D.A.: Existence, nonexistence and universal breakdown of dissipative golden invariant tori. II. Convergence of renormalization for mappings of the annulus. Nonlinearity 5(3), 663–680 (1992)
Rand, D.A.: Existence, nonexistence and universal breakdown of dissipative golden invariant tori. III. Invariant circles for mappings of the annulus. Nonlinearity 5(3), 681–706 (1992)
Rüssmann, H.: Kleine Nenner. I. Über invariante Kurven differenzierbarer Abbildungen eines Kreisringes. Nachr. Akad. Wiss. Göttingen Math.-Phys. Kl. II 1970, 67–105 (1970)
Rüssmann, H.: On optimal estimates for the solutions of linear difference equations on the circle. Celest. Mech. 14(1), 33–37 (1976)
Sansottera, M., Locatelli, U., Giorgilli, A.: On the stability of the secular evolution of the planar Sun-Jupiter-Saturn-Uranus system. Math. Comput. Simul. 88, 1–14 (2013)
Schmidt, G., Wang, B.W.: Dissipative standard map. Phys. Rev. A 32(5), 2994–2999 (1985)
Stefanelli, L., Locatelli, U.: Kolmogorov’s normal form for equations of motion with dissipative effects. Disc. Contin. Dyn. Syst. 17(7), 2561–2593 (2012)
Stefanelli, L., Locatelli, U.: Quasi-periodic motions in a special class of dynamical equations with dissipative effects: A pair of detection methods. Disc. Contin. Dyn. Syst. Ser. B 20(4), 1155–1187 (2015)
Stirnemann, A.: Renormalization for golden circles. Commun. Math. Phys. 152(2), 369–431 (1993)
Stirnemann, A.: Towards an existence proof of MacKay’s fixed point. Commun. Math. Phys. 188(3), 723–735 (1997)
Vaisman, I.: Locally conformal symplectic manifolds. Int. J. Math. Math. Sci. 8(3), 521–536 (1985)
Vlasova, O.F., Zaslavsky, G.M.: Nonergodic regions in the standard dissipative mapping. Phys. Lett. A 105(1–2), 1–5 (1984)
Wang, Q., Young, L.-S.: Toward a theory of rank one attractors. Ann. Math. (2) 167(2), 349–480 (2008)
Wayne, C.E.: An introduction to KAM theory. In: Dynamical Systems and Probabilistic Methods in Partial Differential Equations (Berkeley, CA, 1994), pp. 3–29. Am. Math. Soc, Providence, RI (1996)
Wenzel, W., Biham, O., Jayaprakash, C.: Periodic orbits in the dissipative standard map. Phys. Rev. A 43(12), 6550–6557 (1991). cited By 34
Wisdom, J., Peale, S.J., Mignard, F.: The chaotic rotation of Hyperion. Icarus 58(2), 137–152 (1984)
Wojtkowski, M.P., Liverani, C.: Conformally symplectic dynamics and symmetry of the Lyapunov spectrum. Commun. Math. Phys. 194(1), 47–60 (1998)
Yamaguchi, Y.: Breakup of an invariant curve in a dissipative standard mapping. Phys. Lett. A 116(7), 307–310 (1986). cited By 1
Acknowledgements
R.C. was partially supported by DGAPA-UNAM PASPA A.C. acknowledges the MIUR Excellence Department Project awarded to the Department of Mathematics, University of Rome Tor Vergata, CUP E83C18000100006, EU-ITN Stardust-R, MIUR-PRIN 20178CJA2B “New Frontiers of Celestial Mechanics: theory and Applications”. R.L was partially supported by NSF grant DMS 1800241.
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2022 The Author(s), under exclusive license to Springer Nature Switzerland AG
About this paper

Cite this paper
Calleja, R., Celletti, A., de la Llave, R. (2022). KAM Theory for Some Dissipative Systems. In: Baù, G., Di Ruzza, S., Páez, R.I., Penati, T., Sansottera, M. (eds) New Frontiers of Celestial Mechanics: Theory and Applications. I-CELMECH 2020. Springer Proceedings in Mathematics & Statistics, vol 399. Springer, Cham. https://doi.org/10.1007/978-3-031-13115-8_3
Download citation
DOI: https://doi.org/10.1007/978-3-031-13115-8_3
Published:
Publisher Name: Springer, Cham
Print ISBN: 978-3-031-13114-1
Online ISBN: 978-3-031-13115-8
eBook Packages: Mathematics and StatisticsMathematics and Statistics (R0)