
Abstract
This paper will demonstrate a solution for detecting damage to a bridge structure from measured displacements gathered using a roving vision sensor based approach. The measurement of displacement was accomplished using a synchronised multi-camera vision-based displacement measurement system. Displacement measurements can provide a valuable insight into the structural condition and service behaviour of bridges under live loading. Computer Vision systems have been validated as a means of displacement calculation, the research developed here is intended to form the basis of a real time damage detection system. This is done through the use of unsupervised deep learning methods for anomaly detection which could form the basis of a low cost durable alternative. The performance of the system was evaluated in a series of controlled laboratory tests. This research provides a means of detecting changes to a bridge structure through use of minimal sensor installation, reducing potential sources of error and allowing for potential live rating of bridge structures.
Access provided by Autonomous University of Puebla. Download conference paper PDF
Similar content being viewed by others

Keywords
1 Introduction
The progressive deterioration of civil infrastructure is now of paramount concern to asset owners and users alike. Structural damage results in a change in the geometric or material properties of bridges which manifests through a change in stiffness or stability of the structure. Traditional bridge inspections are sensitive to human error and bias and can often result in over conservative assumptions on reduced load carrying capacity [1]. Structural Health Monitoring (SHM) systems provide a means of objectively capturing and quantifying this change under operational conditions. The application of such systems has significant cost saving potential across the lifespan of bridge structures and can ensure the safe operation of our road and rail transport networks. With over one million bridges across Europe the task of assessing each structure often surpasses the available resources. This shortfall dramatically reduces the resilience of transport networks particularly considering 35% of Europe’s rail bridges are over 100 years old [2]. The understanding of the true capacity of this aging infrastructure is now more critical than ever as in recent years the UK witnessed an increasing number of failure events in clusters of bridges such as those witnessed in Northern Ireland in 2017 and Yorkshire in 2019 [3, 4]. In response to this during the last two decades a significant amount of research has been dedicated to the development and enhancement of SHM systems for bridge monitoring. The challenge of accurately detecting and quantifying damage in civil infrastructure still exists globally and few systems have been deployed and verified on real bridges. Displacement measurements provide a valuable insight into the structural condition and service behaviour of structures under live loading. Displacement has been used as a metric for bridge condition rating in numerous studies outlined in the following section. Analysis of monitored displacement values over time can provide an insight in possible excessive loading or changes to structural behaviour, since displacement can be directly linked to structural stiffness and external loading. In a long term analysis (multiple years), the displacement responses can be used to create a pattern of structural response to temperature or vehicle loading, if measured responses display extreme variance from this pattern it could be surmised that there has been a change to the structural properties of the monitoring subject.
In [5], a displacement curve was used to detect damage to a cantilever beam structure. In [6], Zhang et al. used the displacement caused by a vehicle passing over a bridge structure as a modelling scenario for simulated damage detection.
This type of experiment, where the changes to the displacement curvature based on repeated passes by a vehicle established the methodology of the laboratory work described in this paper. A test setup by Catbas et al., where a bridge model is fully instrumented to determine displacement from a passing vehicle is laid out in [7]. This was developed upon in [8] where a series of Linear Variable Differential Transducers (LVDT) were used to detect damage under a roving sensor approach. The research presented below will further enhance the development of roving sensor systems for damage detection by replacing the cumbersome setup of the LVDT series with a system of time synchronised cameras for displacement measurement that was demonstrated by the authors in [9].
These studies all demonstrate the use of displacement measurements as a powerful means of assessing bridge condition through performance. The displacement measurements will be used as means for training an autoencoder [10], which is an unsupervised neural network frequently used for anomaly detection [11, 12]. An autoencoder consists of two parts, an encoder and a decoder. The encoder maps the input to a lower-dimensional space, and the decoder maps the encoded data back to the input. If an autoencoder is trained to recognize a certain type of input, in this case our baseline scenarios, any deviation from this output would have a high reconstruction error. This will be demonstrated in the following sections.
2 Methodology
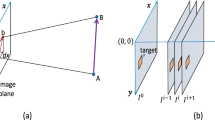
A laboratory model study of a two-span bridge was developed in the Experimental Design and Monitoring (EDM) laboratory of Civil Infrastructure Technologies for Resilience and Safety (CITRS) at University of Central Florida (UCF). The bridge has two 300 cm main continuous spans supported by three steel frame sections as shown in Fig. 2. The bridge deck is 120 cm wide and 600 cm long of steel plate construction with the thickness of 3.18 mm. The steel deck is supported by two 25 × 25 × 3.2 mm steel girders with the space of 0.61 m. The girders are denoted as A and B as illustrated in Fig. 1. The connection sets with four M6 bolts and 3.18-mm-thick plates are used to connect the girders and the deck. A small-scale toy truck is employed as the moving load on the bridge in this study.

Two span model bridge

Experimental cases and configurations
The supports of the bridge are varied during the experiment to simulate the change of boundary condition, replicating common real-life bridge conditions. The undamaged case, i.e., baseline, in this experiment is the case that all the supports are rollers. Four damage cases are designated by changing the supports of the Girder B. Two lanes were predefined on the deck: one was close to Girder A (lane 1) and the other was close to Girder B (lane 2). The truck ran on the lane 2 travelling longitudinally from left to right to simulate the moving load. Four cameras were employed to measure the displacements of the predefined measurement nodes on the girders, from 1 to 16, as shown in Fig. 2.
Each camera was set up using a fixed tripod to measures one node in each run, as such the measurement of all the nodes cannot be captured in one run. In the study, the cameras were roved to accommodate all the measurement nodes. As shown in Fig. 2, Node 1 was set as the reference node (Ref. Node) and it is measured in each run. The triangles in Fig. 2 represent the cameras used in each run in addition to the reference camera that remained fixed at Node 1. For Test 1, this indicates Nodes 2–4, Test 2 consists of Nodes 5–7 and so on until all nodes have been monitored. Vertical displacements of the Ref Node for the first crossing at no damage condition is shown in Fig. 3a.

Node 1 displacement time history (a) and its PSD plot (b)
The response pattern is similar to other nodes located on the left span. Vertical displacement histories of the nodes on the right span are opposite to the ones on the left support. When the vehicle is on the left span the right span lifts up, and vice versa. The raw response measurements contain both static component (bridge deflection) and dynamic component (bridge vibration induced by the vehicle). The static response can be isolated by processing the raw response with an adequate high-pass filter. The conversion of the response measurement from time domain to frequency domain reveals fundamental frequencies. The power spectrum density (PSD) plot is used to set a suitable high-pass filter. The lowest frequency component, which is 0.098 Hz, presents duration of the vehicle crossing. The crossing lasts approximately 10 s. The frequency range of the dynamic response is above 4 Hz (see Fig. 3b). Thus the high pass frequency is set to 1 Hz. The resulting signal is subtracted from the raw measurements leaving only the component of the static response. During the trials, it was not possible to ensure that all runs start and end at the same time. They also vary slightly in their duration. For these reasons, selecting the range of vertical displacements of each node as the damage factor (DF) is the best choice.
3 Results
The filtered displacement ranges were used as a basis for a 1-dimensional CNN autoencoder training dataset. This was done by using the variance between displacement ranges between runs 1–5 in the undamaged scenario as boundary conditions to generate displacement scenarios for all nodes on the bridge. This was repeated 50,000 times to make a dataset that encompassed “normal” behavior of the bridge. This was split int 45,000 training examples and 5000 validation examples. The 4 damage scenarios were also used as candidates for scenario generation in the test dataset, with 6500 “normal” scenarios and 1500 damaged scenarios generated. The autoencoder was then trained for 100 epochs with early stopping, the optimal loss was found after 63 epochs. A threshold for classification of undamaged vs damaged scenarios was then calculated by comparing the RMSE for the predictions on the test set and determining the optimal decision boundary. If the DF generated by the autoencoder from the supplied displacements was outside the boundary conditions determined in the training phase, the scenario was labeled as damaged. This method was successful at identifying damage was present, but was incapable of localizing where damage occurred on the structure. The results for the predictions from the trained autoencoder are shown in Table 1.
4 Conclusions and Future Work
As can be seen from the results, it is possible to use a roving sensor setup to establish a baseline scenario in which to detect changes to a bridge structure. This has shown that the sensor roving technique is viable as a means of data collection for vision based monitoring, which can lead to a reduction in monitoring costs for real life scenarios. The automated nature of the results analysis means that, if paired with an accurate method for load evaluation, real time damage detection can be implemented. The accuracy of the proposed system could also be improved by feeding in live data in a continuous training methodology similar to the work in [13]. The next steps in this work are:
-
Perform additional laboratory trials to obtain more undamaged scenario readings to validate that the boundary conditions set out in the initial runs are feasible. There are other scenarios which could also be explored, i.e. multiple vehicles, differing weights etc.
-
Create less severe damage scenarios to determine the accuracy of the proposed system when damage is not at critical levels.
-
Plan and execute field trials of the system to determine the accuracy of scenario measurement outside a controlled laboratory environment.
References
Phares BM, Washer GA, Rolander DD, Graybeal BA, Moore M (2004) Routine highway bridge inspection condition documentation accuracy and reliability. J Bridg Eng 9(4):403–413
Mainline (2013) Maintenance, renewal and improvement of rail transport infrastructure to reduce economic and environmental impacts. In: Deliverable D1.1: Benchmark of New Technologies to Extend the Life of Elderly Rail Infrastructure European Project, Luleå, Sweden, 7th, Sweden
BBC. Northern Ireland floods: More than 100 people rescued—BBC News
Telegraph. UK weather: Bridge collapses and roads washed away as flood warnings continue to midnight
Dworakowski Z, Kohut P, Gallina A, Holak K, Uhl T (2016) Vision-based algorithms for damage detection and localization in structural health monitoring. Struct Control Heal Monit 23(1):35–50
Zhang Y, Lie ST, Xiang Z (2013) Damage detection method based on operating deflection shape curvature extracted from dynamic response of a passing vehicle. Mech Syst Signal Process 35(1–2):238–254
Khuc T, Catbas FN (2018) Structural identification using computer vision-based bridge health monitoring. J Struct Eng (United States) 144(2):04017202
Celik O, Terrell T, Gul M, Necati Catbas F (2018) Sensor clustering technique for practical structural monitoring and maintenance. Struct Monit Maint 5(2): 273–295
Lydon D et al (2018) Development and field testing of a time-synchronized system for multi-point displacement calculation using low-cost wireless vision-based sensors. IEEE Sens J 18(23):9744–9754
Hinton GE, Salakhutdinov RR (2006) Reducing the dimensionality of data with neural networks. Science (80-) 313(5786): 504–507
Sakurada M, Yairi T (2014) Anomaly detection using autoencoders with nonlinear dimensionality reduction. In: ACM international conference proceeding series, vol 02, Dec 2014, pp 4–11
Zhou C, Paffenroth RC (2017) Anomaly detection with robust deep autoencoders. In: Proceedings of the ACM SIGKDD international conference on knowledge discovery and data mining, vol Part F129685, pp 665–674
Tonioni A, Tosi F, Poggi M, Mattoccia S, Di Stefano L (2019) Real-time self-adaptive deep stereo. In: Proceedings of the IEEE computer society conference on computer vision and pattern recognition, June 2019
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2021 The Author(s), under exclusive license to Springer Nature Switzerland AG
About this paper

Cite this paper
Lydon, D., Lydon, M., Early, J., Taylor, S. (2021). Use of a Roving Vision Sensor Setup to Train an Autoencoder for Damage Detection of Bridge Structures. In: Rainieri, C., Fabbrocino, G., Caterino, N., Ceroni, F., Notarangelo, M.A. (eds) Civil Structural Health Monitoring. CSHM 2021. Lecture Notes in Civil Engineering, vol 156. Springer, Cham. https://doi.org/10.1007/978-3-030-74258-4_24
Download citation
DOI: https://doi.org/10.1007/978-3-030-74258-4_24
Published:
Publisher Name: Springer, Cham
Print ISBN: 978-3-030-74257-7
Online ISBN: 978-3-030-74258-4
eBook Packages: EngineeringEngineering (R0)