
Abstract
Möbius surfaces and hyperbolic ends are key tools used in the study of geometrically finite three-dimensional hyperbolic manifolds. We review the theory of Möbius surfaces and describe a new framework for the theory of hyperbolic ends. We construct the ideal boundary functor sending hyperbolic ends into Möbius surfaces, and the extension functor sending Möbius surfaces into hyperbolic ends. We show that the former is a right inverse of the latter, and we show that every hyperbolic end canonically embeds into the extension of its ideal boundary. We conclude by showing that, for any given Möbius surface, there exists a unique maximal hyperbolic end having that Möbius surface for its ideal boundary.
We apply these theories to the study of infinitesimally strictly convex (ISC) surfaces in ℍ3 which are complete with respect to the sums of their first and third fundamental forms (called quasicomplete in the sequel). We prove a new a priori C0 estimate for such surfaces. We apply this estimate to provide a complete solution of a Plateau-type problem for surfaces of constant extrinsic curvature in ℍ3 posed by Labourie in 2000 (Invent Math 141:239–297). We conclude by describing new parametrisations of the spaces of quasicomplete, ISC, constant extrinsic curvature surfaces in ℍ3 by open subsets of spaces of holomorphic functions.
Access provided by Autonomous University of Puebla. Download chapter PDF
Similar content being viewed by others

Keywords
- Hyperbolic ends
- Möbius structures
- Flat conformal structures
- Complex projective structures
- Extrinsic curvature
- Asymptotic Plateau problems
Classification AMS
3.1 Overview
3.1.1 Hyperbolic Ends and Möbius Structures
In the words of Thurston, within the family of all three-dimensional manifolds, hyperbolic three-manifolds make up “by far the most interesting, the most complex, and the most useful” class (see [30]). In this chapter, we will only be concerned with two- and three-dimensional manifolds, which we will henceforth refer to simply as surfaces and manifolds respectively. In addition, in order to avoid an avalanche of unwieldy expressions, we will call a hyperbolic manifold geometrically finite whenever it is complete, oriented, of finite topological type and without cusps. Our aim is to present two of the main constructs used in the study of such manifolds, namely hyperbolic ends and Möbius structures.
Hyperbolic manifolds are locally modelled on three-dimensional hyperbolic space ℍ3. For ease of visualisation, it is helpful to identify this space with the open unit ball \(\Bbb {B}^3_1\) in ℝ3 furnished with the Beltrami–Klein metric
This is called the Beltrami–Klein model of ℍ3 (see [5]). Its most useful property for our purposes is that its metric is affine equivalent to the standard Euclidean metric in the sense that the geodesics of the one coincide, as sets, with the geodesics of the other. In particular, a subset K of the unit ball is convex as a subset of ℍ3 if and only if it is convex as a subset of ℝ3.
Let ∂∞ℍ3 denote the ideal boundary of ℍ3 which, we recall, is defined to be the space of equivalence classes of complete geodesic rays in ℍ3, where two such rays are deemed equivalent whenever they are asymptotic to one another (see [2]). In the Beltrami–Klein model, equivalence classes are uniquely defined by their end points, so that ∂∞ℍ3 identifies topologically with the unit sphere \(\Bbb {S}^2_1\), and the union ℍ3 ∪ ∂∞ℍ3 likewise identifies topologically with the closed unit ball \(\overline {\Bbb {B}}^3_1\).
Let PSO0(3, 1) denote the group of orientation preserving isometries of ℍ3. Recall that its action extends uniquely to a continuous action on ℍ3 ∪ ∂∞ℍ3.
Definition 3.1.1
Let S be a compact, oriented surface of genus at least 2, let Π denote its fundamental group and let θ : Π →PSO0(3, 1) be an injective homomorphism with discrete image. We say that θ is a quasi-Fuchsian representation whenever it preserves a Jordan curve in ∂∞ℍ3. We say that a hyperbolic manifold X is quasi-Fuchsian whenever it is isometric to the quotient of ℍ3 by the image of some quasi-Fuchsian representation.
Remark 3.1.2
The quasi-Fuchsian manifold X is a complete hyperbolic manifold diffeomorphic to S ×ℝ (see [5] and [31]).
Remark 3.1.3
The Jordan curve C preserved by θ( Π) coincides with the limit set of the θ( Π)-orbit of every point of ℍ3 ∪ ∂∞ℍ3. In particular, C is uniquely defined by this representation.
Quasi-Fuchsian manifolds are geometrically finite. In fact, they are the archetypical examples of this class of manifold. Of their various interesting properties, two will concern us in particular. The first is a certain natural decomposition, which is constructed as follows. Let θ : Π →PSO0(3, 1) be a quasi-Fuchsian representation, let C ⊆ ∂∞ℍ3 denote the unique Jordan curve that it preserves, and let X := ℍ3∕θ( Π) denote the quasi-Fuchsian manifold that it defines. Let \(\tilde {K}\) denote the convex hull of C in ℍ3 and let \(\tilde {\Omega }_1\) and \(\tilde {\Omega }_2\) denote the two connected components of its complement. Since θ( Π) preserves \(\tilde {K}\), \(\tilde {\Omega }_1\) and \(\tilde {\Omega }_2\), their respective quotients K, Ω1 and Ω2 identify with subsets of X, and we thus obtain the decomposition
Furthermore, K is the minimal, closed, convex subset onto which X retracts (see [5]). More generally (see [15]), every geometrically finite hyperbolic manifold decomposes in this way as the union of such a minimal, closed, convex subset, known as its Nielsen kernel, and finitely many unbounded open subsets, of varying topological type, known as its ends.
Definition 3.1.4
A height function over a hyperbolic manifold Y is defined to be a locally strictly convex, \(C^{1,1}_{\mathrm {loc}}\) function h : Y →]0, ∞[ such that
-
(1)
the gradient flow lines of h are unit speed geodesics; and
-
(2)
for all t > 0, h−1([t, ∞[) is complete.
We say that a hyperbolic manifold X is a hyperbolic end whenever it carries a height function.
Remark 3.1.5
Height functions, whenever they exist, are unique (see Lemma 3.3.5).
Remark 3.1.6
We are not aware of a similar definition of hyperbolic ends having been used before in the literature. However, we will show in Sect. 3.3 that Definition 3.1.4 yields a rich and coherent theory. We believe that it has the virtues over earlier definitions of being more direct and of lending itself better to potential generalisations.
Consider now the quasi-Fuchsian manifold X and its three components introduced above. By standard properties of convex subsets of hyperbolic space (see [2]), the open sets \(\tilde {\Omega }_1\) and \(\tilde {\Omega }_2\) are both hyperbolic ends with height functions given by distance in ℍ3 to \(\tilde {K}\). Since the above construction is invariant under the action of θ( Π), the quotients Ω1 and Ω2 are also hyperbolic ends. More generally, the connected components of the complement of the Nielsen kernel of any geometrically finite hyperbolic manifold are hyperbolic ends so that the theory of hyperbolic ends encompasses the large scale geometry of geometrically finite hyperbolic manifolds.
The second property of quasi-Fuchsian manifolds that interests us concerns their asymptotic geometry. Indeed, with X as above, we define its ideal boundary∂∞X to be the space of equivalence classes of complete geodesic rays in X which are not contained in any compact set where, again, two such rays are deemed equivalent whenever they are asymptotic to one another. The lifts of such rays are complete geodesic rays in ℍ3 whose end points are not elements of C, so that ∂∞X identifies with the quotient of ∂∞ℍ3 ∖ C under the action of θ( Π).
We now recall that ∂∞ℍ3 naturally identifies with the Riemann sphere \(\hat {\Bbb {C}}\) and that the action of PSO0(3, 1) on ∂∞ℍ3 identifies with the action of the Möbius group PSL(2, ℂ) on this space. This identification is immediately visible in the Beltrami–Klein model, since here the natural holomorphic structure of ∂∞ℍ3 is none other than the structure that it inherits as a smooth, embedded submanifold of ℝ3.
Definition 3.1.7
Let S be a surface. A Möbius structure (also known as a flat conformal structure or a complex projective structure) over S is an atlas \(\mathcal {A}\) of S in \(\hat {\Bbb {C}}\) all of whose transition maps are restrictions of Möbius maps. A Möbius surface is a pair \((S,\mathcal {A})\) where S is a surface and \(\mathcal {A}\) is a Möbius structure over S. In what follows, when no ambiguity arises, we will denote the Möbius surface simply by S.
For each i, we denote \(\tilde {\Sigma }_i:=\partial _\infty \tilde {\Omega }_i\), so that the complement of C in ∂∞ℍ3 decomposes as
For each i, \(\tilde {\Sigma }_i\) is trivially a Möbius surface and, since θ( Π) acts on \(\tilde {\Sigma }_i\) by Möbius transformations, the quotient surface
is also a Möbius surface. In this manner, we obtain a decomposition
of the ideal boundary of X into the union of two Möbius surfaces, each homeomorphic to S. More generally, the ideal boundary of any geometrically finite hyperbolic manifold consists of the union of finitely many compact Möbius surfaces, one for each end, so that the theory of Möbius surfaces encompasses the asymptotic geometry of geometrically finite hyperbolic manifolds.
We underline, however, that these theories extend beyond the theory of geometrically finite hyperbolic manifolds. Indeed, it is straightforward to construct hyperbolic ends and Möbius surfaces which do not arise respectively as the ends or ideal boundaries of such manifolds. Nevertheless, in Sects. 3.3.4 and 3.3.6, we show that every hyperbolic end X still has a well-defined ideal boundary, denoted by ∂∞X, given by the space of equivalence classes of complete geodesic rays in X, and that this ideal boundary naturally carries the structure of a Möbius surface. Conversely, in Sects. 3.3.5 and 3.3.6, we show that, for every Möbius surface S, there exists a canonical hyperbolic end, which we denote by \({\mathcal {H}}S\), and which we call its extension, whose ideal boundary is canonically isomorphic to S.Footnote 1 It follows that the theories of hyperbolic ends and Möbius structures are naturally developed in tandem. However, in contrast to the presentation of this introduction, we find that the theory of Möbius structures precedes that of hyperbolic ends, and for this reason it will be studied first in the following sections.
In Sects. 3.2 and 3.3, we comprehensively review the foundations of these theories and the relationships between them. We have chosen to derive our results using only classical tools of hyperbolic geometry, such as geodesics, spheres, horospheres, and so on. The reader will notice certain similarities with aspects of the work [16] of Kulkarni. Nonetheless, we find that our approach yields simpler proofs of existing results and useful generalisations of others.
Two main themes will be of particular interest to us. The first concerns the construction and properties of certain special functions which encode global geometry in a local manner. In the case of hyperbolic ends, this function will be none other than the height function defined above, whose analytic properties we will establish in some detail. In the case of Möbius surfaces, it will be a \(C^{1,1}_{\mathrm {loc}}\) section of the density bundle of the surface which we call the Kulkarni–Pinkall form. This form, first studied in [17], is naturally related to the horospherical support function of immersed surfaces in ℍ3 (see [8] and [22]) and for this reason constitutes a key ingredient of useful a priori estimates that we will develop in Sect. 3.4 and which we will discuss presently.
The second main theme that interests us is the construction of the operators ∂∞ and \({\mathcal {H}}\) mentioned above. These operators allow us to pass back and forth between the families of hyperbolic ends and Möbius surfaces. In particular, they allow us to compare the geometries of different hyperbolic ends with the same ideal boundaries, and we thereby obtain the following nice result. We say that a hyperbolic end X is maximal if it cannot be isometrically embedded in a strictly larger hyperbolic end with the same ideal boundary.
Theorem 3.1.8 (Maximality)
For every Möbius surface S, the extension \({\mathcal {H}}S\) of S is, up to isometry, the unique maximal hyperbolic end with ideal boundary S.
Remark 3.1.9
To form a clearer idea of the concept of maximality, consider two half-spaces H1, H2 ⊆ℍ3 such that H2 is strictly contained in H1. Although H1 and H2 are both maximal hyperbolic ends, this does not invalidate the definition, since the ideal boundary of the second is strictly contained in that of the first.
Remark 3.1.10
We prove Theorem 3.1.8 in Sect. 3.3.6. In the case where S is compact, this result follows from the work [21] of Scannell via the natural duality between hyperbolic ends and GHMC de Sitter spacetimes (see [9]). An independent proof of the compact case was also provided by the author in [24].
3.1.2 Infinitesimal Strict Convexity, Quasicompleteness and the Asymptotic Plateau Problem
We now discuss the applications of the theories of Möbius surfaces and hyperbolic ends to the study of certain types of immersed surfaces in ℍ3.
Definition 3.1.11
An immersed surface in ℍ3 is a pair (S, e), where S is an oriented surface and e : S →ℍ3 is a smooth immersion. In what follows, we denote the immersed surface sometimes by S and sometimes by e, depending on which is more appropriate to the context.
We first recall some standard definitions of surface theory (c.f. [6]). Let S be an immersed surface. Let Uℍ3 denote the bundle of unit vectors over ℍ3. Let Ne : S →Uℍ3 denote the positively oriented unit normal vector field over e. The first, second and third fundamental forms of e are respectively the symmetric bilinear forms Ie, IIe and IIIe defined over S such that, for every pair ξ, ν of vector fields over this surface,
where ∇ here denotes the Levi–Civita covariant derivative of ℍ3. The shape operator of S is the field Ae of endomorphisms of TS defined such that
In particular, the shape operator is symmetric with respect to Ie and the third fundamental form of S is expressed in terms of the first fundamental form and the shape operator by
Finally, the extrinsic curvature of S is defined by
We now restrict attention to a class of immersed surfaces to which the theories of Möbius surfaces and hyperbolic ends naturally apply.
Definition 3.1.12
Let (S, e) be an immersed surface in ℍ3. We say that (S, e) is quasicomplete whenever the metric Ie + IIIe is complete and we say that it is infinitesimally strictly convex (ISC) whenever its second fundamental form is everywhere positive-definite.
Let (S, e) be a quasicomplete, ISC immersed surface in ℍ3. We associate a natural hyperbolic end to S as follows. First, we denote \({\mathcal {E}}S:=S\times [0,\infty [\) and we define the function \({\mathcal {E}} e:{\mathcal {E}}S\rightarrow \Bbb {H}^3\) by
By local strict convexity of S, \({\mathcal {E}} e\) is an immersion, and we thus furnish the manifold \({\mathcal {E}}S\) with the unique hyperbolic structure that makes it into a local isometry. Quasicompleteness then implies that \({\mathcal {E}}S\) is, in fact, a hyperbolic end (see Lemma and Definition 3.4.1), which we call the end of S. In fact, a converse also holds: \({\mathcal {E}}S\) is a hyperbolic end if and only if S is quasicomplete and IIe is non-negative semi-definite.
In order to describe the natural Möbius structure associated to S, we now recall the concept of developing maps. Let S be a surface and let \(\phi :S\rightarrow \hat {\Bbb {C}}\) be a local diffeomorphism. For every point x of S, there exists a neighbourhood U of x over which ϕ restricts to a diffeomorphism onto its image V . The set \(\mathcal {A}:=(U_\alpha ,V_\alpha ,\phi )_{\alpha \in A}\) forms an atlas of S in \(\hat {\Bbb {C}}\) whose transition maps are trivial, and thus a fortiori Möbius. We call \(\mathcal {A}\) the pull-back Möbius structure of ϕ. Given any Möbius surface S, we say that a local diffeomorphism \(\phi :S\rightarrow \hat {\Bbb {C}}\) is a developing map of S whenever its pull-back Möbius structure is compatible with the initial Möbius structure of the surface. Not every Möbius surface possesses a developing map, although every simply-connected Möbius surface trivially does. We say that a Möbius surface is developable whenever a developing map exists. Likewise, we define a developed Möbius surface to be a pair (S, ϕ), where S is a surface and \(\phi :S\rightarrow \hat {\Bbb {C}}\) is a local diffeomorphism. Naturally, in this case, S is furnished with the pull-back Möbius structure of ϕ.
We now return to the case where (S, e) is a quasicomplete ISC immersed surface in ℍ3. We define the horizon map Hor : Uℍ3 → ∂∞ℍ3 such that, for every unit speed geodesic γ : ℝ →ℍ3,
We define asymptotic Gauss map of S by
where Ne here denotes the positively oriented unit normal of e. By infinitesimal strict convexity of S, this function is a local diffeomorphism from S into ∂∞ℍ3 (see [2]).Footnote 2 In particular, (S, ϕe) is a developed Möbius surface which we call the asymptotic Gauss image of S.
We have thus seen how hyperbolic ends and Möbius surfaces are associated to quasicomplete, ISC immersed surfaces in ℍ3. We now show how these constructions yield a useful new a priori estimate for such surfaces. We first require the following parametrisation of the space of open horoballs in ℍ3 by Λ2∂∞ℍ3. Let y ∈ ∂∞ℍ3 be an ideal point. Let B ⊆ℍ3 be an open horoball centred on y. Let H be an open half-space whose boundary is an exterior tangent to B at some point. Let D := ∂∞H denote the ideal boundary of H and let ω(D) denote the area form of its Poincaré metric. It turns out that ω(D)(y) only depends on B. We call y and ωy := ω(D)(y) the asymptotic centre and the asymptotic curvature of B respectively, and we verify that these data define B uniquely. For all ωy ∈ Λ2∂∞ℍ3, we henceforth denote by B(ωy) the open horoball in ℍ3 with asymptotic centre y and asymptotic curvature ωy. In this manner, we obtain the desired parametrisation of the space of open horoballs in ℍ3 by Λ2∂∞ℍ3.
In Sect. 3.2.4, we associate to every Möbius surface S a canonical section of Λ2S which we call its Kulkarni–Pinkall form. The push-forward of this section through any developing map is a function taking values in Λ2∂∞ℍ3 which, by the preceding discussion, associates to every point of S an open horoball in ℍ3.
Theorem 3.1.13 (A Priori Estimate)
Let (S, e) be a quasicomplete ISC immersed surface in ℍ3, let ϕ denote its asymptotic Gauss map and let ω denote the Kulkarni–Pinkall form of the developed Möbius surface (S, ϕ). For all x ∈ S,
Remark 3.1.14
Theorem 3.1.13 follows immediately from Theorem 3.4.8.
This estimate in turn yields a complete solution to a problem of Plateau-type concerning surfaces of constant extrinsic curvature, as we now show. First, following the work [19] of Labourie, we make the following two definitions.
Definition 3.1.15
For k > 0, a k-surface is a quasicomplete, ISC immersed surface in ℍ3 of constant extrinsic curvature equal to k. In what follows, we denote the k-surface sometimes by S and sometimes by e, depending on which is more appropriate to the context.
Definition 3.1.16
Let (S, ϕ) be a developed Möbius surface. For k > 0, we say that a k-surface e : S →ℍ3 is a solution to the asymptotic Plateau problem (S, ϕ) whenever its asymptotic Gauss image is equal to this Möbius surface.
In other words, Labourie’s asymptotic Plateau problem concerns the unique prescription of k-surfaces in terms of their asymptotic Gauss images. In [19], Labourie proved various existence and uniqueness results for solutions of this problem in a more general setting than that studied here. Further existence and continuity results were also obtained by the author in [26]. There is now, scattered across the literature, a rich theory around the asymptotic Plateau problem, which we will review in [28].
In Sect. 3.4, we apply the theories of Möbius surfaces and hyperbolic ends to the study of this problem. In particular, using the a priori estimate of Theorem 3.1.13, we obtain the following new compactness result. First, we say that two developed Möbius surfaces (S, ϕ) and (S′, ϕ′) are equivalent whenever there exists a diffeomorphism α : S → S′ and a Möbius map β ∈PSL(2, ℂ) such that
Theorem 3.1.17 (Monotone Convergence)
Let (S, ϕ) be a developed Möbius surface with universal cover not equivalent to\((\hat {\Bbb {C}},z)\), (ℂ, z) or (ℂ, Exp(z)). Let ( Ωm)m ∈ℕbe a nested sequence of open subsets of S which exhausts S. If, for k > 0 and for all m, em : Ωm →ℍ3is a k-surface solving the asymptotic Plateau problem\((\Omega _m,\phi |{ }_{\Omega _m})\), then (em)m ∈ℕsubconverges in the\(C^\infty _{\mathrm {loc}}\)sense over S to a k-surface e∞ : S →ℍ3solving the asymptotic Plateau problem (S, ϕ).
Remark 3.1.18
Theorem 3.1.17 is proven in Theorem 3.4.11.
Upon combining Theorem 3.1.17 with the existence results proven by Labourie in [19], we obtain the main new result of this chapter: a complete solution of the asymptotic Plateau problem for k-surfaces in three-dimensional hyperbolic space.
Theorem 3.1.19 (Existence and Uniqueness)
For all 0 < k < 1, and for every developed Möbius surface (S, ϕ) with universal cover not equivalent to\((\hat {\Bbb {C}},z)\), (ℂ, z) or (ℂ, Exp(z)), there exists a unique k-surface e : S →ℍ3solving the asymptotic Plateau problem (S, ϕ).
Remark 3.1.20
Theorem 3.1.19 is proven in Theorem 3.4.16.
Remark 3.1.21
It is an interesting open problem to determine under what conditions a k-surface is complete. We describe an example of a non-complete k-surface in Appendix A.
3.1.3 Schwarzian Derivatives
We conclude this introduction by showing how a reformulation of Theorem 3.1.19 in terms of Schwarzian derivatives yields nice linearisations of the spaces of k-surfaces in ℍ3.
Let S be a simply-connected Riemann surface. By Riemann’s uniformisation theorem, we may suppose that S is the Poincaré disk 𝔻, the complex plane ℂ or the Riemann sphere \(\hat {\Bbb {C}}\). For all k, let \({\mathrm {I}\widetilde {\mathrm {mm}}}_k(S)\) denote the space of k-surfaces e : S →ℍ3 whose asymptotic Gauss map is holomorphic. We furnish this space with the \(C^\infty _{\mathrm {loc}}\) topology and we denote by Immk(S) its quotient under the action of post-composition by elements of PSO0(3, 1). Trivially, every simply connected k-surface is equivalent to a unique element of
The space \({\mathrm {Imm}}_k(\hat {\Bbb {C}})\) will be of little interest to us since, for k > 1, it consists of a single equivalence class corresponding to geodesic spheres of radius \({\mathrm {arctanh}}(1/\sqrt {k})\) whilst, for \(k\leqslant 1\), it is empty.
We now show how Immk(𝔻) and Immk(ℂ) are parametrised by open subsets of vector spaces. We first recall the concept of Schwarzian derivative (see [20]). Recall that a function \(\phi :S\rightarrow \hat {\Bbb {C}}\) is said to be locally conformal whenever it is a holomorphic local diffeomorphism. The Schwarzian derivative of any such function \(\phi :S\rightarrow \hat {\Bbb {C}}\) is defined by
A key property of the Schwarzian derivative is that, for any locally conformal function \(\phi :S\rightarrow \hat {\Bbb {C}}\) and for any Möbius map α,
Furthermore, for any holomorphic function f : S →ℂ, there exists a locally conformal function \(\phi :S\rightarrow \hat {\Bbb {C}}\), unique up to post-composition by Möbius maps, such that
Let Hol(S) denote the space of holomorphic functions over S furnished with the \(C^0_{\mathrm {loc}}\) topology. For all k > 0, let \(\tilde {\Sigma }: \mathrm {I}\widetilde {\mathrm {mm}}_k(S)\rightarrow {\mathrm {Hol}}(S)\) denote the function defined such that, for every k-surface e : S →ℍ3,
where ϕe denotes the asymptotic Gauss map of e. For any k-surface \(e\in {\mathrm {I}\widetilde {\mathrm {mm}}}_k(S)\) and for any Möbius map α,
so that, for all k, \(\tilde {\Sigma }\) descends to a continuous functional Σ : Immk(S) →Hol(S).
In [26], we prove an existence and uniqueness result for solutions of asymptotic Plateau problems of hyperbolic conformal type. In the present framework, this is reformulated as follows.
Theorem 3.1.22 (Hyperbolic Asymptotic Plateau Problem)
For all 0 < k < 1 and for all f ∈Hol(𝔻), there exists a unique element e ∈Immk(𝔻) such that
Furthermore, e depends continuously on f. In other words, Σ defines a homeomorphism from Hol(𝔻) into Immk(𝔻).
Remark 3.1.23
Theorem 3.1.22 is proven in Theorem 3.4.18, below.
Theorem 3.1.19 now yields the corresponding result in the parabolic case.
Theorem 3.1.24 (Parabolic Asymptotic Plateau Problem)
For all 0 < k < 1 and for all f ∈Hol(ℂ) ∖ℂ, there exists a unique element e ∈Immk(ℂ) such that
Remark 3.1.25
Theorem 3.1.24 is proven in Theorem 3.4.19, below.
Remark 3.1.26
It is not known in the parabolic case whether the solution e depends continuously on the data f.
Remark 3.1.27
Interestingly, a complementary result holds in the limiting case where k = 1. Indeed, by a theorem of Volkov–Vladimirova and Sasaki (see Theorem 46 of [29]), Imm1(𝔻) is empty and Imm1(ℂ) consists only of horospheres and universal covers of cylinders of constant radius about complete geodesics.Footnote 3 When e is a horosphere, Σ[e] vanishes and when e is a universal cover of a cylinder, Σ[e] is a non-zero constant. For this and other reasons, for 0 < k < 1, it makes sense to identify complete geodesics and ideal points of ∂∞ℍ3 as degenerate solutions of the asymptotic Plateau problem for \(f\in \Bbb {C}\setminus \left \{0\right \}\) and f = 0 respectively.
Remark 3.1.28
For k > 1, we expect both Immk(𝔻) and Immk(ℂ) to be empty. However, we are not aware of any proof of this affirmation.
3.1.4 Closing Remarks and Acknowledgements
Much of this chapter has been formulated in the language of category theory, which we believe provides the best framework for presenting our results. For the benefit of those who, like the author, have always met this theory with a certain foreboding, we have provided an elementary discussion of its basic principles in Appendix B.
The author is grateful to Sébastien Alvarez, François Fillastre and Andrea Seppi for helpful comments on earlier drafts of this text. Figure 3.5 was prepared by Débora Mondaini.
3.2 Möbius Structures
3.2.1 Möbius Structures
A Möbius structure (also known as a flat conformal structure or a complex projective structure) over a surface S is an atlas \(\mathcal {A}\) all of whose transition maps are restrictions of Möbius maps. A Möbius surface is a pair \((S,\mathcal {A})\) where S is a surface and \(\mathcal {A}\) is a Möbius structure over this surface. In what follows, we will denote the Möbius surface simply by S whenever the atlas is clear from the context. The family of Möbius surfaces forms a category whose morphisms are those functions ϕ : X → X′ whose expressions with respect to every pair of coordinate charts are restrictions of Möbius maps. Naturally, we identify Möbius surfaces which are isomorphic.
Every Möbius structure trivially defines a holomorphic structure over the same surface. We call the resulting Riemann surface the underlying Riemann surface of the Möbius surface. The operation which associates to a Möbius surface its underlying Riemann surface is trivially a covariant functor. This distinction between Möbius surfaces and their underlying Riemann surfaces is more than a mere abstract formality, and the reader may consult, for example, [7] for an overview of the rich theory concerning the relationship between the two.
The model examples of Möbius surfaces are the open subsets of \(\hat {\Bbb {C}}\) and their quotients under actions of subgroups of the Möbius group PSL(2, ℂ). More generally, given any surface S, and a local diffeomorphism \(\phi :S\rightarrow \hat {\Bbb {C}}\), a Möbius structure is constructed over S as follows. For every point x ∈ S, there exists a neighbourhood U of x over which ϕ restricts to a diffeomorphism onto its image V . The set (Uα, Vα, ϕ)α ∈ A of all such charts defines an atlas of S in \(\hat {\Bbb {C}}\) whose transition maps are trivial, and thus a fortiori Möbius. We call this structure the pull-back structure of ϕ and we denote it by \(\phi ^*\hat {\Bbb {C}}\). It will often be convenient in the sequel to denote the Möbius surface defined by ϕ by (S, ϕ).
Given a Möbius surface S, we say that a local diffeomorphism \(\phi :S\rightarrow \hat {\Bbb {C}}\) is a developing map of S whenever the pull-back Möbius structure of ϕ is compatible with the initial Möbius structure of S. Any two developing maps \(\phi ,\phi ':S\rightarrow \hat {\Bbb {C}}\) are related to one another by
for some Möbius map α, so that the family of all developing maps over a given Möbius surface can be parametrised by PSL(2, ℂ) whenever it is non-empty. We say that a Möbius surface is developable whenever it has a developing map. In particular, every simply connected Möbius surface has this property. In the following sections, we will mainly be concerned with developable Möbius surfaces. In particular, we will take the developing maps to be given, and we leave the reader to verify that our constructions are independent of the developing maps chosen.
Non-developable Möbius surfaces are studied as follows. Given a Möbius surface S with fundamental group Π and universal cover \(\tilde {S}\), any developing map ϕ of \(\tilde {S}\) is equivariant with respect to a unique homomorphism θ : Π →PSL(2, ℂ) which we call its holonomy. Furthermore, given another developing map ϕ′ with holonomy θ′, there exists a unique Möbius map α such that
Although non-developable Möbius surfaces will be of little interest to us in the sequel, their study has produced a deep and fascinating literature. For example, the question of which homomorphisms arise as holonomies of Möbius surfaces is addressed thoroughly by Gallo–Kapovich–Marden in [10]. Likewise, the structure of the space of Möbius surfaces with a given fixed holonomy θ is studied by Goldman in [11]. Finally, branched Möbius structures, for which the developing map is allowed to be a ramified covering, add yet another layer of sophistication to this theory (see, for example, [4]).
We conclude this section by describing a key trichotomy of the theory. We say that a connected Möbius surface is elliptic or parabolic whenever its universal cover is isomorphic to \((\hat {\Bbb {C}},z)\) or to (ℂ, z) respectively and hyperbolic otherwise.
Lemma 3.2.1
Let S be a connected Möbius surface. If S contains an elliptic surface, then S is elliptic. If S contains a parabolic surface, then S is either elliptic or parabolic.
Proof
Upon taking universal covers, we may suppose that S is simply connected. Let S′ be an open subset of S. If S′ is elliptic then, being compact, it is closed so that, by connectedness, S = S′ is also elliptic. Suppose now that S′ is parabolic. Let \(\phi :S\rightarrow \hat {\Bbb {C}}\) be a developing map such that ϕ(S′) = ℂ. We claim that S′ is also simply connected. Indeed, let \(\tilde {S}'\) denote its universal cover and let \(\pi :\tilde {S}'\rightarrow S'\) denote the canonical projection. Since (ϕ ∘ π) is a developing map of \(\tilde {S}'\), it is a diffeomorphism from \(\tilde {S}'\) onto ℂ. It follows that π is injective and S′ is therefore simply connected, as asserted. In particular, ϕ restricts to a diffeomorphism from S′ onto ℂ.
Suppose now that S′≠ S. In particular, the topological boundary ∂S′ of S′ in S is non-empty. Since the restriction of ϕ to S′ is a diffeomorphism, \(\phi (\partial S')=\left \{\infty \right \}\). Now let x be a point of ∂S′. Let Ω be a connected neighbourhood of x in S over which ϕ restricts to a diffeomorphism. In particular, by injectivity, \(\partial S'\cap \Omega =\left \{x\right \}\). It follows that \(S'\cap (\Omega \setminus \left \{x\right \})\) is a non-trivial, open and closed subset of \(\Omega \setminus \left \{x\right \}\) so that, by connectedness, \(\Omega \setminus \left \{x\right \}\subseteq S'\). Since ϕ(S ∖ Ω) is uniformly bounded away from ∞, x is in fact the only element of ∂S′. We conclude that ϕ defines a diffeomorphism from S onto \(\hat {\Bbb {C}}\), so that S is elliptic. This completes the proof. □
We underline that the above trichotomy for Möbius surfaces differs from the elliptic-parabolic-hyperbolic trichotomy for Riemann surfaces. Indeed, although the underlying Riemann surface of any elliptic or parabolic Möbius surface is also respectively elliptic and parabolic, there exist many hyperbolic Möbius surfaces—such as, for example, (ℂ∗, z), (ℂ, ez) and (ℂ∗, ez)—whose underlying Riemann surfaces are parabolic.
3.2.2 The Möbius Disk Decomposition and the Join Relation
We now introduce a canonical decomposition of Möbius surfaces which will be the main tool used for their study in the sequel. Let S be a developable Möbius surface with developing map ϕ. A Möbius disk in S is a pair (D, α) where \(D\subseteq \hat {\Bbb {C}}\) is an open disk and α : D → S satisfies
We call the set (Di, αi)i ∈ I of all Möbius disks in S its Möbius disk decomposition. Since ϕ is a local diffeomorphism, every point of S lies in the image of some Möbius disk, so that the Möbius disk decomposition covers S. We define the join relation ∼ of the Möbius disk decomposition such that, for all i, j ∈ I,
This relation is trivially reflexive and symmetric, but not transitive. Composing with ϕ, we obtain
and
We call the pair ((Di)i ∈ I, ∼) the combinatorial data of S. This data is sufficient to recover S uniquely up to isomorphism, as follows from the following general result.
Theorem & Definition 3.2.2
Let M be a smooth manifold. Let ( Ωi)i ∈ Ibe a family of open subsets of M and let ∼ be a reflexive and symmetric relation over I such that
-
(1)
for all i, j ∈ I, Ωi ∩ Ωjhas at most 1 connected component;
-
(2)
i ∼ j ⇒ Ωi ∩ Ωj ≠ ∅; and
-
(3)
i ∼ j, j ∼ k, Ωi ∩ Ωj ∩ Ωk ≠ ∅ ⇒ i ∼ k.
There exists a (not necessarily second-countable) smooth manifold N, a smooth local diffeomorphism ϕ : N → M and, for all i, a smooth function αi : Ωi → Nsuch that,
-
(A)
(αi( Ωi))i ∈ Icovers N;
-
(B)
i ∼ j ⇔ αi(Di) ∩ αj(Dj) ≠ ∅; and
-
(C)
for alli, ϕ ∘ αi = Id.
Furthermore, the triplet (N, ϕ, (αi)i ∈ I) is unique in the sense that if\((N',\phi ',(\alpha _i^{\prime })_{i\in I})\)is another such triplet, then there exists a unique diffeomorphism ψ : N → N′such that, for all i, \(\alpha _i^{\prime } = \psi \circ \alpha _i\).
We call N the joinof (( Ωi)i ∈ I, ∼), we call ϕ thecanonical immersionand we call (αi)i ∈ Ithe canonical parametrisations.
Remark 3.2.3
If M possesses any additional structure—such as, say, a hyperbolic structure, a Möbius structure, and so on—then N inherits this structure from M, as follows immediately from the triviality of the transition maps of the atlas constructed in the proof below.
Remark 3.2.4
We do not prove second-countability of N. This will not trouble us, however, since second-countability is only required in manifold theory for constructions involving either Sard’s Theorem or partitions of unity, neither of which appear in this chapter. Besides, in every case arising in the sequel, second-countability can be recovered, either by covering N by a countable subfamily of (αi( Ωi))i ∈ I, or by appealing to Radó’s Theorem (see [14]).
Proof
We first prove existence. Define
and define the relation ≈ over \(\tilde {N}\) such that, for all xi ∈ Ωi and yj ∈ Ωj,
It follows by (3) that ≈ is an equivalence relation over \(\tilde {N}\). Let \(N:=\tilde {N}/\approx \) denote its quotient space furnished with the quotient topology and let \(\alpha :\tilde {N}\rightarrow N\) denote the canonical projection. Recall now that a manifold is defined to be a second-countable, Hausdorff space furnished with an atlas. The atlas of N is constructed as follows. For all i, we verify that α restricts to a homeomorphism from Ωi onto an open subset of N, and we denote
The family \(\mathcal {A}:=(U_i,V_i,\phi _i)_{i\in I}\) forms an atlas of N all of whose transition maps are trivial, and thus a fortiori smooth, as desired.
Since we are not concerned with second-countability, it only remains to show that N is Hausdorff. For this, let xi ∈ Ωi and yj ∈ Ωj be such that there exists a sequence (pm)m ∈ℕ of points in N converging simultaneously to α(xi) and to α(yj). For sufficiently large m, pm has representative elements xm,i in Ωi and ym,j in Ωj respectively, which converge towards xi and yj respectively. In particular, i ∼ j and, for all m, xm,i = ym,j. Upon taking limits, we obtain xi = yj, so that xi ≈ yj and therefore α(xi) = α(yj). We conclude that N is indeed Hausdorff, and therefore a (not necessarily second-countable) manifold.
Finally, the canonical inclusion \(\tilde {\phi }:\tilde {N}\rightarrow M\) trivially descends to a local diffeomorphism ϕ : N → M. We verify that (N, ϕ, (αi)i ∈ I) has the desired properties, thus proving existence.
To prove uniqueness, let \((N',\phi ',(\alpha _i^{\prime })_{i\in I})\) be another such triplet. Define \(\tilde {\psi }:\tilde {N}\rightarrow N'\) such that, for all xi ∈ Ωi,
We first show that \(\tilde {\psi }\) descends to a function ψ : N → N′. Indeed, let xi ∈ Ωi and yj ∈ Ωj be such that xi ≈ yj. By (B),
Furthermore, by (1), (C) and a connectedness argument
In particular, \(\tilde {\psi }(x_i)=\tilde {\psi }(y_j)\) so that \(\tilde {\psi }\) indeed descends to a function ψ : N → N′. By (A), ψ is surjective, by (B) and (C), it is injective. Since αi and \(\alpha _i^{\prime }\) are local diffeomorphisms for all i, it follows that ψ is a diffeomorphism, definition, for all i, \(\alpha _{i^{\prime }} = \psi \circ \alpha _i\). This proves existence of ψ, and since uniqueness is trivial, this completes the proof. □
3.2.3 Geodesic Arcs and Convexity
We now introduce a concept of geodesics for sets of Möbius disks in a given non-elliptic Möbius surface. This in turn yields a concept of convexity for such sets which will be useful for establishing uniqueness in the constructions that follow.
To begin with, we study the geometry of the space \(\mathcal {D}\) of disks in \(\hat {\Bbb {C}}\). Recall that \(\hat {\Bbb {C}}\) naturally identifies with the ideal boundary ∂∞ℍ3 of ℍ3. With this identification, every disk D in \(\hat {\Bbb {C}}\) is the ideal boundary of a unique open half-space H in ℍ3. The boundary ∂H of every open half-space in ℍ3 is a totally geodesic plane which we orient so that its positively oriented normal points outwards from H. Trivially, open half-spaces in ℍ3 are uniquely defined by their oriented boundaries. Consequently, any parametrisation of the space of oriented totally geodesic planes in ℍ3 is also a parametrisation of \(\mathcal {D}\).
The space of oriented totally geodesic planes in ℍ3 is parametrised by (2, 1)-dimensional de Sitter space dS2, 1 as follows. First, we identify ℍ3 and dS2, 1 with subsets of ℝ3, 1, namely
where here 〈⋅, ⋅〉3,1 denotes the Minkowski metric with signature (3, 1), that is
With this identification, every oriented totally geodesic plane P in ℍ3 is the intersection of ℍ3 with a unique oriented, time-like, linear hyperplane \(\hat {P}\) in ℝ3, 1. Every such hyperplane has, in turn, a well-defined positively-oriented unit normal vector N. Since N is also spacelike, it is an element of dS2, 1. This yields a bijection between the space of oriented, totally geodesic planes in ℍ3 and dS2, 1, which is the desired parametrisation.
Recall now that a subset Γ of dS2, 1 is a geodesic if and only if it is the intersection of dS2, 1 with a linear plane \(\hat {\Gamma }\). Furthermore, Γ is said to be spacelike, lightlike or timelike respectively whenever the restriction to this plane of the Minkowski metric has signature (2, 0), (1, 0) or (1, 1). Of particular interest to us will be the spacelike geodesics. Observe first that any two distinct totally geodesic planes in ℍ3 with non-trivial intersection meet along a complete geodesic.
Lemma 3.2.5
Let P and P′ be distinct, oriented totally-geodesic planes in ℍ3which are neither equal nor equal with opposing orientations. P and P′ have non-trivial intersection if and only if their corresponding points in dS2, 1lie along a common spacelike geodesic Γ. Furthermore, motion at constant speed along Γ corresponds to rotation at constant angular speed around their common geodesic G.
Proof
Observe first that the orthogonal complement in ℝ3, 1 of any timelike linear plane \(\hat {G}\) is a spacelike linear plane \(\hat {\Gamma }\) whose intersection with dS2, 1 is a circle in \(\hat {\Gamma }\) and a spacelike geodesic Γ in dS2, 1. Now let \(P=\hat {P}\cap \Bbb {H}^3\) and \(P'=\hat {P}'\cap \Bbb {H}^3\) be oriented totally-geodesic planes in ℍ3 which are neither equal nor equal with opposing orientations. These planes meet along a common geodesic G if and only if \(\hat {P}\) and \(\hat {P}'\) contain a common timelike linear plane \(\hat {G}\). This in turn holds if and only if their unit normals N and N′, which are already elements of dS2, 1, are also elements of the orthogonal complement \(\hat {\Gamma }\) of \(\hat {G}\). This proves the first assertion. Since the second assertion is straightforward, this completes the proof. □
We now return to the case of disks in \(\hat {\Bbb {C}}\). We say that two distinct disks D0 and D1overlap whenever their boundary circles meet at exactly two points. Observe that this holds if and only if their intersection is non-trivial, the intersection of their complements is non-trivial, and neither is contained within the other. With the preceding parametrisation, this is precisely the requirement for their corresponding points in dS2, 1 to lie along a common spacelike geodesic. In addition, the corresponding point of a third disk D lies along the shorter geodesic arc between these two points if and only if
We thus define the geodesic arc between two overlapping disks D0 and D1 to be the set of all disks D in \(\hat {\Bbb {C}}\) which satisfy this property. This construction is illustrated in Fig. 3.1.

Here the disks D1 and D2 overlap. The disk D is the mid-point of the geodesic arc between these two disks. Two other points along this arc are marked by dashed curves

The image of Ux is a disk in the upper half space, symmetric about the imaginary axis and passing through the points \(( \sqrt {5}+1)i/2\) and \(( \sqrt {5}-1)i/2\). In particular, it is contained in the Euclidean ball of radius \(( \sqrt {5}-1)/2\) about i
This concept of geodesic arc extends to the Möbius disk decomposition of S as follows. We say that two distinct Möbius disks (D0, α0) and (D1, α1) overlap whenever α0(D0) and α1(D1) have non-trivial intersection and neither is contained within the other. Upon composing with ϕ, it follows that D0 and D1 likewise have non-trivial intersection and neither is contained within the other. In addition, since S is not elliptic, the complements of D0 and D1 also have non-trivial intersection, so that D0 and D1 also overlap. Using a connectedness argument, we show that
so that these functions join to define a function α01 : D0 ∪ D1 → S such that
In particular, for any other disk D along the geodesic arc from D0 to D1, (D, α01|D) is also a Möbius disk in S. We thus define the geodesic arc from (D0, α0) to (D1, α1) to be the set of all Möbius disks in S of this form. We say that any subset (Di, αi)i ∈ J of the Möbius disk decomposition of S is convex whenever it contains the geodesic arc between any two of its overlapping disks.
3.2.4 The Kulkarni–Pinkall Form
In [17], Kulkarni–Pinkall construct for any Möbius surface of hyperbolic type a canonical metric which encodes its global geometry in a local manner. Kulkarni–Pinkall’s construction will play a central role in the C0 estimates that we will derive in Sect. 3.4 for quasicomplete ISC immersions in ℍ3. However, we will adopt here a slightly different perspective from that of [17], since we believe it to be more natural to work in terms of 2-forms rather than in terms of metrics.
Let S be a developable Möbius surface with developing map ϕ, let (Di, αi)i ∈ I denote its Möbius disk decomposition and, for all i ∈ I, let Hi denote the open half-space in ℍ3 with ideal boundary Di. For all x ∈ S, let I(x) denote the set of indices i such that x ∈ αi(Di). For any disk \(D\in \hat {\Bbb {C}}\), let ω(D) denote the area form of its Poincaré metric. We define ωϕ, the Kulkarni–Pinkall form of S, such that, for all x ∈ S,
and we define gϕ the Kulkarni–Pinkall metric of S by
where J here denotes the complex structure of S.
Lemma 3.2.6 (Monotonicity)
Let S and S′ be developable Möbius surfaces with respective developing maps ϕ and ϕ′ and respective Kulkarni–Pinkall forms ωϕand\(\omega _{\phi '}\). If α : S → S′ is a morphism such that ϕ = ϕ′∘ α, then
Proof
Indeed, composition with α sends the Möbius disk decomposition of S into the Möbius disk decomposition of S′. □
The following family of partial orders over I will prove useful in deriving properties of the Kulkarni–Pinkall form. For all x ∈ S, we define
where y := ϕ(x). The geometric significance of the Kulkarni–Pinkall form as well as this partial order becomes clear once we recall the parametrisation of the space of open horoballs in ℍ3 by Λ2∂∞ℍ3 described in Sect. 3.1.2. Indeed, for all x ∈ S, ϕ∗ωϕ(x) is simply the infimal asymptotic curvature of horoballs asymptotically centred on ϕ(x) and contained in Hi, as i varies over I(x). Likewise, for all x ∈ S and for all i, j ∈ I(x), i ≥xj if and only if every open horoball asymptotically centred on ϕ(x) and contained in Hj is also contained in Hi.
3.2.5 Analytic Properties of the Kulkarni–Pinkall Form
We restrict our attention initially to the simpler case of Möbius surfaces of the form ( Ω, z), where Ω is an open subset of \(\hat {\Bbb {C}}\). At this stage, it is useful to recall that, for a disk D in the complex plane ℂ of radius R with centre lying at distance r < R from the origin,
In particular, if ω(D)(0) < λ2dxdy, then D contains a disk of radius 1∕λ about the origin.
Lemma & Definition 3.2.7
Let Ω be an open subset of \(\hat {\Bbb {C}}\) and let ω denote its Kulkarni–Pinkall form.
-
(1)
If the complement of Ω in\(\hat {\Bbb {C}}\)contains at most 1 point then, for all x, ω(x) = 0 and I(x) contains no maximal element with respect to ≥x.
-
(2)
If the complement of Ω in\(\hat {\Bbb {C}}\)contains at least 2 distinct points then, for all x, ω(x) > 0 and I(x) contains a unique maximal element with respect to ≥xwhich realizes ω(x).
In the second case, we denote by max(x) the unique maximal element of I(x).
Proof
The first assertion is trivial. To prove the second assertion, we may suppose that Ω is a proper subset of the complex plane ℂ. Existence follows by compactness of the set of (possibly ideal) disks in ℂ which have radius bounded below, which contain a fixed point z0, and which avoid another fixed point w0. Observe now that ω(Di)(x) restricts to a strictly concave function over every geodesic arc in I(x). Uniqueness thus follows by convexity of I(x). Finally, since ω(x) is realized by the unique maximal element of I(x), ω(x) > 0, and this completes the proof. □
Given an ideal point x ∈ ∂∞ℍ3 and a closed subset Y ⊆ℍ3 ∪ ∂∞ℍ3, we define the curvature of distancec(x, Y ) from x to Y to be the infimal asymptotic curvature of open horoballs with asymptotic centre x which do not meet Y .
Lemma 3.2.8
Let Ω be a proper open subset of the complex plane ℂ, let ω denote its Kulkarni–Pinkall form, let (Di, αi)i ∈ Idenote its Möbius disk decomposition, and, for all i ∈ I, let Hidenote the open half-space in ℍ3with ideal boundary Di. Let K denote the convex hull in ℍ3 ∪ ∂∞ℍ3of the complement of Ω and let π : Ω → ∂K denote the closest point projection. For all x ∈ Ω,
and H(x) := Hmax(x)is the unique supporting open half-space of K at the point π(x) such that ∂H(x) is orthogonal to the geodesic joining π(x) to x. In particular, ω(x), H(x) and D(x) := Dmax(x)are\(C^{0,1}_{\mathrm {loc}}\)functions over Ω.
Remark 3.2.9
In fact, Kulkarni–Pinkall show in [17] that ω is a \(C^{1,1}_{\mathrm {loc}}\) function.
Proof
Since the complement of K in ℍ3 is the union of all open half-spaces with ideal boundary in Ω, we have
from which it follows that ω(x) = c(x, K) for all x ∈ Ω. Now choose x ∈ Ω. Let B be the open horoball in ℍ3 with asymptotic centre x and asymptotic curvature c(x, K). Since Hmax(x) is the unique open half-space in Kc containing B, the second assertion follows and this completes the proof. □
We now address the general case. Let S be a developable Möbius surface with developing map ϕ and let (Di, αi)i ∈ I denote its Möbius disk decomposition. For all x ∈ S, with I(x) defined as in Sect. 3.2.4, we define
For all i, j ∈ I(x), αi coincides with αj over Di ∩ Dj so that the join of these functions yields a function αx : Ωx → S satisfying ϕ ∘ αx = Id. We call ( Ωx, αx) the localisation of S at x. The following trichotomy follows immediately from Lemma 3.2.1.
Lemma 3.2.10
Let S be a developable Möbius surface with developing map\(\phi :S\rightarrow \hat {\Bbb {C}}\).
-
(1)
If S is elliptic, then\(\Omega _x=\hat {\Bbb {C}}\)for all x.
-
(2)
If S is parabolic, then Ωxis the complement of a single point in\(\hat {\Bbb {C}}\)for all x.
-
(3)
If S is hyperbolic, then the complement of Ωxcontains at least two points in\(\hat {\Bbb {C}}\)for all x.
For all x ∈ S, we define ωϕ,x, the local Kulkarni–Pinkall form of S at x, to be the push-forward through αx of the Kulkarni–Pinkall form of ( Ωx, z). Since composition with αx sends the Möbius disk decomposition of ( Ωx, z) to I(x), Lemmas 3.2.7 and 3.2.10 immediately yield the following result.
Lemma & Definition 3.2.11
Let S be a developable Möbius surface of hyperbolic type with developing map\(\phi :S\rightarrow \hat {\Bbb {C}}\)and Kulkarni–Pinkall form ωϕ. For all x ∈ S, I(x) has a unique maximal element which realises ωϕ(x). Furthermore
and, for all y ∈ αx( Ωx),
For all x ∈ S, we denote by max(x) the unique maximal element of I(x).
Analytic properties of ωϕ analogous to those obtained in Lemma 3.2.8 for localised Möbius structures follow upon refining (3.2.21) to equality over a neighbourhood of x.
Lemma 3.2.12
Let S be a developable Möbius surface of hyperbolic type with developing map ϕ. For all x ∈ S, there exists a neighbourhood Uxof x such that, for all y ∈ Ux,
Proof
Since S is hyperbolic, we may suppose that Ωx is a proper subset of ℂ. Let (Di, αi)i ∈ I denote the Möbius disk decomposition of S. Denote i := max(x). We may suppose that Di is the upper half-space in ℂ and that \(\phi (x)=\sqrt {-1}\). Let dh denote the hyperbolic distance in Di and define Ux by
Let y be an element of Ux. Observe that ϕ(y) is contained in the Euclidean ball of radius \((\sqrt {5}-1)/2\) about ϕ(x) in ℂ (see Fig. 3.2). Denote j := max(y). Since S is hyperbolic, ∂Di intersects ∂Dj at least one point and, upon applying a suitable Möbius transformation, we may suppose that one of these points lies at infinity. In particular Dj is a disk in ℂ. However, by (3.2.18) and (3.2.22),
It follows by (3.2.18) again that Dj contains a ball of radius \((\sqrt {5}-1)/2\) about ϕ(y). In particular, ϕ(x) ∈ Dj, so that x ∈ αj(Dj) and j ∈ I(x), as desired. □

Here, y is the closest point of \(\hat {K}_x\) to ϕ(x), and H is the supporting half-space to \(\hat {K}_x\) at this point whose inward-pointing normal points towards ϕ(x). For any other point z of H, ∂H is closer to z than \(\hat {K}_x\), which in turn is no further from to z than y
Corollary 3.2.13
Let S be a developable Möbius surface of hyperbolic type with developing map\(\phi :S\rightarrow \hat {\Bbb {C}}\)and Kulkarni–Pinkall form ωϕ. Let x be a point of S. With Uxas in Lemma3.2.12, for all y ∈ Ux,
Combining the above results yields a description of the analytic properties of the Kulkarni–Pinkall form of every Möbius surface.
Theorem 3.2.14
Let S be a developable Möbius surface with developing map\(\phi :S\rightarrow \hat {\Bbb {C}}\), Kulkarni–Pinkall form ωϕand Möbius disk decomposition (Di, αi)i ∈ I.
-
(1)
If S is of elliptic or parabolic type, then ωϕvanishes identically.
-
(2)
If S is of hyperbolic type, then ωϕis a nowhere vanishing section of Λ2S.
Furthermore ωϕ(x) and D(x) := Dmax(x)are\(C^{0,1}_{\mathrm {loc}}\)functions over S.
Finally, Lemma 3.2.12 also shows that the Kulkarni–Pinkall metric of any Möbius surface of hyperbolic type is everywhere non-degenerate. In addition, we also obtain the following global information concerning this metric.
Lemma 3.2.15
Let S be a developable Möbius surface with developing map ϕ. The Kulkarni–Pinkall metric g ϕ of S is complete.
Proof
It suffices to show that there exists r0 > 0 such that the closed ball of radius r0 with respect to gϕ about any point of S is compact. Let (Di, αi)i ∈ I denote the Möbius disk decomposition of S and for all i, let Hi denote the open half-space in ℍ3 with ideal boundary Di. We consider first the case where (S, ϕ) = ( Ω, z) for some connected neighbourhood Ω of 0 in ℂ. We identify ℍ3 with the upper half-space in ℂ ×ℝ. Let K denote the convex hull in ℍ3 of the complement of Ω in \(\hat {\Bbb {C}}\). We may suppose that D := Dmax(0) is the unit disk about the origin so that (0, 1)t is a boundary point of K. In particular, for all j ∈ I, (0, 1)t∉Hj. However, a symmetry argument shows that if ωSph denotes the standard spherical area form of \(\hat {\Bbb {C}}\) then, for all \(z\in \hat {\Bbb {C}}\),
where J(z) is the set of all indices j such that z ∈ Dj but (0, 1)t∉Hj. It follows that
Consider now the general case. Let x be a point of S. Let ( Ωx, αx) denote the localisation of S at this point. As before, we may suppose that ϕ(x) = 0 and that D := Dmax(x) is the unit disk in ℂ about the origin. Let Ux be as in Lemma 3.2.12. Recall now that the hyperbolic distance in D is given by
From this we verify that ϕ(Ux) coincides with the Euclidean disk of radius \((\sqrt {5}-2)\). However, by the preceding paragraph, over this disk,
so that Ux contains the open disk of radius \({\mathrm {arcsin}}((\sqrt {5}+2)/10)\) with respect to gϕ about x. The result now follows with r0 equal to this radius. □
3.3 Hyperbolic Ends
3.3.1 Hyperbolic Ends
Given a hyperbolic manifold X, we define a height function over X to be a strictly convex \(C^{1,1}_{\mathrm {loc}}\) function h : X →]0, ∞[ such that
-
(1)
the gradient flow lines of h are unit speed geodesics; and
-
(2)
for all t > 0, h−1([t, ∞[) is complete.
We will see in Lemma 3.3.5, below, that height functions, whenever they exist, are unique. We define a hyperbolic end to be a hyperbolic manifold which carries a height function. The family of hyperbolic ends forms a category whose morphisms are those functions ψ : X → X′ which are local isometries. Naturally, we identify hyperbolic ends which are isometric.
We first identify various components of hyperbolic ends. Let X be a hyperbolic end with height function h. We call the gradient flow lines of hvertical lines. These curves form a geodesic foliation of X which we denote by \(\mathcal {V}\) and which we call its vertical line foliation. We call the level sets of h the levels of X. These form another foliation of X by \(C^{1,1}_{\mathrm {loc}}\) embedded surfaces which we call its level set foliation and which we denote by (Xt)t>0. These two foliations are transverse to one another and every vertical line intersects every level at exactly one point. From this it follows that every level of X is naturally homeomorphic to the leaf space of \(\mathcal {V}\). For all t > 0, we define the vertical projectionπt : X → Xt to be the function which sends each point x of X to the intersection with Xt of the vertical line on which it lies. By standard properties of convex sets in ℍ3, for all t > 0, πt restricts to a 1-Lipschitz function from h−1([t, ∞[) into Xt.
We call any local isometry ϕ : X →ℍ3 a developing map of X. Any two developing maps ϕ, ϕ′ : X →ℍ3 are related by
for some isometry α of ℍ3. We say that X is developable whenever it has a developing map. In particular, every simply connected hyperbolic end has this property. In the following sections, we will only be concerned with developable hyperbolic ends and we leave the reader to formulate the trivial extensions of our results to the general case. In particular, we will take the developing maps to be given, and we leave the reader to verify that our constructions are independent of the developing maps chosen.
The model examples of hyperbolic ends are the complements Ω of closed, convex subsets K of ℍ3, where the height function is the distance to K. More sophisticated examples are given by quotients of such subsets by subgroups of the Möbius group PSL(2, ℂ), such as the ends of quasi-Fuchsian manifolds studied in the introduction. We recall in addition that the complement of the Nielsen kernel of every finite geometry hyperbolic manifold is the union of finitely many hyperbolic ends (see, for example, [15]). However, we emphasize again that it is straightforward to construct hyperbolic ends that do not arise in this manner. Indeed, the developing map of the universal cover of any end of any finite geometry hyperbolic manifold with fundamental group not equal to ℤ is an embedding in ℍ3. However, as we will see in Sect. 3.3.5, it is straightforward to construct simply connected hyperbolic ends with non-injective developing maps.
The key to understanding hyperbolic ends lies in the following analogue of the Hopf–Rinow Theorem.
Theorem 3.3.1
Let (X, h) be a hyperbolic end. If γ : [0, a[→ X is a geodesic segment such that\(\dot {\gamma }(0)\)is not downward-pointing, then γ extends to a geodesic ray defined over the entire half-line [0, ∞[.
Remark 3.3.2
A suitably modified version of Theorem 3.3.1 holds under the weaker condition that there exists a convex function f : X →]0, ∞[ such that f−1([t, ∞[) is complete for all t > 0. In fact, using the arguments of the following sections, we may show that a hyperbolic manifold X is a hyperbolic end whenever there exists a \(C^{1,1}_{\mathrm {loc}}\) convex function f : X →]0, ∞[ such that f−1([t, ∞[) is complete for all t > 0 and ∥∇f∥≥ 𝜖 > 0. Such functions, which one may call generalised height functions are thus natural objects of study in the theory of hyperbolic ends (c.f. [1]).
Proof
By strict convexity of h, (h ∘ γ) has strictly increasing derivative. Since, by hypothesis, (h ∘ γ) has non-negative derivative at 0, it follows that its derivative is strictly positive for all positive time, so that (h ∘ γ) is itself strictly increasing. In particular, γ remains within a complete subset of X and may thus be extended indefinitely, as desired. □
3.3.2 The Half-Space Decomposition
Let X be a developable hyperbolic end with height function h and developing map ϕ : X →ℍ3. We define a half-space in X to be a pair (H, α) where H is an open half-space in ℍ3 and α : H → X satisfies
We call the set (Hi, αi)i ∈ I of all half-spaces in X its half-space decomposition.
Lemma 3.3.3
Let X be a developable hyperbolic end with height function h. For all x ∈ X, there exists a unique half-space (H, α) in X such that x ∈ ∂α(H) and ∇h(x) is the inward-pointing normal to ∂α(H) at this point.
Proof
Let ϕ denote a developing map of X. Let x be a point of X. Define the subset E+ of TxX by \(E^+:=\left \{\xi \ |\ \langle \xi ,\nabla h(x)\rangle >0\right \}\). By Theorem 3.3.1, E+ lies within the domain of the exponential map Expx of X at x. By Hadamard’s theorem, the composition (ϕ ∘Expx) restricts to a diffeomorphism from E+ onto its image H := (ϕ ∘Expx)(E+). This image is an open half-space in ℍ3 and the function α := Expx ∘ (ϕ ∘Expx)−1 is the desired right-inverse of ϕ. We readily verify that (H, α) is the desired half-space and that it is unique. This completes the proof. □
Corollary 3.3.4
Let X be a developable hyperbolic end. The half-space decomposition of X covers X.
Proof
Indeed, for all x ∈ X, upon applying Lemma 3.3.3 to any point lying vertically below x, we obtain a half-space in X containing x. The result follows. □
We define the join relation ∼ of the half-space decomposition such that, for all i, j ∈ I,
This relation is trivially reflexive and symmetric, but not transitive. Composing with ϕ, we obtain
and
As in Sect. 3.2.2, we call the pair ((Hi)i ∈ I, ∼) the combinatorial data of X. By Theorem 3.2.2 and the subsequent remark, this data is sufficient to recover X up to isometry.
As a first application of the half-space decomposition, we obtain an elementary formula for the height function. Indeed, for all x ∈ X, let I(x) denote the set of indices i ∈ I such that x ∈ αi(Hi).
Lemma 3.3.5
Let X be a developable hyperbolic end with height function h, developing map ϕ, and half-space decomposition (Hi, αi)i ∈ I. For all x ∈ X,
In particular, the height function of X is unique.
Proof
Choose x ∈ X. Since the integral curves of the gradient of h are unit speed geodesics,
Conversely, by completeness, there exists an integral curve γ :] − h(x), ∞[→ X of ∇h such that γ(0) = x. By Lemma 3.3.3, for all 𝜖 > 0, there exists k ∈ I(x) such that γ(𝜖 − h(x)) ∈ ∂αk(Hk) and \(\dot {\gamma }(\epsilon -h(x))\) is the inward-pointing normal to ∂αk(Hk) at this point. In particular,
Since 𝜖 > 0 is arbitrary, the result follows. □
Corollary 3.3.6 (Monotonicity)
Let X and X′ be developable hyperbolic ends with respective height functions h and h′. If ψ : X → X′ is a morphism, then
Proof
Indeed, ψ sends the half-space decomposition of X into the half-space decomposition of X′. □
More generally, we obtain the following structure result for morphisms of hyperbolic ends.
Lemma 3.3.7
Let X and X′ be developable hyperbolic ends with respective height functions h and h′. If ψ : X → X′ is a morphism then, for all x ∈ X,
Proof
Let ϕ : X →ℍ3 and ϕ′ : X′→ℍ3 be developing maps such that ϕ = ϕ′∘ ψ. Let x be a point of X. By Lemma 3.3.3, there exists a unique half-space (H, α) in X such that x ∈ ∂α(H) and ∇h is the inward-pointing normal to ∂α(H) at this point. Observe furthermore that the closure of α(H) is complete in X. Its image (H, ψ ∘ α) is a half-space in X′ such that the closure of (ψ ∘ α)(H) is complete in X′. Denote Y ′ := ∂(ψ ∘ α)(H) and let N′ : Y ′→ TX′ denote its inward-pointing unit normal vector field. At every point of Y ′, 〈N′, ∇h′〉 > 0, for otherwise h′ would vanish at some point x′ of the closure of (ψ ∘ α)(H), which is absurd. The result now follows upon pulling back this inequality through ψ and evaluating at x. □
3.3.3 Geodesic Arcs and Convexity
Geodesic arcs in the half-space decomposition are defined in a similar manner as in the Möbius case. We first consider open half-spaces H0 and H1 in ℍ3. We say that H0 and H1overlap whenever their boundaries meet along a geodesic. Observe that this holds if and only if their intersection is non-trivial, the intersection of their complements is non-trivial and one is not contained within the other. When H0 and H1 overlap, we define the geodesic arc between them to be the set of all open half-spaces H in ℍ3 such that
This definition extends to half-spaces in developable hyperbolic ends as follows. Let X be a developable hyperbolic end with developing map ϕ. We say that two distinct open half-spaces (H0, α0) and (H1, α1) in Xoverlap whenever the sets α0(H0) and α1(H1) have non-trivial intersection and neither is contained within the other. Upon composing with ϕ, it follows that H0 and H1 likewise have non-trivial intersection, and neither is contained within the other. Furthermore, their complements also have non-trivial intersection, for otherwise X would be isometric to ℍ3, contradicting the existence of a height function. H0 and H1 consequently overlap. Using a connectedness argument, we show that
so that these functions join to define a function α01 : H0 ∪ H1 → X such that
In particular, for any other open half-space H along the geodesic arc from H0 to H1, (H, α01|H) is also a half-space in X. We thus define the geodesic arc from (H0, α0) to (H1, α1) to be the set of all half-spaces in X of this form. We say that a subset (Hi, αi)i ∈ J of the half-space decomposition of X is convex whenever it contains the geodesic arc between any two of its overlapping elements.
Using this concept of convexity, we obtain deeper information about the structure of the height function. Indeed, let X be a simply connected hyperbolic end with height function h, developing map ϕ and half-space decomposition (Hi, αi)i ∈ I. For all x ∈ X, let I(x) be as in the preceding section and observe now that this set is convex. For all i ∈ I(x), let rx,i denote the supremal radius of open geodesic balls in Hi centred on ϕ(x). By Lemma 3.3.5, the height function h of X satisfies
For all x ∈ X, define the partial order ≥x over I such that, for all i, j ∈ I,
Define also
By a connectedness argument, for all i, j ∈ I(x),
so that these functions join to define a smooth function \(\alpha _x:\hat {\Omega }_x\rightarrow X\) such that
We call \((\hat {\Omega }_x,\alpha _x)\) the localisation of X about x. Let \(\hat {K}_x\) denote the complement of \(\hat {\Omega }_x\) in ℍ3 and let \(h_x:\hat {\Omega }_x\rightarrow \Bbb {R}\) denote the distance to \(\hat {K}_x\). Since \(\hat {K}_x\) is an intersection of closed half-spaces, it is a closed, convex subset of ℍ3 so that \(\hat {\Omega }_x\) is a hyperbolic end with height function hx.
Lemma & Definition 3.3.8
Let X be a developable hyperbolic end with height function h and developing map ϕ. Let x be a point of X, let\((\hat {\Omega }_x,\alpha _x)\)denote the localisation of X at x, and let hxdenote its height function. I(x) contains a unique maximal element for ≥xwhich realises h(x). Furthermore,
and for all\(y\in \alpha _x(\hat {\Omega }_x)\),
We denote by max(x) the unique maximal element of I(x).
Proof
Let x be a point of X. Since, by (3.3.12), (rx,i)i ∈ I(x) is bounded above by h(x), I(x) contains a maximal element, and existence follows. Since I(x) is convex and since the restriction of rx,i to every geodesic arc in I(x) is strictly concave, uniqueness follows. Finally, since αx sends the half-space decomposition of \(\hat {\Omega }_x\) to I(x), (3.3.17) and (3.3.18) follow, and this completes the proof. □
Lemma 3.3.9
Let X be a developable hyperbolic end with developing map ϕ. Let x be a point of X and let\((\hat {\Omega }_x,\alpha _x)\)denote the localisation of X about x. There exists a neighbourhood Uxof x in\(\alpha _x(\hat {\Omega }_x)\)such that, for all y ∈ Ux,
Proof
Let h denote the height function of X and let (Hi, αi)i ∈ I denote its half-space decomposition. For x ∈ X, define
For y ∈ Ux, h(y) > h(x)∕2. It follows that if i := max(y), then Hi contains the ball of radius h(x)∕2 about ϕ(y). In particular, ϕ(x) is an element of Hi, so that x is an element of αi(Hi), and i ∈ I(x), as desired. □
Corollary 3.3.10
Let X be a developable hyperbolic end with height function h and developing map ϕ. Let x be a point of X, let\((\hat {\Omega }_x,\alpha _x)\)denote the localisation of X about x, and let hxdenote its height function. With Uxas in Lemma3.3.9, for y ∈ Ux,
Proof
Indeed, αx sends the half-space decomposition of \(\hat {\Omega }_x\) to I(x). □
We are now ready to determine more refined analytic properties of the height function. We first require the following definition of PDE theory (c.f. [3]). Given a smooth manifold Y , a point y ∈ Y , a function f : Y →ℝ and a symmetric bilinear form B over TyY , we say that
in the weak sense whenever there exists a neighbourhood Ω of y in Y and a smooth function g : Ω →ℝ such that
-
(1)
g ≤ f;
-
(2)
g(y) = f(y); and
-
(3)
Hess(g)(y) = B.
We likewise say that Hess(f)(y) ≤ B in the weak sense whenever Hess(−f)(y) ≥−B in the weak sense.
Lemma 3.3.11
Let X be a developable hyperbolic end with height function h. For all x ∈ X, with respect to the decomposition TxX = Ker(dh(x)) ⊕〈∇h(x)〉,
in the weak sense.
Proof
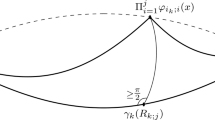
Let ϕ denote the developing map of X. Let x be a point of X. By Corollary 3.3.10, it suffices to prove the result for the localisation \((\hat {\Omega }_x,\alpha _x)\) of X at x. Let \(y\in \hat {K}_x\) be the closest point to ϕ(x). Let H denote the supporting open half-space to \(\hat {K}_x\) at y whose boundary is normal to the geodesic joining y to ϕ(x) (see Fig. 3.3). Let f, g : ℍ3 →ℝ denote respectively the distance to y and the distance to ∂H. Trivially, f(ϕ(x)) = g(ϕ(x)) = hx(ϕ(x)) and, over H, g ≤ hx ≤ f. The result now follows upon explicitly determining the hessian operators of f and g at ϕ(x). □

The totally geodesic plane P contains both γ and \(\hat {x}\). The curve μ lies at constant distance from γ and is contained in P
3.3.4 Ideal Boundaries
We now study functors which map between the categories of simply connected Möbius surfaces and simply connected hyperbolic ends. We first describe the ideal boundary functor ∂∞ which associates a simply connected Möbius surface to every simply connected hyperbolic end. For this we require the following finer control of complete geodesic rays in hyperbolic ends.
Lemma & Definition 3.3.12
Let X be a developed hyperbolic end with height function h. For every complete geodesic ray γ : [0, ∞[→ X,
We say that γ is bounded whenever this limit is zero and unbounded otherwise.
Proof
Indeed, by convexity (h ∘ γ)(t) converges to a (possibly infinite) limit as t tends to infinity. Suppose now that
for some 𝜖 > 0. Denoting f(t) := (h ∘ γ)(t), (3.3.22) yields, for sufficiently large t,
in the weak sense. Upon solving this ordinary differential inequality, we see that f(t) tends to + ∞ as t tends to infinity, as desired. □
Lemma 3.3.13
Let X be a developable hyperbolic end and let γ : [0, ∞[→ X be a complete, unbounded geodesic ray. For all t > 0, there exists x ∈ Xtsuch that
In particular, γ is asymptotic to the vertical line passing through x.
Proof
Naturally, we may suppose that γ is parametrized by arc-length. Let h denote the height function of X. By (3.3.22), for sufficiently large t, the function \(f:=\langle \dot {\gamma },\nabla h\circ \gamma \rangle \) satisfies
in the weak sense. Solving this ordinary differential inequality, we show that f converges exponentially fast to 1, so that the component of \(\dot {\gamma }\) orthogonal to ∇h ∘ γ converges exponentially fast to zero. Since πt is 1-Lipschitz, and since ∇h lies in the kernel of Dπt, the curve (πt ∘ γ) thus has finite length, and the result now follows by completeness. □
Let X be a developable hyperbolic end with developing map ϕ. We define ∂∞X, the ideal boundary of X, to be the space of equivalence classes of complete, unbounded geodesic rays in X, where two such rays are deemed equivalent whenever they are asymptotic to one another. The union X ∪ ∂∞X is topologised as follows. By Theorem 3.3.1, for all x ∈ X, for every upward-pointing unit vector ξ ∈ TxX, for all r > 0, and for sufficiently small θ ∈ ]0, π[, the truncated cone
is well-defined. For all such ξ, θ and r, we define the ideal boundary ∂∞C(ξ, θ, r) to be the set of equivalence classes of unbounded geodesic rays which eventually lie in C(ξ, θ, r). The collection of all sets of the form
together with the open subsets of X forms a basis of a Haussdorf topology of X ∪ ∂∞X which we call the cone topology. In particular, with respect to this topology, ∂∞X has the structure of a topological surface.
By Lemma 3.3.13, every complete geodesic ray in X is asymptotic to some vertical line. On the other hand, since πt is 1-Lipschitz for all t, no two vertical lines are asymptotic to one another. It follows that ∂∞X is homeomorphic to the leaf space of the vertical line foliation of X which, we recall, is in turn homeomorphic to every level Xt of X. In particular, since X retracts onto Xt for all t, it follows that X and ∂∞X are homotopy equivalent.
Since the developing map ϕ : X →ℍ3 sends complete geodesic rays continuously to complete geodesic rays, it defines a continuous function ∂∞ϕ : ∂∞X → ∂∞ℍ3. By standard properties of convex subsets of hyperbolic space, this function is a local homeomorphism and thus defines a developable Möbius structure over ∂∞X which we readily verify is of hyperbolic type. In particular, we verify that, for all t, the homeomorphism sending ∂∞X to Xt is in fact a smooth diffeomorphism with respect to this structure.
Finally, let X′ be another developable hyperbolic end with developing map ϕ′ : X′→ℍ3 and let ψ : X → X′ be a morphism such that ϕ := ϕ′∘ ψ. Since ψ also maps complete, unbounded geodesic rays continuously to complete, unbounded geodesic rays, it defines a morphism ∂∞ψ : ∂∞X → ∂∞X′ such that ∂∞ϕ′∘ ∂∞ψ = ∂∞ϕ. We verify that ∂∞ respects identity elements and compositions, and thus defines a covariant functor from the category of simply connected hyperbolic ends into the category of simply connected Möbius surfaces.
It is useful to observe how the ideal boundary functor acts on the half-space decomposition of the hyperbolic end.
Lemma 3.3.14
Let X be a developable hyperbolic end with developing map ϕ, let (Hi, αi)i ∈ Idenote its half-space decomposition, and let ∼ denote its join relation. Then (∂∞Hi, ∂∞αi)i ∈ Iis a subset of the Möbius disk decomposition of (∂∞X, ∂∞ϕ) which covers ∂∞X. Furthermore, the restriction to I of the join relation of the Möbius disk decomposition of ∂∞X coincides with ∼.
Remark 3.3.15
Significantly, however, (∂∞Hi, ∂∞αi)i ∈ I rarely accounts for the entire Möbius disk decomposition of ∂∞X. Indeed, this only occurs when X is functionally maximal in the sense of Lemma and Definition 3.3.21, below.
Proof
For all i, ∂∞Hi is a disk in \(\hat {\Bbb {C}}=\partial _\infty \Bbb {H}^3\) and, by functoriality, ∂∞αi defines a function from ∂∞Hi into ∂∞X such that
It follows that (∂∞Hi, ∂∞αi)i ∈ I is a subset of the Möbius disk decomposition of ∂∞X. We now show that (∂∞Hi, ∂∞αi)i ∈ I covers ∂∞X. Let γ : [0, ∞[→ X be a complete, unit speed geodesic ray. Let t0 > 0 be such that \(\dot {\gamma }(t_0)\) is upward pointing. Let i be the unique element of I such that γ(t0) ∈ ∂Hi and \(\dot {\gamma }(t_0)\) is the inward pointing unit normal to ∂Hi at this point. The equivalence class of γ is then an element of ∂∞αi(∂∞Hi) and since γ is arbitrary, it follows that (∂∞Hi, ∂∞αi)i ∈ I covers ∂∞X, as desired. Finally, we readily show that, for all i, j ∈ I,
so that the restriction to I of the join relation of the Möbius disk decomposition of ∂∞X coincides with ∼, as desired. □
It is also worth verifying that half-spaces in X are uniquely determined by their ideal boundaries in ∂∞X.
Lemma 3.3.16
Let X be a developable hyperbolic end. For any two half-spaces (Hi, αi) and (Hj, αj) in X,
Proof
Since ∂∞Hi = ∂∞Hj, we have Hi = Hj =: H. Let ϕ denote the developing map of X. Denote U := αi(Hi) ∩ αj(Hj) and V = ϕ(U). Observe that, over V , αi = ϕ−1 = αj. It thus suffices to show that V = H. However, since αi and αj are local isometries, ∂V is a totally geodesic subset of \(\overline {H}\) and, since ∂∞αi = ∂∞αj, ∂∞V = ∂∞H, so that V = H, as desired. □
Finally, the following estimate, though elementary, will play a key role in Sect. 3.4 in the study of quasicomplete ISC immersions in ℍ3. Let X be a developable hyperbolic end with developing map ϕ and let (∂∞X, ∂∞ϕ) denote its ideal boundary. Let π∞ : X → ∂∞X denote the function that sends every point x ∈ X to the equivalence class of the vertical line on which it lies. We call π∞ the vertical line projection.
Lemma 3.3.17
Let X be a developable hyperbolic end with developing map ϕ, let (∂∞X, ∂∞ϕ) denote its ideal boundary, let ω∞denote the Kulkarni–Pinkall form of ∂∞X and let π∞ : X → ∂∞X denote the vertical line projection. For all x ∈ X,
where B here denotes the parametrisation of the space of open horoballs in ℍ3by Λ2∂∞ℍ3as described in Sect.3.1.2.
Proof
Let h denote the height function of X, let x be a point of X and denote x∞ := π∞(x). Let y be a point of X lying vertically below x. In particular, x∞ = π∞(y). Let (H, α) be the unique half-space of X such that y ∈ ∂α(H) and ∇h(y) is the inward-pointing unit normal to ∂α(H) at this point. Since ∂∞ is functorial, (∂∞H, ∂∞α) is a Möbius disk in ∂∞X. By definition of the Kulkarni–Pinkall form,
Thus, if B is the largest open horoball contained in H with asymptotic centre ∂∞ϕ(x∞), then
Since B is an interior tangent to ∂H at ϕ(y), it contains ϕ(x), and the result follows. □
3.3.5 Extensions of Möbius Surfaces
We now construct the extension functor \({\mathcal {H}}\), and show that it is a right-inverse functor of ∂∞. Let S be a developable Möbius surface of hyperbolic type with developing map ϕ. Let (Di, αi)i ∈ I denote its Möbius disk decomposition and let ∼ denote its join relation. For all i, let Hi denote the open half-space in ℍ3 with ideal boundary Di. Observe that ((Hi)i ∈ I, ∼) are combinatorial data of some hyperbolic manifold in the sense of Theorem 3.2.2. Let \({\mathcal {H}}S\), \({\mathcal {H}}\phi :{\mathcal {H}}S\rightarrow \Bbb {H}^3\) and \(({\mathcal {H}}\alpha _i)_{i\in I}\) denote respectively the join of (Hi)i ∈ I, its canonical immersion and its canonical parametrisations. In particular, \((H_i,{\mathcal {H}}\alpha _i)_{i\in I}\) is a half-space decomposition of \({\mathcal {H}}S\).
In order to show that \({\mathcal {H}}S\) is a hyperbolic end, it remains only to construct its height function. Bearing in mind Lemma 3.3.5, we proceed as follows. For \(x\in {\mathcal {H}}S\), let I(x) denote the subset of I consisting of those indices for which \(x\in {\mathcal {H}}\alpha _i(H_i)\), and observe that this set is convex. For all i ∈ I(x), let rx,i denote the supremal radius of open geodesic balls in Hi centred on \({\mathcal {H}}\phi (x)\). We now define the function \(h:{\mathcal {H}}S\rightarrow \Bbb {R}\) by
Lemma 3.3.18
The function h is a height function over\({\mathcal {H}}S\).
Proof
We first observe that, since S is of hyperbolic type, I(x) contains a maximal element for all \(x\in {\mathcal {H}}S\), and uniqueness of this maximal element follows by the convexity arguments already used earlier in this section. The construction and results of Sect. 3.3.3 now follow as before. It remains only to verify that h has the required analytic properties. Let x be a point of \({\mathcal {H}}S\). Let \((\hat {\Omega }_x,{\mathcal {H}}\alpha _x)\) denote the localisation of \({\mathcal {H}}S\) at this point and let hx denote its height function. With Ux as in Lemma 3.3.9, for all y ∈ Ux, \(h(y)=(h_x\circ {\mathcal {H}}\phi )(x)\). It thus follows by standard properties of convex sets in ℍ3 that h is a locally strictly convex \(C^{1,1}_{\mathrm {loc}}\) function whose gradient flow lines are unit speed geodesics. Finally, for all t > 0, for all \(x\in {\mathcal {H}}S\) such that h(x) ≥ t, and for all 𝜖 < t, the closed ball of radius (t − 𝜖) about x in \({\mathcal {H}}S\) is complete. It follows that h−1([t, ∞[) is complete for all t > 0, and this completes the proof. □
It follows by Lemma 3.3.18 that the operator \({\mathcal {H}}\) associates a hyperbolic end \({\mathcal {H}}S\) to every developable Möbius surface S of hyperbolic type. Given two such Möbius surfaces S and S′ and an injective morphism ϕ : S → S′, Theorem 3.2.2 yields a canonically defined morphism \({\mathcal {H}}\phi :{\mathcal {H}}S\rightarrow {\mathcal {H}}S'\). We verify that \({\mathcal {H}}\) respects identity elements and compositions and thus defines a covariant functor between these two categories. We call \({\mathcal {H}}\) the extension functor. It is a right inverse of the ideal boundary functor, as the following result shows.
Lemma 3.3.19
Let S be a developable Möbius surface of hyperbolic type with developing map ϕ, Möbius disk decomposition (Di, αi)i ∈ Iand extension\(({\mathcal {H}}S,{\mathcal {H}}\phi )\). There exists a unique isomorphism\(\psi :S\rightarrow \partial _\infty {\mathcal {H}}S\)such that, for all i,
Remark 3.3.20
Naturally, in what follows, rather than mention ψ explicitly, we identify S and \(\partial _\infty {\mathcal {H}}S\).
Proof
For all i, let Hi denote the open half-space in ℍ3 with ideal boundary Di. Since \((H_i,{\mathcal {H}}\alpha _i)_{i\in I}\) is a subset of the half-space decomposition of \({\mathcal {H}}S\) which covers \({\mathcal {H}}S\), by Lemma 3.3.14, \((D_i,\partial _\infty {\mathcal {H}}\alpha _i)_{i\in I}\) is a subset of the Möbius disk decomposition of \(\partial _\infty {\mathcal {H}}S\) which likewise covers \(\partial _\infty {\mathcal {H}}S\). Furthermore, the join relation of this decomposition coincides with that of \((H_i,{\mathcal {H}}\alpha _i)\), which in turn coincides with that of (Di, αi)i ∈ I. It follows by Theorem 3.2.2 that there exists a unique diffeomorphism \(\psi :S\rightarrow \partial _\infty {\mathcal {H}}S\) satisfying (3.3.30), as desired. □
Finally, the height functions of hyperbolic ends obtained by extending Möbius surfaces have more structure than in the general case. Indeed, given a function f : X →ℝ, a point x ∈ X, a vector ξ ∈ Tx(X) and a real number λ ∈ℝ, we say that
in the weak sense whenever there exists a geodesic segment γ :] − 𝜖, 𝜖[→ X such that γ(0) = x, \(\dot {\gamma }(x)=\xi \), and
in the weak sense of Sect. 3.3.3.
Lemma & Definition 3.3.21
Let S be a developable Möbius surface of hyperbolic type, let \({\mathcal {H}}S\) denote its extension, and let h denote the height function of \({\mathcal {H}}S\) . For all \(x\in {\mathcal {H}}S\) , there exists a unit vector \(\xi \in T_x{\mathcal {H}}S\) such that
in the weak sense. We say that a hyperbolic end X is functionally maximalwhenever its height function satisfies (3.3.34).
Remark 3.3.22
We will see in Theorem 3.3.25, below, that a hyperbolic end is an extension of a Möbius surface if and only if it is functionally maximal.
Proof
Let ϕ denote the developing map of S, let (Di, αi)i ∈ I denote its Möbius disk decomposition, and, for all i, let Hi denote the open half-space in ℍ3 with ideal boundary Di. Let x be a point of \({\mathcal {H}}S\), let \((\hat {\Omega }_x,{\mathcal {H}}\alpha _x)\) denote the localisation of \({\mathcal {H}}S\) about x and let hx denote its height function.
Denote y := π∞(x). Let ( Ωy, αy) denote the localisation of (S, ϕ) about y and denote
Let \(\hat {K}_y\) denote the complement of \({\mathcal {H}}\Omega _y\) in ℍ3. Let \(h_y:{\mathcal {H}}\Omega _y\rightarrow ]0,\infty [\) denote the distance to \(\hat {K}_y\) and observe that hy is a height function over \({\mathcal {H}}\Omega _y\) so that \({\mathcal {H}}\Omega _y\) is a hyperbolic end. Indeed, it is none other than the extension of Ωy. By functoriality, the extension of αy is a morphism \({\mathcal {H}}\alpha _y:{\mathcal {H}}\Omega _y\rightarrow {\mathcal {H}}S\) such that
In particular, \({\mathcal {H}}\alpha _y\) embeds \({\mathcal {H}}\Omega _y\) into \({\mathcal {H}}S\).
For all i ∈ I,
so that every half-space in \((\hat {\Omega }_x,{\mathcal {H}}\alpha _x)\) is also a half-space in \(({\mathcal {H}}\Omega _y,{\mathcal {H}}\alpha _y)\). Consequently,
It follows by Corollaries 3.3.6 and 3.3.10 that, over Ux,
Now let z denote the closest point in \(\hat {K}_y\) to \(\hat {x}:={\mathcal {H}}\phi (x)\). Since \(\hat {K}_y\) is the convex hull in ℍ3 of the complement of Ωy in ∂∞ℍ3, there exists an open geodesic segment \(\gamma :]-\epsilon ,\epsilon [\rightarrow \hat {K}_y\) such that γ(0) = z (see, for example, Section 4.5 of [27]). Let P ⊆ℍ3 be the totally geodesic plane containing γ and \(\hat {x}\). Let μ :] − δ, δ[→ P be a curve segment in P lying at constant distance from γ such that \(\mu (0)=\hat {x}\) (see Fig. 3.4). Since μ has constant geodesic curvature equal to tanh(h(x)), upon denoting \(\xi :=\dot {\mu }(0)\), we obtain
in the weak sense, and this completes the proof. □

The fundamental domain of ek
3.3.6 Left Inverses and Applications
We study the extent to which \({\mathcal {H}}\) is also a left inverse of ∂∞.
Lemma 3.3.23
Let S be a developable Möbius surface with developing map ϕ. Let X be a developable hyperbolic end with developing map ψ. Let f : ∂∞X → S be an injective morphism such that
There exists a unique injective morphism \(\hat {f}:X\rightarrow {\mathcal {H}}S\) such that
Proof
Let (Di, αi)i ∈ I denote the Möbius disk decomposition of S with join relation ∼α, let (Hj, βj)j ∈ J denote the half-space decomposition of X with join relation ∼β, and, for all j ∈ J, denote Dj := ∂∞Hj. By Lemma 3.3.14, (Dj, ∂∞βj)j ∈ J is a subset of the Möbius disk decomposition of ∂∞X which covers ∂∞X. By (3.3.35), (Dj, f ∘ ∂∞βj)j ∈ J is a subset of the Möbius disk decomposition of S which covers Im(f). We thus identify J with a subset of I in such a manner that, for all j,
X identifies with the join of ((Hj)j ∈ J, ∼β) whilst the join Y of ((Hj)j ∈ J, ∼α) identifies with an open subset of \({\mathcal {H}}S\). However, by injectivity of f, the join relations ∼α and ∼β coincide over J, so that, by Theorem 3.2.2, there exists a unique isomorphism \(\hat {f}:X\rightarrow Y\) such that, for all j ∈ J,
Consequently, for all j,
Likewise, by functoriality,
Since (βj)j ∈ J and (∂∞βj)j ∈ J cover X and ∂∞X respectively, it follows that
Identifying \((\partial _\infty {\mathcal {H}})f\) with f as in Lemma 3.3.19, we obtain (3.3.37), and existence follows. To prove uniqueness, let \(\hat {f}':X\rightarrow {\mathcal {H}}S\) be another function satisfying (3.3.36) & (3.3.37). Let j be an element of J. Since
it follows that \((H_j,\hat {f}'\circ \beta _j)\) and \((H_j,\hat {f}\circ \beta _j)\) are half-spaces in \({\mathcal {H}}S\). Furthermore,
so that, by Lemma 3.3.16,
Since (Hj, βj)j ∈ J covers X, it follows that \(\hat {f}'=\hat {f}\), and uniqueness follows. □
With Lemma 3.3.23 in mind, we now study the relationship between two hyperbolic ends when one is contained within the other. Thus, let X be a developable hyperbolic end. Let \(\mathcal {V}\) denote its vertical line foliation whose leaf space we recall is naturally homeomorphic to ∂∞X. Let S be a C1 embedded surface in X. We say that S is a graph over an open subset Ω of ∂∞X whenever it is transverse to \(\mathcal {V}\) and the vertical line projection restricts to a homeomorphism from ∂S onto Ω.
Lemma 3.3.24
Let X and X′ be developable hyperbolic ends. If ψ : X → X′ is an injective morphism, then the image ψ(Xt) of every level of X is a graph over ∂∞ψ(∂∞X) in X′.
Proof
Indeed, choose t > 0. Let \(\pi ^{\prime }_\infty :X'\rightarrow \partial _\infty X'\) denote the vertical line projection of X′. By Lemma 3.3.7, Yt := ψ(Xt) is everywhere transverse to the vertical foliation of X′ so that the restriction of \(\pi _\infty ^{\prime }\) to this surface is everywhere a local homeomorphism. By Theorem 3.3.1, any vertical line which enters ψ(h−1[t, ∞[) remains within this set, so that no vertical line of X′ can cross Yt more than once. It follows that the restriction of \(\pi ^{\prime }_\infty \) to this surface is injective.
It only remains to prove surjectivity. By connectedness, it suffices to show that \(\pi _\infty ^{\prime }(Y_t)\) is a closed subset of ∂∞ψ(∂∞X). Thus, let \((x^{\prime }_m)_{m\in \Bbb {N}}\) be a sequence of points of \(\pi _\infty ^{\prime }(Y_t)\) converging to the limit \(x^{\prime }_\infty \in \partial _\infty \psi (\partial _\infty X)\). For all \(m\in \Bbb {N}\cup \left \{\infty \right \}\), let \(\gamma ^{\prime }_m:]0,\infty [\rightarrow X'\) be the height parametrisation of the vertical line of X′ terminating at \(x^{\prime }_m\) and, for all finite m, let Tm > 0 be such that \(\gamma ^{\prime }_m(T_m)\in Y_t\). Since \(x^{\prime }_\infty \) is an element of ∂∞ψ(∂∞X), there exists T > 0 such that \(\gamma ^{\prime }_\infty (T)\in \psi (X)\). Since ψ(X) is open, we may therefore suppose that \(\gamma ^{\prime }_m(T)\in \psi (X)\) for all m. In particular, Tm < T for all m, and we may therefore suppose that (Tm)m ∈ℕ converges to some value T∞, say. For all \(m\in \Bbb {N}\cup \left \{\infty \right \}\), let γm : [Tm − T, ∞[→ X denote the unit speed parametrisation of the preimage of \(\gamma ^{\prime }_m\) under ψ, normalised such that \(\psi (\gamma _m(0))=\gamma ^{\prime }_m(T)\). For all finite m, denote ym := μ(Tm − T) so that ym ∈ Xt and \(x_m^{\prime }=\psi (y_m)\). Since the projection along vertical lines in X to Xt is distance decreasing, it follows that
so that, by completeness, there exists a point y∞, say, of Xt towards which (ym)m ∈ℕ subconverges. We verify that \(\pi _\infty ^{\prime }(\psi (y_\infty ))=x^{\prime }_\infty \) so that \(\pi _\infty ^{\prime }(Y_t)\) is indeed a closed subset of ∂∞ψ(∂∞X). Surjectivity follows, and this completes the proof. □
Theorem 3.3.25
Let S be a developable Möbius surface of hyperbolic type with developing map ϕ. Let \(({\mathcal {H}}S,{\mathcal {H}}\phi )\) denote its extension. \({\mathcal {H}}S\) is the only functionally maximal developable hyperbolic end with ideal boundary S.
Proof
Let X be another developable hyperbolic end with height function h and developing map ψ such that ∂∞X = S. Let \(\hat {f}:X\rightarrow {\mathcal {H}}S\) denote the unique injective morphism such that \({\mathcal {H}}\phi \circ \hat {f}=\psi \) and \(\partial _\infty \hat {f}={\mathrm {Id}}\). We identify X with its image \(\hat {f}(X)\) in \({\mathcal {H}}S\). Let \(\hat {h}\) denote the height function of \({\mathcal {H}}S\). By Corollary 3.3.6, \(h\leq \hat {h}\). We now claim that \(h=\hat {h}\). Indeed, suppose the contrary. Choose \(x\in {\mathcal {H}}S\) such that \(\hat {h}(x)>h(x)\). By completeness, for sufficiently small 𝜖 > 0, there exists a geodesic ray \(\gamma :[-h(x)-\epsilon ,\infty [\rightarrow {\mathcal {H}}S\) such that γ(0) = x and \(\dot {\gamma }(0)=\nabla h(x)\). Let (H, α) be the unique half-space in \({\mathcal {H}}S\) such that γ(−h(x) − 𝜖) ∈ ∂α(H) and \(\dot {\gamma }(-h(x)-\epsilon )\) is the inward-pointing unit normal to ∂α(h) at this point, let h𝜖 : α(H) →]0, ∞[ denote distance to ∂α(H), and let Y𝜖 denote the level set of this function at height h(x) + 𝜖. For sufficiently small 𝜖, Y𝜖 is wholly contained in X and h restricts to a proper function over this set. Let y ∈ Y𝜖 be the point at which h is minimised. Since x ∈ Y𝜖, h(y) ≤ h(x). However, at this point, with respect to the decomposition TyX = Ker(dh(y)) ⊕〈∇h(y)〉,
which contradicts (3.3.34). It follows that \(h=\hat {h}\) as asserted. Finally, since every level of X is a graph over S, it follows that \(X={\mathcal {H}}S\), as desired. □
We conclude this section by addressing the case of non-developable Möbius surfaces and proving Theorem 3.1.8. Observe first that the definition of the ideal boundary functor ∂∞ given in Sect. 3.3.4 readily extends to the non-developable case. We now examine the extension functor. Let S be a Möbius surface with fundamental group Π. Let \(\tilde {S}\) denote its universal cover, let ϕ be a developing map of \(\tilde {S}\) and let θ denote its holonomy. Let \({\mathrm {Deck}}:\Pi \rightarrow {\mathrm {Isom}}(\tilde {S})\) denote the action of Π on \(\tilde {S}\) by deck transformations. By definition, for all γ ∈ Π,
By Lemma 3.3.23, Deck extends to a unique homeomorphism \({\mathcal {H}}{\mathrm {Deck}}:\Pi \rightarrow {\mathrm {Isom}}({\mathcal {H}}\tilde {S})\) such that
In addition, for all γ, \({\mathcal {H}}{\mathrm {Deck}}(\gamma )\) preserves every level of \({\mathcal {H}}\tilde {S}\), and its action on each level is conjugate to its action on S. It follows that \({\mathcal {H}}{\mathrm {Deck}}\) acts discretely on \({\mathcal {H}}\tilde {S}\), and we define
We verify that \({\mathcal {H}}S\) is a hyperbolic end with ideal boundary canonically isomorphic to S and, in the case where S is developable, this hyperbolic end is canonically isomorphic to the extension of S constructed above. This completes the construction of the extension functor in the non-developable case. We now prove Theorem 3.1.8.
Proof of Theorem 3.1.8
Suppose that \({\mathcal {H}}S\) is not maximal. There exists a hyperbolic end X and an injective morphism \(f:{\mathcal {H}}S\rightarrow X\) such that ∂∞f : S → ∂∞X is an isomorphism. In particular, ∂∞X, and therefore also X, has fundamental group Π. since ∂∞X is diffeomorphic to S, Π is also the fundamental group of X. Lifting to the universal covers, f defines a Π-equivariant injective morphism \(\tilde {f}:{\mathcal {H}}\tilde {S}\rightarrow \tilde {X}\) such that \(\partial _\infty \tilde {f}\) is an isomorphism. Now let ϕ and ψ be respectively developing maps of \(\tilde {S}\) and \(\tilde {X}\) such that
Since \(\partial _\infty \tilde {f}\) is an isomorphism, by Lemma 3.3.23, there exists a unique injective morphism \(g:\tilde {X}\rightarrow {\mathcal {H}}\tilde {S}\) such that \({\mathcal {H}}\phi \circ g=\psi \) and \(\partial _\infty g\circ \partial _\infty \tilde {f}={\mathrm {Id}}\). In particular
so that, by uniqueness,
Since g is injective, it is also a right-inverse of \(\tilde {f}\), so that \(\tilde {f}\) is an isomorphism, and therefore so too is f. This proves maximality. Uniqueness is proven in a similar manner, and this completes the proof. □
3.4 Infinitesimally Strictly Convex Immersions
3.4.1 Infinitesimally Strictly Convex Immersions
We define an immersed surface in ℍ3 to be a pair (S, e) where S is an oriented surface and e : S →ℍ3 is a smooth immersion. In what follows, we denote the immersed surface sometimes by S and sometimes by e, depending on which is more appropriate to the context. The family of immersed surfaces forms a category where the morphisms between two immersed surfaces (S, e) and (S, e′) are those functions ϕ : S → S′ such that e = e′∘ ϕ. Naturally, we identify two immersed surfaces which are isomorphic.
Let (S, e) be an immersed surface. In what follows, we will use the terminology of classical surface theory already described in Sect. 3.1.2. Recall that S is said to be infinitesimally strictly convex (ISC) whenever its second fundamental form is everywhere positive-definite. When this holds, every point x of S has a neighbourhood Ω over which e takes values on the boundary of some strictly convex subset X and Ne points outwards from this set. Recall also that S is said to be quasicomplete whenever the metric Ie + IIIe is complete. We now show that this is a natural requirement for studying ISC immersions in ℍ3 in terms of hyperbolic ends. Indeed, denote \({\mathcal {E}}S:=S\times ]0,\infty [\) and define the function \({\mathcal {E}} e:{\mathcal {E}}S\rightarrow \Bbb {H}^3\) by
where Exp here denotes the exponential map of ℍ3. By standard properties of convex surfaces in ℍ3, \({\mathcal {E}} e\) is an immersion and we therefore furnish \({\mathcal {E}}S\) with the unique hyperbolic metric that makes it into a local isometry.
Lemma & Definition 3.4.1
Let (S, e) be an ISC immersed surface in ℍ3. \({\mathcal {E}}S\)is a hyperbolic end if and only if S is quasicomplete. When this holds, we call\({\mathcal {E}}S\)the endof S, its developing map is\({\mathcal {E}} e\)and its height function is
Proof
It suffices to verify that h defines a height function over \({\mathcal {E}}S\) if and only if S is quasicomplete. By definition, h is smooth, its gradient flow lines are unit speed geodesics and, by standard properties of convex subsets of hyperbolic space, it is strictly convex. It thus remains only to study completeness. Choose t > 0 and let et denote the restriction of \({\mathcal {E}} e\) to \(S\times \left \{t\right \}\). By classical hyperbolic geometry, the first fundamental form of this immersion is
so that, by infinitesimal strict convexity,
It follows that Ie + IIIe is complete if and only if It is complete. However, by convexity, h−1([t, ∞[) is complete if and only if It is complete. Since t > 0 is arbitrary, it follows that h−1([t, ∞[) is complete for all t if and only if S is quasicomplete, as desired. □
The operation \({\mathcal {E}}\) trivially sends morphisms between quasicomplete ISC immersed surfaces to morphisms between hyperbolic ends. Since \({\mathcal {E}}\) respects identity elements and compositions, it therefore defines a covariant functor between these two categories which we call the end functor.
There is also a natural way to associate a Möbius surface to every ISC immersed surface. Indeed, let (S, e) be an ISC immersed surface and let ϕe denote its asymptotic Gauss map. By infinitesimal strict convexity, ϕe is a local diffeomorphism from S into \(\partial _\infty \Bbb {H}^3=\hat {\Bbb {C}}\) and is thus the developing map of a Möbius structure over S. We denote \(\mathcal {M}S:=S\) and \(\mathcal {M}e:=\phi _e\), and we verify that \(\mathcal {M}\) defines a covariant functor from the category of ISC immersed surfaces into the category of Möbius surfaces. However, this level of precision will be of little use to us and we will not use this terminology in other sections.
We have now reached a pivotal point of our construction. Indeed, we have associated two distinct hyperbolic ends to each quasicomplete ISC immersed surface, namely the end \({\mathcal {E}}S\) of S constructed above, and the hyperbolic end \({\mathcal {H}}\mathcal {M}S\) obtained by applying the extension functor of Sect. 3.3.5 to the Möbius surface \(\mathcal {M}S\). Furthermore, by Lemmas 3.3.23 and 3.3.24, \({\mathcal {E}}S\) naturally embeds into \({\mathcal {H}}\mathcal {M}S\) in such a manner that the levels of \({\mathcal {E}}S\) are mapped to graphs in \({\mathcal {H}}\mathcal {M}S\). Since e is smooth and ISC, a small modification of the proofs of these results extends this embedding to the boundary of \({\mathcal {E}}S\). In this manner, we obtain an embedding \(\tilde {e}\) of S into \({\mathcal {H}}\mathcal {M}S\) which factors the immersion e through the developing map \({\mathcal {H}}\mathcal {M}\phi _e\).
This construction allows us to apply the machinery of Sects. 3.2 and 3.3 to the study of quasicomplete ISC immersions. Given its utility, we first extend it as follows. Let (S, ϕ) be a simply connected Möbius surface and let \(({\mathcal {H}}S,{\mathcal {H}}\phi )\) denote its extension. Let Ω ⊆ S be an open subset and let e : Ω →ℍ3 be a quasicomplete ISC immersion whose Gauss map ϕe is equal to the restriction of ϕ to Ω. Let \(({\mathcal {E}}\Omega ,{\mathcal {E}} e)\) denote the end of ( Ω, e) and let \(\psi :{\mathcal {E}}\Omega \rightarrow {\mathcal {H}}S\) denote the unique injective morphism such that
As before, a small modification of the proof of Lemma 3.3.23 shows that ψ extends to a smooth embedding from the whole of \(\overline {{\mathcal {E}}\Omega }=\Omega \times [0,\infty [\) into \({\mathcal {H}}S\). We define the embedding \(\tilde {e}:S\rightarrow {\mathcal {H}}S\) by
and we call it the canonical lift of e. By (3.4.3), \(\tilde {e}\) factors e through \({\mathcal {H}}\phi \) in the sense that
Furthermore, an equally small modification of the proof of Lemma 3.3.24 then shows that the image of \(\tilde {e}\) is also a graph over Ω in \({\mathcal {H}}S\), and we denote by \({\mathrm {Ext}}(\tilde {e})\) the open subset of \({\mathcal {H}}S\) lying above this graph.
Let \({\mathrm {U}}^+{\mathcal {H}}S\) denote the bundle of upward-pointing unit vectors over \({\mathcal {H}}S\). As in Sect. 3.1.2, we define the horizon map\({\mathrm {Hor}}:{\mathrm {U}}^+{\mathcal {H}}S\rightarrow \partial _\infty {\mathcal {H}}S=S\) such that, for every unit speed geodesic ray \(\gamma :[0,\infty [\rightarrow {\mathcal {H}}S\) with \(\dot {\gamma }(0)={\mathrm {U}}^+{\mathcal {H}}S\),
This function is well-defined by Theorem 3.3.1. Let \(N_{\tilde {e}}:S\rightarrow {\mathrm {U}}^+{\mathcal {H}}S\) denote the positively-oriented unit normal vector field over \(\tilde {e}\). We define the asymptotic Gauss map of \(\tilde {e}\) by
so that \(\phi _{\tilde {e}}\) maps S into \(\partial _\infty {\mathcal {H}}S\).
Lemma 3.4.2
Let S be a developable Möbius surface of hyperbolic type with developing map ϕ and let\(({\mathcal {H}}S,{\mathcal {H}}\phi )\)denote its extension. Let Ω ⊆ S be an open subset and let e : Ω →ℍ3be a quasicomplete ISC immersion whose asymptotic Gauss map ϕeis equal to the restriction of ϕ to Ω. If\(\tilde {e}:\Omega \rightarrow {\mathcal {H}}S\)denotes the canonical lift of e, then its asymptotic Gauss map\(\phi _{\tilde {e}}\)satisfies
Proof
Indeed, let \(({\mathcal {E}}\Omega ,{\mathcal {E}} e)\) denote the end of ( Ω, e). Let \(\psi :\overline {{\mathcal {E}}\Omega }\rightarrow {\mathcal {H}}S\) denote the unique injective morphism such that \({\mathcal {H}}\phi \circ \psi ={\mathcal {E}} e\) and ∂∞ψ = Id. For all x ∈ S,
as desired. □
As a byproduct of the preceding construction, we obtain the following estimate for the Kulkarni–Pinkall metric of S in terms of the geometry of e.
Lemma 3.4.3
Let S be a developable Möbius surface with developing map ϕ and Kulkarni–Pinkall metric gϕ. Let Ω ⊆ S be an open subset and let e : Ω →ℍ3be a quasicomplete ISC immersion whose asymptotic Gauss map ϕeis equal to the restriction of ϕ to Ω. If Ie, IIeand IIIedenote respectively the first, second and third fundamental forms of e then, over Ω,
Remark 3.4.4
The right hand side of (3.4.10) is the none other than the horospherical metric studied by Schlenker in [22].
Proof
Let \(({\mathcal {H}}S,{\mathcal {H}}\phi )\) denote the extension of (S, ϕ). Let \(({\mathcal {E}}\Omega ,{\mathcal {E}} e)\) denote the end of ( Ω, e) and let h denote its height function. Let \(\psi :\overline {{\mathcal {E}}\Omega }\rightarrow {\mathcal {H}}S\) denote the unique injective morphism such that \({\mathcal {H}}\phi \circ \psi ={\mathcal {E}} e\) and ∂∞ψ = Id. Let x be a point of Ω. Let (H, α) denote the half space in \(\overline {{\mathcal {E}}\Omega }\) such that (x, 0) ∈ ∂α(H) and ∂t = ∇h(x) is the inward-pointing normal to this surface at this point. Denote P := ∂H and D := ∂∞H. Let g′ denote the Poincaré metric of D and let ϕ0 : P → D denote the asymptotic Gauss map of P. Observe that ϕ0 is an isometry from P into (D, g′).
Let Hor denote the horizon map of Uℍ3. Let Ne : S →Uℍ3 denote the positively-oriented unit normal vector field of S. Denote ν := Ne(x) and observe that, by the chain rule,
Recall now that TνUℍ3 decomposes as
where Vν is the vertical subspace and Hν is the horizontal subspace of the Levi–Civita covariant derivative. Recall furthermore that Dπ(ν) maps Hν isomorphically onto Tyℍ3 and that there exists a natural projection pν : Vν →〈ν〉⊥. We henceforth identify vectors in Hν and Vν with their respective images under Dπ(ν) and pν. With respect to the decomposition (3.4.11), for all ξ ∈ TxS,
where Ae here denotes the shape operator of e.
Since P is totally geodesic, for all ξ ∈〈ν〉⊥,
Using the fact that Hor restricts to a conformal diffeomorphism from Uyℍ3 into ∂∞ℍ3, we likewise show that, for all ξ ∈〈ν〉⊥,
Combining the above relations, it follows that, for all ξ ∈ TxS,
Since ϕ0 is an isometry, it follows that
However, by definition of the Kulkarni–Pinkall metric,
and the result follows. □
The proof of Lemma 3.4.3 also yields the following useful result.
Lemma 3.4.5
Let (S, e) be an immersed surface in ℍ3and let Ie, IIeand IIIedenote respectively its first, second and third fundamental forms. The asymptotic Gauss map ϕeof e is conformal with respect to the non-negative semi-definite bilinear form Ie + 2IIe + IIIe.
Proof
Indeed, this follows from (3.4.12) since, with the notation of the proof of Lemma 3.4.3, g′ is a conformal metric over D. □
3.4.2 A Priori Estimates
We are now ready to derive our main a priori estimates for quasicomplete ISC immersed surfaces in ℍ3. First, for every open half-space H in ℍ3, denote
Lemma 3.4.6
Let S be a developable Möbius surface with developing map ϕ. Let\(({\mathcal {H}}S,{\mathcal {H}}\phi )\)denote its extension, let (Di, αi)i ∈ Idenote its half-space decomposition and, for all i, let Hidenote the open half-space in ℍ3with ideal boundary Di. Let Ω be an open subset of S and let e : Ω →ℍ3be a quasicomplete ISC immersion whose asymptotic Gauss map ϕeis equal to the restriction of ϕ to Ω. Let\(\tilde {e}:\Omega \rightarrow {\mathcal {H}}S\)denote the canonical lift of e and let\({\mathrm {Ext}}(\tilde {e})\)denote the subset of\({\mathcal {H}}S\)lying above\(\tilde {e}(\Omega )\). For all r > 0, if the extrinsic curvature of e satisfies
then, for all i such that αi(Di) ⊆ Ω,
Proof
Let i be an element of I such that Di ⊆ Ω. Let j ∈ I be another element such that \(\overline {D}_j\subseteq D_i\) and \(\alpha _j=\alpha _i|{ }_{D_j}\). Since \(\tilde {e}(\Omega )\) is a graph over Ω, for sufficiently large s,
We claim that this holds for all s > tanh(r). Indeed, suppose the contrary, and let s0 > tanh(r) be the infimal value of s for which this relation holds. In particular, the surface \(\partial {\mathcal {H}}\alpha _j(H_{j,s_0})\) is an exterior tangent to \(\tilde {e}(\Omega )\) at some point. However, since \(\partial {\mathcal {H}}\alpha _j(H_{j,s_0})\) has constant extrinsic curvature equal to tanh(s0)2, this yields a contradiction by the geometric maximal principle. The result follows upon letting Dj tend to Di. □
Theorem 3.4.7
Let S be a developable Möbius surface with developing map ϕ. Let (Di, αi)i ∈ Idenote its Möbius disk decomposition and, for all i, let Hidenote the open half-space in ℍ3with ideal boundary Di. Let Ω be an open subset of S and let e : Ω →ℍ3be a quasicomplete ISC immersion whose asymptotic Gauss map ϕeis equal to the restriction of ϕ to Ω. For all r > 0, if the extrinsic curvature of e satisfies
then, for all x ∈ Ω and for all i ∈ I,
Proof
Let \(({\mathcal {H}}S,{\mathcal {H}}\phi )\) denote the extension of S, let \(({\mathcal {E}}\Omega ,{\mathcal {E}} e)\) denote the end of ( Ω, e), and let \(\psi :\overline {{\mathcal {E}}\Omega }\rightarrow {\mathcal {H}}S\) denote the unique injective morphism such that \({\mathcal {H}}\phi \circ \psi ={\mathcal {E}} e\) and ∂∞ψ = Id. Let x be a point of Ω, and let i be an element of I such that x ∈ αi(Di) ⊆ Ω. Define \(\gamma (t):={\mathcal {E}} e(x,t)\) and μ(t) := ψ(x, t), so that \(\gamma ={\mathcal {H}}\phi \circ \mu \). Observe that μ is the geodesic ray in \({\mathcal {H}}S\) normal to \(\tilde {e}(\Omega )\) at \(\tilde {e}(x)\). In particular,
Since, by Lemma 3.4.6, \(\tilde {e}(\Omega )\) lies outside \({\mathcal {H}}\alpha _i(H_{i,r})\), it follows by the intermediate value theorem that μ crosses \(\partial {\mathcal {H}}\alpha _i(H_{i,r})\) at some point. Furthermore, by convexity, μ crosses this surface transversally from the outside to the inside. Composing with \({\mathcal {H}}\phi \), it follows that γ crosses ∂Hi,r transversally from the outside to the inside at some point. However, since ∂Hi,r is strictly convex, γ can meet this surface no more than once, so that e(x) = γ(0) lies outside Hi,r, as desired. □
Theorem 3.4.8
Let S be a developable Möbius surface with developing map ϕ and Kulkarni–Pinkall form ωϕ. Let Ω be an open subset of S and let e : Ω →ℍ3be a quasicomplete ISC immersion whose asymptotic Gauss map ϕeis equal to the restriction of ϕ to Ω. For all x ∈ S,
where B here denotes the parametrisation of the space of open horoballs in ℍ3by Λ2∂∞ℍ3described in Sect.3.1.2.
Proof
Let \(({\mathcal {E}}\Omega ,{\mathcal {E}} e)\) denote the end of ( Ω, e). Observe that the level set foliation of \(({\mathcal {E}}\Omega ,{\mathcal {E}} e)\) is \((\Omega \times \left \{t\right \})_{t>0}\) so that every level of this hyperbolic end as well as its ideal boundary \(\partial _\infty {\mathcal {E}} \Omega \) naturally identifies with Ω. With respect to these identifications, \(\partial _\infty {\mathcal {E}} e=\phi \) and the vertical line projection \(\pi _\infty :{\mathcal {E}}\Omega \rightarrow \partial _\infty {\mathcal {E}}\Omega \) is given by π∞(x, t) = x. Thus, if ω denotes the Kulkarni–Pinkall form of ( Ω, ϕ) then, by Lemma 3.3.17, for all x ∈ Ω and for all t > 0,
However, by Lemma 3.2.6, ω ≥ ωϕ, so that, for all such x and t,
and the result now follows upon letting t tend to zero. □
3.4.3 Cheeger–Gromov Convergence
In order for the text to be as self-contained as possible, we now recall the basic theory of Cheeger–Gromov convergence. A pointed Riemannian manifold is a triplet (X, g, x), where X is a smooth manifold, g is a Riemannian metric and x is a point of X. We say that a sequence (Xm, gm, xm)m ∈ℕ of complete pointed Riemannian manifolds converges to the complete pointed Riemannian manifold (X∞, g∞, x∞) in the Cheeger–Gromov sense whenever there exists a sequence ( Φm)m ∈ℕ of functions such that
-
(1)
for all m, Φm : X∞→ Xm and Φm(x∞) = xm; and
for every relatively compact open subset Ω of X∞, there exists M such that
-
(2)
for all m ≥ M, the restriction of Φm to Ω defines a smooth diffeomorphism onto its image; and
-
(3)
the sequence (( Φm|Ω)∗gm)m≥M converges to g∞|Ω in the \(C^\infty _{\mathrm {loc}}\) sense.
We call ( Φm)m ∈ℕ a sequence of convergence maps of (Xm, gm, xm)m ∈ℕ with respect to (X∞, g∞, x∞).
At first sight, the concept of Cheeger–Gromov convergence can appear rather daunting and, indeed, its correct usage can be sometimes counterintuitive. However, it is reassuring to observe that it defines a Hausdorff topology over the space of isometry equivalence classes of complete pointed Riemannian manifolds.Footnote 4 Furthermore, although the convergence maps are trivially non-unique, any two sequences ( Φm)m ∈ℕ and \((\Phi _m^{\prime })_{m\in \Bbb {N}}\) of convergence maps are equivalent in the sense that there exists an isometry Ψ : X∞→ X∞ preserving x∞ such that, for any two relatively compact open subsets \(U\subseteq \overline {U}\subseteq V\) of X∞, there exists M such that
-
(1)
for all m ≥ M, the respective restrictions of Φm and \(\Phi _m^{\prime }\circ \Psi \) to U and V define smooth diffeomorphisms onto their images;
-
(2)
for all m ≥ M, \((\Phi _m^{\prime }\circ \Psi )(U)\subseteq \Phi _m(V)\); and
-
(3)
the sequence \(((\Phi _m|{ }_V)^{-1}\circ \Phi _m^{\prime }\circ \Psi )_{m\in \Bbb {N}}\) converges in the C∞ sense to the identity map over U.
The concept of Cheeger–Gromov convergence applies to sequences of immersed submanifolds as follows. We say that a sequence (Sm, xm, ϕm)m ∈ℕ of complete pointed immersed submanifolds in a complete Riemannian manifold (X, g) converges to the complete pointed immersed submanifold (S∞, x∞, ϕ∞) in the Cheeger–Gromov sense whenever \((S_m,x_m,\phi _m^*g)_{m\in \Bbb {N}}\) converges to \((S_\infty ,x_\infty ,\phi _\infty ^*g)\) in the Cheeger–Gromov sense and, for one, and therefore for any, sequence ( Φm)m ∈ℕ of convergence maps, the sequence (ϕm ∘ Φm)m ∈ℕ converges to ϕ∞ in the \(C^\infty _{\mathrm {loc}}\) sense.
Cheeger–Gromov convergence of immersed submanifolds can also be described in terms of graphs. Indeed, let NS∞ denote the normal bundle of (S∞, ϕ∞) in \(\phi _\infty ^*TX\). Recall that the exponential map of X defines a smooth function Exp : NS∞→ X. In particular, given a sufficiently small smooth section f : Ω → NS∞ defined over an open subset Ω of S∞, the composition Exp ∘ f defines a smooth immersion of Ω in X which we call the graph of f. It is straightforward to show that if the sequence (Sm, xm, ϕm)m ∈ℕ converges to (S∞, x∞, ϕ∞) in the Cheeger–Gromov sense, then there exists a sequence \((x_m^{\prime })_{m\in \Bbb {N}}\) of points in S∞ and sequences of functions (fm)m ∈ℕ and (αm)m ∈ℕ such that
-
(1)
\((x_m^{\prime })_{m\in \Bbb {N}}\) converges to x∞;
-
(2)
for all m, fm maps S∞ into NS∞, αm maps S∞ into Sm and \(\alpha _m(x_m^{\prime })=x_m\); and
for every relatively compact open subset Ω of S∞, there exists M such that
-
(3)
for all m ≥ M, fm restricts to a smooth section of NS∞ over Ω, αm restricts to a smooth diffeomorphism of Ω onto its image, and
$$\displaystyle \begin{aligned} {\mathrm{Exp}}\circ f_m|{}_\Omega = \phi_m\circ\alpha_m|{}_\Omega;\ \text{and} \end{aligned}$$ -
(4)
the sequence (fm)m≥M tends to zero in the \(C_{\mathrm {loc}}^\infty \) sense.
Finally, these definitions are readily extended in a number of ways. For example, in the case of a sequence (Xm, gm, xm)m ∈ℕ of pointed Riemannian manifolds, the hypothesis of completeness is unnecessary. Instead, it is sufficient to assume that for all R > 0, there exists M such that, for all m ≥ M, the closed ball of radius R about xm in (Xm, gm) is compact. Likewise, in the case of immersed submanifolds, the target space can be replaced with a sequence (Xm, gm, xm)m ∈ℕ of pointed Riemannian manifolds converging in the Cheeger–Gromov sense to some complete pointed Riemannian manifold. Furthermore, it is not necessary to suppose that the Riemannian manifolds in this sequence are complete, and so on.
3.4.4 Labourie’s Theorems and Their Applications
For k > 0, we define a k-surface to be a quasicomplete ISC immersed surface in ℍ3 of constant extrinsic curvature equal to k. Let (S, e) be a k-surface in ℍ3. Let Ne denote its positively-oriented unit normal vector field. Observe that, if Ie and IIIe denote respectively the first and third fundamental forms of e, then Ie + IIIe is uniformly equivalent to the pull-back through Ne of the Sasaki metric of Uℍ3 so that, by quasicompleteness, Ne is actually a complete immersion of S in Uℍ3. In order to emphasise our interest in this function as an immersion rather than as a vector field, following Labourie, we denote \(\hat {e}:=N_e\) and we call \(\hat {e}\) the Gauss lift of e. In [18], Labourie proves the following result (see also [28]).
Theorem 3.4.9 (Labourie’s Compactness Theorem)
Choose k > 0. Let (Sm, em, xm)m ∈ℕbe a sequence of pointed k-surfaces in ℍ3. For all m, let\(\hat {e}_m:S_m\rightarrow {\mathrm {U}}\Bbb {H}^3\)denote the Gauss lift of em. If\((\hat {e}_m(x_m))_{m\in \Bbb {N}}\)remains within a compact subset of Uℍ3then there exists a complete, pointed immersed surface\((S_\infty ,\hat {e}_\infty ,x_\infty )\)in Uℍ3towards which\((S_m,\hat {e}_m,x_m)_{m\in \Bbb {N}}\)subconverges in the Cheeger–Gromov sense.
Significantly, Theorem 3.4.9 does not affirm that the limit is a lift of some k-surface. In order to address this, Labourie introduces what he calls curtain surfaces, which are defined as follows. Given a complete geodesic Γ in ℍ3, we denote by N Γ ⊆ Uℍ3 the set of unit normal vectors over Γ. Observe that N Γ is an immersed surface conformally equivalent to 𝕊1 ×ℝ with respect to the Sasaki metric of Uℍ3. We define a curtain surface to be any immersed surface \((S,\hat {e})\) in Uℍ3 which is a cover of N Γ, for some complete geodesic Γ.
Theorem 3.4.10 (Labourie’s Dichotomy)
Choose k > 0. Let\((S_\infty ,\hat {e}_\infty )\)be a limit of a sequence of lifts of k-surfaces, as in Theorem3.4.9. If\((S_\infty ,\hat {e}_\infty )\)is not a curtain surface, then\((S_\infty ,\pi \circ \hat {e}_\infty )\)is a k-surface.
The phenomenon described in Theorem 3.4.10 is best illustrated by the case where k = 1. Indeed, by a theorem of Volkov–Vladimirova and Sasaki (see Theorem 46 of [29]), the only 1-surfaces in ℍ3 are the horospheres and covers of equidistant cylinders around complete geodesics.Footnote 5 Let Γ be a complete geodesic in ℍ3. For all r > 0, let Cr denote the cylinder of radius r about Γ. For all m, let em : ℝ2 → C1∕m be a covering map which is isometric with respect to the sum of its first and third fundamental forms. The sequence (ℝ2, em, 0)m ∈ℕ subconverges in the \(C^\infty _{\mathrm {loc}}\) sense to a smooth function e∞ : ℝ2 → Γ. Consequently, viewed as a sequence of pointed immersed surfaces, this sequence degenerates. However, the sequence \((\Bbb {R}^2,\hat {e}_m,0)_{m\in \Bbb {N}}\) of Gauss lifts converges in the \(C^\infty _{\mathrm {loc}}\) sense to a cover of N Γ, that is, a curtain surface. Labourie’s dichotomy affirms that, even in the general case, this is the only mode of degeneration that can occur.
We now prove one of the main results of this chapter.
Theorem 3.4.11 (Monotone Convergence)
Let S be a developable Möbius surface of hyperbolic type with universal cover not isomorphic to (ℂ, Exp(z)). Let ϕ be a developing map of S. Let ( Ωm)m ∈ℕbe a nested sequence of open subsets of S which exhausts S. For k > 0 and for all m, let em : Ωm →ℍ3be a k-surface whose Gauss map ϕmis equal to the restriction of ϕ to Ω. There exists a k-surface e∞ : S →ℍ3towards which (em)m ∈ℕsubconverges in the\(C^\infty _{\mathrm {loc}}\)sense over S.
Proof
For all m, let \(\hat {e}_m\) denote the Gauss lift of em. Let ωϕ denote the Kulkarni–Pinkall form of S. Let x be a point of S. We claim that there exists a Möbius disk (D, α) in S such that x ∈ α(D) and \((\hat {e}_m\circ \alpha )_{m\in \Bbb {N}}\) subconverges in the \(C^\infty _{\mathrm {loc}}\) sense. Indeed, let (D′, α′) be a Möbius disk in S such that x ∈ α′(D′) and the closure of α′(D′) in S is compact. By Theorems 3.4.7 and 3.4.8, for all sufficiently large m,
where H′ here denotes the open half-space in ℍ3 with ideal boundary D′ and \(r:={\mathrm {arctanh}}(\sqrt {k})\). Since K is compact, it follows by Theorem 3.4.9 that there exists a complete pointed immersed surface \((S_\infty ,\hat {e}_\infty ,x_\infty )\) in Uℍ3 towards which \((\Omega _m,\hat {e}_m,x)_{m\in \Bbb {N}}\) subconverges in the Cheeger–Gromov sense. Denote
where Hor here denotes the horizon map of Uℍ3. Since ϕ∞ is a local diffeomorphism from S into ∂∞ℍ3, it defines a developable Möbius structure over S∞. Let ( Φm)m ∈ℕ be a sequence of convergence maps of \((\Omega _m,\hat {e}_m,x)_{m\in \Bbb {N}}\) with respect to \((S_\infty ,\hat {e}_\infty ,x_\infty )\). Let (D″, α″) be a Möbius disk about x∞ in (S∞, ϕ∞) such that α″(D″) is relatively compact in S∞. Let M be such that, for all m ≥ M, Φm restricts to a smooth diffeomorphism from α″(D″) onto an open subset Um of S. Since (ϕm ∘ Φm ∘ α″)m≥M converges in the \(C^\infty _{\mathrm {loc}}\) sense over D″ to (ϕ∞∘ α″) = Id, upon increasing M and reducing D″ if necessary, we may suppose that, for all m ≥ M, (ϕm ∘ Φm ∘ α″) is a diffeomorphism onto its image Ωm whose inverse we denote by βm. Let D be another disk with closure contained in D″ such that x∞∈ α″(D). For sufficiently large m, Ωm contains D and we therefore define αm : D → S by αm := ( Φm ∘ α″ ∘ βm). For all such m, (D, αm) is in fact a Möbius disk in (S, ϕ) and, upon increasing m further if necessary, we may suppose in addition that αm(Dm) contains x. It then follows that αm is independent of m, and we therefore denote α := αm. By construction \((\hat {e}_m\circ \alpha )_{m\geq M}\) subconverges to \((\hat {e}_\infty \circ \alpha '')\), and (D, α) is therefore the desired Möbius disk.
A diagonal argument now shows that \((\hat {e}_m)_{m\in \Bbb {N}}\) subconverges in the \(C^\infty _{\mathrm {loc}}\) sense to a smooth immersion \(\hat {e}_\infty :S\rightarrow {\mathrm {U}}\Bbb {H}^3\) satisfying
We now claim that \(\hat {e}_\infty \) is complete. Indeed, for all m ∈ℕ, if Im, IIm and IIIm denote respectively the first, second and third fundamental forms of em, then, by Lemma 3.4.3,
where gϕ here denotes the Kulkarni–Pinkall metric of (S, ϕ). However, for all m, Im + IIIm is also the metric of \(\hat {e}_m\). It follows upon taking limits that the metric of \(\hat {e}_\infty \) is bounded below by gϕ. However, by Lemma 3.2.15, gϕ is complete, and therefore so too is \(\hat {e}_\infty \), as asserted. Finally, by Labourie’s dichotomy, either \(e_\infty :=\pi \circ \hat {e}_\infty \) is a k-surface, or \(\hat {e}_\infty \) is a curtain surface. Since the latter can only occur when (S, ϕ) is isomorphic to a cover of (ℂ∗, z), that is, when its universal cover is isomorphic to (ℂ, Exp(z)), it follows that e∞ is a k-surface, and this completes the proof. □
3.4.5 Uniqueness and Existence
We are now ready to prove the main result of this chapter. Before proceeding, we require the following technical lemma.
Lemma 3.4.12
Let (S, e) be an ISC immersion in ℍ3and let\(\hat {e}:S\rightarrow {\mathrm {U}}\Bbb {H}^3\)denote its Gauss lift. If, for 0 < k < 1, e has constant extrinsic curvature equal to k then, for all t > 0, the immersion\(e_t(x):={\mathrm {Exp}}(t\hat {e}(x))\)has curvature at every point strictly greater than k and strictly less than 1.
Proof
Indeed, by the tube formula (see [12]), the shape operator At of et solves
Thus, denoting Ht := Tr(At) and Kt := Det(At), we have
Solving this ordinary differential equation with K0 = k < 1 yields, for all t > 0,
as desired. □
The following result is proven by Labourie in [19]. Since its proof fits into the framework developed in this chapter, we include it for completeness.
Theorem 3.4.13 (Monotonicity)
Let S be a developable Möbius surface with developing map ϕ and let\(({\mathcal {H}}S,{\mathcal {H}}\phi )\)denote its extension. For 0 < k < 1, and for\(i\in \left \{1,2\right \}\), let Ωi ⊆ S be an open subset of S, let ei : Ωi →ℍ3be a k-surface whose asymptotic Gauss map ϕiis equal to the restriction of ϕ to Ωi, and for each i, let\(\tilde {e}_i:\Omega _i\rightarrow {\mathcal {H}}S\)denote the canonical lift of ei. If Ω1 ⊆ Ω2then\({\mathrm {Ext}}(\tilde {e}_1)\subseteq {\mathrm {Ext}}(\tilde {e}_2)\).
Proof
Suppose the contrary. Let U denote the set of all points in Ω1 whose image under \(\tilde {e}_1\) lies in the complement of the closure of \(\text{Ext}(\tilde {e}_2)\). For each i, let \(({\mathcal {E}}\Omega _i,{\mathcal {E}} e_i)\) denote the end of ( Ωi, ei) and let \(\psi _i:\overline {{\mathcal {E}}\Omega }_i\rightarrow {\mathcal {H}}S\) denote the unique injective morphism such that \({\mathcal {H}}\phi \circ \psi _i={\mathcal {E}} e_i\) and ∂∞ψi = Id. Denote \(r:={\mathrm {arctan}}(\sqrt {k})\). We claim that there exists a unique smooth function f : U → [0, r] and a unique function α : U → Ω2 such that α is a diffeomorphism onto its image and, for all x ∈ U,
Indeed, let x be a point of U. Let (H, α) denote the unique half space in \(\overline {{\mathcal {E}}\Omega }_1\) such that (x, 0) ∈ ∂α(H) and let D denote the ideal boundary of H. (H, ψ1 ∘ α) is the unique half-space in \({\mathcal {H}}S\) which is tangent to \(\tilde {e}_1(\Omega )\) at \(\tilde {e}_1(x)\). Since
it follows by Lemma 3.4.6 that
In particular, for all t > r,
We define f(x) to be the infimal value of t such that \(\psi _1(x,t)\in \tilde {e}_2(\Omega _2)\). By Theorem 3.3.1, this is the only value of t such that \(\psi _1(x,t)\in \tilde {e}_2(\Omega _2)\). Since, by convexity, the geodesic t↦ψ1(x, t) is transverse to \(\tilde {e}_2(\Omega _2)\) at this point, it follows that f is smooth. The existence of α now follows from the fact that \(\tilde {e}_2\) is an embedding, and this proves the assertion.
We now apply a maximum principle at infinity to obtain a contradiction. Let (xm)m ∈ℕ be a sequence in U such that
and, for all m, denote ym := α(xm). Let p be a fixed point of ℍ3. For all m, let βm be an isometry of ℍ3 such that βm(e1(xm)) = p and, for each i, denote ei,m := αm ∘ ei and let \(\hat {e}_{i,m}\) denote its Gauss lift. By Theorem 3.4.9, we may suppose that there exist pointed immersions \((S_{1,\infty },\hat {e}_{1,\infty },x_\infty )\) and \((S_{2,\infty },\hat {e}_{2,\infty },y_\infty )\) towards which \((\Omega _1,\hat {e}_{1,m},x_m)_{m\in \Bbb {N}}\) and \((\Omega _2,\hat {e}_{2,m},y_m)_{m\in \Bbb {N}}\) subconverge in the Cheeger–Gromov sense. Observe that there exist neighbourhoods U of x∞ in S1,∞, V of y∞ in S2,∞, a smooth diffeomorphism α : U → V and a smooth function f : U → [0, r] such that α(x∞) = y∞, f attains its maximum value of f0 at x∞ and, for all z ∈ U,
We now show that this is absurd. Define e1,∞ : S2,∞→ℍ3 by \(e_{1,\infty }(z):={\mathrm {Exp}}(f_0\hat {e}_{1,\infty })\). We claim that the extrinsic curvature of this immersion is at every point strictly greater than k. Indeed, there are two cases to consider. If \(\hat {e}_{1,\infty }\) is a curtain surface, then \(e_1^{\prime }\) is a cylinder of radius f0 about a complete geodesic in ℍ3 and thus has constant extrinsic curvature equal to 1. On the other hand, if e1,∞ is the lift of a k-surface, then, by Lemma 3.4.12, \(\hat {e}_1^{\prime }\) also has extrinsic curvature at every point strictly greater than k, and the assertion follows. We now examine the function \(e_{2,\infty }:=\pi \circ \hat {e}_{2,\infty }\). Once again, there are two cases to consider. If \(\hat {e}_{2,\infty }\) is a curtain surface, then e2,∞(S2,∞) is a complete geodesic Γ in ℍ3 which, by (3.4.19), is an interior tangent to e1,∞ at e1,∞(x∞). By convexity, this is absurd. Otherwise, e2,∞ is a k-surface which is an interior tangent to e1,∞ at e1,∞(x∞), which is also absurd by the geometric maximum principle. We thus obtain a contradiction in all cases, and this completes the proof. □
Theorem 3.4.13 is useful for studying the geometry of k-surfaces in ℍ3. In the present section, when Ω1 = Ω2, it yields uniqueness.
Theorem 3.4.14
For all 0 < k < 1 and for every developable Möbius surface S with developing map ϕ, there exists at most one k-surface e : S →ℍ3such that ϕe = ϕ.
Proof
Indeed, let e, e′ : S →ℍ3 be k-surfaces such that \(\phi _e=\phi _{e'}=\phi \). Let \(({\mathcal {H}}S,{\mathcal {H}}\phi )\) denote the extension of (S, ϕ). Let \(\tilde {e},\tilde {e}':S\rightarrow {\mathcal {H}}S\) denote the respective canonical lifts of e and e′. By Theorem 3.4.13, \(\tilde {e}(S)=\tilde {e}'(S)\). From this it follows that \(\tilde {e}=\tilde {e}'\) and so e = e′, as desired. □
The following result is proven by Labourie in [19].
Theorem 3.4.15
Let S be a developable Möbius surface with developing map ϕ. Let Ω be a relatively compact open subset of S with smooth boundary. For all 0 < k < 1, there exists a k-surface e : Ω →ℍ3such that ϕe = ϕ|Ω.
Sketch of Proof
Labourie’s result holds for asymptotic Plateau problems in Cartan-Hadamard manifolds of bounded geometry. For the reader’s convenience, we sketch a simpler proof valid for the hyperbolic case studied here. First, using the Beltrami–Klein model we identify ℍ3 with the unit ball in ℝ3. For all r ∈ ]0, 1[, let \(\overline {B}_r\) denote the closed ball of (Euclidean) radius r about the origin, let \(S_r:=\partial \overline {B}_r\) denote its boundary, let πr : ∂∞ℍ3 → Sr denote the canonical projection, and denote ϕr := πr ∘ ϕ. For all r, the argument used in [13] and [32] applies equally well in the hyperbolic case to prove the existence of an ISC immersion er : Ω → Br, isotopic through ISC immersions to ϕr, of constant extrinsic curvature equal to k and whose restriction to ∂ Ω coincides with ϕr (c.f. Theorem 1.2 of [25]). Reasoning as in [32], we then show that (er)r>0 subconverges to a complete, locally Lipschitz immersion e∞ : Ω →ℍ3, of constant extrinsic curvature equal to k in the viscosity sense, and solving the asymptotic Plateau problem ( Ω, ϕ). Finally, since ( Ω, e∞) is not a tube, the arguments of Sect. 3.4.4, allow us to show that this sequence in fact converges in the \(C^\infty _{\mathrm {loc}}\) sense, so that e∞ is smooth, and the result follows. □
We now obtain our main existence result.
Theorem 3.4.16
Let S be a developable Möbius surface of hyperbolic type with developing map ϕ. If the universal cover of S is not isomorphic to (ℂ, Exp(z)), then for all 0 < k < 1, there exists a unique k-surface e : S →ℍ3such that ϕe = ϕ.
Remark 3.4.17
Recall that the hypothesis that S be of hyperbolic type is equivalent to excluding the possibility that the universal cover of S be equivalent to \((\hat {\Bbb {C}},z)\) or (ℂ, z).
Proof
Let ( Ωm)m ∈ℕ be a nested sequence of relatively compact open subsets of S with smooth boundary which exhausts S. By Theorem 3.4.15, for all m, there exists a k-surface em : Ωm →ℍ3 such that \(\phi _{e_m}=\phi |{ }_{\Omega _m}\). By Theorem 3.4.11, there exists a k-surface e : S →ℍ3 towards which (em)m ∈ℕ subconverges in the \(C^\infty _{\mathrm {loc}}\) sense. Uniqueness follows by Theorem 3.4.14, and this completes the proof. □
We conclude by proving the results of Sect. 3.1.3.
Theorem 3.4.18
For all 0 < k < 1 and for all f ∈Hol(𝔻), there exists a unique element e ∈Immk(𝔻) such that
Furthermore, e depends continuously on f. In other words, Σ defines a homeomorphism from Immk(𝔻) into Hol(𝔻).
Proof
It suffices to construct a continuous inverse of Σ. Let \({\mathrm {C}\widetilde {\mathrm {on}}\mathrm {f}}(\Bbb {D})\) denote the space of locally conformal functions from 𝔻 into \(\hat {\Bbb {C}}\) furnished with the \(C^0_{\mathrm {loc}}\) topology. Let Conf(𝔻) denote the quotient of this space under the action of post-composition by Möbius maps. Now choose f ∈Hol(𝔻). By Theorem 1.1 of Section 2 of [20], there exists an element \(\phi :=\tilde {A}f\in {\mathrm {C}\widetilde {\mathrm {on}}\mathrm {f}}(\Bbb {D})\) with Schwarzian derivative equal to f. Furthermore, ϕ is unique up to post-composition by Möbius maps, and its equivalence class in Conf(𝔻) varies continuously with f. \(\tilde {A}\) thus defines a continuous map from Hol(𝔻) into Conf(𝔻) which we denote by A. Now let ϕ be an element of \({\mathrm {C}\widetilde {\mathrm {on}}\mathrm {f}}(\Bbb {D})\). Since the developed Möbius surface (𝔻, ϕ) is not of any of the exceptional types, it follows by Theorem 3.4.16, that there exists a unique k-surface e := Bϕ : 𝔻 →ℍ3 such that ϕe = ϕ. Trivially, for any element α ∈PSO(3, 1),
so that B descends to a map from Conf(𝔻) into Immk(𝔻). We readily verify that BA inverts Σ. Finally, by Theorem 1.5 of [26], B is continuous, and therefore so too is BA. This completes the proof. □
Theorem 3.4.19
For all 0 < k < 1 and for all f ∈Hol(ℂ) ∖ℂ, there exists a unique element e ∈Immk(ℂ) such that
Proof
The proof is identical to that of Theorem 3.4.18 with two modifications. First, the developed Möbius surface (ℂ, ϕ) is equivalent to (ℂ, ez) if and only if the Schwarzian derivative of ϕ is a non-zero constant, and it is equivalent to (ℂ, z) if and only its Schwarzian derivative vanishes. Second, since Theorem 1.5 of [30] does not apply in this case, continuity of the inverse of Σ remains unproven. □
Notes
- 1.
The extension coincides with the hyperbolic end constructed by Kulkarni–Pinkall in Section 8 of [17], where it is called the H-hull of the Möbius surface.
- 2.
In fact, it is not necessary for the immersed surface to be infinitesimally strictly convex for its asymptotic Gauss map to be a local diffeomorphism. It is instead sufficient that both of its principal curvatures be different to − 1. The properties of surfaces which satisfy this condition are studied in [8, 22].
- 3.
- 4.
Strictly speaking, of course, the family of all complete pointed Riemannian manifolds is not a set. However, by Whitney’s theorem, we restrict attention to the family of submanifolds of ℝm, for some m, with smooth complete metrics defined over them, which is a set.
- 5.
We refer the reader to Footnote 4 of Sect. 3.1.3.
References
L. Andersson, T. Barbot, F. Béguin, A. Zeghib, Cosmological time versus CMC time in spacetimes of constant curvature. Asian J. Math. 16(2), 37–87 (2012)
W. Ballmann, M. Gromov, V. Schroeder, Manifolds of Nonpositive Curvature. Progress in Mathematics, vol. 61 (Birkhäuser, Boston, 1985)
E. Calabi, I. An extension of E. Hopf’s maximum principle with an application to Riemannian geometry. Duke Math. J. 25(1), 45–56 (1958)
G. Calsamiglia, B. Deroin, S. Francaviglia, Branched projective structures with Fuchsian holonomy. Geom. Topo. 18, 379–446 (2014)
R.D. Canary, D. Epstein, A. Marden, Fundamentals of Hyperbolic Geometry (Cambridge University Press, Cambridge, 2006)
I. Chavel, Riemannian Geometry, A Modern Introduction (Cambridge University Press, Cambridge, 1994)
D. Dumas, Complex projective structures, in Handbook of Teichmüller theory. Vol. II, ed. by A. Papadopoulos (Eur. Math. Soc., Zürich, 2009), pp. 455–508
J.M. Espinar, J.A. Gálvez, P. Mira, Hypersurfaces in ℍn+1 and conformally invariant equations: the generalized Christoffel and Nirenberg problems. J. Eur. Math. Soc. 11, 903–939 (2009)
F. Fillastre, G. Smith, Group actions and scattering problems in Teichmüller theory, in Handbook of Group Actions IV, ed. by L. Ji, A. Papadopoulos, S.-T. Yau. Advanced Lectures in Mathematics, vol. 40 (International Press, Boston, 2018), pp. 359–417
D. Gallo, M. Kapovich, A. Marden, The monodromy groups of Schwarzian equations on closed Riemann surfaces. Ann. Math. 151(2), 625–704 (2000)
W.M. Goldman, Projective structures with Fuchsian holonomy. J. Differ. Geom. 25(3), 297–326 (1987)
M. Gromov, Sign and geometric meaning of curvature. Rend. Sem. Mat. Fis. Milano 61, 9–123 (1991)
B. Guan, J. Spruck, The existence of hypersurfaces of constant Gauss curvature with prescribed boundary. J. Differ. Geom. 62(2), 259–287 (2002)
J.H. Hubbard, Teichmüller Theory and Applications to Geometry, Topology and Dynamics, Vol. I, Teichmüller Theory (Matrix Editions, Ithaca, 2006)
M. Kapovich, Hyperbolic Manifolds and Discrete Groups (Birkhaüser, Boston, 2010)
R.S. Kulkarni, Conformal structures and Möbius structures, in Conformal Geometry. Aspects of Mathematics (MPIM, Bonn, 1988)
R.S. Kulkarni, U. Pinkall, A canonical metric for Mb̈ius structures and its applications. Math. Zeit. 216(1), 89–129 (1994)
F. Labourie, Problèmes de Monge-Ampère, courbes holomorphes et laminations. Geom. Funct. Anal. 7(3), 496–534 (1997)
F. Labourie, Un lemme de Morse pour les surfaces convexes. Invent. Math. 141, 239–297 (2000)
O. Lehto, Univalent Functions and Teichmüller Spaces (Springer, Berlin, 1990)
K.P. Scannell, Flat conformal structures and the classification of de Sitter manifolds. Comm. Anal. Geom. 7(2), (1999), 325–345
J.M. Schlenker, Hypersurfaces in ℍn and the space of its horospheres. Geom. Funct. Anal. 12, 395–435 (2002)
G. Smith, Pointed k-surfaces. Bull. Soc. Math. France 134(4), 509–557 (2006)
G. Smith, Moduli of flat conformal structures of hyperbolic type. Geom. Dedicata 154(1), 47–80 (2011)
G. Smith, Compactness results for immersions of prescribed Gaussian curvature I - analytic aspects. Adv. Math. 229(2), 731–769 (2012)
G. Smith, Hyperbolic Plateau problems. Geom. Dedicata 176(1), 31–44 (2014)
G. Smith, Global Singularity Theory for the Gauss Curvature Equation. Ensaios Matemáticos, vol. 28 (Sociedade Brasileira De Matemática, Rio de Janeiro, 2015), pp. 1–114
G. Smith, k-surfaces and quaternionic structures (in preparation)
M. Spivak, A Comprehensive Introduction to Differential Geometry, Vol IV (Publish or Perish Inc., Berkeley, 1979)
W.P. Thurston, Three dimensional manifolds, Kleinian groups and hyperbolic geometry. Bull. Am. Mat. Soc. 6(3), 357–381 (1982)
W.P. Thurston, The geometry and topology of three-manifolds (MSRI, Berkeley, 2002)
N.S. Trudinger, X.J. Wang, On locally convex hypersurfaces with boundary. J. Reine Angew. Math. 551, 11–32 (2002)
Author information
Authors and Affiliations
Editor information
Editors and Affiliations
Appendices
Appendix A: A Non-complete k-Surface
In this appendix, we describe a non-complete k-surface. We leave the reader to provide the complete proofs of the statements made in what follows. Consider the holomorphic function
This is the Schwarzian derivative of the function
For 0 < k < 1, let \(\tilde {e}_k:\Bbb {C}\rightarrow \Bbb {H}^3\) denote the unique k-surface solving the asymptotic Plateau problem \((\Bbb {C},\tilde {\phi })\). By uniqueness, for all k ∈ℤ,
so that \(\tilde {e}_k\) descends to a unique k-surface ek : ℂ∗→ℍ3 such that, for all z ∈ℂ,
This k-surface solves the Plateau problem (ℂ∗, Exp(z)).
We now identify \(\hat {\Bbb {C}}\) with ∂∞ℍ3. In [23], we show that ek has a cusp at 0 whose end point in \(\partial _\infty \Bbb {H}^3=\hat {\Bbb {C}}\) is 1. We now study the asymptotic geometry of ek(z) as z tends to infinity in ℂ∗. Let Γ denote the geodesic in ℍ3 joining 0 and ∞. For all y ∈ℝ, denote
The image of Ly under ek converges exponentially fast to a constant speed parametrisation of Γ as y tends to ±∞. On the other hand, the image of Ly under Exp is a complete radial line rotating at constant speed as y varies. Since, by definition, Exp is the asymptotic Gauss map of ek, we see that ek wraps around Γ, ever tighter, infinitely many times as y tends to ±∞.
We now use a heuristic argument to show that ek is not complete. By Theorem 3.4.11, ek is the limit as m tends to infinity of the solution em,k of the asymptotic Plateau problem (ℂ ∖ 2mπiℤ, Exp(z)). However, by uniqueness, for all m, em,k is 2mπ periodic in the y direction with fundamental domain
In particular, for all m, the resulting quotient surface has the conformal type of \(\hat {\Bbb {C}}\setminus \left \{0,1,\infty \right \}\) and, by the Gauss–Bonnet Theorem, its metric has area 2π∕(1 − k). Since this area is independent of m, upon letting m tend to infinity, it is reasonable to expect that the area induced over ℂ∗ by ek is also equal to 2π∕(1 − k). In particular, since ek has the topology of a pointed disk, it cannot be complete, for there is no hyperbolic surface with finite area, vanishing genus and two cusps. In fact, we expect the metric induced by ek over ℂ∗ to be, up to rescaling, isometric to the surface
whose fundamental domain is shown in Fig. 3.5.
Appendix B: Category Theory
Our presentation has been structured around the framework of category theory. For didactic purposes, we provide here an elementary and low-level discussion of its basic definitions.
A category consists of
-
(1)
a family \(\mathcal {A}\) of mathematical objects;
-
(2)
for any two objects X and Y of \(\mathcal {A}\), a set Mor(X, Y ), which we call the morphisms from X to Y ; and
-
(3)
for any three objects X, Y and Z in \(\mathcal {A}\), a function
$$\displaystyle \begin{aligned} \circ:{\mathrm{Mor}}(X,Y)\times{\mathrm{Mor}}(Y,Z)\rightarrow{\mathrm{Mor}}(X,Z),{} \end{aligned} $$(B.1)which we call composition,
such that
-
(4)
for any object X of \(\mathcal {A}\), there exists a unique element e ∈Mor(X, X), which we call the identity, such that for any other object Y of \(\mathcal {A}\), and for all f ∈Mor(X, Y ),
$$\displaystyle \begin{aligned} e\circ f = f, \end{aligned} $$(B.2)whilst, for all f ∈Mor(Y, X),
$$\displaystyle \begin{aligned} f\circ e = f; and \end{aligned} $$(B.3) -
(5)
for any four objects X, Y , Z and W of \(\mathcal {A}\), for all α ∈Mor(X, Y ), β ∈Mor(Y, Z) and γ ∈Mor(Z, W),
$$\displaystyle \begin{aligned} \alpha\circ(\beta\circ\gamma) = (\alpha\circ\beta)\circ\gamma.{} \end{aligned} $$(B.4)
It is crucial at this stage to pay close attention to the semantics of these definitions. A family is not a set. In fact, there is an implicit abuse of language in the concept of family: a family is a list of axioms which can be written down. Likewise, an object of a family is not an element of a set: it is a mathematical object which satisfies the axioms of the family. Thus, the family of groups is given by the axioms of group theory; the family of vector spaces is given by the axioms of linear algebra; and so on.
Most familiar mathematical constructs lie within this framework. For example, the category of vector spaces is the category whose objects are vector spaces and whose morphisms are linear maps; the category of Banach spaces is a category whose morphisms are bounded linear maps; the category of smooth manifolds is a category whose morphisms are smooth maps; and so on. It should hopefully become clear that in defining new mathematical objects, it is indeed often desirable to identify their morphisms and to verify whether these morphisms include identity elements and compose associatively. It is in this sense that the above axioms constitute a check-list of properties that families of mathematical objects ought to possess.
A (covariant) functor\(\mathcal {F}\) between two categories \(\mathcal {A}\) and \(\mathcal {B}\) consists of
-
(1)
a mathematical operation that associates to every object X of \(\mathcal {A}\) an object \(\mathcal {F}(X)\) of \(\mathcal {B}\); and
-
(2)
another mathematical operation which associates to every pair X and Y of objects of \(\mathcal {A}\) and to every morphism α in Mor(X, Y ) a morphism \(\mathcal {F}(\alpha )\) in Mor(α(X), α(Y )),
such that
-
(3)
for any object X of \(\mathcal {A}\),
$$\displaystyle \begin{aligned} \mathcal{F}(e) = e;\ \text{and}{} \end{aligned} $$(B.5) -
(4)
for any three objects X, Y and Z of \(\mathcal {A}\), for all α ∈Mor(X, Y ) and for all β ∈Mor(Y, Z),
$$\displaystyle \begin{aligned} \mathcal{F}(\beta\circ\alpha) = \mathcal{F}(\beta)\circ\mathcal{F}(\alpha).{} \end{aligned} $$(B.6)
Condition (4) can also be replaced with the condition that
in which case the functor is said to be contravariant. However, although the simplest examples of functors are often contravariant, only covariant functors will be used in this chapter.
As before, it is crucial to pay close attention to the semantics of these definitions. A functor is not a function: it is a list of mathematical operations which can be written down. For example, the dual operation, which associates to every vector space its dual vector space is a contravariant functor from the category of vector spaces to itself; the C∞ operation, which associates to every smooth manifold the vector space of smooth functions defined over that manifold, is a contravariant functor from the category of smooth manifolds to the category of vector spaces; and so on. Once again, it should hopefully become clear that in defining new mathematical operations between families of objects, it is often desirable to know their effects on morphisms so that the above axioms again provide a check-list of properties that such operations ought to possess.
For those of us trained to express our ideas in terms of sets and functions, this formalism can appear at first quite unsettling. However, the concepts of category theory are, ironically, less abstract than those of set theory and closer to what we have in mind when mathematical operations are performed. To see this, recall that sets are actually abstract mathematical objects which are not necessarily constructible in any sense that we would normally understand, which is precisely what gives the mystery to such results as the Banach–Tarski paradox. Families, on the other hand, are clearly defined by fixed lists of axioms which can be written down. Likewise, functions are abstract objects of set theory which are also not necessarily constructible in any sense that we would normally understand, whilst functors are fixed lists of mathematical operations which can again be written down. In fact, whenever we carry out explicit calculations, we never work with functions, but rather with the sequences of operations used to define them. Such sequences, which we regularly encounter in our day-to-day mathematical life, are, in fact, closer in kind to the functors of category theory than they are to the functions of set theory.
Rights and permissions
Copyright information
© 2022 The Author(s), under exclusive license to Springer Nature Switzerland AG
About this chapter

Cite this chapter
Smith, G. (2022). Möbius Structures, Hyperbolic Ends and k-Surfaces in Hyperbolic Space. In: Ohshika, K., Papadopoulos, A. (eds) In the Tradition of Thurston II. Springer, Cham. https://doi.org/10.1007/978-3-030-97560-9_3
Download citation
DOI: https://doi.org/10.1007/978-3-030-97560-9_3
Published:
Publisher Name: Springer, Cham
Print ISBN: 978-3-030-97559-3
Online ISBN: 978-3-030-97560-9
eBook Packages: Mathematics and StatisticsMathematics and Statistics (R0)