
Abstract
This chapter provides a historical overview of gravimetric surveys in the Arctic. Findings from modern airborne gravimetric surveys in the Arctic carried out by Russian and international companies are analyzed. Marine and airborne gravimetric surveys using the Chekan gravimeters in hard-to-reach areas of the Earth, such as the Geographic North Pole, the Greenland shelf, coastal seas of the Antarctic, and the Himalayas are addressed. Polar versions of the GT-2A gravimeter with the necessary modifications of equipment and software for all-latitude applications are covered. Application of multi-antenna GNSS receivers in these areas is analyzed, and the method of transition to quasi-geodetic coordinates is described.
Access provided by Autonomous University of Puebla. Download chapter PDF
Similar content being viewed by others


Keywords
- Arctic gravimetric surveys
- Gravimetric surveys in hard-to-reach areas
- Gravimeter Chekan
- Gravimeter GT-2A
This Chapter is devoted to the study of the gravity field in remote areas of the Earth. It includes three sections.
Section 4.1 provides a historical overview of gravimetric surveys in the Arctic. Measurements conducted on drifting ice, onboard submarines and icebreakers are described. The results of modern airborne gravimetric surveys in the Arctic carried out by Russian and international companies are analyzed.
Section 4.2 presents the results of marine and airborne gravimetric surveys using the Chekan-series gravimeters in hard-to-reach areas of the Earth, such as the Geographic North Pole, the Greenland shelf, coastal seas of the Antarctic, and the Himalayas. The methodological features of surveys using Chekan gravimeters, estimation of the accuracy and resolution of measurements are discussed.
Section 4.3 is devoted to the versions of the GT-2A gravimeter designed to conduct airborne gravimetric measurements in polar regions of the Earth. The experience in using multi-antenna GNSS receivers in these areas is analyzed, and the method of transition to quasi-geodetic coordinates used in the solution of this problem is described. The test results for the GT-2AQ gravimeter with a four-antenna GNSS receiver installed on a pickup truck are presented.
4.1 State of Knowledge of the Gravity Field in the Arctic
The data on the Earth’s gravity anomalies in the Arctic were very fragmented and obtained using various methods by different authors and in various years (using diverse instruments with different errors). Moreover, the coordinate provision of these studies in the Arctic imposed its specifics and introduced errors. For these reasons, the errors of the GA models are present most of all in the polar cap of the Arctic. Due to the ice cover and remoteness from the bases, the detailed gravimetric area surveys in high latitudes can only be conducted onboard an aircraft.
4.1.1 Brief Historical Overview of Russian Gravimetric Surveys in the Arctic
To discuss the current state of knowledge of the Arctic gravity field and the potential for further research, a few words should be said about the historical sequence of gravimetric surveys in the Arctic and the significance of their results.
Measurements on drifting ice. In the mid-1950s, the USSR Ministry of Defense approached the Main Department of Geodesy and Cartography (GUGK) and the Academy of Sciences with a proposal to perform the gravimetric area survey of the Soviet sector of the Arctic Ocean. Extremely short performance time—only two years—was imposed. Because of the Arctic meteorological conditions, the survey could be conducted only in spring (from March to May), when the polar night had already ended, but the ice was still strong enough to land heavy aircraft. This kind of work had never been carried out in the global practice of gravimetric surveys. GUGK refused to perform the studies for some reason, and it was decided to employ the Geophysical Institute of the USSR Academy of Sciences and the Military Topographic Service of the Soviet Army.
In a short time the methodology was developed, the required gravimetric instrumentation and auxiliary equipment for gravity measurements on drifting ice were prepared. By the Order of the Council of Ministers of the USSR No. 645 dated February 3, 1955, and the Resolution of the Council of Ministers of the USSR No. 383–232 dated March 3, 1955, it was “proposed to arrange a High-latitude airborne expedition of 1955 to conduct gravimetric and magnetic observations on drifting ice in the area north of Spitsbergen, Franz Josef Land, and Severnaya Zemlya, including the strip above the underwater Lomonosov Ridge and the area of the North Pole.” This expedition was named the High-Latitude Airborne Expedition Sever-7.
The geophysical party had to conduct the area gravimetric survey with a density of 1 observation point per 10,000 km2. The plan included the gravity determination at 105 points more or less uniformly distributed in the western part of the Central Arctic, including the North Pole. Gravimetric measurements were taken with the SN-3 pendulum gravimeters, and the geodetic referencing of gravity stations was performed with the OT-02 theodolite.
The expedition Sever-7 worked from March 20 to June 10, 1955, and, despite the harsh conditions of the Arctic, the geophysical party successfully completed the planned works. A total of 117 gravimetric stations were determined in the western sector of the Polar Basin. The accuracy of gravity survey was about 1.2 mGal. The station coordinates were obtained with RMS errors (RMSE) of 0.1 arcmin by planets and stars and 0.6 arcmin by the Sun.
By the Order of the Council of Ministers of the USSR No. 6410 dated September 1, 1955, the surveys were continued in the eastern sector of the Soviet Arctic. One hundred and sixty-four main gravity stations and a number of additional gravity stations were determined within 45 days, from April 4 to May 18, 1956, during the next Sever-8 expedition. The error of gravity survey was of the same order as in 1955. That is how the first gravimetric 1:1,000,000 map of the Soviet sector of the Arctic Ocean was obtained.
Underwater surveys of the Arctic. Regular underwater surveys in the World Ocean started in 1955 following the Resolution of the USSR Council of Ministers on the studies of the gravity field, the figure and structure of the Earth, for which purpose the Navy regularly provided combatant submarines. In the same year, the Sternberg Astronomical Institute (SAI MSU) organized an expedition to measure gravity in the Barents, Kara, and Pechora Seas (Stroyev et al. 2007). Thirty-eight stations were determined accurate to ±6–8 mGal. The next year, the survey profile ran in the Bering Sea with going out to the Chukchi Sea. The survey was conducted with the same gravimeters SZ-1 and SZ-2, and the GAK land gravimeter to reference the berthing measurements to the stations of the USSR reference gravimetric network. To estimate the effect of rolling, the measurements were taken at 30–120 m depths, during the submarine motion and grounding. Despite the stormy weather, the Faye anomalies were calculated accurate to ±4 and ±6.2 mGal for pendulum instruments and gravimeters, respectively. The study of the dependence of the Brown correction for the effect of disturbing acceleration on depth showed that the depth of 60 m is sufficient for observations in stormy weather, whereas it can be half as large in good weather (Stroyev et al. 2007).
In 1957, the expedition jointly organized by the SAI MSU, the Central Research Institute of Geodesy, Airborne Survey and Cartography (TsNIIGAiK) with the participation of VNIIGeofizika conducted research in the Barents, Norwegian, Greenland Seas, and in the Atlantic Ocean. The route passed from Murmansk to the equator bypassing Iceland, making a 2.5-month independent transit. Pendulum instruments and auxiliary long-period pendulums developed by TsNIIGAiK were used during the expedition. Most of measurements were carried out at a depth of 100 m; specific features of measurements at depths from 30 to 120 m were investigated. To more accurately determine the submarine geographic coordinates, the behaviour of the main currents was studied, which helped to analyze their influence on the determination of the Eotvos correction (Stroyev et al. 2007). During the survey, the submarine passed all the climatic zones, took measurements at 119 stations with a gravity error of ±4–5 mGal and estimated 24 stations obtained by Vening Meinesz, Girdler, and TsNIIGAiK.
Underwater marine surveys were conducted by both Russian and international scientists in almost all latitudes of the World Ocean. International companies have gained positive experience in underwater research, the results of which are partially open for the scientific community. Among these initiatives, the SCICEX project (Science Ice Expedition) (Pyle et al. 1997) is worth mentioning.
Gravimetric measurements using icebreakers. Considering the potential of marine shipborne gravimetry, effective survey methods were developed to be applied onboard above-water carriers, such as icebreakers. As noted in (Litinsky 1972), gravimetric surveys onboard icebreakers can be quite widely applied, since a great number of mid-latitude seas freeze in winter along with polar water areas. Surveys onboard icebreakers can provide measurements with almost any resolution and can be supported by high-precision positioning using radio navigation and satellite systems. The first gravity measurements in the Arctic using the pendulums were carried out as early as in 1893–1896 by Nansen’s expedition during the Fram’s drift from the New Siberian Islands to the Svalbard Archipelago. The obtained measurements suffered from rather high systematic errors due to the structural imperfection of the measuring instruments. In 1937–1940 the Russian marine surveys were conducted onboard the icebreakers Georgy Sedov and Sadko drifting in the high Arctic latitudes, using three-pendulum instruments designed by Vening Meinesz (Zhonglovich 1950). The measurements were performed with errors comparable to those of submarine gravimetric observations.
With the development of marine survey practice, the first measurements onboard ice class ships were conducted by the First Soviet Antarctic Expedition (1955) and the High-Latitude Greenland Expedition (1956) onboard the diesel-electric vessel Ob (Gaynanov 1961; Chesnokova and Grushinsky 1961). The measurements were taken with pendulum instruments (Cambridge and Askania Werke) and provided satisfactory results. It was shown that due to the strong vibration of the engines, observations onboard such vessels should be carried out in drift with the diesel generators off and under favorable weather conditions, or when the vessel enters the ice to avoid the influence of high swell in open waters.
The first high-precision marine gravimetric survey in the North Pole area was conducted in the central part of the Arctic Ocean using two similar gravimetric systems, Chekan-AM and Shelf-E developed by Concern CSRI Elektropribor (Blazhnov et al. 2002; Krasnov et al. 2014b). It was integrated with seismic and bathymetric surveys using a single grid of survey lines (Kazanin et al. 2016). As a result, 36 gravimetric lines were obtained and the catalog of 71,179 gravimetric stations was created. The estimated RMSE at the intersection points of survey lines was 0.28 mGal for Shelf-E and 0.72 mGal for Chekan-AM (Sokolov et al. 2016b). The results of this survey are discussed in detail in Sect. 4.2.
In gravimetric surveys, icebreakers can be applied as convoying and basing ships for complex expeditions and groups conducting airborne surveys onboard helicopters. Direct gravimetric observations are recommended onboard drifting icebreakers, mainly for organization of floating gravity reference stations to support airborne surveys.
4.1.2 Modern Russian Arctic Airborne Gravimetry
Several solutions have been recently implemented in Russia in the sphere of airborne gravimetry in the Arctic.
The GT-2A gravimeter has been upgraded based on the airborne survey experience in the Arctic (see Sect. 4.3 for details). The gravimeter software has been improved by the Laboratory of Control and Navigation of the Department of Mechanics and Mathematics of the Lomonosov Moscow State University. The Institute of Physics of the Earth RAS has proposed a number of improvements to the measuring system (see (Koneshov et al. 2016), and Sect. 1.3) and experimentally studied the gravimeter operability in latitudes up to 78°N using modern high-precision positioning technologies. In addition, Aerogeophysica has refined the surveying techniques, which allowed area survey with a scale of no worse than 1:1,000,000 in the North of the Kara Sea up to 81°N (Mogilevsky et al. 2015).
Chekan series gravimeters developed by Concern CSRI Elektropribor (see Sect. 1.2) and widely used in marine gravimetry are also applied to modern airborne area measurements, though less often than GT-2A gravimeters.
To support the Russian Federation claims to extend the Russian continental shelf in the Arctic, VNIIOkeangeologia conducted airborne magnetic and gravity surveys above the Lomonosov Ridge and Mendeleev Rise in 2005 and 2007 (Ekspeditsionnye issledovaniya 2006).
Airborne gravimetric studies of 2005 were carried out with the airborne gravimetric system including three string gravimeters GAMS, GSD-M and a string barometer (developed by VNIIGeophyzika, Russia). Airborne surveys above the Mendeleev Rise were carried out over an area of 240 × 640 km between 75° and 78°N using a system of submeridional lines with 10 km spacing and orthogonal crosslines with an interval of 20–30 km. A number of additional submeridional survey lines that shortened the distance between the survey lines to 5 km were passed to ensure a more detailed study of the central part of the area.
The airborne gravimetric survey by VNIIOkeangeologiya in 2007 was conducted using a more modern gravimeter Chekan-AM. The 100 × 720 km survey area was located along the Arctic-2007 geotraverse in the junction zone of the Lomonosov Ridge with the adjacent shelf between ~78° and 84°N (Palamarchuk et al. 2008; Russian Arctic Geotraverses 2011). The Chekan-AM gravimeter demonstrated stable performance in high latitudes, and a 1:1,000,000 map of EGF anomalies was constructed (Fig. 4.1). The details of conducting this survey are discussed in Sect. 4.2.

EGF anomaly map based on Chekan-AM data
In 2006–2013, IPE RAS Graviinertial Measurements Laboratory successfully completed aerogravimetric surveys above the southern, central and north-western parts of the Novaya Zemlya Archipelago and the adjacent water areas of the Barents and Kara Seas. The measurements were conducted using GT-1A/2A airborne gravimetric systems installed onboard an airborne laboratory based on Antonov AN-26 BRL (Drobyshev et al. 2008, 2009, 2011). The total area of 180,000 km2 was surveyed at a scale of 1:200,000, and relevant maps were constructed.
In 2011–2013, the IPE RAS conducted an area survey with a scale of 1:200,000 over 60,000 km2 in the central part of the Kara Sea.
The most recent Russian airborne gravimetric surveys in the Arctic have been conducted by Aerogeophysica. The objective of the surveys was to solve prospecting problems and compile individual sheets of the new edition of the state geological map.
In 2011–2013, Aerogeophysica prepared nine survey maps at the scale 1:1,000,000 for the eastern coast of the Russian sector of the Arctic within 132°E to 174°W, 68°N to 72°N: R-53…R-01. Surveys with GT-2A gravimeters were integrated with airborne magnetic studies onboard AN-26 and AN-30 aircraft. By comparing the aerogravimetric measurements with the results of 1:200,000 land surveys conducted in 1970–1990s, and based on internal convergence, the accuracy of the aerogravimetric survey was estimated at 0.6–0.7 mGal (Mogilevsky and Kontarovich 2015). Aerogeophysica has also completed high-latitude surveys in the northern part of the Kara Sea (up to 81°N), in the western part of the Laptev Sea, north of the New Siberian Islands and in the south-east of the East Siberian Sea within a number of licence areas with promising hydrocarbon fields.
Airborne gravimetric survey in the Arctic is a very difficult task. This is not only due to the specific operation of gravimetric systems in this region and the refinement of the surveying methodological techniques, but also due to the lacking base airfields in a number of Arctic regions. For this reason, 1:200,000 maps have not yet been obtained for the junction areas of the Lomonosov and Mendeleev ridges and the shelf zone of Russia.
4.1.3 Modern International Arctic Airborne Gravimetry
About 30 years ago, airborne gravimetry began to be commonly used in international gravity field studies. During this time, the western researchers have carried out a significant amount of airborne gravimetric surveys in the Arctic.
For example, the Naval Research Laboratory, Washington, DC, USA, has surveyed more than 210,000 linear km covering almost 2/3 of the Arctic Ocean within the Arctic Airborne Gravity Measurement Program (Fig. 4.2) (Brozena and Salman 1996). The results of these studies, along with other gravity data available at the time, were applied to develop EGF integrated models using satellite measurements of projects ERS 1 and 2 that ensured data coverage up to 81.5°N.

Airborne gravimetric measurements by the Naval Research Laboratory
To determine the resolution of aerogravimetric studies and the accuracy of the ERS 1998 integrated global model of the Earth’s gravity field, a comparative analysis was performed for two groups of long lines, and the correlation was determined between them, airborne gravity surveys of 1996, and the Canadian ice surveys along these lines. Airborne gravimetric studies were conducted with LaCoste & Romberg gravimeters (USA). The first group of three lines of about 600 km oriented NNW between 71° and 75°N in the area of the Beaufort Sea demonstrated a good qualitative agreement between the measurements obtained by all three methods. Despite the fact that the standard deviation (SD) between ice observations and airborne survey data is about one-third lower than with the ERS 1998 model (1.86 and 2.64 mGal, respectively), the SD between the model data and airborne survey data was 2.55 mGal. This indicates that when creating the global EGF model based on satellite data, the detailed ice and marine survey data could greatly contribute to the refinement of the final model values in the survey area. This assumption is also confirmed by the short-period anomalies in the values of the ERS model with the resolution of the gravimetric data estimated at 15 km. In this regard, airborne and marine and ice survey data (with a grid density of one station per 3–10 km2) can be considered as independent measurements, and deviations of the ERS 1998 model can be considered as regional features. For details on estimating the accuracy of global EGF models in the Arctic, see Sect. 6.1 of this monograph.
In 1999–2001, Rene Forsberg and his colleagues carried out airborne surveys offshore Greenland with the RMSE reaching ~2 mGal for the spatial resolution of about 6 km (Forsberg et al. 2011). This exceeded the accuracy of earlier measurements greatly (RMSE ~5 mGal with a spatial resolution of ~20 km). In 1999–2001, measurements were also carried out near the Svalbard Archipelago. The new airborne gravimetric data well correlated with the results of marine surveys of the 1990s. The studies were applied to check and refine the earlier surveys conducted on various carriers during the ArcGP-2002 (Arctic Gravity Project) creating a detailed global free air EGF 5 × 5′ model (Fig. 4.3) (Forsberg and Keyon 2004).

Arctic gravitational field based on ArcGP project data
Due to the unique opportunity to use airborne gravimetric data of the large-scale Arctic Airborne Gravity Measurement Program, as well as other available gravimetric data, the ArcGP-2002 project covered the area above 81.5°N not covered by the ERS mission data. The model first version was supplemented with the icebreaker gravimetric survey data, detailed gravimetric data for the Russian sector of the Arctic shelf, land measurements for Siberia (VNIIOkeangeologia, PMGRE, TsNIIGAiK), ICESat satellite mission data extending the satellite coverage to 86°N, and CryoSat data to create the improved EGF model ArcGP Ver. 2.0.
The second revision of the Arctic gravity field model mentioned above became the basis for the global EGF model EGM2008. This global model created using GOCE data showed a significantly increasing correlation of the digital geoid models for the Arctic and Antarctic polar caps above 83°N (Forsberg et al. 2011). To solve this problem in the South Pole area, R. Forsberg’s group proposed to conduct an airborne gravimetric survey which, along with satellite data, would improve the quality of the global field model EGM2008 for high latitudes.
Due to the relevance of redefining the outer border of the continental shelf in the Arctic and studying the structure of the Earth’s crust near the Lomonosov Ridge, the western researchers carried out airborne gravity and magnetic surveys over an area of over 550 thousand square km within the Lomgrav-09 project. The 2009 survey also covered the North Pole area claimed by Russia, Canada, the USA, Norway, and Denmark.
Airborne gravimetric measurements were carried out with the improved LaCoste & Romberg S99 and SL1 airborne gravimeters using a system of lines located subparallel to the Lomonosov Ridge on the Norwegian side of the Arctic Ocean with a 12–15 km spacing and three crosslines. The survey grid was chosen so that to cover a rather large area in the vicinity of the Lomonosov Ridge, as well as due to the location of airports provided with sufficient amounts of fuel. The same factors probably explain the small number of crosslines (3 survey lines across the Alpha and the Lomonosov ridges). The survey RMSE of 2.4 mGal was obtained in the office processing of the airborne gravimetric data. The data from this airborne survey were compiled with the earlier measurements carried out on land, ice, and moving vehicles to create a new free-air GA map with a resolution of 2.5 km and 18 km correlation length. The use of earlier data in the final model of free-air gravity anomalies sometimes led to discrepancies in the anomaly amplitudes of more than 15 mGal compared with the LOMGRAV-09 measurements. The authors also note that the maximum discrepancies reached about 80 mGal and related to the airborne gravity surveys of 1998–1999 and to the Danish-Canadian ice surveys. This resulted in the need to remove these data from further analysis.
Based on the results obtained in the Greenland sector of the high-latitude Arctic (between 80° and 89°N), dense systems of linear positive anomalies were detected running along the central part of the Lomonosov Ridge, some of which were up to 300 km long. Some linear anomalies not represented in the modern seabed terrain were interpreted by the authors—based on the obtained seismic data—as presumably rift structures buried under Cenozoic sediments. New gravimagnetic data, according to the authors, do not confirm the existence of a significant strike-slip or transform fault between the Lomonosov Ridge and the polar margin of the Lincoln Sea. The above-discussed EGF studies were used along with available seismic and other geological and geophysical data to determine the origin and tectonic structure of the Amundsen Basin and to redefine the position of the continental margin near Greenland.
4.1.4 Conclusions
Analysis of gravimetric surveys in hard-to-reach Arctic areas has shown that the conducted research is not extensive enough to adequately estimate the errors in the modern models of the gravitational field of the planet polar cap, and more detailed surveys are recommended in these areas. For this specific remote area of the Earth, airborne gravimetric surveys should be considered as the main method of gravimetric studies. Studying the field of the region will help solve one of the most important fundamental problems: refining the Earth’s figure in the Arctic.
4.2 The Results of the Gravimetric Surveys with Chekan Gravimeters in Hard-to-Reach Areas
To date, polar areas, mountain ranges, as well as transit zones at the boundary of sea and land remain the least studied areas of the Earth in terms of GAs. The development of gravimetric systems and satellite technologies stimulated active industrial and scientific gravimetric surveys in such hard-to-reach areas at the beginning of the twenty-first century. Yet, the main method of measurement is, as before, determination of gravity increments on survey lines carried out with relative gravimeters installed onboard marine and airborne carriers, since other gravimetric methods do not provide the required spatial resolution.
The main surveys using the Chekan-AM gravimeter are traditionally conducted as a secondary geophysical method used in explorations for hydrocarbons on the sea shelf (Krasnov et al. 2014a). However, gravimeters of the Chekan series have recently been used to study the EGF in hard-to-reach areas. Section 4.2 discusses the results of such works and the methodological features of their implementation.
4.2.1 Marine Gravimetric Surveys in the Polar Regions
As part of the Russian Antarctic Surveys, the Polar Marine Geosurvey Expedition annually conducts gravimetric surveys of the marginal seas of the Antarctic onboard the Akademik A. Karpinsky research vessel. In the period from 2005 to 2015, the surveys were conducted using two systems, Chekan-AM and Cheta-AGG, and since 2016, two Chekan-AM gravimeters have been used.
An overview map of the surveys conducted over these years is shown in Fig. 4.4. The total length of the survey lines is more than 70,000 km. Gravimetric studies are integrated with seismic and magnetic surveys.

Overview map of gravimetric surveys in the marginal seas of the Antarctic (RAE—Russian Antarctic Expedition)
A significant difference in gravity (over 2.5 Gal) relative to the gravity reference station (GRS) in the port of Cape Town and a long duration of work with no port calls are specific features of gravimetric measurements. In this regard, more stringent requirements are imposed on the calibration quality of the gravity sensor and stability of the gravimeter drift.
In the marginal seas of the Antarctic, surveys are usually conducted in severe meteorological and ice conditions. During hurricanes, the wind speed reaches 20 m/s and the sea state reaches 5–6 on the Douglas scale. When moving along most of the geophysical lines, it is necessary to sail around icebergs and ice fields, sometimes deviating from the survey line by 10 km or more, and in some cases, changing the direction of the line.
As a result of the conducted surveys, 1:2,500,000-scale EGF maps were compiled for marginal seas of the Antarctic, such as the Weddell Sea, the Cooperation Sea (also called the Commonwealth Sea), the Riiser-Larsen Sea, the Cosmonauts Sea, and the Davis Sea. The RMS error of the gravimetric surveys was less than 1 mGal for all Antarctic surveys carried out over 11 years.
The first high-precision marine gravimetric survey near the North Pole was conducted in 2014 within the Arctic-2014 survey, which was coordinated by the Marine Arctic Geological Expedition (MAGE) as part of integrated geophysical surveys of the Arctic Basin (Kazanin et al. 2015; Sokolov et al. 2016b). Surface gravimetric survey was a secondary method; it was conducted in conjunction with the seismic and bathymetric surveys at a single grid of lines.
The survey was carried out with two gravimeters, Chekan-AM and Shelf-E, which were installed onboard the Akademik Fedorov research vessel (Fig. 4.5).

Chekan-AM (left) and Shelf-E (right) gravimeters onboard the Akademik Fedorov research vessel
The following areas were defined as spatial boundaries of the survey area: the Arctic Ocean, the Podvodnikov Basin, the Vilkitsky Trough, the Amundsen Basin, the Nansen Basin, the Makarov Basin, the outer shelf of the Laptev Sea and the East Siberian Sea. The total survey area was about 350,000 km2. A map of the survey lines is shown in Fig. 4.6.

Map of survey lines in the Arctic Basin
Initial and final reference gravimetric observations were carried out at the port of Kiel (Germany) on July 14 and October 9, 2014, respectively. Measurements on the survey lines were carried out for two months from July 28 to September 27, 2014, with no port calls.
Taking into account the difficult ice conditions, two vessels were used to carry out the survey: the Yamal icebreaker was making a channel, while the Akademik Fedorov, an ice-reinforced research vessel, followed the icebreaker conducting the survey.
In the polar regions, the solid ice was 4 m thick. In those conditions, the Akademik Fedorov could not keep on moving steadily and continuously. During the measurements, the vessel performed regular stops and changed tacks. Of 10,200 km of the survey, 7500 km were conducted in solid ice and only 2700 km in relatively open water. The average speed of the vessel through the ice was 3.8 kn (with a minimum of 2.1 kn) and 5.1 kn in open water.
Thirty-six gravimetric profiles were derived as a result of the complex research. The compiled catalog of the gravimetric sites comprises 71,179 independent measurements. The main criterion for the measurement accuracy was the RMS error of a single GA determination at repeated control points, which was 0.28 mGal for the Shelf-E gravimeter and 0.72 mGal for the Chekan-AM gravimeter. The results obtained correspond to the current level of high-precision marine surveys.
Figure 4.7 shows values of the depths, Bouguer and free-air anomalies for Line AR1409-07. The plot shows a high degree of correlation of the free-air anomalies with the seabed terrain as well as high-frequency EGF anomalies.

Plots of depth, Bouguer and free-air anomalies on Line AR1409-07
The processing of the results of the whole survey made it possible to detect EGF anomalies with a spatial resolution of less than 1 km and amplitude of 1–5 mGal, which can be measured only from a marine vessel. This is also confirmed by the comparison (Fig. 4.8) of the survey results with the values of the EGF anomalies from the EGM2008 global model and the data from the Arctic Gravimetric Project (ArcGP), which is presented by the results of the 1999 airborne gravimetric survey in this region.

Comparison of the gravimetric survey results with the data of the EGF models for Line AR1409-08
It can be seen that marine measurements have higher spatial resolution and are free from the systematic errors of airborne surveys (ArcGP) as well as an additional displacement of the local maxima of the calculated model (EGM-2008).
The results of the marine gravimetric survey carried out in the area of the North geographical pole have confirmed the undoubted priority of this method in the study of the high-frequency component of EGF anomalies. The unsteady motion of the vessel along the survey lines because of difficult ice conditions has little or no impact on the accuracy of EGF measurements. The Chekan-AM gravimeter software and hardware allow for conducting high-accuracy gravimetric surveys in the Arctic latitudes up to the geographic pole of the Earth.
4.2.2 Regional Airborne Gravimetric Surveys
In 2007–2011, TGS-NOPEC Geophysical Company (Norway) used a Chekan-AM gravimeter to conduct five regional surveys in the northern, north-eastern, and south-western parts of the Greenland shelf (Krasnov et al. 2010). Gravimetric measurements were carried out onboard various types of light turboprop aircraft (Table 4.1). An overview map of the surveys is shown in Fig. 4.9.

Survey areas on the Greenland shelf
One Chekan-AM gravimeter was used for each survey. The field work lasted about three months. Throughout the whole period, the gravimetric equipment needed continuous thermal regulation. During the survey period, the air temperature varied by up to 30 °C. Therefore, of vital importance in the surveys was to maintain a constant temperature in the aircraft cabin, where the gravimeter was installed.
Quality control of temperature stabilization during the survey can be done using the reference observation database. Figure 4.10 shows a database of reference observations of the ULAG09 survey. Each point on the diagram represents the average value of the gravimeter readings for 1 h immediately before the flight. The data presented indicate that the standard deviation of the preflight measurements of the gravimeter for 33 days was about 0.3 mGal, which characterizes good temperature stabilization at the gravimeter location.

Database of reference observations of the ULAG09 survey
The aircraft speed on the survey lines of the Greenland shelf was about 70 m/s. A window filter with a cutoff frequency of 0.01 Hz was used in postprocessing. Thus, the resolution of the measurement results on the survey lines was about 7 km (half the wavelength). The surveys were carried out on a grid of primary and tie lines. The distance between the primary lines was specified in accordance with the required scale of the final gravity anomaly map (Table 4.2).
Figure 4.11 shows the gravity anomaly for one of the tie lines of the ULAG08 project. The points on the diagram indicate the values of the anomalies at the primary lines. The figure also shows the gravity anomaly obtained with the use of satellite altimetry. It can be seen that the airborne gravity survey data have a higher resolution and provide a more detailed structure of the gravity field.

Results of measurements on the tie line in comparison with satellite altimetry data
Office processing of the survey results carried out with special software validated the high quality of the data obtained. The total length of the lines of gravimetric surveys on the Greenland shelf exceeded 300 thousand km. The standard deviation of the error does not exceed 1 mGal at a spatial resolution of about 7 km. All the surveys were conducted in harsh conditions of the Arctic, with two of the surveys conducted in latitudes above 75°N. During the surveys, no gravimetric equipment failure was logged and the total amount of data rejected for various reasons was less than 5%.
A geophysical survey conducted by the Russian company VNIIOkeangeologia in May 2007 is another example of production airborne surveys using the Chekan-AM gravimeter (Palamarchuk et al. 2008). Comprehensive gravimetric and magnetic studies were carried out in the Arctic Ocean in the zone of the Lomonosov Ridge in the area bounded by 75–84°N onboard an IL-18D aircraft. The plane flew at a speed of 100 m/s at an altitude of 500–1500 m along primary lines spaced by 10 km, and a series of tie lines.
The gravity field measured in the survey area turned out to be quite irregular. The average field gradient was ~0.7 mGal/km with maximum values up to 4 mGal/km. Figure 4.12, representing the primary line no. 2, also showing the seabed terrain, gives a clear idea of the field nature (Palamarchuk et al. 2008). It is easy to see a good correlation between the underwater terrain and the gravity anomaly. A comparison was made between the resulting field and the gravity anomaly map compiled in the ArcGP project. The comparison showed much greater detail of the first one as compared with the ArcGP map and a better correlation of the measured field with the seabed terrain.

Comparison of the airborne profile with the ArcGP Project Data and the underwater terrain
Since the main objective was to conduct magnetic measurements, the weather conditions and flight mode were chosen mainly with consideration for the requirements of the magnetic survey; however, they were not always favorable for gravimetric measurements. As a result, the noise (vertical and horizontal accelerations of the aircraft) turned out to be as great as 25 Gal on average for the season, reaching 50–80 Gal at maneuvers.
The RMS error of the survey estimated from the misties was 1.5 mGal, and after elimination of several points measured under high turbulence conditions, it became 0.8 mGal. The airborne survey resulted in a 1:1,000,000-scale map of the free-air gravity anomaly.
Another type of hard-to-reach areas in which it is necessary to perform gravimetric studies is mountain ranges. Due to the rugged terrain and the irregularity of the gravitational field, such measurements are needed to improve the geoid model. In December 2010, the Technical University of Denmark carried out an airborne gravimetric survey to map the geoid in Nepal (Forsberg et al. 2015). The airborne survey in the highest mountains of the Earth, the Himalayas, was carried out using Chekan-AM and L&R gravimeters from a Beech King Air aircraft.
The survey lines in Nepal were laid at a distance of about 6 nautical miles from each other (Fig. 4.13). Because of significantly different topographic conditions, the flights were conducted at altitudes from 4 km on the southern lines to 10 km on the northern lines. Flights along the tie lines were also conducted at an altitude of 10 km.

Flight altitude (m) during the airborne gravimetric survey in Nepal
In the course of airborne gravimetric surveys in Nepal under difficult conditions of an irregular gravitational field and turbulence, the data on the Chekan-AM and L&R gravimeters employed in the surveys along with the new data from the GOCE mission and the topographic data were used to produce an improved national geoid model for Nepal. The accuracy estimate of the improved geoid model was about 10 cm over most of the country, which was confirmed by the GPS leveling data in the Kathmandu Valley.
In addition, in 2015, it was for the first time that the work on integration of marine and airborne gravimetric measurements in the Arctic was done. Sevmorgeo, JSC, conducted their airborne gravimetric survey with the use of Chekan gravimeters. The survey was carried out in the northern part of the East Siberian Sea, from April 6 to August 31, 2015, with the aim to create a modern geological and geophysical basis for the poorly explored area with a high oil and gas potential (Peshekhonov et al. 2016).
Two Chekan-AM gravimeters and a Shelf-E gravimeter were used in the airborne gravimetric survey. The gravimeters were installed in the central part of the AN-30 aircraft fuselage. Flight measurements were carried out relative to the reference station at the airdrome of the town of Pevek.
The gravimetric survey was conducted at altitudes from 340 to 370 m. The distance between primary survey lines was 4 km; the distance between the tie survey lines was 25 km. The average flight speed during measurements varied from 75 to 100 m/s.
A distinctive feature of this survey is that the survey area is crossed by the lines of the marine survey that was previously carried out as part of the Arctic-2014 expedition (see Fig. 4.6). This allowed for a joint analysis of marine and airborne gravimetric data.
A map of airborne and marine survey lines is shown in Fig. 4.14.

Map of airborne and marine gravimetric survey lines
The total length of airborne survey lines is more than 40,000 km. Data processing showed high accuracy in determining gravity acceleration. For example, the survey RMS error estimated for 1400 misties was as follows:
-
for Chekan-AM gravimeters: 0.85 mGal and 0.83 mGal;
-
for the Shelf-E gravimeter: 0.69 mGal.
For the comparative analysis, the marine and airborne gravimetric survey data were recalculated taking into account the absolute values of the gravity acceleration at reference stations. A station of Class 1 state grid was used for the Pevek aerodrome, and for the port of Kiel the absolute value was obtained from the AGrav international database (Wziontek et al. 2009).
The average correction for reduction of the airborne measurements to an ellipsoid was about 110 mGal. The difference with respect to the RGS was on average 0.5 Gal for airborne survey and 1.5 Gal for marine survey. At the same time, marine onboard measurements on the lines crossing the area of the airborne survey were taken 60–70 days after the reference observations in the port of Kiel.
Figure 4.15 shows an example of the gravity anomaly for one of the marine survey profiles, which also shows the values of the anomalies at the points of intersection with the airborne survey profiles.

Gravity anomaly curve on a marine survey profile and anomaly values from the airborne survey data
Based on the analysis of 133 misties at the intersection points of marine and airborne survey lines, the following accuracy estimates were obtained:
-
Systematic difference between surveys: 0.61 mGal;
-
RMSD between marine and airborne surveys: 1.1 mGal.
Thus, the gravimetric lines of high-accuracy marine route survey up to the North Geographical Pole of the Earth can be considered as a reference grid for airborne gravimetric surveys. Such integration of data allows eliminating the methodological error of the recalculation of airborne gravimetric measurements to the ellipsoid surface, while the high performance of airborne gravimetric surveys, sufficient spatial resolution, and modern gravimetric equipment make it possible to successfully solve the problem of prospecting for hydrocarbons in the Arctic.
4.2.3 Carriers Used for Gravimetric Measurements
Airborne gravimetry is a crucial method to improve the knowledge about the Earth gravity field, especially in hard‐to‐reach regions. Its main advantage, compared to traditional marine and land surveys, is a relatively short period of time needed to obtain raw data. However, to date, it still remains a problem to increase the spatial resolution of the results of airborne gravimetric measurements. With this purpose in view, low-speed aircraft, such as light turboprop planes, helicopters, and airships, are considered attractive as carriers of gravimetric equipment.
The first experiment on conducting experimental methodological work using a Chekan-AM gravimeter onboard a light turboprop plane was performed in 2007 in cooperation with the Braunschweig Technical University (Krasnov and Sokolov 2009; Krasnov et al. 2007). The survey was carried out onboard a Dornier-128 aircraft with a flight height of about 300 m and a speed of 50–60 m/s.
The measurement accuracy was estimated by comparing the data with a high-resolution land map (Fig. 4.16).

Comparison of the data of an airborne survey and a land map
The results of experimental methodological work have confirmed the feasibility of conducting airborne gravimetric surveys with an error of less than 1 mGal with a spatial resolution of 5–6 km. However, paths with satisfactory flight conditions turned out to be quite short. Nevertheless, those tests made it possible to work out a technique for conducting airborne surveys using the Chekan-AM gravimeter.
In January 2014, the first works were carried out using a Chekan-AM gravimeter onboard an AU-30 airship (Krasnov et al. 2015). The purpose of that experiment was to determine the possibility of using an airship as a carrier of gravimetric equipment, to assess the level of induced perturbing accelerations, and to develop recommendations for creating an airship-based geophysical laboratory.
The Chekan-AM gravimeter was installed in the cabin of Augur Aeronautical Center’s AU-30 airship (Fig. 4.17). The tests were conducted in the Vladimir Region.

Chekan-AM gravimeter onboard the AU-30 airship
A test line with a length of about 50 km was passed three times. The flights were conducted at an altitude of 330 m with an average speed of 17 m/s, corresponding to the cruising speed of the AU-30 airship. The airship was held at a specified altitude in the range of ±40 m, which is several times worse than the satisfactory conditions for airborne surveys (Sokolov et al. 2016a). Deviations from the specified trajectory reached significant values of 100–150 m, which is due to the fact that the airship speed was comparable to the wind speed, and it was impossible to ensure high-quality support for the carrier stable motion at the specified altitude and trajectory in such conditions. As a result, the value of inertial accelerations due to the unsteady motion of the carrier when running survey lines was 2–3 times higher as compared with similar measurements taken onboard light turboprop aircraft.
Despite the fact that the use of an airship as a carrier increased the spatial resolution of the gravimetric measurements 3–4 times, the accuracy obtained is approximately 2–3 times worse than the accuracy of measurements taken onboard aircraft that are less susceptible to the influence of dynamic perturbations.
Another urgent task of studying the EGF in remote areas is detailed gravity measurements in transit zones with depths starting at 0 m. Conventional marine surveys are carried out at safe depths of more than 5 m, approximately twice the draft of the vessel. In order to effectively solve the problem of conducting surveys in the conditions of extremely shallow waters, Yuzhmorgeologia has developed and successfully implemented a technology of surveys with the use of Chekan-AM gravimeters onboard hovercraft (Lygin 2013).
The technical specifications of the HIVUS-10 hovercraft provide for the surveys on lines more than 100 km long and at a distance of several tens of kilometers from the base with a sea state not higher than 2. For gravimetric surveys in hard-to-reach areas, the hovercraft with gravimetric and navigation equipment installed in it is placed onboard a carrier vessel which is also supplied with all the necessary equipment for gravimetric surveys. Surveys using hovercraft have been conducted by Yuzhmorgeologia since 2007. They were carried out in the Sea of Azov and its estuaries, in the Pechora Sea, the Baydaratskaya Bay, the Yenisei Gulf, and the Khatanga Gulf.
Gravimeters of the Chekan series are also used to take measurements at land gravimetric stations, including those in hard-to-reach areas of the Earth, such as deserts and transit zones. In this case, Chekan gravimeters are used in much the same way as relative land gravimeters. Measurements are taken on a fixed base for 10 min after the carrier stops. As this takes place, the gravimeter equipment is not unloaded from the minivan. The advantages of using Chekan gravimeters for this type of measurements are an unlimited range of measurements, high performance and full automation of work (Zheleznyak et al. 2015).
Figure 4.18 shows the results of five routes with a Shelf-E gravimeter at the Leningrad gravimetric test site.

Measurement errors at the gravimetric test site points in five test routes
The RMS measurement error was 0.1 mGal. The test results characterize another way of studying the EGF; at the same time, they also show that it is possible in principle to use Chekan gravimeters for maintaining and developing Class 1 state gravimetric grid and creating Class 2 and Class 3 grids, provided that a Chekan gravimeter is transported to gravimetric stations by minivans.
4.2.4 Conclusions
Methodical features of gravimetric surveys in hard-to-reach areas of the Earth using Chekan gravimeters are described.
The results of marine and airborne geophysical surveys in the Arctic and the Antarctic are presented. It is shown that the survey error in airborne gravimetric measurements onboard light turboprop aircraft does not exceed 1 mGal with a spatial resolution of about 7 km.
The potential was discussed for studying hard-to-reach areas of the Earth using promising types of carriers such as hovercraft and airships, as well as using minivans for transporting gravimeters between land survey sites.
4.3 GT-2A Gravimeter All-Latitude Versions
Airborne gravimetric surveys in the polar regions of the Earth have recently been of particular interest to geophysics (Krasnov et al. 2011; Sokolov et al. 2016b; Koneshov et al. 2012; Drobyshev et al. 2011; Mogilevsky et al. 2015). Section 1.3 shows that Schuler oscillations of the GT-2A gravimeter gyro platform are damped in flight with the use of aiding information on the aircraft velocity projected on the free-azimuth coordinate system, in which inertial navigation equations are solved. The free-azimuth coordinate system is determined by the XaYaZa frame obtained from the local ENZ geodetic frame by turning about the vertical axis Z and having a zero absolute angular rate about its vertical axis Za. In the standard configuration of the GT-2A gravimeter, data on the eastern \(V_E^*\) and northern \(V_N^*\) components of the aircraft velocity, delivered by a single-antenna GNSS receiver, are used as aiding data. The specified velocity components are projected onto the instrument axes of the gyro platform using the current value of the compass heading generated by the navigation system of the gravimeter. It is known that the compass heading error increases as the aircraft approaches the pole and, as a result, the level of the gyro platform misalignment errors also increases, which makes it impossible to use GT-2A gravimeters in latitudes higher than ±75° in standard configuration.
The advent of multi-antenna GNSS receivers on the market provided conditions for creating polar versions of the GT-2A gravimeter. These modifications are discussed in the next section.
4.3.1 Using Multi-antenna GNSS Receivers
It was proposed to use a multi-antenna GNSS receiver as a source of information about the aircraft orientation for airborne gravimetric surveys conducted in the polar areas with the use of GT-2A gravimeters. Three versions of the gravimeter with an extended latitudinal range of application were developed.
-
(1)
The so-called near-all-latitude version of GT-2A gravimeter (Smoller et al. 2013, 2015a, b). The gravimeter uses the geodetic heading delivered by a two- or four-antenna GNSS receiver instead of the compass heading. The heading delivered by the multi-antenna GNSS receiver has no disadvantages of the compass heading discussed in Sect. 1.3; however, due to the degeneration of the geographical heading notion at a polar location, this version also leads to a latitude limitation ±89°. This version of the gravimeter firmware was created in 2011 and was given the code GT-2AP. Currently, GT-2AP gravimeters are used in airborne gravimetric surveys at high latitudes by the following companies: GNPP Aerogeophysica, the Schmidt Institute of Physics of the Earth of the Russian Academy of Sciences, Polar Research Institute of China, and Alfred-Wegener-Institut (AWI).
-
(2)
The all-latitude version (Smoller et al. 2013, 2015a, b). In this version, the concept of a geodetic reference frame is not used in intermediate calculations of the four-antenna GNSS receiver. The orientation problem is solved based on the concepts of only two coordinate systems—the one associated with the aircraft body frame and the Greenwich coordinate system (or Earth Centered Earth Fixed (ECEF) reference frame). This version has no special features at polar locations, which made it possible to develop an all-latitude version of the gravimeter capable of operating even directly at the points of the geographic poles. However, this version required a thorough revision of the onboard software of the GT-2A gravimeter and a significant computation burden on its central processing unit (CPU). The latter has led to the need to introduce an additional processor into the gravimeter. In addition, in contrast to the near-all-latitude version discussed above, this version can be used only in the case of using a four-antenna GNSS receiver. This version of the gravimeter was developed in 2012 but it was not put into operation due to its disadvantages mentioned above.
-
(3)
Further development of the proposed software solutions that helped to create an all-latitude version of the gravimeter was made possible owing to the use of quasi-geodetic coordinates known in inertial navigation and the notions of quasi-heading and quasi-track angle derived from them. The latter are the angles between the horizontal projections of the longitudinal axis of the aircraft, its relative velocity vector, and the direction to the quasi-north. The quasi-heading and the quasi-track angle do not have any special features in polar areas (Smoller et al. 2016). This version of the gravimeter allowed it to operate at all latitudes and, in addition, use the simplest and most reliable dual-antenna GNSS receiver. It is also important that this version does not cause any additional load on the gravimeter CPU in terms of the computation burden.
Let us describe this version in more detail.
4.3.2 Quasi-Geodetic Coordinates
Consider one of the possible options for the introduction of quasi-geodetic coordinates described, in particular, in (Belous et al. 2014; Yumanov 2013), taking a sphere as its reference surface.
First, recall the definition of the ECEF coordinate system OXGYGZG (Fig. 4.19) used in the GNSS receiver. Point O is the geometric center of the Earth. The ZG-axis coincides with the Earth’s axis of rotation and is directed to the north, the OXGZG plane is the plane of the Greenwich (zero) meridian, and the OXGYG is the equatorial plane.

Quasi-geodetic coordinates
The point of the Earth’s surface with the geodetic coordinates φ = 0°, λ = 180° is taken as the quasi-north pole Nq; the point with the coordinates φ = 0°, λ = 0° is taken as the quasi-south pole Sq. A circle formed by the geodetic meridians λ = 90°W and λ = 90°E is taken as the quasi-equator (bold line in Fig. 4.19). The plane of the quasi-equator coincides with the plane of the zero meridian. The circle passing through the geodetic poles and the quasi-poles was taken as the initial (zero) quasi-meridian (double line in Fig. 4.19). The plane of the zero quasi-meridian coincides with the equatorial plane.
Multi-antenna GNSS receivers generate the following initial data:
-
1.
\(X_G^* , Y_G^* ,Z_G^*\) are the ECEF coordinates of the baseline antenna;
-
2.
\(V_{XG}^* ,V_{YG}^* ,V_{ZG}^* { }\) are projections of the relative velocity vector of the baseline antenna in the ECEF coordinate system OXGYGZG;
-
3.
\(d_{XG}^* ,d_{YG}^* ,d_{ZG}^*\) are projections of the baseline vector connecting the phase centers of the two antennas installed along the longitudinal axis of the aircraft in the ECEF coordinate system OXGYGZG.
Since the reference surface in the quasi-geodetic coordinate system—the sphere—almost coincides with the Earth ellipsoid for latitudes |φ| > 89°, quasi-track angle GHq* and quasi-heading Kq*can be calculated with sufficient accuracy using the following relations whose output is given in (Smoller et al. 2015a):
4.3.3 All-Latitude Version of the GT-2A Gravimeter
At the request of the developers of the airborne gravimeter GT-2A, the manufacturer, Javad Ltd., implemented the algorithms for calculating quasi-heading \(K^{q*}\) and quasi-track angle \(GH^{q*}\) in the software of the Javad DUO-G3D dual antenna GNSS receivers and the Javad QUATTRO-G3D four-antenna GNSS receivers in accordance with relations (4.3.1)–(4.3.6). As a result, an SY message was added to the Javad GNSS Receiver External Interface Specification (see Table 4.3). This message contains data that allows implementation of three modes in the gravimeter: the standard mode (using a compass heading), near-all-latitude mode (using the geodetic heading from a multi-antenna GNSS receiver), and the new polar mode using the new \(GH^{q*}\) and \(K^{q*}\) calculated in the software of the Javad multi-antenna GNSS receivers.
The software of the airborne gravimeter GT-2AQ (the code of the GT-2A gravimeter version that uses the concept of quasi-geodetic coordinates) was also modified to meet the new requirements.
The projections of the relative velocity of the aircraft onto its body frame \(V_x^* ,\,\,V_y^*\) during the work using quasi-coordinates are calculated in the firmware of the GT-2AQ gravimeter using the following evident relations:
The values of the projections of the aircraft relative velocity on the axes of the free-azimuth coordinate system \(V_{xa}^* ,V_{ya}^*\) needed to damp Schuler oscillations of the gyro platform (see Sect. 1.3) are calculated using the following relations:
where C is the angle between the platform coordinate system and the free-azimuth one;
ASz are the readings of the angle sensor on the external axis of the gimbal suspension (see Fig. 1.3.4 in Sect. 1.3).
The GT-2AQ gravimeter software implements formulas for recalculating the relative velocity components from the aircraft body frame to the free-azimuth coordinate system taking into account not only the readings of the angle sensor on the external axis of the gimbal suspension ASz but also the readings of ASx and ASy of the angle sensors on the internal axes of the gimbal suspension X and Y. For simplicity, relations (4.3.10), (4.3.11) imply that the roll and the pitch of the aircraft are zero, and the terms containing the readings ASx and ASy equal to zero are not shown.
As mentioned above, the methodic errors in calculating the angles of the quasi-heading and the quasi-track angle using relations (4.3.1)–(4.3.6) are negligible when flights are carried out at latitudes |φ| > 89°, where the sphere is a good approximation of the Earth’s ellipsoid. Therefore, in this case, the methodic errors in calculating the projections of the aircraft velocity on the axes of the free-azimuth coordinate system according to relations (4.3.7) and (4.3.11) are also negligible.
Taking into account the preceding, the GT-2AQ all-latitude gravimeter has two operation modes, standard and polar, to be chosen by the operator.
As with the GT-2A gravimeter, the compass heading is used in the standard mode for factory and routine calibrations. The standard mode can be used for flights at latitudes of |φ| < 75° with both multi-antenna and single-antenna GNSS receivers. It should be recalled (see Sect. 1.3) that it is in this mode that the gravimeter gyro platform is stabilized in the geodetic coordinate system.
The geodetic heading from the multi-antenna GNSS receiver (SY message) is used in the polar mode up to the latitude of |φ| < 89°, as is the case with the GT-2AP near-all-latitude version described above. When crossing the latitude |φ| = 89° towards the geographic pole, the gravimeter software automatically switches to using the values of the quasi-heading and the quasi-track angle. In the polar mode, the gravimeter gyro platform is stabilized in the free-azimuth coordinate system. Thus, the GT-2AQ gravimeter version is an all-latitude version capable of functioning even directly at the points of the geographic poles.
4.3.4 Method for Calibration of Instrumental Errors of the Gimbal Suspension Angle Sensor
It follows from (4.3.10), (4.3.11) that, in contrast to the standard-configuration GT-2A gravimeter, the readings of the gimbal suspension angle sensors take part in the damping process of the gyro platform. Since the errors of the angle sensors mainly consist of the first and second harmonics from a complete turn, as practice shows, the leveling accuracy of the gyro platform depends mainly on the ASz error.
The gravimeter developers proposed the procedures and a program to estimate the parameters of the approximating function of the ASz instrumental error.
For this, the gyro platform is rotated about the vertical axis. Based on the difference between the ASz readings and the integral of the readings of the gravimeter FOG, the program estimates the ASz error and four coefficients of its approximation by the first and second harmonics of the ASz readings. The coefficients obtained are entered in the gravimeter as constants and are used in real time to compensate for the ASz error.
The dotted curve in Fig. 4.20 is an estimate of the ASz error. It was obtained by processing sixteen rotations of the gyro platform. The solid curve is the ASz residual error after taking into account the approximating functions. From this curve, it follows that the error has decreased about 4–5 times.

ASz error estimate
4.3.5 Test and Operation Results
The first GT-2AQ gravimeter prototype was road tested prior to the installation on an aircraft. It was installed in the cargo tray of a Mitsubishi Triton pickup truck (Fig. 4.21). A Javad QUATTRO-G3D four-antenna GNSS receiver was also installed on the pickup truck. Its output information stream had a new SY message containing the values of the quasi-track angle and the quasi-heading.

GT-2AQ gravimeter with Javad QUATTRO-G3D GNSS antennas in the cargo tray of a pickup truck
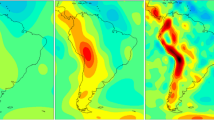
The tests were conducted on September 21, 2015. The test route was located 80 km south of Perth, Western Australia (Fig. 4.22, left). Prior to the tests, initial reference measurements were made at a point located in the vicinity of the test route.

Road test area and the route
The average speed of the vehicle was approximately 97 km/h. First, the truck was moving southward along the Forrest Highway. The route was approximately 14 km long (the red line on the right side of Fig. 4.22). At the end of the route, the truck made a U-turn and continued moving in the opposite direction. The motion cycle was repeated: two runs southward, and two northward, following the same route.
Then, the truck returned to the starting point for final reference measurements.
The GNSS base station was installed on the roof of a building in the city of Perth.
The test results for the four survey lines are presented in Fig. 4.23. The red line shows the average value of the gravity anomaly for four survey lines.

Road test results
Average measurement time was 100 s.
Table 4.4 shows the estimated RMS deviation of the measured gravity anomaly value from its average value obtained for four survey lines.
The results presented in Table 4.4 are not inferior to the typical results of airborne gravimetric measurements with a GT-2A gravimeter, which confirms the fact that this gravimeter version is ready for surveys in high latitudes. The test results presented in Fig. 4.23, once again confirmed the imperturbability of the gyro platform of the GT-2 gravimeter by the vehicle maneuvering.
The road tests confirmed the effectiveness of the gravimeter version under consideration; however, they are of interest in themselves. The point is that some road tests carried out with the first prototypes of the GT-2A gravimeter having a dynamic measurement range of ±0.5 g showed unacceptable results because of the GSE saturation during the tests.
It was for the first time that the road tests confirmed the feasibility of taking gravimetric measurements with the use of a GT-2A gravimeter installed on a truck (dynamic measurement range ±1 g) while the truck was moving along an asphalt road.
4.3.6 Polar Versions of the GT-2A Gravimeter
GNPP Aerogeophysica has been using near-all-latitude versions of the GT-2AP gravimeter (latitude range of application: ±89°) since 2013 to conduct airborne gravimetric measurements from AN-30 aircraft in different areas of the world, including polar regions.
Versions of the GT-2AP gravimeter were installed onboard three Bastler planes of polar aviation to carry out gravimetric measurements in the Antarctic. Figure 4.24 shows photos of an aircraft and a gravimeter in the aircraft cabin.

Bastler aircraft and GT-2AP gravimeter in the aircraft cabin
The GT-2AP gravimeter version was used in the Antarctic by the University of Texas (USA) in 2012–2015 (Richter et al. 2013), Alfred-Wegener-Institut (Germany) in 2014–2016, and the Polar Research Institute of China in 2014–2015.
After the road tests, the GT-2AP gravimeter used by the University of Texas was modified to the GT-2AQ all-latitude version that worked in the Antarctic in 2015–2016.
4.3.7 Conclusions
It has been shown that the latitudinal limitations (±75°) on using the GT-2A gravimeter in its single-antenna GNSS configuration are explained by the fact that the so-called compass heading has special features in high latitudes, which makes it impossible to damp Schuler oscillations of the gyro platform. Three versions of the GT-2A gravimeters with multi-antenna GNSS receivers have been described. All the gravimeters have extended latitude ranges of application. The experimental work has confirmed the effectiveness of the technical solutions implemented in the polar versions of the GT-2 gravimeter.
References
Belous Y, Peshekhonov V, Rivkin B (2014) Mapping support for navigation in high latitudes. Control Eng Russia 3(51):34–36
Blazhnov BA, Nesenyuk LP, Peshekhonov VG, Sokolov AV, Elinson LS, Zheleznyak LK (2002) Integrated mobile gravimetric system. Development and test results. In: Peshekhonov VG (ed) Primenenie graviinertsial’nykh tekhnologii v geofizike (gravity-inertial technologies in geophysics). CSRI Elektropribor, St. Petersburg, pp 33–44
Brozena JM, Salman R (1996) Arctic airborne gravity measurement program. In: Segawa J, Fujimoto H, Okubo S (eds) Gravity, geoid and marine geodesy, IAG series vol 117. Springer Verlag, pp 131–139
Chesnokova TS, Grushinsky NP (1961) Gravimetric measurements in the Greenland Sea in 1956 on the Ob diesel-electric vessel. In: Fedynsky VV (ed) Morskie gravimetricheskie issledovaniya (Marine Gravimetric Studies). Collection of articles. Moscow University Publishing House, Moscow, pp 37–41
Drobyshev NV, Koneshov VN, Klevtsov VV, Soloviev VN, Lavrentieva EY (2008) Development of an aircraft laboratory and a procedure for Arctic airborne gravimetric surveys. Seismicheskie Pribory 44(3):5–19
Drobyshev NV, Koneshov VN, Pogorelov VV, Rozhkov YE, Solov’ev VN (2009) Specific features of the technique of airborne gravity surveys at high latitudes. Izvestiya. Phys Solid Earth 45(8):656–660
Drobyshev NV, Koneshov VN, Koneshov IV, Soloviev VN (2011) Development of an aircraft laboratory and a procedure for Arctic airborne gravimetric surveys. Vestnik Permskogo Universiteta. Geologiya Series 3:37–50
Ekspeditsionnye issledovaniya VNIIOkeangeologii v Arktike, Antarktike i Mirovom okeane v 2005 godu (VNIIOkeangeologiya Survey Studies in the Arctic, Antarctic, and World Ocean in 2005). VNIIOkeangeologiya, St. Petersburg
Forsberg R, Kenyon S (2004) Gravity and geoid in the arctic region—the northern gap now filled. In: Proceedings of the second international GOCE user workshop, Italy
Forsberg R, Olesen AV, Yildiz H, Tscherning CC (2011) Polar gravity fields from GOCE and airborne gravity. In: Proceedings of 4th international GOCE user workshop, ESA SP–696
Forsberg R, Olesen AV, Einarsson I (2015) Airborne gravimetry for geoid determination with Lacoste Romberg and Chekan gravimeters. Gyroscopy and Navigation 6(4):265–270
Gaynanov AG (1961) Gravimetric measurements on the Ob diesel-electric vessel in the first Antarctic project. In: Fedynsky VV (ed) Morskie gravimetricheskie issledovaniya (Marine Gravimetric Studies). Collection of articles. Moscow University Publishing House, Moscow, pp 23–36
Kazanin GS, Ivanov GI, Kazanin AS, Vasilyev AS, Makarov ES (2015) Arctic 2014 survey: integrated geophysical research at the North Pole. In: Vesti gazovoy nauki (Gas Science News). Collection of Articles 2:92–97
Kazanin GS, Zayats IV, Ivanov GI, Makarov ES, Vasiliev AS (2016) Geophysical exploration at the North Pole. Oceanology 56(2):311–313
Koneshov VN, Nepoklonov VB, Stolyarov IA (2012) Using modern geopotential models in studying vertical deflections in the Arctic. Gyroscopy and Navigation 3(4):298–307
Koneshov VN, Klevtsov VV, Solov’ev VN (2016) Upgrading the GT-2A aerogravimetric complex for airborne gravity measurements in the Arctic. Izvestiya. Phys Solid Earth 52(3):452–459
Krasnov AA, Sokolov AV (2009) Studying the gravity field of hard-to-reach Earth areas using the Chekan-AM mobile gravimeter. Trudy Instituta Prikladnoi Astronomii RAN 20:353–357
Krasnov AA, Nesenyuk LP, Sokolov AV, Stelkens-Kobsch TH, Heyen R (2007) The results of the new airborne gravimeter tests. In: IAG international symposium on terrestrial gravimetry: static and mobile measurements (TG-SMM2007), St.Petersburg, Russia, pp 73–78
Krasnov AA, Sokolov AV, Usov SV (2010) Results of regional aerogravimetric surveys conducted in the Arctic with the use of gravimeter Chekan-AM. In: IAG international symposium on terrestrial gravimetry: static and mobile measurements (TG-SMM2010), St. Petersburg, Russia, pp 27–32
Krasnov AA, Sokolov AV, Usov SV (2011) Modern equipment and methods for gravity investigation in hard-to-reach regions. Gyroscopy and Navigation 2(3):178–183
Krasnov AA, Sokolov AV, Elinson LS (2014a) Operational experience with the Chekan-AM gravimeters. Gyroscopy and Navigation 5(3):181–185
Krasnov AA, Sokolov AV, Elinson LS (2014b) A new air-sea shelf gravimeter of the Chekan series. Gyroscopy and Navigation 3:131–137
Krasnov AA, Sokolov AV, Rzhevskiy NN (2015) First airborne gravity measurements aboard a dirigible. Seismic Instruments 51(3):252–255
Litinsky VA (1972) Experience of using gravimetric observations on an icebreaker. In: Fedynsky VV (ed) Morskie gravimetricheskie issledovaniya (Marine Gravimetric Studies). Collection of articles. Moscow University Publishing House, Moscow, pp 127–142
Lygin VA (2013) Gravimetric survey in the Arctic transit zones. In: IAG international symposium on terrestrial gravimetry: static and mobile measurements (TG-SMM2013), St. Petersburg, Russia, pp 63–65
Mogilevsky VE, Kontarovich OR (2015) Airborne gravimetric studies in the Arctic. Neft’. Gaz. Novatsii 2:36–40
Mogilevsky VE, Pavlov SA, Kontarovich OR, Brovkin GI (2015) Features of airborne geophysical surveys in high latitudes. Razvedka i Okhrana Nedr 12:6–10
Palamarchuk VK, Poselov VA, Glinskaya NV, Kirsanov SN, Makarov VM, Pryalukhina LA, Subbotin KP, Mishchenko ON, Lokshina VA, Demina IM, Sharkov DV, Kalinin VA (2008) Airborne geophysical survey in the junction zone of the Lomonosov Ridge with the shelf of the Laptev and East Siberian Seas (Arctic-2007). In: Ekspeditsionnye issledovaniya VNIIOkeangeologiya v 2007 godu (VNIIOkeangeologiya Survey Studies in 2007), VNIIOkeangeologia, St. Petersburg, pp 21–30
Peshekhonov VG, Sokolov AV, Krasnov AA, Atakov AI, Pavlov SP (201) Joint analysis of high-accuracy marine and airborne gravity surveys with Chekan-AM gravimeters in the Arctic basin. In: 4th IAG international symposium on terrestrial gravimetry: static and mobile measurements (TG-SMM2016), St. Petersburg, Russia, pp 26–32
Pyle TE, Ledbetter M, Coakley B, Chayes D (1997) Arctic ocean science. Sea Technol 38(10):10–15
Richter TG, Greenbaum JS, Young DA, Blankenship DD, Hewison WQ, Tuckett H (2013) University of Texas airborne gravimetry in Antarctica, 2008 to 2013. In: IAG international symposium on terrestrial gravimetry: static and mobile measurements (TG-SMM2013), St. Petersburg, Russia
Russian Arctic geotraverses (2011) In: Poselov VA, Avetisov GP, Kaminsky VD (eds) Trudy NIIGA-VNIIOkeangeologia (Proceedings of VNIIOkeangeologiya), vol 220, pp 21–25
Smoller YL, Yurist SS, Fedorova IP, Bolotin YV, Golovan AA, Koneshov VN, Hewison W, Richter T, Greenbaum J, Young D, Blankenship D (2013) Using airborne gravimeter GT2A in polar areas. In: IAG international symposium on terrestrial gravimetry: static and mobile measurements (TG-SMM2013), St.Petersburg, Russia
Smoller YL, Yurist SS, Golovan AA, Yakushik LY (2015a) Using a multiantenna GPS receiver in the airborne gravimeter GT-2a for surveys in polar areas. Gyroscopy and Navigation 6(4):299–304
Smoller YL, Yurist SS, Golovan AA, Yakushik LY (2015b) Using a multiantenna GPS receiver in the airborne gravimeter GT2a for surveys in polar areas. 22nd St. Petersburg international conference on integrated navigation systems, St. Petersburg: Elektropribor
Smoller YL, Yurist SS, Golovan AA, Iakushyk LY, Hewison W (2016) Using quasicoordinates in software of multi-antenna GPS receivers and airborne gravimeter GT-2A for surveys in polar areas. In: 4th IAG international symposium on terrestrial gravimetry: static and mobile measurements (TG-SMM2016), St.Petersburg, Russia
Sokolov AV, Krasnov AA, Konovalov AB (2016a) Measurements of the acceleration of gravity on board of various kinds of aircraft. Meas Tech 59(6):565–570
Sokolov AV, Krasnov AA, Koneshov VN, Glazko VV (2016b) The first high precision gravity survey in the North Pole region. Izvestiya. Phys Solid Earth 52(2):254–258
Stroyev PA, Panteleev VL, Levitskaya ZN, Chesnokova TS (2007) Podvodnye ekspeditsii GAISh (Iz istorii nauki) (Underwater Expeditions by Sternberg Astronomical Institute. History of Science). KDU, Moscow
Wziontek H, Wilmes H, Bonvalot S (2009) AGrav—an international database for absolute gravity measurements. IAG 2009 General Assembly, Buenos Aires, Argentina, Aug 31–Sept 4, 2009
Yumanov VS (2013) Algorithm for the transformation of quasigeographic coordinates for using various ellipsoids. In: 15 konferentsiya molodykh uchenykh “Navigatsiya i upravlenie dvizheniem” (15th Conference of Young Scientists “Navigation and Motion Control), St. Petersburg: Elektropribor
Zheleznyak LK, Koneshov VN, Krasnov AA, Sokolov AV, Elinson LS (2015) The results of testing the Chekan gravimeter at the Leningrad gravimetric testing area. Izvestiya. Phys Solid Earth 51(2):315–320
Zhonglovich ID (1950) Gravimetric stations in the Arctic determined on the Sadko and G. Sedov icebreakers in 1935–1940. In: Trudy dreifuyushchei ekspeditsii Glavsevmorputi na ledokol'nom parokhode "G. Sedov", 1937–1940 (Proceedings of the Glavsevmorput Drifting Expedition on the G. Sedov Icebreaker, 1937–1940). Glavsevmorput Publishing House, Moscow–Leningrad
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2022 The Author(s), under exclusive license to Springer Nature Switzerland AG
About this chapter

Cite this chapter
Koneshov, V. et al. (2022). Studying the Gravity Field in Hard-to-Reach Areas of the Earth. In: Peshekhonov, V.G., Stepanov, O.A. (eds) Methods and Technologies for Measuring the Earth’s Gravity Field Parameters. Earth Systems Data and Models, vol 5. Springer, Cham. https://doi.org/10.1007/978-3-031-11158-7_4
Download citation
DOI: https://doi.org/10.1007/978-3-031-11158-7_4
Published:
Publisher Name: Springer, Cham
Print ISBN: 978-3-031-11157-0
Online ISBN: 978-3-031-11158-7
eBook Packages: Physics and AstronomyPhysics and Astronomy (R0)