
Abstract
In this paper, we present a chemostat-type model with impulsive effects in a polluted karst environment. The globally asymptotically stable sufficient condition are gained for a microorganism-extinction periodic solution. System permanent condition are also presented. The results are illustrated by simulations.
Supported by NNSFC (No.11791019,11361014), the Science Technology Foundation of Guizhou Education Department (No.QJK[KY]2018019).
Access provided by Autonomous University of Puebla. Download conference paper PDF
Similar content being viewed by others

Keywords
1 Introduction
There are wide underground rivers in the underground rock gaps of karst areas. It easy for pollutants and nutrient of soils to come into aquifers for the thin soil layers of karst areas [1]. Many authors [2,3,4] employed SDE,PDE,ODE and IDE to study chemostat systems. References [5, 6] devoted themselves to the effects of toxicants on population. But there are few authors devoted themselves to karst environmental chemostat system with impulsive diffusing and pulse inputting. We mark a notation as \(N=nT, N+L=(n+l)T.\)
2 The Model
In this paper, we present a chemostat-type model with impulsive effects in a polluted karst environment
where system (1) is constructed by two patches, patch (1) is a non-polluted environment and patch (2) is a polluted environment. The meanings of the variables and parameters can be consulted from reference [3,4,5].
3 The Foundation
If \(Y=0\), there are two subsystems of system (1) as
and
i) Integrating on system (2)
Then,
From system (5), we gain
where \(K_{1}=[(1-d)(1-e^{-D_{1}T})-(1-2d)(1-e^{-D_{2}T})e^{-D_{1}T}]x^{0}_{1} -d(1-e^{-D_{2}T})x^{0}_{2}+(1-e^{-D_{2}T},\) \(K'_{1}=de^{-D_{2}T})\theta _{1},\) \(K_{2}=1-(1-d)e^{-D_{1}T}-(1-d)e^{-D_{2}T}\) \(K'_{2}=-(1-2d)e^{-(D_{1}+D_{2})T},\) \(K_{3}=-d(1-e^{-D_{1}T})x^{0}_{1}+[(1-d)(1-e^{-D_{2}T})-(1-2d)(1-e^{-D_{1}T})e^{-D_{2}T}]x^{0}_{2},\) \(K'_{3}=de^{-D_{1}T}\theta _{1},\) and \(K_{4}=1-(1-d)e^{-D_{2}T}-(1-d)e^{-D_{1}T},\) \(K'_{4}=-(1-2d)e^{-(D_{2}+D_{1})T}.\)
The map \(G: R^{2}_{+}\rightarrow R^{2}_{+}\) coming from system (5) is presented as
where \(x=(x_{1},x_{2})\in R^{2}_{+}\), and \(G_{11}=(1-d)e^{-D_{1}T},G_{12}=de^{-D_{2}T}, G_{13}=(1-d)(1-e^{-D_{1}T})x_{1}^{0}+d(1-e^{-D_{2}T})x_{2}^{0}+\theta _{1}, G_{21}=de^{-D_{1}T}, G_{22}=(1-d)e^{-D_{2}T}, G_{23}=+d(1-e^{-D_{1}T})x_{1}^{0}+(1-d)(1-e^{-D_{2}T})x_{2}^{0}.\)
Being similar to reference [7], two lemmas are gotten.
Lemma 1
\(G^{n}(x)\rightarrow (x_{1}^{*},x_{2}^{*})\) (as \(n\rightarrow \infty \)) holds for \((x_{1},x_{2})\) of system (7).
Lemma 2
The solution \((\widetilde{x_{1}},\widetilde{x_{2}})\), which is defined as
is globally stable.
ii) Integrating on system (3), we have
From (9), we have \(c_{1}^{*}\) and \(c_{2}^{*}\) with
Obviously, for (9), \((c_{1}^{*},c_{2}^{*})\) is globally asymptotically stable.
Lemma 3
The globally asymptotically stable \((\widetilde{c_{1}},\widetilde{c_{2}})\) of (3) exists. and \(\widetilde{c_{1}},\widetilde{c_{2}}) \) are in reference [8], \(c_{1}^{*}, c_{2}^{*}\) are as (11), and \(c_{1}^{**}=c_{1}^{*}e^{-(g_{1}+m_{1})lT} +\frac{ f_{1}c_{2}^{*}(1-e^{-(h_{1}-g_{1}-m_{1})lT})}{(h_{1}-g_{1}-m_{1})},\) \(c_{2}^{**}=(1-\theta _{1})e^{-h_{1}lT}c^{*}_{2}.\)
Remark 4
There exist positive constants \(m_{0},M_{0},m_{e},M_{e}\), it is easy to get \(m_{0}\le c_{o}(t)\le M_{0}\) and \(m_{e}\le c_{e}(t)\le M_{e}\).
Similar to reference [7], we can obtain
Lemma 5
There exists a positive constant \(\lambda >0\), we can easily have \(x_{1}(t)\le [\delta (D_{1} x_{1}^{0}+D_{2} x_{2}^{0})+\frac{\theta \exp (\lambda T)}{\exp (\lambda T)-1}]e^{\lambda T_{1}}\), \(x_{2}(t)\le [\delta (D_{1} x_{1}^{0}+D_{2} x_{2}^{0})+\frac{\theta \exp (\lambda T)}{\exp (\lambda T)-1}]e^{\lambda T_{1}}\), \(Y(t)\le \delta (D_{1} x_{1}^{0}+D_{2} x_{2}^{0})+\frac{\theta \exp (\lambda T)}{\exp (\lambda T)-1}\), \(c_{0}(t)\le \delta (D_{1} x_{1}^{0}+D_{2} x_{2}^{0})+\frac{\theta \exp (\lambda T)}{\exp (\lambda T)-1}\), and \(c_{e}(t)\le \delta (D_{1} x_{1}^{0}+D_{2} x_{2}^{0})+\frac{\theta \exp (\lambda T)}{\exp (\lambda T)-1}.\)
4 Dynamical Analysis
Theorem 1
Suppose
and
hold, the globally asymptotically stable \((\widetilde{x_{1}},\widetilde{x_{2}},0,\widetilde{c_{1}}, \widetilde{c_{2}})\) exists, and \(x^{*}_{2}\), \(x^{**}_{2}\) are with (6), and \(c^{*}_{1},c^{**}_{1}\),\(c^{*}_{2},c^{**}_{2}\) are with in (10).
Proof
Doing it as \(y_{1}=x_{1}-\widetilde{x_{1}},y_{2}=x_{2}-\widetilde{x_{2}}, Y=Y, z_{1}=c_{1}-\widetilde{c_{1}},z_{2}=c_{2}-\widetilde{c_{2}}\), then, linear system with considering for one periodic solution \((\widetilde{x_{1}},\widetilde{x_{2}},0,\widetilde{c_{1}},\widetilde{c_{2}})\) is presented as
where \(K_{5}= -\frac{1}{\delta }\times \frac{\eta \widetilde{x_{2}(t)}}{\alpha +\widetilde{x_{2}(t)}},K'_{5}=-[D_{2}+\beta \widetilde{c_{1}(t)}-\frac{\eta \widetilde{x_{2}(t)}}{\alpha +\widetilde{x_{2}(t)}} ].\) Then, the fundamental solution matrix is
where \(K_{6}=e^{\int ^{t}_{0}(-D_{2}+\frac{\eta \widetilde{x_{2}(\xi )}}{\alpha +\widetilde{x_{2}(\xi )}}- \beta \widetilde{c_{1}(\xi )})d\xi },K'_{6}=e^{-(g_{1}+m_{1})t}.\) There is no need for computing \(\dagger ,\ddagger \).
When \(t=(n+l)T,\) we get
When \(t=(n+1)T,\) we also get
The stability of \((\widetilde{x_{1}},\widetilde{x_{1}},0,\widetilde{c_{1}},\widetilde{c_{2}})\) is decided by eigenvalues of
From condition (12), \(e^{-D_{1}\tau }<1\), and \(e^{-D_{2}\tau }<1\), the eigenvalues of M are presented as
where \(K_{7}=(1-d)(e^{-D_{1}T}+e^{-D_{2}T}), K'_{7}=(1-d)^{2}(e^{-D_{1}T}+e^{-D_{2}T})^{2}-4(1-2d)e^{-(D_{1}+D_{2})T}.\) For the Floquet theory [6] and condition (14), it is easily to have \(\gamma _{3}<1\), then, the locally stable \((\widetilde{x_{1}},\widetilde{x_{2}}, 0, \widetilde{c_{1}}, \widetilde{c_{2}})\) exists.
Choosing \(\varepsilon >0\), we have
where \(K_{8}=-D_{2}+\frac{\eta (\widetilde{x_{2}}+ \varepsilon )}{\alpha +(\widetilde{x_{2}}+ \varepsilon )}.\) We get \(\frac{dx_{2}}{dt}\le D_{2}(x^{0}_{2}-x_{2})\) with considering system (1). So
From lemma (2), and [8], we get
and
Therefore,
Then, \(Y(t)\le Y(0^{+})\exp [\int ^{t}_{0}(-D_{2}+\frac{\eta (\widetilde{x_{2}}+\varepsilon )}{\alpha +(\widetilde{x_{2}} +\varepsilon )}-\beta (\widetilde{c_{1}}-\varepsilon ))ds]\), thus
Hence \(Y(n\tau )\le Y(0^{+})\rho _{1}^{n}\) and \(Y(nT)\rightarrow 0\) as \(n\rightarrow \infty \). So \(Y(t)\rightarrow 0\) as \(t\rightarrow \infty \).
For \(\varepsilon >0\), it has a \(t_{0}>0\) such that \(0<Y<\varepsilon \) for all \(t\ge t_{0}\). It is no difficulty to gain
\((v_{1},v_{2})\), \((n_{1},n_{2})\) are of
and
respectively, while
with

For \(\varepsilon _{1}>0\), existing a \(t_{1}, t>t_{1}\) such that
and
One will gain the followings with considering \(\varepsilon \rightarrow 0\),
and
This completes the proofs.
Theorem 2
Suppose
and
hold, system permanence, and \(x^{*}_{2}\) and \(x^{**}_{2}\) are with (6), \(c^{*}_{1},c^{**}_{1}, c^{*}_{2},c^{**}_{2}\) are with (10).
Proof
Owing to remark (4), and lemma (5), we have obtain that \((x_{1},x_{2},Y,\) \(c_{1},c_{2})\) is bounded. It can be easily obtained that \(c_{1}\ge m_{o}\) and \(c_{2}\ge m_{e}\) with considering with remark (4).
Therefore,
with its comparison system
With considering (2) and (8), \((\widetilde{w_{1}},\widetilde{w_{2}})\) of (26) is
with
Furthermore, \((\widetilde{w_{1}},\widetilde{w_{2}})\) of (27) is globally asymptotic stable. Then, it exists a \(\varepsilon >0\) such that \(x_{1}\ge w_{1}\ge \widetilde{w_{1}}-\varepsilon \ge w^{*}_{1}-\varepsilon =k_{1}\) and \(x_{2}\ge w_{2}\ge \widetilde{w_{2}}-\varepsilon \ge w^{*}_{2}-\varepsilon =k_{2}\).
Since
\(m_{3}>0 \) and \(\varepsilon _{1}> 0\) can be selected to do as
where \(k^{*}_{2}\) is defined as (34)
\(Y<m_{3}\) will be proved that it can not be held for \( t\ge 0\). Otherwise,
with its comparison system
By lemma (2), we gain \(x_{1}\ge k_{1}, x_{2}\ge k_{2}\) and \(k_{1}\rightarrow \overline{k_{1}},k_{2}(t)\rightarrow \overline{k_{2}},\) as \(t\rightarrow \infty \), and
with

Therefore,
For \(t\ge T_{1}\)
Let \(K_{9}\in N^{+}\) and \(K_{9}\tau > T_{1}\), integrating (36) on \((nT,(n+1)T ), n\ge K_{9},\) we have
then \(Y((K_{9}+k)T)\ge Y(K_{9}T^{+})e^{k\sigma }\rightarrow \infty \), as \(k\rightarrow \infty \), it is an illogicality with the bounded Y. Hence \(Y\ge m_{3}\).
5 Discussion
In this work, we present a chemostat-type model with impulsive effects in a polluted karst environment. If it is supposed that the variables are shown in the table below:
\(x_{1}(0)\) | \(x_{2}(0)\) | Y(0) | \(c_{1}(0)\) | \(c_{2}(0)\) | \(D_{1}\) | \(D_{2}\) | \(x_{1}^{0}\) | \(x_{2}^{0}\) | \(\delta \) | \(\eta \) | \(\alpha \) | \(\beta \) | \(\theta _{1}\) | \(\theta _{2}\) | \(\theta _{3}\) | \(\theta \) | \(f_{1}\) | \(g_{1}\) | \(m_{1}\) | \(h_{1}\) | d | T |
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
2 | 2 | 2 | 0.13 | 0.15 | 2 | 0.2 | 2 | 3 | 1 | 0.5 | 2 | 0.5 | 0.5 | 0.8 | 0.6 | 0.01 | 0.4 | 0.3 | 0.1 | 0.4 | 0.2 | 1 |
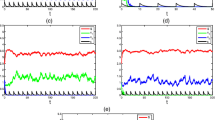
system (1) is permanent (one can see Fig. 1). If it is supposed that another variables are shown in the table below:
\(x_{1}(0)\) | \(x_{2}(0)\) | Y(0) | \(c_{1}(0)\) | \(c_{2}(0)\) | \(D_{1}\) | \(D_{2}\) | \(x_{1}^{0}\) | \(x_{2}^{0}\) | \(\delta \) | \(\eta \) | \(\alpha \) | \(\beta \) | \(\theta _{1}\) | \(\theta _{2}\) | \(\theta _{3}\) | \(\theta \) | \(f_{1}\) | \(g_{1}\) | \(m_{1}\) | \(h_{1}\) | d | T |
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
2 | 2 | 2 | 0.13 | 0.15 | 2 | 0.2 | 2 | 3 | 1 | 0.5 | 2 | 0.5 | 0.5 | 0.8 | 0.1 | 0.01 | 0.4 | 0.3 | 0.1 | 0.4 | 0.2 | 1 |
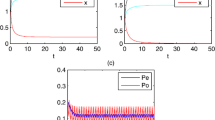
there exists a globally asymptotically stable solution \((\widetilde{x_{1}(t)},\widetilde{x_{2}(t)},0,\widetilde{c_{1}(t)},\) \(\widetilde{c_{2}(t)})\) of system (1) (one can see Fig. 2). If it is supposed that another variables are shown in the table below:
\(x_{1}(0)\) | \(x_{2}(0)\) | Y(0) | \(c_{1}(0)\) | \(c_{2}(0)\) | \(D_{1}\) | \(D_{2}\) | \(x_{1}^{0}\) | \(x_{2}^{0}\) | \(\delta \) | \(\eta \) | \(\alpha \) | \(\beta \) | \(\theta _{1}\) | \(\theta _{2}\) | \(\theta _{3}\) | \(\theta \) | \(f_{1}\) | \(g_{1}\) | \(m_{1}\) | \(h_{1}\) | d | T |
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
2 | 2 | 2 | 0.13 | 0.15 | 2 | 0.16 | 2 | 3 | 1 | 0.5 | 2 | 0.5 | 0.5 | 0.8 | 0.1 | 0.01 | 0.4 | 0.3 | 0.1 | 0.4 | 0.2 | 1 |
then, system (1) is permanent (see Fig. 3).
The simulations show that parameters \(0<\theta _{3}<1\) and \(D_{2}\) are very important for system (1). The parameters \(D_{1}, \theta _{1}, \theta _{2},\theta \) and d of system (1) can also be discussed. The results will guide us how to manage the source of water management in karst areas.

The permanence of system (1) with parameters in the first table.

The dynamics of the globally asymptotically stable microorganism-extinction with parameters in the second table.

The dynamics of the globally asymptotically stable microorganism-extinction with parameters in the third table.
References
Bo, L., Yi-Fan, Z., Bei-Bei, Z., Xian-Qing, W.: A risk evaluation model for karst groundwater pollution based on geographic information system and artificial neural network applications. Environ. Earth Sci. 77(9), 1–14 (2018). https://doi.org/10.1007/s12665-018-7539-7
Zhao, D., Yuan, S.: Noise-induced bifurcations in the stochastic chemostat model with general nutrient uptake functions. Appl. Math. Lett. 103, 106180 (2020)
Amster, P., et al.: Existence of -periodic solutions for a delayed chemostat with periodic inputs. Nonlinear Anal. Real World Appl. 55, 103134 (2020)
Yuan, H., Zhang, C., Li, Y.: Existence and stability of coexistence states in a competition unstirred chemostat. Nonlinear Anal. Real World Appl. 35, 441–456 (2017)
Liu, B., Chen, L.S., Zhang, Y.J.: The effects of impulsive toxicant input on a population in a polluted environment. J. Biol. Syst. 11, 265–287 (2003)
Bainov, D., Simeonov, P.: Impulsive differential equations: periodic solutions and applications. Longman, 66 (1993)
Jiao, J., Chen, L.: Global attractivity of a stage-structure variable coefficients predator-prey system with time delay and impulsive perturbations on predators. Int. J. Biomathematics 1, 197–208 (2008)
Jiao, J., Li, Q.: Dynamics of a stochastic eutrophication-chemostat model with impulsive dredging and pulse inputting on environmental toxicant. Adv. Differ. Equ. 2020(1), 1–16 (2020). https://doi.org/10.1186/s13662-020-02905-5
Author information
Authors and Affiliations
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2021 ICST Institute for Computer Sciences, Social Informatics and Telecommunications Engineering
About this paper

Cite this paper
Jiao, J. (2021). Dynamics of a Chemostat-Type Model with Impulsive Effects in a Polluted Karst Environment. In: Song, H., Jiang, D. (eds) Simulation Tools and Techniques. SIMUtools 2020. Lecture Notes of the Institute for Computer Sciences, Social Informatics and Telecommunications Engineering, vol 370. Springer, Cham. https://doi.org/10.1007/978-3-030-72795-6_6
Download citation
DOI: https://doi.org/10.1007/978-3-030-72795-6_6
Published:
Publisher Name: Springer, Cham
Print ISBN: 978-3-030-72794-9
Online ISBN: 978-3-030-72795-6
eBook Packages: Computer ScienceComputer Science (R0)