
Abstract
In the problem of state stabilization under constraints on state and control variables, it is assumed that the state of the system is measurable. However, in real situations, the state of the system is measured, as a rule, with an error. Therefore, the question of the possibility of using the obtained controller in this situation remains open. In this article, we study the problem of estimating the set of admissible initial states for a dynamic system, in which the controller obtained in the state feedback control synthesis problem under constraints imposed on state and control variables, will provide stabilization even in the case when the system state is measured with an error. The sufficient conditions are derived in terms of linear matrix inequalities to estimate the set of admissible initial states of a dynamical system. The solution is based on the application of the method of Lyapunov functions and technique of linear matrix inequalities. The key point in the proof of the theorem is the application of the S-procedure being non-defective under two constraints. As an example, the problem of stabilization of an inverted pendulum is considered. Numerical experiments have confirmed the theoretical results.
The reported study was funded by RFBR, project number 19-31-90086.
Access provided by Autonomous University of Puebla. Download conference paper PDF
Similar content being viewed by others

Keywords
1 Introduction
There are different ways of constructing controllers [1,2,3,4,5,6], including a method based on the use of the technique of linear matrix inequalities [1]. In the problem of state stabilization, it is assumed that the state of the system is measurable and control is constructed in the form of linear state feedback. With the help of modern software (for example, software for engineering calculations MATLAB [7]), we can get the parameters of such a controller. At the same time, a situation is possible when the obtained solution cannot be physically implemented. This is due to the fact that the synthesis of linear control laws based on the linear model of the controlled object can be effectively applied only where the linear model more or less adequately describes the real object, i.e. in a limited region of phase space. Note also that in real operating conditions the system must be in the area of its permissible states. In this regard, it becomes necessary to take into account the limitation on the phase variables of the object and control in the model. The problem of control synthesis under given constraints is complex and relevant at the present time [2, 3, 8].
In [2, 3], the problem of synthesis of state control is considered and solved, which provides stabilization of a dynamic object under constraints on state and control variables. In the phase space, the set of admissible initial states of the system is obtained, at which the controller stabilizes the system. However, in real situations the state of the system is measured, as a rule, with an error. Therefore, the question of the possibility of using the controller obtained in [2, 3] remains open in this situation.
In this article, we study the problem of estimating the set of admissible initial states for a dynamic system, in which the controller obtained in the state feedback control synthesis problem under constraints imposed on state and control variables, will also provide stabilization in the case when the state of the system is measured with an error. The sufficient conditions are derived in terms of linear matrix inequalities to estimate the set of admissible initial states of a dynamical system. The solution is based on the application of the method of Lyapunov functions and technique of linear matrix inequalities. The key point in the proof of the theorem is the application of the S-procedure being non-defective under two constraints [9]. As an example, the problem of stabilization of an inverted pendulum is considered. Numerical experiments have confirmed the theoretical results.
2 Preliminary Information
Consider a controlled object
where \(x \in R^n\)—state of the system, \(u \in R^l\) control, \(z_i\in R^{m_i}\)—controlled system outputs; A, B, \(C_i\) and \(D_i\)—given matrices of appropriate sizes.
The problem of stabilizing the object (1) using control in the form of linear state feedback
which ensures the asymptotic stability of the closed-loop system (1), (2), (3) and its fulfillment for given values \(\gamma _i\) of the constraints
was discussed in [2, 3]. Using the technique of linear matrix inequalities and the non-degradation of the S-procedure for quadratic inequalities [10], conditions were formulated on the set of initial states, starting from which the phase trajectories of system (1), closed by control (3), asymptotically approached the zero state and did not go beyond boundaries of the set defined by constraints (4). To solve the control synthesis problem in [3], a linear system with a constraint is analyzed. Consider the asymptotically stable linear system
where the matrix A is Hurwitz, i.e. all eigenvalues of this matrix have strictly negative real parts. The problem is posed of finding a set of initial states \(x(0)=x_0\), starting from which the phase trajectory does not go beyond the set defined by the constraint
for a given value \(\gamma >0\).
Note that if a function \(V(x)=x^T Y^{-1} x\) with a matrix \(Y=Y^T>0\) is a quadratic Lyapunov function of system (5), then all trajectories of this system outgoing from a set \(E(Y)=\{x:x^T Y^{-1} x\le 1\}\), bounded by an ellipsoid \(x^T Y^{-1} x = 1\), inscribed in the region of the phase space specified by the inequality \(|z(t)|\le \gamma \), satisfy constraint (6). In the matrix inequality \(Y>0\), the sign “>” means the positive definiteness of the matrix Y, i.e. \(u^T Y u>0\), \(\forall u \in R^n\), \(u \ne 0\). It is shown in this paper that the region of the phase space, defined by the union of all such sets E(Y) for all possible Lyapunov functions of the indicated form, can be distinguished in terms of linear matrix inequalities.
Theorem 1
If the matrix \(Y=Y^T>0\) satisfies the system of linear matrix inequalities
then all trajectories of system (5) with initial conditions \(x(0)\in E(Y)\) satisfy constraint (6).
This theorem was formulated and proved in [2, 3].
Note that there are a lot of matrices Y, satisfying the system of matrix inequalities (7). This, in turn, means that there are many sets of initial states determined by the corresponding ellipsoids. Therefore, there is a desire to find a set that is maximum in accordance with some criterion. In particular, maximization of the trace of the matrix Y under the constraints specified by linear matrix inequalities (7), or maximization of the volume of the corresponding ellipsoid can serve as criteria for searching for a set possessing, in a sense, “maximum” size.
In the case of analyzing an asymptotically stable linear system with several constraints, we define the set of initial states of the “largest” size as the set obtained by the intersection of ellipsoids with “maximal” sizes corresponding to each of these constraints.
The key point in solving the problem of stabilizing the plant (1) in the class of linear state feedbacks (3) under constraints (4) is the choice of a single Lyapunov function of the closed-loop system subject to constraints and the application of the S-procedure being non-defective under one constraint [10]. This allows us to represent sufficient conditions for finding the matrix of parameters of the controller (3) in terms of linear matrix inequalities. An S-procedure under one constraint is a trick that allows us to replace two inequalities for quadratic forms with their equivalent single inequality. It is as follows. Let there be an inequality
for all \(x \in R^n\), satisfying the inequality
where F(x) and G(x) are quadratic forms. Then we can compose a quadratic form \(S(x)=F(x)- \lambda G(x)\) and consider the inequality
for some \(\lambda \ge 0\). Replacing inequalities (8) and (9) by inequality (10) is called an S-procedure.
It is obvious that the fulfillment of (10) implies the fulfillment of (8) under condition (9). But the converse is also true. Provided that exists \(x_0\) for which \(G(x_0) < 0\), the fulfillment of inequality (8) under condition (9) implies the existence \(\lambda > 0\), for which holds the inequality
In this case, it is said that the S-procedure being non-defective for one restriction. The authors use this technique in [2, 3] for everyone i, which allows us to reduce the process of finding a single Lyapunov function of a closed-loop system to solving a system of linear matrix inequalities.
If a function \(V(x)=x^T Y^{-1} x\) with a matrix \(Y=Y^T>0\) is a single quadratic Lyapunov function of system (1), closed by control (3), then all trajectories of this system outgoing from a set \(E(Y)=\{x:x^T Y^{-1} x\le 1\}\), bounded by an ellipsoid \(x^T Y^{-1} x = 1\), inscribed in the phase space region defined by inequalities \(|z_i(t)|\le \gamma _i, i=1,2,...,N\), satisfy constraints (4). In [2, 3] was formulated and proved the following theorem.
Theorem 2
If matrices \(Y=Y^T>0\), Z and values \(\gamma _i >0, i=1,2,...,N\), satisfy the system of linear matrix inequalities
then all trajectories of system (1) closed by control (3) with initial conditions \(x(0)\in E(Y)\) satisfy constraints (4). The matrix of parameters of the control law (3) for a dynamical system with constraints is calculated as
Note that if the matrix of parameters of the control law (12) is found, then for all initial states \(x(0)\in \bigcap \limits _{i=1}^N E(Y_i)\) the phase trajectories of system (1) closed by control (3) will asymptotically approach the zero state and not go beyond the boundaries of the set defined by constraints (4). Here the sets \(E(Y_i)=\{x:x^T Y_i^{-1} x\le 1\}\) are obtained as sets of initial states \(x(0)=x_0\) for an asymptotically stable linear system for which the phase trajectory does not go beyond the limits of the set defined by the constraint \(\max \limits _{t \ge 0} |z_i(t)| \le \gamma _i\). In this case, it is desirable to choose sets \(E(Y_i)\) that have, in a certain sense, “maximum” size (for example, in the sense of maximizing the trace of the matrix \(Y_i\), or maximizing the volume of the corresponding ellipsoid).
As noted above, the key point in solving the problem of stabilization of the plant (1) in the class of linear state feedbacks (3) under constraints (4) is the choice of a single Lyapunov function of the closed-loop system taking into account the constraints. This is due to the fact that otherwise, choosing our own Lyapunov function for each constraint \(\max \limits _{t \ge 0} |z_i(t)| \le \gamma _i\), we arrive at the system of bilinear matrix inequalities

relatively unknown matrices \(X_i=X_i^T>0\), \(i=1,2,...,N\) and K. At present, there are no computationally efficient numerical methods for solving this class of problems.
Note that the result obtained in [2, 3] does not allow us to indicate the “complete” set of initial states, the phase trajectories of the system from which do not violate the constraints. As an example, consider a controlled inverted pendulum
with restrictions on \(\varphi \)—the angle of deviation of the pendulum link from the vertical and u—control:
We represent the equation and restrictions in the form (1), (2), where
Control found for object (13)
which ensures the asymptotic stability of the closed-loop system (13), (15) and the fulfillment of constraints (14). Control (15) was obtained as a result of searching for a matrix Y with a maximum trace and satisfying the system of linear matrix inequalities (11).

Estimation of the set of admissible initial states obtained by the intersection of ellipsoids in the stabilization problem for an inverted pendulum under constraints on the angle and control

The set of admissible initial states and its estimate obtained by the intersection of ellipsoids in the stabilization problem for an inverted pendulum under constraints on the angle and control
In Fig. 1 and Fig. 2 in the phase plane the dashed lines mark the restrictions
In Fig. 1, ellipse 1 limits the estimate of the set of initial states, at the choice of which control (15) provides stabilization of the inverted pendulum under the first constraint, i.e. by the angle \(\varphi \) of deflection of the pendulum. Ellipse 2 limits the estimate of the set of initial states, when chosen, the control provides stabilization under the second constraint, i.e. with control restrictions. At the intersection of ellipses, we obtain an estimate for the region of admissible initial states for which the control stabilizes the object under two constraints. In Fig. 1 and Fig. 2 this area is marked in light gray. A phase portrait of a closed system can be constructed and analyzed. In Fig. 2, the set of admissible initial states is marked in gray, starting from which the phase trajectories of system (13), closed by control (15), asymptotically approach the zero state and do not go beyond the boundaries of the set specified by constraints (14). As an example, trajectory 1 is given for the initial state \(\varphi =-0.09\), \(\dot{\varphi }=0.36\). In dark color in Fig. 2, the set of initial states is marked, at the choice of which the phase trajectories of the system will go beyond the boundaries of the region (16). As an example, trajectory 2 is given for the initial state \(\varphi =-0.095\), \(\dot{\varphi }=0.56\).
3 Formulation of the Problem
Suppose that for the object (1), (2) the stabilization problem under constraints on state and control variables is solved and the state control law (3) is found. In a real situation, the state of a dynamic system is measured with some error. In this regard, we introduce the measured output of the system
where I—identity matrix of size \(n\times n\), and the matrix \(\varDelta (t)\) determines the relative measurement errors of the phase variables, and satisfies the condition \(\varDelta ^T \varDelta \le \delta ^2 I\), \(\delta >0\)—given parameter. Consider the problem of stabilizing system (1), (2) by the controller
with restrictions on state and control variables (4). The question arises about the influence of errors in measuring phase variables on the fulfillment of constraints (4). In other words, the question arises of how the set of initial states of the system will change, for which controller (18) provides stabilization under constraints (4) and in the case of an error in the measured output (17).
4 Estimation of the Set of Admissible Initial States
Let us represent the measured output of system (17) as
where \(w=\varDelta (t) x\). Since the uncertainty matrix \(\varDelta (t)\) satisfies the condition \(\varDelta ^T \varDelta \le \delta ^2 I\), then
We write the closed-loop system (1), (2), (18), (19) in the form
where \(\overline{A}=A+B K\), \(\overline{B}=B K\), \(\overline{C_i}=C_i+D_i K\), \(\overline{D_i}=D_i K\).
Consider an auxiliary problem. Suppose it is required to find the sets of admissible initial states for which the control (18) provides system stabilization (21) for each i with one constraint \(\max \limits _{t \ge 0} |z_i(t)| \le \gamma _i\). The following theorem is true.
Theorem 3
Let the matrix \(X_i=X_i^T>0\) and values \(\mu _1>0\), \(\mu _2>0\), \(\delta >0\), \(\gamma _i>0\) satisfy the system of matrix inequalities
Then all trajectories of the closed-loop system (21) with the initial conditions \(x(0)\in E(X_i)\), \(E(X_i)=\{x:x^T X_i x\le 1\}\), satisfy the constraint
Proof
In the region of phase space given by the inequality \(|z_i(t)|\le \gamma _i\), we inscribe the ellipsoid \(x^T X_i x = 1\). Let us show that the fulfillment of the first inequality of system (22) ensures the fulfillment of the condition that a quadratic function \(V(x)=x^T X_i x\) with a matrix \(X_i=X_i^T>0\) is a Lyapunov function for a closed system. On any trajectory of the closed-loop system (21), the condition
According to the fact that the S-procedure is not defective under one constraint, inequality (23) holds for all x, w such that \(|x|^2+|w|^2 \ne 0\), satisfying inequality (20) if and only if for some number \(\mu _1>0\) and for all x, w performed the inequality
We write it in the form
This inequality is equivalent to the first inequality of system (22).
Let us show that the fulfillment of the second inequality of system (22) ensures the fulfillment of the condition \(|z_i(t)|\le \gamma _i\). For quadratic forms, the S - procedure is valid under two constraints [9]. The theorem states the following. Let there be given quadratic forms \(F(x)=x^T A_0 x\), \(G_1(x)=x^T A_1 x\), \(G_2(x)=x^T A_2 x\), where \(x \in R^n\), \(A_i=A_i^T \in R^{n\times n}\), \(i=0,1,2\) and numbers \(a_0\), \(a_1\), \(a_2\). Let’s make a quadratic form \(S(x)=F(x)-\tau _1 G_1(x)-\tau _2 G_2(x)\) and consider the system of inequalities
with some \(\tau _1 \ge 0\), \(\tau _2 \ge 0\). Consider the inequality
which, for all \(x \in R^n\), satisfies the system of inequalities
Then the fulfillment of inequalities (24) implies the fulfillment of inequality (25) under the condition (26).
Conversely, in case, if \(n \ge 3\), there are numbers \(\tau _3\), \(\tau _4\) and a vector \(x^0 \in R^n\) such that
then inequality (25) under condition (26) implies the existence of numbers \(\tau _1 \ge 0\), \(\tau _2 \ge 0\) for which condition (24) is satisfied.
Let’s apply the statement to solve the problem. Since the S-procedure being non-defective under two constraints, the inequality \(\max \limits _{t \ge 0} |z_i(t)|\le \gamma _i\) subject to condition (20) and condition \(x^T X_i x \le 1\) for all x, w such that \(|x|^2+|w|^2 \ne 0\), is equivalent to the existence of numbers \(\mu _2 \ge 0\), \(\mu _3 \ge 0\) for which performed the inequality
In this case, there must be numbers \(\mu _4\), \(\mu _5\) and a vector \(\left( \begin{array}{c} x^0 \\ w^0 \end{array}\right) \), such that
and
We write inequality (27) in the form
Inequality (30) is true for all x, w. Means
Hence
We write inequality (31) in the form
Matrix inequality (32) is equivalent to the second matrix inequality in system (22).
Find numbers \(\mu _4\), \(\mu _5\), satisfying inequality (28). Let us rewrite condition (28) as \(\mu _5>0\), \(\mu _4 X_i - \mu _5 \delta ^2 I>0\). Hence, given that \(X_i=X_i^T>0\), to satisfy these inequalities, it suffices to choose \(\mu _4=\frac{2 \delta ^2}{min|eig(X_i)|}\), \(\mu _5=1\).
Let us find a vector \(\left( \begin{array}{c} x^0 \\ w^0 \end{array}\right) \), satisfying inequalities (29). Since \(V(x)=x^T X_i x\) is the Lyapunov function, for all \(x\in E(X_i)\) inequality holds \(x^T X_i x \le 1\). Therefore, the first inequality (29) is satisfied if the point \(x^0\) lies inside the ellipsoid \(E(X_i)\). By virtue of inequality (20), for the second inequality (29) to hold, we choose \(w^0=\frac{\delta }{2}x^0\). The statement is proven.
Let us denote by \(\varXi _i\) the set of all matrices \(X_i\), satisfying inequalities (22). Let us choose the trace criterion as a criterion for minimality \(X_i\). The maximum over all \(X_i \in \varXi _i\) region \(E(X_i^*)\), is found by minimizing the trace of the matrix \(X_i\). This operation is standard in the MATLAB software package for engineering calculations [7] using the CVX application.
Let us formulate sufficient conditions for finding the region of admissible initial states of a dynamic system under which control (18), with the matrix of controller parameters K obtained in the problem of control synthesis under constraints imposed on state and control variables, will provide stabilization also in the case when the state of the system is measured with an error. Let the matrices \(X_i^*\), \(i=1,2,...,N\), have a minimal trace and are solutions of system (22) for values \(\gamma _i\), respectively. Then all trajectories of the closed-loop system (21) with the initial conditions \(x(0)\in E(X_i^*)\), \(E(X_i^*)=\{x:x^T X_i^* x\le 1\}\) will satisfy the constraint \(\max \limits _{t \ge 0} |z_i(t)| \le \gamma _i\). Therefore, for all initial states \(x(0)\in \bigcap \limits _{i=1}^N E(X_i^*)\), the control with a given matrix of controller parameters K, stabilizes the closed-loop system under constraints (4).
5 Numerical Simulation Results
Consider a controlled inverted pendulum
with restrictions on \(\varphi \)—the angle of deviation of the pendulum link from the vertical and u—control:
Numerical solution obtained in MATLAB package. For object (33), a number of problems have been solved. For the stabilization problem, in the absence of an error in the measurement of the state, the control is obtained
which ensures the asymptotic stability of the closed-loop system (33), (35) and the fulfillment of constraints (34).

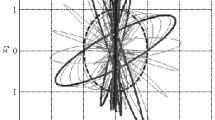
Intersection of areas \(\varSigma _{0}\), \(\varSigma _{0.05}\), \(\varSigma _{0.1}\) and \(\varSigma _{0.2}\)
In Fig. 3 in the phase plane, the dotted line marks the restrictions
Let us estimate the change in the estimate of the region of admissible initial states of the dynamic system, at which control (35) will provide stabilization even in the case when the state of the system is measured with an error. We denote \(\varSigma _{\delta }\) an estimate for the set of admissible initial states for which the control stabilizes the system for the value \(\delta \).
The algorithm for constructing area \(\varSigma _{\delta }\) is as follows. Consider two ellipses. The first ellipse \(E(X_1^*)=\{x:x^T X_1^* x\le 1\}\) limits the estimate of the set of initial states, at the choice of which control (35) provides stabilization of the inverted pendulum under the first constraint, i.e. by the angle \(\varphi \) of deflection of the pendulum. Here, the matrix \(X_1^*\) is a matrix with a minimum trace that satisfies the system of linear matrix inequalities (22) for given values \(\delta \) and \(\gamma _1\). The second ellipse \(E(X_2^*)=\{x:x^T X_2^* x\le 1\}\) limits the estimate of the set of initial states, when chosen, control (35) provides stabilization under the second constraint, i.e. with control restrictions. Here, the matrix \(X_2^*\) is a matrix with a minimum trace that satisfies the system of linear matrix inequalities (22) for given values \(\delta \) and \(\gamma _2\). At the intersection of ellipses, we obtain the desired estimate for the set of admissible initial states for which the control stabilizes the object under two constraints for a given value \(\delta \).
In Fig. 3 shows the areas \(\varSigma _{0}\), \(\varSigma _{0.05}\), \(\varSigma _{0.1}\), \(\varSigma _{0.2}\) corresponding to the values \(\delta =0\), \(\delta =0.05\), \(\delta =0.1\), \(\delta =0.2\), and shows the intersection of these areas. It follows from the figure that the area \(\varSigma _{0.2}\) lies inside the area \(\varSigma _{0.1}\), which in turn lies inside the area \(\varSigma _{0.05}\), and the area \(\varSigma _{0.05}\) lies inside \(\varSigma _{0}\).

The graph the dependence of the area of the region \(\varSigma _{\delta }\)
Let us calculate the dependence of the area S of the region \(\varSigma _{\delta }\) on the value \(\delta \), which determines the magnitude of the error in the measured output of the system. In Fig. 4 shows a graph of this dependence. In particular, the values \(S(0)=0.0819\), \(S(0.05)=0.0696\), \(S(0.1)=0.0541\), \(S(0.2)=0.0285\).
The performed calculations showed that the ellipses responsible for the constraints on the deflection angle of the pendulum link at the values \(\delta =0\), \(\delta =0.05\), \(\delta =0.1\) and \(\delta =0.2\) are close to each other. Consequently, the size of the region \(\varSigma _{\delta }\) of admissible initial states is mainly influenced by both the value of the parameter value \(\delta \), and the presence of a control constraint in the problem.
6 Conclusions
The problem is posed and solved to estimate the region of admissible initial states of a dynamic system, at which the controller obtained in the problem of synthesis of state control under constraints imposed on state and control variables will also provide stabilization in the case when the system state is measured with an error. In terms of linear matrix inequalities, conditions are obtained that make it possible to estimate the set of admissible initial states of a dynamical system. The problem of stabilization of an inverted pendulum is considered as an example. Numerical experiments confirm the theoretical results.
Note that when solving practical problems of controlling real physical objects, complete information about the state of the system is usually inaccessible to measurement. In this regard, a nontrivial problem arises of stabilizing dynamic objects by the measured system output. In the future, it is planned to consider the situation when part of the phase variables or their linear combination is measured. It is supposed to solve the stabilization problem using a static controller under constraints on the phase and control variables, and also to estimate the region of admissible initial states for the obtained controller in the presence of an error in the measurements of the output variables.
References
Balandin, D.V., Kogan, M.M.: Sintez zakonov upravleniya na osnove lineinykh matrichnykh neravenstv (Design of Control Laws on the Basis of Matrix Inequalities). Fizmatlit, Moscow (2007)
Balandin, D.V., Kogan, M.M.: Linear control design under phase constraints. Autom. Remote. Control. 70(6), 958–966 (2009). https://doi.org/10.1134/S0005117909060046
Balandin, D.V., Kogan, M.M.: Lyapunov function method for control law synthesis under one integral and several phase constraints. Differ. Equ. 45(5), 670–679 (2009). https://doi.org/10.1134/S001226610905005X
Balandin, D.V., Kogan, M.M.: LMI based multi-objective control under multiple integral and output constraints. Int. J. Control 83(2), 227–232 (2010). https://doi.org/10.1080/00207170903134130
Hu, T., Lin, Z.: Control Systems with Actuator Saturation. Birkhauser, Norwell (2001)
Polyak, B.T., Shcherbakov, P.S.: Robastnaya ustoichivost i upravlenie (Robust Stability and Control). Nauka, Moscow (2002)
Gahinet, P., Nemirovski, A., Laub, A.J., Chilali, M.: The LMI Control Toolbox. For Use with Matlab. User’s Guide. MathWorks, Natick (1995)
Fedyukov, A.A.: Sintez stabiliziruyushchikh regulyatorov po vykhodu dlya dinamicheskikh sistem s ogranicheniyami na fazovyye peremennyye (Synthesis of dynamic regulators stabilizing systems with phase constraints). Vestnik of Lobachevsky State Univ. Nizhni Novgorod 2(1), 152–159 (2013)
Polyak, B.T., Khlebnikov, M.V., Rapoport, L.B.: Matematicheskaya teoriya avtomaticheskogo upravleniya (Mathematical Theory of Automatic Control). LENAND, Moscow (2019)
Gelig, A.Kh., Leonov, G.A., Yakubovich, V.A.: Ustoichivost’ nelineinykh sistem s needinstvennym sostoyaniem ravnovesiya (Stability of Nonlinear Systems with Nonunique Equilibrium Position). Nauka, Moscow (1978)
Author information
Authors and Affiliations
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2021 Springer Nature Switzerland AG
About this paper

Cite this paper
Fedyukov, A.A. (2021). Estimating a Set of the States in the Case of an Error in the Measured Output for Controlled System. In: Balandin, D., Barkalov, K., Gergel, V., Meyerov, I. (eds) Mathematical Modeling and Supercomputer Technologies. MMST 2020. Communications in Computer and Information Science, vol 1413. Springer, Cham. https://doi.org/10.1007/978-3-030-78759-2_23
Download citation
DOI: https://doi.org/10.1007/978-3-030-78759-2_23
Published:
Publisher Name: Springer, Cham
Print ISBN: 978-3-030-78758-5
Online ISBN: 978-3-030-78759-2
eBook Packages: Computer ScienceComputer Science (R0)