
Abstract
Instrumentation of an unmanned aerial vehicle (UAV) with devices for physical interaction with ground-based objects is a popular scientific branch in the domain of robotics. Physical interaction of an onboard aerial manipulation system with objects complicates the UAV stabilization process, what, in turn, impairs the positioning of UAV and reduces navigational accuracy of the moving end of the mechanism. In this paper, the problem of the manipulator motion control for an unmanned aerial vehicle is considered. We also propose algorithms for the calculation of the angles of joints of the manipulator, based on the solutions of the direct and inverse kinematics problems. The developed algorithms ensure retaining of the center of mass of an aerial manipulator system on the vertical axis and minimum displacement of the center of mass horizontally when moving the end mechanism along the reference trajectory.
Access provided by Autonomous University of Puebla. Download conference paper PDF
Similar content being viewed by others


Keywords
1 Introduction
Manipulator-aided interaction with objects, where the manipulator is mounted on an UAV, is a relevant problem, because UAVs can reach many locations, which, in certain instances, are inaccessible for alternative ground-based robotic platforms [1,2,3]. Though, extending an aerial robotic vehicle with an onboard manipulator system poses serious issues, because any physical interactions of an UAV with ground-based objects influence the overall stability of the aerial manipulator system. In flight of the UAV, equipped with a mobile manipulator system, the mass distribution within the vehicle changes and additional dynamic reaction forces arise [4]. The design of the mechanism for object gripping and manipulation influences the acceptable payload mass, inertial and dynamic characteristics of the whole UAV. It is important to ensure, that the mass of this object would be low, and its center of mass would be positioned to the bottom part of the UAV. In this case, the reaction forces and torque, arising when the UAV is in motion, would not seriously impact its stability. Influence of the contact forces, permeating from the end gripper to the UAV, can be minimized, joining the aerial manipulator with the bottom of the UAV [5]. Such aspects are often neglected in the common platform stabilization algorithms, so a novel algorithm is required, that would be suitable to solve such problems. It is also important to consider, that the manipulators perform various kinds of motion: translation, rotation, with payload and without it, what influences the UAV diversely and impairs its stability [4].
In this paper, some problems are considered, related to the manipulator control, and respecting the instability of its base and interactions with ground-based objects. One of the main objectives is to ensure stability of the aerial manipulator system in gripping the ground-based objects, which should be achieved through the development of algorithms for stabilization of the UAV manipulator in motion.
The paper is organized as follows. In Sect. 2 the developed classification of the aerial manipulator system, based on the regulatory documents is provided. The results of modeling of the manipulator of an unmanned aerial vehicle are provided in Sect. 3. Conclusions are provided in Sect. 4.
2 Classification of Aerial Manipulation Systems
When creating UAVs classifications, the goal is not only to differentiate existing systems, but also to fix their parameters and areas of application in normative legal acts. This is due to the fact that it is quite difficult to create general rules for all types of UAVs, so different categories of UAVs may have different requirements depending on their characteristics. Most of these requirements relate exclusively to the security characteristics of the system, and they are also important from operational, commercial, legal, and other points of view.
Recently, UAVs have been used in a wide range of applications, including power line inspection; pipeline inspection; ship inspection; mine inspection; dam inspection; anomaly detection/prevention; early fire detection and forest protection; hazard monitoring; traffic monitoring; environmental monitoring; search and rescue operations; emergency response; border patrol; harbor patrol; police surveillance; aerial photography; SWAT support; imaging and mapping; intelligence, surveillance, and reconnaissance; chemical spraying; crop dusting; night vision; and entertainment industry and filming [6]. UAVs may operate autonomously or with remote control. The UAV is an integral part of the unmanned aerial system, which includes the UAV, communications system, and ground control station. The UAV overcomes the limitations of ground transport systems in terms of availability and speed.
There are a large number of criteria that can be used to classify UAVS, including the principle of flight, type of take-off and landing, take-off weight, maximum range and altitude, other characteristics such as overall dimensions, wingspan, operating conditions, functionality, and combinations of criteria. Figure 1 shows the classification of UAVs based on the key characteristics that are most widely used in design and operation.
Ground-based control systems are also involved in the operation of UAVs, which are responsible for exchanging information with UAVs and/or between several UAVs. With the development of technologies, a transition is being made from controlling the movement of UAVs for solving surveillance tasks to interacting with ground objects. Of particular interest is the grasping and retrieval of objects during UAV hovering; this requires a combination of approaches implemented for manipulating ground robots with control methods and the capabilities of aircraft in the range of speeds and vertical working space. Regarding the terminology, it is worth commenting that, in contrast to the classic formed notations in the aviation field, in the field of multirotor UAVs, the terminology is not yet fully settled and for hover mode, different scientific schools use the synonyms hovering, suspending, and others.
The creation of aerial manipulation systems opens prospects for new UAV applications, such as the search and delivery of objects in hard-to-reach areas, and in general, the creation of network logistics supply chains over large territories [7].

Classification of UAV.
Placing the payload on the suspension allows the vehicle to safely deliver it to the ground without having to land the aerial system itself. In [8], physical interaction with objects on the ground was performed using an unmanned helicopter for cargo transportation on a suspension. When transporting suspended cargo, the force of the cable causes a torque on the fuselage of the helicopter, which depends on the orientation of the helicopter and its forward movement. Therefore, there are difficulties associated with control due to the wind, the downward flow of the rotor and the dynamics of the payload swing relative to the helicopter. The weight of the cargo is crucial because the cost of an unmanned aerial system increases exponentially with this load. To avoid this limitation, the possibility of joint transportation of one cargo by several unmanned helicopters is also being investigated [9]. Compared to manned helicopter transport the use of multiple unmanned helicopters has the following advantages: 1) the cost of two small helicopters is often less than that of a single manned transport helicopter with a dual payload capacity, and 2) when the weight of the cargo exceeds the capabilities of a manned helicopter, it is impossible to ensure coordination between the helicopters to perform the transport, while the use of multiple unmanned helicopters is fully automated. However, there are drawbacks when multiple unmanned helicopters are connected to the load, the translational and rotational movement of one particular helicopter directly affects the rotation dynamics of all other helicopters, so the development of control algorithms is a very important and complex task.
In recent years, multirotors have been investigated for the task of transporting suspended small and light loads. For example, the anti-rocking maneuver controller for a quadrotor with an attached suspended load is considered in [10], and in [11] a simplified guidance law is proposed to solve the problem of autonomous landing with a suspended payload. The problems of using several multirotors together to transport suspended loads, such as a liquid-filled container suspended on rigid light links to quadrotors, are also being studied [12]. The development of a controller for the safe transportation of loads to the desired location with minimal fluctuations and without collisions is presented in the work [13]. Development of robot configurations that ensure static balance of the payload in the desired position while respecting cable tension restrictions and provide stability analysis of the payload [11].
The next step in the development of methods of physical interaction with ground objects is aerial manipulations performed by UAVs [14]. For this purpose, UAVs must be able to hover to position the end mechanism or gripper attached to the manipulator of the multirotor and transport the ground object. Aerial manipulation systems consist of two subsystems, namely an aerial platform and an interaction/manipulation mechanism (such as a robot manipulator or instrument) used for physical interaction with the environment or with objects in it. Attaching one or more manipulators or grippers/instruments to the aerial platform opens up unlimited potential for using UAVs in a wide variety of areas, such as: checking and servicing high-rise pipes in chemical plants [15], cutting high-voltage cables [16], rotating the valve [17], inspecting bridges [18], monitoring aggressive environments [19], canopy sampling [20], rock climbing [21], object transportation [22], landing and charging, object assembly, etc.
Among aerial platforms with autonomous flight capabilities, such as multirotors, unmanned helicopters, and fixed-wing UAVs, only multirotors are suitable for aerial manipulation due to their ability to hover.
Therefore, multirotors are the most frequently discussed aerial platforms for manipulating ground objects. Multirotors come in various configurations depending on the number of power nodes (rotor arms), the way the propellers are attached, the configuration of the power nodes, the orientation of the power nodes, the number of propellers on the blades, and the configuration of the propellers. As for the number of propellers, the most popular are tricopters [23], quadrotors [24, 25], hexacopters [26] and octocopters [27]. Among these multirotors, quadrotors are the most widely used aerial manipulation platforms due to their simple mechanical design and ability to hover, as well as low cost, maneuverability, and affordable precision control. The configuration of power nodes can be either with one propeller on the node, or a coaxial configuration, which means two propellers on the node [28]. A single-propeller configuration on a node provides higher efficiency than a coaxial configuration, but these platforms are less compact. Based on the orientation of the power node, the most popular configuration is the transverse configuration compared to the “plus” configuration. Multirotors with coplanar rotors have internal movement restrictions that can be compensated by using the degrees of freedom of the manipulators when performing aerial manipulation tasks, but this leads to a decrease in the permissible payload mass. Multirotors with non-coplanar rotors can overcome the above-mentioned restrictions on the movement of the aerial platform, so that the number of degrees of freedom of the manipulators can be reduced [29]. Most multirotors use two-blade propellers, and the results of [30] show that the three-blade version of the propellers gives a lower efficiency but can be useful for reducing noise and risk due to lower required revolutions.
Unmanned helicopters are also widely used in aerial manipulations after multirotors [31, 32]. They also have the ability to hover, like multirotors, but have a better load capacity compared to multirotors. Unmanned helicopters for aerial manipulation have two types of configurations: classic and Flutter design. The first configuration consists of a single large main rotor that is responsible for the overall lift of the system, while a smaller tail rotor or ducted fan balances the helicopter against unwanted main rotor torque. The Flutter design is a helicopter concept with two mutually engaged rotors of opposite rotation at the top, which avoids the use of a tail rotor. These platforms can lift a payload equal to the empty helicopter's own weight. Also, the absence of a tail rotor avoids the associated energy costs for torque compensation mentioned in the classical configuration [33]. Figure 2 shows the classification of aerial unmanned platforms suitable for physical interaction with ground objects.

Classification of aerial unmanned platforms for physical interaction with ground objects.
Compared to a multirotor, helicopters have greater lateral drag due to a larger side area, so wind disturbances cause more positioning errors. The inability to attach the manipulator to the top of the helicopter limits their use for checking ceiling surfaces, such as bridges. Helicopters also tend to be less maneuverable, especially in confined spaces [34].
The next category of aerial platforms is UAVS with channel propellers with a tail support [35, 36]. It consists of two subsystems and a torque generating mechanism: a fixed-pitch rotor driven by an electric motor, and a set of control blades located under the main propeller. The ducted fan configuration has features that make aerial vehicle flexible and suitable for operation in many contexts, some of which are unusual for aerial vehicle. In addition to the typical operating mode of an aerial vehicle in free flight, the fact that all moving and engaged parts are protected by an air duct makes the UAV suitable for physical interaction with the environment.
And finally, the recent emergence of the hybrid aerial platform for aerial manipulation. For example, airships can be used as UAVS when working together with a quadrotor [37] equipped with 3 identical manipulators for performing capture tasks. An innovative concept is the use of a transformable suspended platform where the entire platform can act as a gripper. In this case, the aerial platform consists of rotor power nodes, which can change their configuration in comparison with multi-motor blades with fixed rotors [38], etc.
Taking into account the options analyzed above, we will further consider a new classification of air handling systems that include three main functional elements: 1) aerial platform; 2) manipulator; 3) end mechanism. Figure 3 shows the main types of aerial manipulation systems and their components in the developed classification.
Aerial manipulation systems can consist of several manipulators attached to an aerial platform. The grips have the main advantages of 1) easy to build, 2) easy to model and manage, and 3) relatively inexpensive cost; but have the following disadvantages: 1) limited working space and 2) limited gripping capacity in terms of mass and volume. The manipulator consists mainly of two parts: one or more arms with several degrees of freedom attached to the aerial platform, and grips with various types of sensors. The manipulator significantly expands the working space compared to the gripper device and can use the redundancy of the manipulator to compensate for position errors when moving the aerial platform, so it is used in tasks that require complex movements.
Manipulators have the following disadvantages: 1) complex mechatronic system, 2) heavy weight; 3) complex control and 4) UAV destabilization. In addition to the parameters presented in the developed classification, when evaluating the capabilities of the UAV, the flight range, wingspan, mass of the permissible payload, range of the manipulator and other characteristics are also evaluated. In addition to the above-mentioned types of aerial manipulation systems, there are many other studies on soft grips and manipulators in practice, but there are not many successful practical implementations yet.
3 Modeling of UAV Manipulator
In this study, disturbances of the internal environment are not considered, we assume that the aerial manipulation system is ideally suited for interaction with ground objects. The external environment always contains disturbances and obstacles. These factors cause the aerial manipulation system to become unstable when interacting with ground objects. The aerial manipulation system itself is unstable, so the impact of the disturbance causes a strong vibration of the working end mechanism. Therefore, in this study, we will conduct an analysis to give the most stable model of the manipulator and design a controller for stabilizing the aerial manipulation system. Interaction of the aerial manipulation system with ground objects will be easier, even if the system is affected by disturbances.

Classification of aerial manipulation systems.
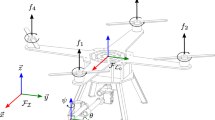
The aerial manipulation system works stably when the center of mass of the manipulator is on the vertical y axis of the system. In order to analyze the ability of the manipulator to keep its center of mass always on the vertical axis during its operation, a manipulator consisting of n links was considered. The Denavit-Hartenberg algorithm for assigning coordinate frames was used in this study.
An algorithm was developed for finding sets of angles between joints that satisfy the condition that the center of mass of the manipulator is on the vertical axis. The algorithm for calculating the coordinates of the key points of all links of the manipulator while keeping its center of mass on the vertical axis. The algorithm allows to determine all the positions of the manipulator, ensuring that the center of mass of the manipulator is on the vertical axis. This algorithm is the basis for designing a manipulator designed for mounting on a UAV. However, this algorithm is only the first step in the task of constructing a manipulator. In order to ensure that the manipulator can be used in an aerial manipulation system to interact with ground objects, at least the manipulator must meet the following conditions: when the manipulator extends to point at the object to be interacted with, the manipulator's working mechanism must move along a given trajectory. During the movement of the working mechanism along this trajectory, the center of mass of the manipulator is always held on the vertical axis. Figure 4 shows some common types of paths: diagonal, curve, horizontal, vertical, circle, etc. Points that are evenly distributed around the trajectories are the coordinates of finding the end working mechanism when the manipulator moves according to given algorithm.
Experimental results have shown that it is possible to design the manipulator so that its center of mass is always maintained on the vertical axis during operation [39]. The 5-DOF manipulator requires at least 2 links, which are always on the same side of the vertical axis, to balance the other links. This means that the working length of the manipulator will be significantly reduced, although its actual length is up to 1 m. On the other hand, the two links that act as counterweights will have more weight than the other links, thereby increasing the weight of the manipulator. If this heavy manipulator is mounted on an aerial manipulation system, the UAV will have to spend a lot of energy to carry it, which reduces the overall performance of the system.
4 Conclusion
Historically, the study of systems of control of UAVs has focused on the prevention of falls and contact with surrounding objects. This was mainly due to insufficient use of the payload available for the UAV. So far, UAVs have been used primarily for surveillance and monitoring tasks, such as search and rescue missions. However, the ability of aerial vehicles to manipulate and move the objects they encounter can significantly expand the types of missions performed by unmanned systems. Flying robots equipped with manipulators can lead to significant changes in transport logistics in near-earth environments. Unmanned aerial vehicles are now being actively used for monitoring land, mapping land yields, and planning fertilization zones. The relevance of the introduction of robotic systems in the agricultural sector is caused by socio-economic reasons due to heavy manual labor and the reduction of the world's freshwater resources.

Distribution of coordinates of the working mechanism around the motion trajectory.
An algorithm is developed to determine the allowable configuration of the manipulator for unmanned aerial vehicle, wherein the analysis of typical trajectories of the end working mechanism and the calculation of sets of angle ranges between the manipulator links that provide movement along specified trajectories while maintaining the center of mass of the manipulator on the vertical axis of the aerial manipulation system. The developed algorithm of calculation of coordinates of key points of all links of the manipulator, depending on the angles of joints on the basis of the decision of tasks of direct and inverse kinematics, wherein limiting the displacement of the centers of mass of the manipulator with its links and the end working mechanism for horizontal and vertical axes and thereby providing the movement mechanism of the limit trajectory is the minimum shift of the coordinates of the center of mass of the manipulator horizontally.
Currently, the use of UAVs for direct interaction with the environment is still limited due to its instability [40, 41]. A number of studies have been conducted on this topic, but most of them are performed at the modeling level. Certainly, working with objects using a manipulator mounted on a UAV and studying the features of controlling multirotor platforms equipped with a manipulator grip are promising areas for further research.
References
Danko, T.W., Oh, P.Y.: Design and control of a hyper-redundant manipulator for mobile manipulating unmanned aerial vehicles. J. Intell. Robot. Syst. 73, 709–723 (2014)
Kochetkov, M.P., Korolkov, D.N., Petrov, V.F., Petrov, O.V., Terentev, A.I., Simonov, S.B.: Application of cluster analysis with fuzzy logic elements for ground environment assessment of robotic group. SPIIRAS Proc. 19(4), 746–773 (2020). https://doi.org/10.15622/sp.2020.19.4.2
Medvedev, M.Y., Kostjukov, V.A., Pshikhopov V.X.: Method for optimizing of mobile robot trajectory in repeller sources field. Inform. Autom. 20(3), 690–726 (2021). https://doi.org/10.15622/ia.2021.3.7
Gardecki, S., Kasiński, A., Bondyra, A., Ga̧sior, P.: Multirotor aerial platform with manipulation system - static disturbances. In: Szewczyk, R., Zieliński, C., Kaliczyńska, M. (eds.) ICA 2017. AISC, vol. 550, pp. 357–366. Springer, Cham (2017). https://doi.org/10.1007/978-3-319-54042-9_33
Suarez, A., Heredia, G., Ollero, A.: Compliant and lightweight anthropomorphic finger module for aerial manipulation and grasping. In: Robot 2015: Second Iberian Robotics Conference, vol. 417, pp. 543–555 (2015)
Valavanis, K., Vachtsevanos, J.: Handbook of Unmanned Aerial Vehicles. Springer, Netherlands (2015)
Pound, P., Bersak, D.R., Dollar, A.M.: Grasping from the air: hovering capture and load stability. In: IEEE International conference on robotics and automation, pp. 2491–2498 (2011)
Bernard, M., Kondak, K.: Generic slung load transportation system using small size helicopters. In: 2009 IEEE International Conference on Robotics and Automation, pp. 3258–3264 (2009)
Bernard, M., Kondak, K., Maza, I., Ollero, A.: Autonomous transportation and deployment with aerial robots for search and rescue missions. J. Field Robot. 28, 914–931 (2011)
Graham, K.: Development of a quadrotor slung payload system. University of Toronto, Toronto. Master Thesis, no. 27541348 (2019)
Vargas, A., Ireland, M., Anderson D.: Swing free manoeuvre controller for RUAS slung-load system using ESN. In: 1 World Congress on Unmanned Systems Engineering. Oxford. (2014)
Sayyadi, H., Soltani, A.: Modeling and control for cooperative transport of a slung fluid container using quadrotors. Chin. J. Aeronaut. 31(2), 262–272 (2018)
Shirania, B., Najafib, M., Izadia, I.: Cooperative load transportation using multiple UAVs. Aerosp. Sci. Technol. 84, 158–169 (2019)
Michael, N., Fink, J., Kumar, V.: Cooperative manipulation and transportation with aerial robots. Auton Robot. 30, 73–86 (2011)
Aeroarms URL: www.aeroarms-project.eu
Lin, T., Li, Y., Qi, J., Meng, X.: Modeling and controller design of hydraulic rotorcraft aerial manipulator. In: 27th Chinese Control and Decision Conference (2015)
Shimahara, S., Leewiwatwong, S., Ladig, R., Shimonomura, K.: Aerial torsional manipulation employing multi-rotor flying robot. In: 2016 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), pp. 1595–1600 (2016)
Sanchez-Cuevas, P.J., Heredia, G., Ollero, A.: Multirotor UAS for bridge inspection by contact using the ceiling effect. In: 2017 International Conference on Unmanned Aircraft Systems (ICUAS), pp. 767–774 (2017).
Cacace, J., Finzi, A., Lippiello, V., Loianno, G., Sanzone, D.: Aerial service vehicles for industrial inspection: task decomposition and plan execution. Appl. Intell. 42(1), 49–62 (2014). https://doi.org/10.1007/s10489-014-0542-0
Kutia, J., Stol, K., Xu, W.: Aerial manipulator interactions with trees for canopy sampling. IEEE/ASME Trans. Mechatron. 23(4), 1740–1749 (2018)
Pope, M.T., Kimes, W.C., Jiang, H., Hawkes, E.W.: A multimodal robot for perching and climbing on vertical outdoor surfaces. IEEE Trans. Robot. 33(1), 38–48 (2017)
Kim, S., Choi, S., Kim, H.J.: Aerial manipulation using a quadrotor with a two DOF robotic arm. In: 2013 IEEE/RSJ International Conference on Intelligent Robots and Systems, pp. 4990–4995 (2013)
Papachristos, P., Alexis, K., Tzes, A.: Efficient force exertion for aerial robotic manipulation: exploiting the thrust-vectoring authority of a tri-tiltrotor UAV. In: 2014 IEEE International Conference on Robotics and Automation (ICRA), pp. 4500–4505 (2014)
Arleo, G., Caccavale, F., Muscio, G., Pierri, F.: Control of quadrotor aerial vehicles equipped with a robotic arm. In: 21st Mediterranean Conference on Control and Automation, pp. 1174–1180 (2013)
Yang, H., Lee, D.: Dynamics and control of quadrotor with robotic manipulator. In: 2014 IEEE International Conference on Robotics and Automation (ICRA), pp. 5544–5549 (2014)
Jiang, G., Voyles, R.M.: Hexrotor UAV platform enabling dextrous aerial mobile manipulation. In: 2013 IEEE International Symposium on Safety, Security, and Rescue Robotics (SSRR) (2014)
Heredia, G., Jimenez-Cano, A.E., Sanchez, I., Llorente, D.: Control of a multirotor outdoor aerial manipulator. In: IEEE/RSJ International Conference on Intelligent Robots and Systems, pp. 3417–3422 (2014)
Suarez, A., Soria, P.R, Heredia, G., Arrue, B.C.: Anthropomorphic, compliant and lightweight dual arm system for aerial manipulation. In: 2017 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), pp. 992–997 (2017)
Ryll, M., Bicego, D., Franchi, A.: Modeling and control of fast-hex: a fully–actuated by synchronized–tilting hexarotor. In: 2016 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), pp. 1689–1694 (2016)
Theys, B., Dimitriadis, G., Hendrick, P., De Schutter, J.: Influence of propeller configuration on propulsion system efficiency of multi-rotor unmanned aerial vehicles. In: 2016 International Conference on Unmanned Aircraft Systems (ICUAS), pp. 195–201 (2016)
Kuciński, T., et al.: Deployable manipulator technology with application for UAVs. In: Sąsiadek, J. (eds.) Aerospace Robotics II. GeoPlanet: Earth and Planetary Sciences, pp. 93–103. Springer, Cham (2015). https://doi.org/10.1007/978-3-319-13853-4_9
Kondak, K., Krieger, K., Albu-Schäeffer, A., Schwarzbach, M.: Closed-loop behavior of an autonomous helicopter equipped with a robotic arm. Int. J. Adv. Robot. Syst. 10(2), 145 (2013)
Bejar, M., Ollero, A., Kondak, K.: Helicopter based aerial manipulators. In: Ollero, A., Siciliano, B. (eds.) Aerial Robotic Manipulation. STAR, vol. 129, pp. 35–52. Springer, Cham (2019). https://doi.org/10.1007/978-3-030-12945-3_3
Huber, F., Kondak, K., Krieger, K., Sommer, D.: First analysis and experiments in aerial manipulation using fully actuated redundant robot arm. In: IEEE/RSJ International Conference on Intelligent Robots and Systems, pp. 3452–3457 (2013)
Gentili, L., Naldi, R., Marconi, L.: Modeling and control of VTOL UAVs interacting with the environment. In: 2008 47th IEEE Conference on Decision and Control, pp. 1231–1236 (2008)
Marconi, L., Naldi, R.: Control of aerial robots: hybrid force and position feedback for a ducted fan. IEEE Control Syst. Mag. 32(4), 43–65 (2012)
Korpela, M., Danko, T.W., Oh P.Y.: Designing a system for mobile manipulation from an unmanned aerial vehicle. In: 2011 IEEE Conference on Technologies for Practical Robot Applications (2011)
Zhao, M., Kawasaki, K., Chen, X., Noda, S., Okada, K., Inaba, M.: Whole-body aerial manipulation by transformable multirotor with two-dimensional multilinks. In: 2017 IEEE International Conference on Robotics and Automation (ICRA), pp. 5175–5182 (2017)
Nguyen, V., Saveliev, A., Ronzhin, A.: Mathematical modelling of control and simultaneous stabilization of 3-DOF aerial manipulation system. In: International Conference on Interactive Collaborative Robotics, pp. 253–264 (2020)
Lavrenov, L.O., Magid, E.A., Matsuno, F., Svinin, M.M., Suthakorn, J.: Development and implementation of spline-based path planning algorithm in ROS/Gazebo environment. SPIIRAS Proc. 18(1), 57–84 (2019). https://doi.org/10.15622/sp.18.1.57-84
Medvedev, M.Y., Kostjukov, V.A., Pshikhopov, V.X.: Method for optimizing of mobile robot trajectory in repeller sources field. Inform. Autom. 20(3), 690–726 (2021). https://doi.org/10.15622/ia.2021.3.7
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2021 Springer Nature Switzerland AG
About this paper

Cite this paper
Nguyen, V., Ngo, T., Vu, Q., Ronzhin, A. (2021). Classification of Aerial Manipulation Systems and Algorithms for Controlling the Movement of Onboard Manipulator. In: Ronzhin, A., Rigoll, G., Meshcheryakov, R. (eds) Interactive Collaborative Robotics. ICR 2021. Lecture Notes in Computer Science(), vol 12998. Springer, Cham. https://doi.org/10.1007/978-3-030-87725-5_13
Download citation
DOI: https://doi.org/10.1007/978-3-030-87725-5_13
Published:
Publisher Name: Springer, Cham
Print ISBN: 978-3-030-87724-8
Online ISBN: 978-3-030-87725-5
eBook Packages: Computer ScienceComputer Science (R0)