
Abstract
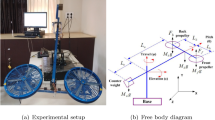
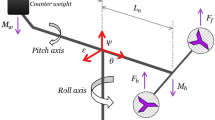
This paper investigates the use of a dual-loop control system for a laboratory helicopter with three degrees of freedom, namely pitch, elevation and travel. The goal consists of following a travel reference at constant elevation while limiting pitch excursion. A first-principles model of the helicopter was initially employed to design the inner loop through a Discrete Linear Quadratic Regulator (DLQR) formulation. With this stabilising controller in place, the step response to a travel command was acquired to design a Dynamic Matrix Control (DMC) scheme with pitch constraints. The dual-loop architecture was implemented in a multirate manner, with DMC acting as a command governor for the DLQR controller. Experimental results are presented to show the efficacy of the overall control system.
Access this chapter
Tax calculation will be finalised at checkout
Purchases are for personal use only
Similar content being viewed by others

References
Camacho, E., Bordons, C.: Model Predictive Control, 2nd edn. Springer-Verlag, London (2007). https://doi.org/10.1007/978-0-85729-398-5
Qin, S.J., Badgwell, T.A.: A survey of industrial model predictive control technology. Control. Eng. Pract. 11(7), 733–764 (2003)
Cutler, C.R., Ramaker, B.L.: Dynamic matrix control a computer control algorithm. In: Proceedings of the 17th Joint Automatic Control Conference, vol. 17, p. 72 (1980)
Garcia, C.E., Morshedi, A.M.: Quadratic programming solution of dynamic matrix control (QDMC). Chem. Eng. Commun. 46(1–3), 73–87 (1986)
Chaber, P., Ławryńczuk, M.: Fast analytical model predictive controllers and their implementation for STM32 ARM microcontroller. IEEE Trans. Industr. Inf. 15(8), 4580–4590 (2019)
Ding, Z., Yang, Z., Chen, C., Chen, W., Chen, H., Liu, Z.: Improved sliding mode dynamic matrix control strategy: application on spindle loading and precision measuring device based on piezoelectric actuator. Mech. Syst. Signal Process. 167, 108543 (2022)
Eshaghi, S., Kharrati, H., Badamchizadeh, M.A., Hasanzadeh, I.: A predictive controller based on dynamic matrix control for a non-minimum phase robot manipulator. Int. J. Control, Autom. Syst. 10(3), 574–581 (2012)
Kassapakis, E.G., Warwick, K.: Predictive algorithm for the roll control autopilot of a jet fighter aircraft. Int. J. Adapt. Cont. Sig. Proc. 8(4), 359–368 (1994)
Calugaru, G., Danisor, E.A.: Dynamic matrix control used in stabilizing aircraft landing. In: Proceedings of the International Conference on Applied and Theoretical Electricity (2016)
Calugaru, G.C., Resceanu, I.C., Danisor, A.E.: Aircraft landing and attitude control using dynamic matrix control. Robot. Manag. 22, 9–17 (2017)
Eren, U., Prach, A., Koçer, B.B., Raković, S.V., Kayacan, E., Açıkmeşe, B.: Model predictive control in aerospace systems: current state and opportunities. J. Guid. Control. Dyn. 40(7), 1541–1566 (2017)
Maia, M.H.: Robust predictive control of a helicopter with three degrees of freedom subject to external disturbances, M.Sc. Dissertation, Instituto Tecnológico de Aeronáutica, São José dos Campos (2008). (in Portuguese)
Franklin, G.F., Powell, J.D., Workman, M.: Digital Control of Dynamic Systems, 3rd edn. Ellis-Kagle Press, Half Moon Bay (1998)
Van Baelen, D., Ellerbroek, J., (René) van Paassen, M.M., Mulder, M.: Design of a haptic feedback system for flight envelope protection. J. Guidance Control Dyn. 43(4), 700–714 (2020)
Bryson, A.E., Ho, Y.C.: Applied Optimal Control. Hemisphere Publishing Corporation, Washington, DC (1975)
Johnson, M.A., Grimble, M.J.: Recent trends in linear optimal quadratic multivariable control system design. IEE Proc. D 134, 53–71 (1987)
Acknowledgments
R. K. H. Galvão acknowledges the support of Conselho Nacional de Desenvolvimento Científico e Tecnológico (CNPq, Brazil) under grant 303393/2018-1 (Research Fellowship). A. Caregnato-Neto acknowledges the support of Coordenação de Aperfeiçoamento de Pessoal de Nível Superior - Brasil (CAPES) - Finance Code 001.
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2022 The Author(s), under exclusive license to Springer Nature Switzerland AG
About this paper

Cite this paper
Ferreira, A.S.R., Caregnato-Neto, A., Galvão, R.K.H., Afonso, R.J.M. (2022). Dynamic Matrix Control of a 3DOF Helicopter with Stabilising Inner Loop. In: Brito Palma, L., Neves-Silva, R., Gomes, L. (eds) CONTROLO 2022. CONTROLO 2022. Lecture Notes in Electrical Engineering, vol 930. Springer, Cham. https://doi.org/10.1007/978-3-031-10047-5_20
Download citation
DOI: https://doi.org/10.1007/978-3-031-10047-5_20
Published:
Publisher Name: Springer, Cham
Print ISBN: 978-3-031-10046-8
Online ISBN: 978-3-031-10047-5
eBook Packages: Intelligent Technologies and RoboticsIntelligent Technologies and Robotics (R0)