
Abstract
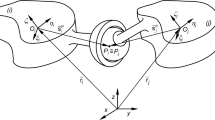
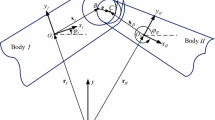
Spherical joints are commonly utilized in many real-world scenarios. From the more simplistic to the more complex perspectives, spherical joints might be modelled considering different cases. Thus, the aim of this study is to analyze and compare the influence of different spherical joint modelling approaches, namely the ideal, dry, lubricated, and bushing models, on the dynamic response of multibody systems. Initially, the kinematic and dynamic aspects of the spherical joint models are comprehensively reviewed. In this process, several approaches are explored and studied considering the normal, tangential, lubrication and bushing forces experienced by the multibody systems in such cases of spherical joints. The application of the spherical joint models in the dynamic modeling and simulation of the spatial four bar mechanism is investigated. From the results obtained, it can be stated that the choice of the spherical joint model can significantly affect the dynamic response of mechanical multibody systems.
Access this chapter
Tax calculation will be finalised at checkout
Purchases are for personal use only
Similar content being viewed by others

References
Ambrósio, J., Verissimo, P.: Improved bushing models for general multibody systems and vehicle dynamics. Multibody Sys.Dyn. 22, 341–365 (2009). https://doi.org/10.1007/s11044-009-9161-7
Flores, P.: Concepts and Formulations for Spatial Multibody Dynamics. Springer, Heidelberg (2015). https://doi.org/10.1007/978-3-319-16190-7
Flores, P., Ambrósio, J., Pimenta Claro, J.C., Lankarani, H.M.: Dynamics of multibody systems with spherical clearance joints. ASME J. Comput. Nonlinear Dyn. 1, 240–247 (2006). https://doi.org/10.1115/1.2198877
Flores, P., Ambrósio, P., Pimenta Claro, J.C., Lankarani, H.M.: Kinematics and Dynamics of Multibody Systems with Imperfect Joints - Models and Case Studies. Springer, Heidelberg (2008). https://doi.org/10.1007/978-3-540-74361-3
Flores, P., Lankarani, H.M.: Spatial rigid-multibody systems with lubricated spherical clearance joints: modeling and simulation. Nonlinear Dyn. 60, 99–114 (2010). https://doi.org/10.1007/s11071-009-9583-z
Lankarani, H.M., Nikravesh, P.E.: A contact force model with hysteresis damping for impact analysis of multibody systems. J. Mech. Des. 112, 369–376 (1990). https://doi.org/10.1115/1.2912617
Threlfall, D.C.: The inclusion of Coulomb friction in mechanisms programs with particular reference to DRAM au programme DRAM. Mech. Mach. Theory 13, 475–483 (1978). https://doi.org/10.1016/0094-114X(78)90020-4
Acknowledgments
This work has been supported by Portuguese Foundation for Science and Technology, under the national support to R&D units grant, with the reference project UIDB/04436/2020 and UIDP/04436/2020, as well as through IDMEC, under LAETA, project UIDB/50022/2020.
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2022 The Author(s), under exclusive license to Springer Nature Switzerland AG
About this paper

Cite this paper
Rodrigues da Silva, M., Marques, F., Tavares da Silva, M., Flores, P. (2022). Modelling Spherical Joints in Multibody Systems. In: Pucheta, M., Cardona, A., Preidikman, S., Hecker, R. (eds) Multibody Mechatronic Systems. MuSMe 2021. Mechanisms and Machine Science, vol 110. Springer, Cham. https://doi.org/10.1007/978-3-030-88751-3_9
Download citation
DOI: https://doi.org/10.1007/978-3-030-88751-3_9
Published:
Publisher Name: Springer, Cham
Print ISBN: 978-3-030-88750-6
Online ISBN: 978-3-030-88751-3
eBook Packages: Intelligent Technologies and RoboticsIntelligent Technologies and Robotics (R0)