
Abstract
Multiple faults diagnosis is a critical problem in mechanical fault diagnosis. Fault behavior analysis aims to find out the response characteristics of operating parameters under different faults and is the most primitive task for multiple faults diagnosis. This paper proposes a bond graph-based approach to analyse the mechanical fault behavior for diagnosis. The analytical model of an engineering system is firstly established via bond graph. The temporal causal graph is derived from the bond graph model to depict the analytic relationships system variables. The operating parameters response characteristics under different faults are then derived by representing the faults with abnormal change of system variables. The approach is illustrated via an engine lubrication system. The presented approach avoids time-consuming formula transformation which is necessary in mathematical model-based approach, and therefore provides an efficient for fault behavior analysis.
Access provided by Autonomous University of Puebla. Download conference paper PDF
Similar content being viewed by others

Keywords
- Multiple faults diagnosis
- Fault behavior analysis
- Bond graph
- Temporal causal graph
- Engine lubrication system
1 Introduction
A complex mechanical system will inevitably suffer from various failures during its service cycle. Condition monitoring and fault diagnosis (CMFD) technique aims to pinpoint the origin of an abnormality timely if it presents, which provides an effective means to ensure the safe and high-efficient operation of a complex mechanical system.
The diagnosis of multiple faults diagnosis is a crucial task in CMFD [1,2,3,4]. It can be divided into 4 different steps: fault behavior analysis, fault description and feature selection, fault detection, and fault isolation. Fault behavior analysis aims to find out the fault propagation path and the response characteristics of operating parameters under different faults, which is the most primitive task among the 4 tasks.
Correlation analysis and fault tree are two primary approaches for fault behavior analysis. Correlation analysis takes advantage of mathematical statistics theory to deal with the sample data of two state variables, and investigates the correlation of variables according to the data distribution regularities. This approach has been successfully used to study the causal relationships of mechanical faults and symptoms for some equipment [5, 6]. However, a large number of typical fault sample data is the prerequisite for this method. In practice, high-quality data is not always available for different machines, which limits this method to being widely used in real-world.
Fault tree is another method for fault behavior analysis [7,8,9]. Different from correlation analysis, this method takes the most undesired fault as Top Event, and then describes the propagation path of the target fault via an inverted tree structure. The causal relationships of faults and symptoms are therefore derived by exploring this tree. Fault tree gets rid of the dependency on sample data, however, the fault propagation path are actually modeled according to experts’ subjective experience. Thus, different experts may give different diagnostic results. Besides, a fault tree for multiple fault diagnosis often requires a very complete expert knowledge base, which is usually difficult to obtain in practice.
Some researchers also use the commercial software to investigate the mechanical fault behavior [10], e.g. AMESim for hydraulic valve leakage, GT-Power for engine misfire. Although this approach provides an efficient way for fault behavior analysis, the fault type that commercial software can deal with limited by the component libraries the software can provide. Thus, commercial software-based approach is found limited in some cases.
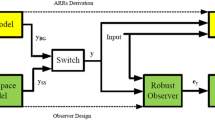
Mathematical model-based approach is an alternative way to pursue the causal relationships of faults and symptoms for diagnosis. This approach firstly describes the working process of a mechanical system via a series of analytical redundancy relations (ARRs), and then introduces the interested fault by changing the state variable, the operating parameters response characteristics under different faults can be got accordingly. Despite this approach gets rid of the dependency on sample data, and avoids the influence of experts’ subjective experience at the same time, mathematical model-based approach suffers severely from the enormous cost of modeling and calculation. Take a diesel engine as an example, up to 1640 ARRs can be generated from the 39 differential equations and algebraic equations (required to model the dynamic behaviors of the engine) to depict the dependency among the variables [11,12,13].
Bond graph is a graphical modeling methodology. It models an engineering system by considering the energy flows between the components. Different bond elements are used to describe the storage, release, transfer and conversion of the energy. A complete model of an engineering system is constructed via combining the various bond elements according to the connection of components. Bond graph is a domain-independent modeling method (it can describe the system from different domains, e.g. electrical, mechanical, hydraulic, in the same way), therefore it is a powerful tool for modeling engineering systems when different physical domains are involved. Besides, not constructing the ARRs directly, bond graph firstly takes use of graphical elements to represent the interaction of system components and then derives the mathematical analytical equation from the graphical model. Compare with the conventional mathematical model-based approach, bond graph simplifies the construction of ARRs and therefore provides an effective way for fault behavior analysis.
This paper presents a bond graph-based approach to analyse the mechanical fault behavior for diagnosis. The analytical model of an engineering system is firstly established via bond graph. The temporal causal graph is derived from the bond graph model to depict the analytic relationships system variables. The operating parameters response characteristics under different faults are then derived by representing the faults with abnormal change of system variables. The approach is illustrated via an engine lubrication system. The rest of this paper is organized as follows. Section 2 introduces the structure and working principle of engine lubrication system. Section 3 describes the presented approach and illustrated using an engine lubrication system. The model and the presented approach are verified in Sect. 4. Finally, Sect. 11 summaries the paper.
2 Example: Engine Lubrication System
Lubrication system is one of the most crucial systems in diesel engine, which supplies enough oil to the engine friction pair to guarantee the safe and reliable operation of a diesel engine. Fault diagnosis is a vital task to guarantee the safe operation of engine lubrication system.
A schematic diagram of a typical marine diesel engine lubrication system is shown as Fig. 1. The gear pump is driven by crankshaft through a transmission gear or a belt. A relief valve is usually installed after the oil pump to prevent the damage caused by excessive oil pressure. The lubricating oil then enters the oil cooler to keep a certain temperature. The oil cooler is usually connected in parallel with a thermostatic valve to control the oil temperature. The cooled lubricating oil enters the filter. Each filter is connected in parallel with a bypass valve to prevent the engine lubrication failure caused by filter clogging. The main oil gallery is usually installed with a pressure relief valve to adjust the pressure of the lubricating oil. Besides lubricating the friction pair, the lubricating oil can also take heat away from the engine body to make the pistons, crankshafts and other components working at a certain temperature.

A typical marine diesel engine lubrication system
3 Fault Behavior Analysis Using Bond Graph-Based Approach
3.1 Modeling the System Dynamic Behavior Based on Bond Graph
3.1.1 Bond Graph Theory
In bond graph, four generalized variables: effort \(e\left( t \right)\), flow \(f\left( t \right)\), momentum \(p\left( t \right)\) and displacement \(q\left( t \right)\) are defined to represent the energy flow in any systems. The effort \(e\left( t \right)\), flow \(f\left( t \right)\) are two basic variables, where the power of the instantaneous energy flow is product of these two variables, see Eq. (1).
Momentum \(p\left( t \right)\) and displacement \(q\left( t \right)\) are defined as
Six basic elements are defined to model the components in real systems, see Fig. 2. Figure 2a shows the effort source \(S_e\) and flow source \(S_f\), which often used to describe the energy source with a specific effort/flow level. Figure 2b shows the three passive elements: R-element, C-element and I-element. R-element is used to describe the components which dissipate energy, e.g. dampers, frictions and electric resistors in real-life systems. C-element and I-element are used to represent the components which store all kinds of energy. Specifically, in C-element, the energy is stored by accumulating the net flow, and in I-element, the energy is stored by accumulating the net effort.

Basic elements of bond graph
Figure 2c, d show the two-port elements: transformer and gyrator respectively, which are usually used to represent the energy conversion both in same energy form and different energy form. Variables \(m\) and \(r\) are called transformer module and gyrator ratio respectively.
Figure 2e, f are two junctions, which are used to represent the conservation of energy. The 0-junction is also named common effort junction, which is used to connect the elements with equal efforts. The 1-junction is also named common flow junction, which is used to connect the elements with equal flows.
Although bond graph had been successfully applied in electrical, mechanical, hydraulic domains, it was found limited in thermodynamics domain. To solve this problem, Karnopp proposed pseudo bond graphs [14]. Different from classical bond graph (or power bond graph), temperature \(T\) and heat flow rate \(\dot{E}\) are chosen as effort source \(S_e\) and flow source \(S_f\) in pseudo bond graphs (\(\dot{E}\) is already a power term). The convection of heat is therefore represented via a two-port R-element, see Fig. 3. The variables \(T_{in}\) and \(\dot{E}_{in}\) represent the inlet temperature and heat flow rate, while \(T_{out}\) and \(\dot{E}_{out}\) represent the outlet temperature and heat flow rate. The differential equation can be written as Eq. (3). The thermodynamic equations derived by this way match the Euler method very well, which makes pseudo bond graphs being widely used in thermodynamics domain.

The 2-port R-element representing convection in pseudo bond graphs
3.1.2 Mechanical Domain
We model the dynamic behavior of engine lubrication system based on bond graph theory. The working of engine lubrication system involves three domains: mechanical, hydraulic and thermodynamic. We model the mechanical domains first. The crankshaft is modeled by a flow source \(S_f\). The gear pump is connected with crankshaft via a set of transmission gear or a belt. The transmission is modeled via a transformer TE where the transformer module \(i\) represents the transmission ratio. Parameter \(R_{effic}\) describes the energy loss while transmission. Since the pump has a certain mass, it will consume some energy while working. We describe this process via \(I_{pump}\). The bond graph model of mechanical domains can be seen as Fig. 4.

The bond graph model of engine lubrication system
3.1.3 Hydraulic Domain
The pump converts the mechanical energy into hydraulic energy, which can be modeled via a transformer TE. \(R_{pleak}\) represents the leakage of oil pump. The oil flow through the cooler is governed by the parameters \(R_{cooler}\) and \(C_{cooler}\), which represent the fluidic resistor and hydraulic volume respectively. The thermostatic valve presents a narrow opening and is modeled via a resistance \(R_{thermo}\), which is also connect in parallel with cooler. The filter and bypass valve has similar physical effect with cooler and thermostatic valve, so that they have Similar model structure. We regard the engine body as a resistor for oil flow, therefore it is represented via \(R_{block}\). \(R_{mrelief}\) describes the fluidic resistor of pressure regulating valve.
3.1.4 Thermal Domain
The working engine can be seen as a heat source which is therefore represented as \(S_f\). The components of engine is modeled as \(C_{Tgallery}\). \(C_{Tsump}\) is the heat of oil sump. The oil in sump will dissipation to air, we model the heat dissipation via \(R_{Tsump}\). The temperature of environment is thought as constant, so it is modeled as \(S_e\). The oil flows into cooler under the working of pump. We model the heat capacity of cooler as \(C_{Tcooler}\). The dissipated heat is represented by \(MS_f\). The model of oil filter is similar with cooler. The transmitted heat is not only related to temperature, but also to mass flow. So the thermodynamic model is connected with hydraulic part via two-port R-element.
The bond graph model of engine lubrication system is shown as Fig. 4. \(R_{leak}\) represents the leak oil through oil pipe, and it is quantize by \(Q_{leak}\).
3.2 Analysing the Parameters Response Characteristics Using Temporal Causal Graph
Although we can derive the analytical redundancy relations and analyse the fault behavior through the ARRs, this work is thought to be time-consuming and error-prone. Temporal Causal Graph (TCG) is a signal flow diagram, in which the variables are represented as vertices and the relations between the variables as directed edges, and the relations type are described via a set of labels \(L = \left\{ {1, - 1, = ,\lambda ,1/\lambda ,\lambda \rm{d}t,\lambda /\lambda \rm{d}t} \right\}\). Specifically, 1, \(\lambda\) and \(1/\lambda\) describe the positive correlation, in which the coefficients of association are 1, \(\lambda\) and \(1/\lambda\) respectively; −1 represents the negative correlation; = means two variables are equationual in number; \(\lambda \rm{d}t\) and \(1/\lambda \rm{d}t\) represent the integral relationships in which the parent nodes are the time derivatives of child nodes. The TCG can be derived directly from the bond graph model, see [15].
The TCG model of engine lubrication system derived from the bond graph is shown as Fig. 5. Since the TCG describes the functional relationships of variables intuitively, it can conveniently be used to analyse the parameters response characteristics under different faults. Taking filter blocking as an example, the fault behavior can be shown as Fig. 6. The loop in TCG represents the negative feedback, e.g. the filter blocking will decrease the \(Q_{27}\), as for loop \(Q_{27} \to p_{27} \to p_{25} \to Q_{25}\), we have \(Q_{27} \downarrow \to p^{\prime}_{27} \downarrow \to p^{\prime}_{25} \downarrow \to Q^{\prime}_{25} \downarrow \to Q^{\prime}_{27} \uparrow\). The first order derivative of \(Q_{27}\) increases, therefore \(Q_{27}\) will finally reach a constant value. We investigate 11 faults of engine lubrication system and the response of 8 working parameters, see Tables 1 and 2. The fault behavior is shown as Table 3, in which +1 represents the occurrence of fault would increase the parameter (also marked with red), and −1 is present otherwise (also marked with blue).

Temporal causal graph of diesel engine lubrication system

Failure behavior analysis of filter blocking
4 Experimental Validation
In this section, we introduce some faults (in total 7 faults) shown in Table 1 and the working parameters in Table 2 are detected accordingly. The engine is an in-line 2 cylinders water-cooled marine engine, see Fig. 7. The engine is connected with a reduction gear box. The propeller is installed in a pipe loop which is filled with water. A flow adjusting valve is set at the middle of the pipe loop to give an adjustable load.

Test cell of a Beta 14 marine engine
The experiments are carried out at 2000 r/min and 25%, 50%, 75% load respectively. The parameters at 75% load are presented as Table 4.
It can be seen from Table 4 that the working parameters present abnormal changes under different faults, and the abnormal changes got from experiment data meet well with Table 3. Take filter blocking as an example, Table 4 shows that lubrication oil pressure after pump and the pressure before filter increase 0.1 bar compared with the one at engine normal condition (+1 in Table 3). On the contrary, the pressure after filter and pressure before engine decrease 1.5 bar (−1 in Table 3). As for the temperature, the temperature at different position all increase compared with normal values (+1 in Table 3). The results show that the fault behavior can be got using bond graph combining with TCG.
5 Conclusions
In this paper, we present a bond graph-based approach to analyse the fault behavior for diagnosis. The approach is demonstrated via an engine lubrication system. Results show that the presented approach can exactly derive the response characteristics of operating parameters under different faults. This approach avoids time-consuming formula transformation which is necessary in mathematical model-based approach, and therefore provides an efficient for fault behavior analysis.
References
Li, Z., Jiang, Y., Hu, C., Peng, Z.: Recent progress on decoupling diagnosis of hybrid failures in gear transmission systems using vibration sensor signal: a review. Measurement 90, 4–19 (2016)
Zhang, S., He, Q., Ouyang, K., Xiong, W.: Multi-bearing weak defect detection for wayside acoustic diagnosis based on a time-varying spatial filtering rearrangement. Mech. Syst. Sig. Process 100, 224–241 (2018)
Shao, H., Jiang, H., Lin, Y., Li, X.: A novel method for intelligent fault diagnosis of rolling bearings using ensemble deep auto-encoders. Mech. Syst. Sig. Process 102, 278–297 (2018)
Diehl, E.J.: Predictive modeling of a two-stage gearbox towards fault detection. Shock Vib. 2016(17), 1–13 (2016)
Chen, P., Toyota, T., He, Z.J.: Automated function generation of symptom parameters and application to fault diagnosis of machinery under variable operating conditions. IEEE Trans. Syst. Man Cybern. Part A Syst. Humans 31(6), 775–781 (2001)
Sekhar, A.S.: Multiple cracks effects and identification. Mech. Syst. Sig. Process. 22(4), 845–878 (2008)
Bobbio, A., Portinale, L., Minichino, M., Ciancamerla, E.: Improving the analysis of dependable systems by mapping fault trees into Bayesian networks. Reliab. Eng. Syst. Saf. 71(3), 249–260 (2001)
Khakzad, N., Khan, F., Amyotte, P.: Safety analysis in process facilities: comparison of fault tree and Bayesian network approaches. Reliab. Eng. Syst. Saf. 96, 925–932 (2011)
Bartlett, L.M., Hurdle, E.E., Kelly, E.M.: Integrated system fault diagnostics utilizing diagraph and FT-based approach. J. Reliab. Eng. Syst. Saf. 94, 1107–1115 (2009)
Guowei, S.: Study on the Method of Diesel Engine Fault Diagnosis Based on Ant Clustering Algorithm. Harbin Engineering University, Harbin (2014)
Wahlström, J., Eriksson, L.: Modelling diesel engines with a variable-geometry turbocharger and exhaust gas recirculation by optimization of model parameters for capturing non-linear system dynamics. PI Mech. Eng. 225(7), 960–986 (2011)
Svärd, C., Nyberg, M., Frisk, E., Krysander, M.: Automotive engine FDI by application of an automated model-based and data-driven design methodology. Control Eng. Pract. 21(4), 455–472 (2013)
Chi, G., Wang, D., Le, T., Yu, M., Luo, M.: Sensor placement for fault isolability using low complexity dynamic programming. IEEE Trans. Autom. Sci. Eng. 12(3), 1080–1091 (2015)
Karnopp, D.: State variables and pseudo bond graphs for compressible thermofluid systems. J. Dyn. Syst. Meas. Contr. 101, 201–204 (1979)
Mosterman, P.J., Biswas, G.: Diagnosis of continuous valued systems in transient operating regions. IEEE Trans. Syst. Man Cybern. Part A Syst. Humans 29(6), 554–565 (1999)
Acknowledgements
This work was supported by the Fundamental Research Funds for the Central Universities (Grant No: 2021QN1089).
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2023 The Author(s), under exclusive license to Springer Nature Switzerland AG
About this paper

Cite this paper
Wang, J., Zhao, S., Ma, X., Gu, F. (2023). Analysing the Fault Behavior of a Complex Mechanical System for Diagnosis: A Bond Graph-Based Approach. In: Zhang, H., Feng, G., Wang, H., Gu, F., Sinha, J.K. (eds) Proceedings of IncoME-VI and TEPEN 2021. Mechanisms and Machine Science, vol 117. Springer, Cham. https://doi.org/10.1007/978-3-030-99075-6_30
Download citation
DOI: https://doi.org/10.1007/978-3-030-99075-6_30
Published:
Publisher Name: Springer, Cham
Print ISBN: 978-3-030-99074-9
Online ISBN: 978-3-030-99075-6
eBook Packages: EngineeringEngineering (R0)