
Abstract
This chapter introduces the importance to study movement in the sports context, where human performance focuses on the continuous optimization of the physical condition of athletes in specific situations, which often require to be performed at high intensities. To optimize these actions, it is necessary to prioritize strength training, focused on improving useful strength, understood as the application of strength under specific time and velocity conditions per training to competitive exercise (issues reflected in force–velocity and force–time curves). To carry out from practice, it is necessary to monitor, quantify, adapt and prescribe strength training to understand the existing relationship between the external load proposed for the subject and its organic consequences to achieve the adaptations sought and thus optimize performance. To achieve this, it is important to measure and control movement from a mechanical perspective. In this sense, in this chapter, an initial analysis of different methods of strength training through kinetics and kinematics will be proposed.
Access provided by Autonomous University of Puebla. Download chapter PDF
Similar content being viewed by others

Keywords
- Kinetics
- Kinematics
- Force–time curve
- Force–velocity curve
- Flywheels
- Force–velocity profile
- Vertical jump
- Variable resistance
1 Introduction
Human movement has been a constant subject matter of research throughout history. There are endless studies dating back to Classical Greece (carried out by Aristotle; 384–322 bc) (Komi 1994), up to the present time. The need to understand what its characteristics are and how it originates, how it evolves as organic maturity occurs, why it is altered under certain circumstances, and how it can be optimized for improved performance in various situations, has led to significant development and application of scientific knowledge to attempt to answer these questions (Zatsiorsky and Kraemer 2006). To this end, the technology advances that have taken place until now help us know more about issues related to the process of nervous activation which originate movement and the mechanical consequences ruled by the laws of physics.
In the area of physical-sports training, the above, together with the principles which must guide performance optimization, require the use of technology to understand, from a mechanical perspective, which variables describe movement and which explain how it happens (through kinetics and kinematics), primarily in strength training. Therefore, monitoring various strength training methods, based on certain mechanical variables, is a useful tool, necessary to personalize and optimize physical performance.
This chapter provides the theoretical and practical basis for the importance of monitoring strength training by means of kinetic and kinematic analysis of the various methodologies described in future chapters.
2 From Theory
To simplify the difficult task of trainers, coaches, and other actors in charge of prescribing strength training, it is necessary to address the essential rationale of said task.
One of the main objectives of strength training should be to increase the subject’s ability in practical terms, and thus improve their physical-sports performance. In this sense, strength training should focus on improving useful strength, understood as the application of strength under specific time and velocity conditions pertaining to competitive exercise, (González-Badillo and Serna 2002; González-Badillo 2000). Hence, it is necessary to study the strength applied by the subject. Citing González-Badillo (González-Badillo and Serna 2002; González-Badillo 2000) applied strength is the external expression of internal tension generated in a muscle or group of muscles in a given time or at a given velocity. Thus, the importance of understanding and studying the existing relationships between the different mechanical variables that characterize the ability to apply force and which are represented by the curves force–time (C f–t) and force–velocity–power (C f–v–p).
2.1 Force–time Curve (C f–t)
When discussing applied force, we must understand that this occurs over time, thus giving way to the concept of application of force in a time unit (RFD), which is derived from the force- or torque time curves recorded during explosive voluntary contractions (Maffiuletti et al. 2016). Therefore, in sports training, RFD is considered explosive strength.
The study of RFD helps understand in detail whether any adaptations have taken place and if so, of what kind, after conducting certain strength training, regardless of the method used. Given that in sports, very often, performance is decided by improved velocity at which certain specific actions are carried out (such as running or jumping) (Tillin and Folland 2014), it may be considered that as sports performance is improved, conditions worsen and subjects will have less time to apply strength, as the same action must be carried out at a greater speed (González-Badillo and Gorostiaga 1995). Therefore, to improve sports performance it is necessary to improve the force–time ratio, that is, to produce the same strength in less time or achieve greater strength in the same amount of time. This enhancement is seen in C f–t as it moves upwards and to the left (see Fig. 1). Depending on the characteristics of the action conducted or, in other words, depending on the RFD characterizing the sports gesture carried out by the subject, there may be endless possibilities for the force–time ratio (see Fig. 2) that will depend on the time available to apply strength in a given context and the strength peak achieved, which is closely related to the resistance to be overcome (González-Badillo 2000).

Improvement in RFD after training

Different explosive force values based on the external load to overcome. MIF Maximal isometric force. MDF Maximal dynamic force
Therefore, based on C f–t, essential issues can be plotted on a graph such as the maximum peak of strength achieved and the time used for this at various moments of the training process, thus assessing the consequences of a given strength training.
2.2 Force–Velocity (C f–V) and Force–Velocity–Power Curve (C f–V–P)
Changes occurring in the applied force and shown in C f–t, as stated above, are also shown in another curve that should be studied and known, C f–v–p. Producing the same force in less time is the same as displacing the same resistance at a greater velocity and thus achieving greater strength in the same amount of time is the same as displacing greater resistance at the same velocity (González-Badillo and Serna 2002, González-Badillo 2000; González-Badillo and Gorostiaga 1995).
The essence of this curve lies in the graphical representation of the mechanical consequences derived from the neurophysiological “reality” of the skeletal muscle. At the muscular level, the relationship between these two variables is reversed, as muscle shortening speed increases there are fewer cross-bridges available and therefore less force may be exerted (Rassier et al. 1999; Lieber and Ward 2011). In the case of a drop in muscle shortening velocity, there is an increased possibility of forming a higher number of cross-bridges and therefore there is a proportional increase in the force exerted (see Fig. 3) (González-Badillo and Serna 2002; Rassier et al. 1999; Lieber and Ward 2011; Edman 1992). In line with this focus on muscular architecture, it is worth noting that the force–velocity ratio is also conditioned by the percentage of fast or slow fibres, which has a significant impact on C f–v–p. (see Fig. 3).

Influence of muscle fibre type on C f–v–p
Based on these core force–velocity ratio considerations, two essential matters must be understood. On the one hand, the possible existing relationship between the two variables depend on the load used by the subject and therefore it is necessary to know which is the right load to use. And on the other, to take into account the development desired graphically, to reflect adequate adaptations following a training period, which imply displacement of the curve towards the right and upwards (see Fig. 4). This displacement need not occur proportionately throughout the curve, it may be more accentuated in certain areas than in others and this will depend on the type of stimulus proposed and the area to be modified based on the subject’s needs.

Changes in C f–v after different training orientations. a Improvements across the force–velocity spectrum. b Improvements reflected on high force at low speed zone. c Improvements reflected on low velocity at high-speed zone
Moreover, from a mechanical perspective, force and velocity determine the power generated, as is graphically shown in the area under the curve (see Fig. 5). Therefore, changes towards the right and above C f–v, as indicated in the above paragraphs, result in an increase in the power generated, and there are thus various possibilities of increasing it. This has triggered controversy in the scientific community primarily in regard to its relationship with sports performance and in determining the loading with which to achieve maximum power in certain exercises (Kawamori 2004; Soriano et al. 2015; Foster 2016). In this sense, once the necessary power to conduct an exercise or series of exercises is known, the force–velocity curve will provide a very close index of the optimal conditions to achieve maximum sports performance (González-Badillo et al. 2005).

Graphical representation of C f–v–p and possible changes in power (after training) based on different modification on C f–v
It is thus necessary to control and monitor strength training regarding force–time and force–velocity-power ratios in order to understand which areas should be modified at any given time and based on this, plan the necessary stimuli using the most appropriate training methods.
The next section addresses the various strength training methods (which are amply dealt with in subsequent chapters), based on the mechanical perspective mentioned in the above paragraphs.
3 From Practice
In practical terms, strength training must include actions such as: monitor, quantify, prescribe, adapt, etc. And therefore, it is necessary to understand the existing relationship between the external load proposed for the subject and its organic consequences to achieve the adaptations sought and thus optimize performance. Therefore, an in-depth mechanical analysis of the main strength training methods is essential. This entails characterizing the main training methods covered in this book and specifically addressed in the next chapters, where training strategies for each one of them are provided.
3.1 Flywheel Devices (FW)
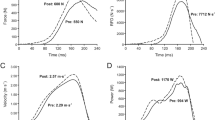
Strength training carried out with these devices basically focuses on the use of the momentum of force generated on a flywheel device, with the intention of providing the maximum linear resistance possible through a rope rolled around a cylinder (cylindrical pulley) (see Fig. 6a), or a cone-shaped vertical axis (cone pulley) (Norrbrand et al. 2008) during the various stages of movement (Núñez et al. 2020). To this end, the subject wears a harness that is attached to a rope (in the case of the cylindrical pulley) or pulls on it directly (in the case of the cone pulley). The movement begins until the rope is completely unrolled but the device continues turning due to inertia, making the rope recoil. Efficiency in the use of this training method is based on the subject’s intention to apply force at the maximum velocity possible during an acceleration phase or a concentric phase in order to then try to stop the rotating movement during the deceleration or eccentric phase. (Nuñez Sanchez et al. 2017; Maroto-Izquierdo et al. 2017). Therefore, the starting point requires characterizing (based on mechanics) movements conducted with a FW. Below is a graphic representation of the evolution of force and velocity with increased loading (understood as inertial load), using the two devices mentioned above (cone pulley and cylindrical pulley) (unpublished data from our laboratory). As shown in Fig. 6a), the peak velocity achieved both during the concentric and the eccentric phases of the exercise, is much higher when the cone pulley is used. We can also see how the peak velocity during the concentric phase with CP is considerably reduced with the 0.33 kg·m2 load (this being the largest load proposed for measurement). However, this trend is not so clear during the eccentric phase. On the other hand, we found that the peak velocity is higher in the concentric phase with CP for all loads, whereas when CS is used, the trend is the opposite, especially as the load increases. In relation to the force values (Fig. 8b), we found that with the CP device there was a slight (not very significant) increase in the concentric phase as loading increased, while during the eccentric phase the values were practically the same despite the increased resistance provided by this device. Furthermore, we found that the difference in the peak force in both phases with CP is considerably greater than with CS. On the other hand, when exercise is conducted with CS, the peak force achieved during the concentric phase is greater for all loads and there is a clear trend as the loading provided increases. In relation to the peak force during the eccentric phase with this device, it is greater for each load compared to CP, but it is maintained quite well despite its increase. In practical terms and based on the above, we should consider which device to be used based on the training goals (taking into account the force–velocity ratio). If the goal is to generate greater eccentric overload, as well as the device to be used, we need to consider whether it is necessary or not to increase overload.

Half squat a velocity and b force values achieved in the concentric and eccentric phase under different inertial loads with both FW devices (unpublished private data)
Several studies have shown that overloading, with FW, is effective to develop muscle hypertrophy, maximum force, power and even to improve various functional skills, measured both vertically and horizontally (Petré et al. 2018). This fact has recently attracted the interest of the scientific community in monitoring strength training by evaluating the F–V ratio of an individual under FW conditions and thus obtain data on the mechanical limitations imposed by the muscular capabilities through the FW load spectrum, similar to the work by (Jiménez-Reyes et al. 2017; Samozino et al. 2008) conducted with free weights. Spudić et al. (2020), proved that using four progressive loads (with an average of six repetitions with each one), helps achieve the F–V profile with FW. This allows personalizing FW training to improve athletic performance aimed at the force, velocity or power skills, taking into account previous considerations based on the use of different devices with varying inertial loads.
There are not many studies on the kinematic analysis of movements carried out with FW devices. Worthy of note is the work by Worcester et al. (2020) which studied the kinematics of doing squats in the sagittal plane with free weights vs an inertial device. On the one hand, they studied the impact of increasing the inertial load when using FW, on ankle, knee and trunk-hip joints (both in position and in the angular velocity achieved). An on the other hand, they compared the position acquired by each joint throughout the squat done with FW vs free weight with a load close to 10% of average power. The results showed that increasing inertial loads does not produce significant changes in the kinematics of movement in the sagittal plane, however, a significant drop was observed in the angular velocity as the inertial load was increased, on all joints except the trunk. When the angulations achieved in these two conditions were compared (standardized based on the percentage of movement), they found that the knee achieved a higher angulation of about 10º with FW (reaching approximately 100º), during practically all of the first part of the path of movement, becoming completely equal in the second part. In the ankle, when 10% of the path was completed, angulation was gradually increased with FW up to half of the path, where there was a difference of 20º, at which point it reached an angulation close to 120º, while during the second part of the path, the difference decreased gradually until angulation was equal when 75% of the path was reached. As for the trunk, the differences are more marked in favour of free weight, both when studied separately or together with the hip). Separately, when it reached 25% of the path, there was a very sharp increase until reaching 50% of the path, where there was a difference of about 20º, finally reaching approximately 60º (when the exercise was conducted with free weight). During the second part of the path, the dynamics were similar but opposite, so that when the path approached 75–80%, angulation was equal. When the study focused on the trunk-hip ratio, the dynamics were similar except for angulation achieved which reached approximately 120º with free weight.
As for angular velocity, it was similar in both conditions during the eccentric phase of the movement, while during the concentric phase, with free weight, angular velocity was considerably higher, possibly because the flywheel requires maximum effort throughout the range of movement, while with free weight, the greatest effort occurs at the beginning until the point of mechanical advantage is reached, after which the force applied increases.
3.2 Ballistic Push-Off Loaded Actions (BPLA)
In summary, and in practical terms, this section addresses the vertical jump, which can be considered the main BPLA used in strength training aimed at enhancing sports performance. Specifically, the mechanical considerations related to the force–velocity ratio which have led to conceiving a new paradigm for monitoring and strength training, such as the F–V–P profile for jumps.
Vertical jumps are a common method used by trainers to assess the muscular power of the ability for vertical impulsion. For a long time now, jump performance has become an important part of fitness tests in sports and certain medical areas. Throughout history, various authors have proven that the height of several types of vertical jumps can help assess muscular force and power (Vandewalle et al. 1987) or even the composition of muscle fibres (Bosco et al. 1983). Therefore, for decades, the focus has been more objectively and scientifically on understanding the characteristics of the vertical jump and its relationship with performance (Aragón-Vargas and Melissa 1997). In particular, the driving force of the lower body during a vertical jump is regularly used as a method to assess the explosive characteristics not only of sedentary subjects but also of elite athletes (Hubley and Wells 1983; Cardoso Marques and González-Badillo 2006; Marques et al. 2007). One of the main issues to be resolved therefore by trainers as well as researchers when studying the determining factors for performance during explosive actions, is which mechanical capacity of the neuromuscular system is more important: force or velocity (Samozino et al. 2008, 2012). In other words, is it better to be “strong” or “fast” to achieve maximum performance in ballistic movements? (Samozino et al. 2012). Such an analysis could provide a better understanding of the relationship between the mechanical properties of the neuromuscular system and functional performance, whether to further research animal motor behaviour (James et al. 2007; Jaric and Markovic 2009) or to plan athletic training for humans (Cormie et al. 2010; Cronin and Sleivert 2005; Frost et al. 2010). Therefore, to optimize these actions, studying power is essential. Although power should be understood from a new perspective in which it is not only the result of velocity through force, but rather the interaction of the aspects of force and velocity, highlighting the more important and novel relationship with the muscular characteristics to generate high power (Samozino et al. 2008, 2012). Based on this physiological evidence, in recent years a force–velocity profile has been validated (Samozino et al. 2012; Jiménez-Reyes et al. 2014), which integrates muscle characteristics and is subject-customized to enhance the interaction between force and velocity as factors in the neuromuscular system responsible for optimizing performance during explosive actions. This F–V profile represents a balance between maximum force capacity and maximum velocity potential for the subject. This profile is closely related to performance and most importantly, there is an optimal F–V profile which, firstly, is what allows interaction of the subject’s neuromuscular system to optimize power generation according to their individual characteristics and fitness level, and secondly, can be modified with adequate training, thus helping improve any deficiencies detected in any subject, bringing their actual profile closer to the optimal one. Therefore, the mechanical variables achieved after conducting the F–V profile are the following (Morin and Samozino 2016):
-
F0 (N/kg): Maximal output of concentric force (per unit of body mass) produced by lower limbs during ballistic push-off actions. This is determined by the full spectrum of the force–velocity ratio, providing more comprehensive information on the force capabilities, than obtaining the load with which RM is achieved. It corresponds to the intersection with the y axis of the linear ratio (F–V).
-
V0 (m/s): Maximal theoretical velocity of extension of lower limbs during ballistic push-off actions. It corresponds to the intersection with the x axis of the linear ratio (F–V). It also represents the capacity to generate force at a very high extension velocity.
-
Pmax (W/kg): Maximal capacity of the neuromuscular system to produce power (per unit of body mass) with lower limbs, during the concentric phase of ballistic push-off actions.
-
Sfv: Individual balance index of force and velocity capabilities. The more negative the value the greater the profile leans towards force and vice versa.
-
Sfvopt: Optimal profile representing the optimal balance between force and velocity capabilities. For a given Pmax, the profile will be related (all else remaining constant) to the highest performance possible for an individual in ballistic push-off actions.
-
FVimb: Relative difference between actual and optimal F–V profile. When the value is 100% it means the profile is optimized. If the value is greater than 100%, then a velocity deficit occurs (understood as the application of force to very high speeds). In contrast, if the value is lower than 100%, the opposite deficit occurs.
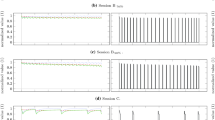
Figure 7 represents two complete profiles showing all the variables explained in the above paragraph. Figure 7a corresponds to a profile with an imbalance of 23% of application of force at high velocity, making it necessary therefore to work on the low area of the force–velocity ratio (shaded in grey) with the main objective (at that point) of displacing the current profile to the optimal one by going through the area highlighted in red (chart on the right). In contrast, Fig. 7b represents the profile of a subject with an imbalance of 23% in the capacity to generate high levels of force, making it necessary therefore to focus training on the high area of the force–velocity ratio (shaded in grey) with the main objective at that point of displacing the current profile to the optimal one by going through the area highlighted in red (chart on the right). On the left of both figures is a regression analysis of each test (comprised of four and three jumps, respectively), confirming the results given its proximity to 1.

Force–velocity profile in jump (CMJ) a FVimb oriented to velocity and b FVimb oriented to force
For further reading on individual training needs to optimize the profile, and on the time necessary for this, we recommend the following papers (Jiménez-Reyes et al. 2017, 2020).
3.3 Variable Resistance Training Systems (VRTS)
This section aims to show the mechanical effects of using variable resistance training systems, mainly elastic bands and chains. Firstly, it is necessary to understand how these two systems work in order to see how they can be applied to frequent strength training exercises.
In the case of elastic bands, where the anchors are placed is decisive for the effects to be produced during the exercise. If the elastic band is anchored below the bar or element to be displaced (upon which force is applied), an overload will be generated during the concentric phase of the movement, making it a resisted medium acting against gravity. As the upward path advances, the band tautens, generating more resistance (which increases in a curvilinear trend due to the stress–strain ratio), and a gradual decrease of velocity until movement stops (either due to reaching the end of the joint range or the elasticity limit of the band). Once this point is reached, the band will release the elastic energy stored in the opposite direction (in favour of gravity), causing an increase in the acceleration of movement during the descending or eccentric phase. (McMaster et al. 2009). If, on the other hand, the band is anchored above the bar, it will tauten in the descending or eccentric phase storing the corresponding elastic energy, which is then released in the ascending or concentric phase, increasing acceleration, becoming thus a facilitating element to lift the resistance to be overcome. When using an elastic band, bear in mind that given its viscoelastic properties, the stress–strain ratio may vary (Page and Ellenbecker 2005), and thereby the effect on the anchor point, which may consequently impact resistance in the exercise. Therefore, the type of elastic band (tubing, bungee or band), must be taken into account depending on the desired effect.
As for chains, they are considered a resistance medium characterized by applying linear resistance as path progresses due to rising of further chain links, leading to increased force in the concentric phase, which is maximal at the joint end of the range. Next, during the descending or eccentric phase, halting resistance is gradually reduced as more links rest on the ground (McMaster et al. 2009). When using chains, it is necessary to know the structure, density, length and diameter, since these will determine their weight and therefore the intensity of the load. In this regard, some papers propose reference values in order to obtain load details, based on knowing the value represented by each link of the chain lifting from or resting on the ground (Berning et al. 2004).
Using VRTS has generated a lot of interest and controversy in the scientific community. On the one hand, there are papers in which training with VRTS vs traditional training implies enhanced force (increased RM), power, velocity, when loads are greater than 75% of RM combined with the resistance provided by elastic bands (approximately 20% RM), in upper body exercises (Rivière et al. 2017; Baker and Newton 2009), and/or the lower body trying to balance the load (with stress caused by bands) when training was blended (Anderson et al. 2008). Other studies indicate that adding an additional load with elastic bands (of approximately 30% of RM) during the weekly training plan in team sports may enhance force and power of the upper and lower body (Joy et al. 2016). Furthermore, there are papers that show a similar enhancement of force and power (traditional training vs elastic bands, assuming 20–35% of total load prescribed) in the upper and lower body (both with squats and isokinetic assessment at various angular velocities) (Shoepe et al. 2011). In other cases, the use of chains as additional loading until reaching equal total load in both types of training (traditional vs traditional + chains), meant an increase in peak and mean velocity in the concentric phase of 10%, explained in part by the increase in peak velocity at the end of the eccentric phase, assuming a faster stretching-shortening cycle in the next concentric phase (Baker and Newton 2009).
Yet, on the other hand, there is scientific evidence that training with VRTS does not significantly improve force or power performance. There are papers comparing trainings (traditional vs chains as additional loading representing 5 and 10% of the prescribed load in Olympic movements) in which there were no improvements in the peak velocity and the RFD even worsened (Berning et al. 2004). In other studies, when comparing traditional training with elastic bands and chains (assuming in both cases 10% of total prescribed load) in back squats, no significant differences were found either in muscle electrical activity or force (peak or mean), either in the eccentric or the concentric phase (Ebben and Jensen 2002). Thus, and due to the limitations of many studies (level of training and subject anthropometric characteristics, correct quantification of load assumed by VRTS, alternating with other types of training, etc.), has meant that for many authors, the use of these systems has more a rehabilitating purpose rather than to optimize specific performance. Moreover, based on the core theme of this chapter (force applied/force–time ratio/force–velocity–power ratio), the practical use of these training systems would be as stimuli (in addition to traditional ones) that somehow help achieve the desired adaptations, shown in the F–V curves and profile, and if this essential premise is met, then they can be used according to scientific literature, however also being cautious of the limitations reported in order to optimize performance at all times.
4 Filling Gaps
In the area of sports training, it is common to distance oneself from its essence, which is no other than to optimize physical performance with the right stimuli for the subject/body in question, in order to make the necessary adaptations for a given situation. Therefore, it is essential to know the subject’s characteristics, as well as those of the stimulus proposed with various exercises and/or training tasks. Going back to that discussed at the beginning of the chapter, optimizing physical and sports performance is based to a great extent, on enhancing the capacity to apply force, as reflected by the appropriate modifications in the force–time and force–velocity–time ratios.
Therefore, one of the main challenges that trainers and coaches should address is to understand as much as possible whether what is being proposed is appropriate, in other words, whether the kinetic and kinematic characteristics of the stimuli proposed are appropriate to achieve the desired and necessary optimization. With this rationale, we should stay away from imitating procedures or “miracle” solutions since, regardless of the type of training used (strength training in this case), we must make sure it is the most suitable one at every given moment. We must not consider various strength training methods as better or worse, but rather as suitable or not for each moment and subject. This will force us to analyze them based on mechanics and allow us to make the most objective decisions possible, steering clear of “fads” or subjective preferences.
5 Take-Home Messages
-
1.
Assess specific performance (applied force) based on mechanics, with objective methods endorsed by the scientific community; F–V–P profile in jumps and sprint, load-velocity ratio, force–time ratio.
-
2.
Know the mechanical characteristics of the various methods of training and both the acute and chronic effects these may have.
-
3.
Use the various strength training methods according to the enhancement sought (power, applied force at high or low velocity…) making sure the kinetics and kinematics of the method and selected exercise are appropriate for each specific situation.
References
Anderson CE, Sforzo GA, Sigg JA (2008) The effects of combining elastic and free weight resistance on strength and power in athletes. J Strength Cond Res 22(2):567–574
Aragón-Vargas LF, Melissa GM (1997) Kinesiological factors in vertical jump performance: differences among individuals. J Appl Biomech 13(1):24–44
Baker DG, Newton RU (2009) Effect of kinetically altering a repetition via the use of chain resistance on velocity during the bench press. J Strength Cond Res 23(7):1941–1946
Berning JM, Coker CA, Adams KJ (2004) Using chains for strength and conditioning. Strength Cond J 26(5):80–84
Bosco C, Luhtanen P, Komi V (1983) A simple method for measurement of mechanical power in jumping. Eur J Appl Physiol 17:1865–1871
Cardoso Marques MA, González-Badillo JJ (2006) In-season resistance training and detraining in professional team handball players. J Strength Cond Res 20(3):563–571
Cormie P, McGuigan MR, Newton RU (2010) Changes in the eccentric phase contribute to improved stretch-shorten cycle performance after training. Med Sci Sports Exerc 42(9):1731–1744
Cronin J, Sleivert G (2005) Challenges in understanding the influence of maximal power training on improving athletic performance. Sport Med 35(3):213–234
Ebben WP, Jensen RL (2002) Electromyographic and kinetic analysis of traditional, chain, and elastic band squats. J Strength Cond Res 16(4):547–550
Edman K (1992) Contractile performance of skeletal muscle fibers. Strength power sport
Foster C (2016) Applied exercise physiology: a serendipitous personal journey toward a place that didn’t exist when the journey started. Fronteiras 5(3):172–187
Frost DM, Cronin J, Newton RU (2010) A biomechanical evaluation of resistance—fundamental concepts for training and sports performance. Sport Med 40(4):303–326
González-Badillo JJ (2000) Concepto y medida de la fuerza explosiva en el deporte. Posibles aplicaciones al entrenamiento. RED XIV(I):5–16
González-Badillo JJ, Gorostiaga E (1995) Fundamentos del entrenamiento de fuerza. Aplicación al alto rendimiento deportivo. InDE, Barcelona
González-Badillo JJ, Serna JR (2002) Bases de la programación del entrenamiento de fuerza, 1a. InDE, Barcelona
González-Badillo JJ, Gorostiaga EM, Arellano R, Izquierdo M (2005) Moderate resistance training volume produces more favorable strength gains than high or low volumes during a short-term training cycle. J Strength Cond Res 19(3):689–697
Hubley C, Wells R (1983) Physiology to vertical jump performance. Eur J Appl Physiol 50:247–254
James RS, Navas CA, Herrel A (2007) How important are skeletal muscle mechanics in setting limits on jumping performance? J Exp Biol 210(6):923–933
Jaric S, Markovic G (2009) Leg muscles design: the maximum dynamic output hypothesis. Med Sci Sports Exerc 41(4):780–787
Jiménez-Reyes P, Samozino P, Cuadrado-Peñafiel V, Conceição F, González-Badillo JJ, Morin JB (2014) Effect of countermovement on power–force–velocity profile. Eur J Appl Physiol 114(11):2281–2288
Jiménez-Reyes P, Samozino P, Brughelli M, Morin JB (2017) Effectiveness of an individualized training based on force-velocity profiling during jumping. Front Physiol 7
Jiménez-Reyes P, Garcia-Ramos A, Párraga-Montilla JA, Morcillo-Losa JA, Cuadrado-Peñafiel V, Castaño-Zambudio A et al (2020) Seasonal changes in the sprint acceleration force-velocity profile of elite male soccer players. J Strength Cond Res
Joy JM, Lowery RP, Oliveira De Souza E, Wilson JM (2016) Elastic bands as a component of periodized resistance training. J Strength Cond Res 30(8):2100–2106
Kawamori NHG (2004) The optimal training load for the development of muscular power. J Strength Cond Res 18(3):675–684
Komi PV (1994) Strength and power in sport. Med Sci Sports Exerc 26(11):1422
Lieber RL, Ward SR (2011) Skeletal muscle design to meet functional demands. Philos Trans R Soc B Biol Sci 366(1570):1466–1476
Maffiuletti NA, Aagaard P, Blazevich AJ, Folland J, Tillin N, Duchateau J (2016) Rate of force development: physiological and methodological considerations. Eur J Appl Physiol 116(6):1091–1116
Maroto-Izquierdo S, García-López D, Fernandez-Gonzalo R, Moreira OC, González-Gallego J, de Paz JA (2017) Skeletal muscle functional and structural adaptations after eccentric overload flywheel resistance training: a systematic review and meta-analysis. J Sci Med Sport 20(10):943–951
Marques MC, van den Tilaar R, Vescovi JD, Gonzalez-Badillo JJ (2007) Relationship between throwing velocity, muscle power, and bar velocity during bench press in elite handball players. Int J Sports Physiol Perform 2(4):414–422
McMaster DT, Cronin J, McGuigan M (2009) Forms of variable resistance training. Strength Cond J 31(1):50–64
Morin JB, Samozino P (2016) Interpreting power-force-velocity profiles for individualized and specific training. Int J Sports Physiol Perform 11(2):267–272
Norrbrand L, Fluckey JD, Pozzo M, Tesch PA (2008) Resistance training using eccentric overload induces early adaptations in skeletal muscle size. Eur J Appl Physiol 102(3):271–281
Núñez FJ, Galiano C, Muñoz-López A, Floria P (2020) Is possible an eccentric overload in a rotary inertia device? Comparison of force profile in a cylinder-shaped and a cone-shaped axis devices. J Sports Sci 38(14):1624–1628
Page P, Ellenbecker T (2005) Kinetics H (ed) Strength band training, 3rd ed. Champain, IL, 206 p
Petré H, Wernstål F, Mattsson CM (2018) Effects of flywheel training on strength-related variables: a Meta-analysis. Sport Med Open 4(1):55
Rassier DE, MacIntosh BR, Herzog W (1999) Length dependence of active force production in skeletal muscle. J Appl Physiol 86(5):1445–1457
Rivière M, Louit L, Strokosch A, Seitz LB (2017) Variable resistance training promotes greater strength and power adaptations than traditional resistance training in elite youth rugby league players. J Strength Cond Res 31(4):947–955
Samozino P, Morin JB, Hintzy F, Belli A (2008) A simple method for measuring force, velocity and power output during squat jump. J Biomech 41(14):2940–2945
Samozino P, Rejc E, Di Prampero PE, Belli A, Morin JB (2012) Optimal force-velocity profile in ballistic movements-altius: citius or fortius? Med Sci Sports Exerc 44(2):313–322
Sanchez NFJ, Sáez de Villarreal E, De Villarreal ES (2017) Does flywheel paradigm training improve muscle volume and force? A meta-analysis. J Strength Cond Res 31(11):3177–3186
Shoepe TC, Ramirez DA, Rovetti RJ, Kohler DR, Almstedt HC (2011) The effects of 24 weeks of resistance training with simultaneous elastic and free weight loading on muscular performance of novice lifters. J Hum Kinet 29(1):93–106
Soriano MA, Jiménez-Reyes P, Rhea MR, Marín PJ (2015) The optimal load for maximal power production during lower-body resistance exercises: a meta-analysis. Sport Med 45(8):1191–1205
Spudić D, Smajla D, Šarabon N (2020) Validity and reliability of force–velocity outcome parameters in flywheel squats. J Biomech 107:109824
Tillin NA, Folland JP (2014) Maximal and explosive strength training elicit distinct neuromuscular adaptations, specific to the training stimulus. Eur J Appl Physiol 114(2):365–374
Vandewalle H, Péerès G, Monod H (1987) Standard anaerobic exercise tests. Sport Med Int J Appl Med Sci Sport Exerc 4(4):268–289
Worcester KS, Baker PA, Bollinger LM (2020) Effects of inertial load on sagittal plane kinematics of the lower extremity during flywheel-based squats. J Strength Cond Res 1
Zatsiorsky V, Kraemer W (2006) Science and practice of strength training. Google Books
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2022 The Author(s), under exclusive license to Springer Nature Switzerland AG
About this chapter

Cite this chapter
Cuadrado, V. (2022). Kinetic and Kinematic Analysis for Exercise Design: A Practical Approach. In: Muñoz-López, A., Taiar, R., Sañudo, B. (eds) Resistance Training Methods. Lecture Notes in Bioengineering. Springer, Cham. https://doi.org/10.1007/978-3-030-81989-7_3
Download citation
DOI: https://doi.org/10.1007/978-3-030-81989-7_3
Published:
Publisher Name: Springer, Cham
Print ISBN: 978-3-030-81988-0
Online ISBN: 978-3-030-81989-7
eBook Packages: EngineeringEngineering (R0)