
Abstract
Dynamical systems contribute to the mathematical modeling of chemical reactions of biological or ecological phenomena producing limit cycle oscillations. In this study, we present a computational approach to examine the bifurcations of limit cycles of the two-dimensional simple chemical reaction model known as the Schnakenberg model. With our approach, we obtain conditions on parameters of the system of the chemical reaction model which gives Hopf bifurcation. Using the Lyapunov function we show the stability of Hopf bifurcation. We illustrate the results with a numerical example.
Access provided by Autonomous University of Puebla. Download conference paper PDF
Similar content being viewed by others

Keywords
1 Introduction
During biochemical reactions, which are the transformations of molecules to other molecules inside the cell, enzymes play roles of biological catalysts and change concentration rates [10]. Biochemical reactions enable cell functions such as digestion and respiration to reproduction and contribute to maintaining the life processes of living organisms. The biochemical reaction, named glycolysis, which is the destruction of glucose to enzymatic acid with enzymes to generate energy, happens in all living organisms. Moreover, in all living organisms, the same enzymes act in this reaction. The fluctuations in the concentrations of the substances lead to glycolytic oscillations, which depend on the concentration rates. The glycolytic oscillations were first observed experimentally by Duysens and Amesz [2]. This phenomenon is known as a fascinating biochemical reaction represented mathematically by a generalized version of the Schnakenberg model [13].
2 The Schnakenberg Model
In 1978, J. Schnakenberg introduced the simple chemical reaction system with a limit cycle behaviour, the so called Schnakenberg model, an autocatalytic chemical reaction model with oscillatory behaviour. This model is characterized by the following three chemical reactions that involve two chemical components and two chemical resources:
The dynamical system for this chemical reaction is obtained by considering the state variables x and y as the concentrations at a given time of the chemical substances X and Y which leads to the following system of ordinary differential equations:
Here, the parameters \(a>0\) and \(b>0\) denote the concentration rates of the chemical resources A and B, respectively.
To demonstrate the oscillations in this model, Hwang et al. [4] showed that the dimensionless system of the Schnakenberg model possesses at most one limit cycle in \(\mathbb {R}^2_+\). The nonexistence and existence of a positive non-constant steady-state solution to the Schnakenberg system are studied by Li, in 2011 [6]. In this paper, we investigate Hopf bifurcation for the Schnakenberg model by computing the Lyapunov function [12].
System (1) has one unique singular point at \(E=(a+b,\frac{a}{(a+b)^2})\), with the eigenvalues of Jacobian matrix given as
where
It is obvious that these eigenvalues are pure imaginary if
which simplifies to the condition \(0< a < 1\) and \((a+b)^3=a-b\). In this case the singularity at E can either be a center (all trajectories are closed), or a focus (all trajectories are spirals) [11]. When the condition
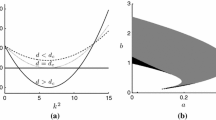
is satisfied, the singular point at E is a focus, if \((a + b) (1 + (a + b)^2) <0\) all trajectories in a neighborhood of E are moving towards the singularity E (stable focus) and if \((a + b) (1 + (a + b)^2) >0\) all trajectories in a neighborhood of E are moving away the singularity at E. For instance, Fig. 1a shows stable limit cycle of the system (1) with \(a=0.6\) and \(b=0.17037459017229974\) and eigenvalues are \(\lambda _{1,2}=-0.0178966 \pm 0.77016668i\) and Fig. 1b shows stable limit cycle of the system (1) with \(a=0.6\) and \(b=0.15037459017229974\) and eigenvalues are \(\lambda _{1,2}=0.01806962 \pm 0.75015699i\) [9].

a Stable and b unstable foci of system (1)
3 The Existence of Hopf Bifurcation
To study Hopf bifurcation for system (1), we first move the singular point E to origin by the linear transformation
and obtain
where X is rewritten as x, and Y as y. The necessary condition for the existence of Hopf bifurcation at the origin for system (5) is when the trace of the linear approximation of system (5)
is zero. This condition also satisfies that the real part of the eigenvalues is zero. The second necessary condition is for k(a, b) given in (3) to be negative. These two conditions, with additional two on parameters a and b for the chemical system, \(a,b>0\), form the following system of semi-algebraic equations:
System (16) can be solved using Mathematica routine Reduce [8] and we obtain
A commonly used approach for the determination of Hopf bifurcation is the computation of normal forms. However, in this work, we adopt an approach employing the Lyapunov function which we describe now. For a system
we can always find a function of the form
such that
Based on the Lyapunov Theorem of asymptotic stability [7], we determine the type of the focus stability by using the first nonzero coefficient \(g_i\) of the extension of
Then, a focus is stable if \(g_i\) is negative, and unstable if \(g_i\) is positive [1].
If the system is of the form
for which the trace of the linear approximation matrix is zero, the resulting expressions involve radicals. To avoid this, we search for a positive-definite Lyapunov function of the form
which satisfies (9). This is the case if the conditions
hold, and it is known that the quadratic form
is positive-definite if \(\alpha >0\) and \(4 \alpha \gamma - \beta ^2>0\). Inserting (11) into the expression
we obtain \(4 \alpha \gamma - \beta ^2=\frac{-\beta ^2(a_1^2+b_1c_1)}{a_1^2}\), and when the origin is a center or a focus for system (10), the quadratic form (12) is positive-definite [14].
Theorem 1
The singular point at the origin (or at E) of system (5) (or (1)) satisfying conditions (7) is a stable focus.
Proof
When (16) are satisfied, the eigenvalues of the linear approximation matrix of system (1) are
We look for a Lyapunov function up to degree 8,
satisfying the equation
One can see that
This condition can be determined by equating the coefficients of the same monomials on both sides of equation (15).
Let \(\beta =2,\) then \(\alpha =\frac{2a}{a - b}\), \(\gamma = 1\), and \(4\alpha \gamma -\beta ^2=\frac{4(a + b)}{a - b}>0\). For \(a>b\), the quadratic form (12) of (14) is positive-definite.
The first nonzero coefficient \(g_i\) is
The semi-algebraic system
is an unsolvable system (checked with Reduce of Mathematica). Since \(g_1<0\), the derivative with respect to a vector field is negative-definite. Hence the focus is stable [5].
Next theorem summarizes the conditions for the existence of Hopf bifurcation in system (1).
Theorem 2
For the parameters, a and b, that satisfy the conditions given in (7), Hopf bifurcation can occur at the singular point \(E=(a+b,\frac{a}{(a+b)^2})\) of system (1). The bifurcation is always supercritical, i.e., a stable limit cycle is born from E.
Proof
As demonstrated in the proof of the Theorem 1, the singular point that satisfies conditions (7) is a stable focus. By slightly varying the parameter b, we slightly perturb the system (1), changing the real parts of the eigenvalues (2) to positive. Hence, point E becomes an unstable focus, and the results is a stable limit cycle [3].
3.1 Numerical Example
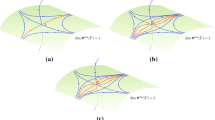
To show the existence of stable limit cycles, we choose parameters a and b as \(a=0.6\) and \(b=0.16037459017229974\). The corresponding system (1) has singular point at \(E=(0.760375,1.03776)\), the eigenvalues given in (2) are \(\lambda _{1,2}=\pm 0.760375i\) and the coefficient \(g_1\) of (15) is negative, \(g_1=-0.17187<0\). As we can see in Fig. 2a, the trajectories move towards the singular point E, i.e. E is stable focus. Now, we perturb b slightly as \(b=0.16037459017229974-\frac{1}{100}=0.150375\). Then, eigenvalues become \(\lambda _{1,2}=0.0180689 \pm 0.750157i\) with positive real parts. When we choose initial point (0.7, 1.05), we see that the trajectory moves away from singular point E, on the other hand, the second trajectory plotted from another initial point (0.6, 0.6) moves towards the singular point E. Both trajectories approach to the limit cycle as seen in Fig. 2b.
Note that if the eigenvalues are pure imaginary, the local phase portrait in the neighbourhood of the singularity can not be a center, since \(g_1\ne 0\) for positive values of a and b for system (1).

a Stable focus for parameter values \(a=0.6\) and \(b=0.16037459017229974\). b A supercritical Hopf bifurcation appearing for system (1) with \(a=0.6\) and \(b=0.150375\)
References
I.K. Aybar, O.O. Aybar, B. Fercec, V.G. Romanovski, S. Swarup Samal, A. Weber, Investigation of invariants of a chemical reaction system with algorithms of computer algebra. MATCH Commun. Math. Comput. Chem. 74, 465–480 (2015)
L.N.M. Duysens, J. Amesz, Fluorescence spectrophotometry of reduced phosphopyridine nucleotide in intact cells in the near-ultraviolet and visible region. Biochim. Biophys. Acta 24(1), 19–26 (1957)
B. Ferčec, Integrability and local bifurcations in polynomial systems of ordinary differential equations. Ph.D. Thesis, 2013
T.-W. Hwang, H.-J. Tsai, Uniqueness of limit cycles in theoretical models of certain oscillating chemical reactions. J. Phys. A 38(38), 8211–8223 (2005)
Y.A. Kuznetsov, Elements of Applied Bifurcation Theory (Springer, New York, 1995)
Y. Li, Steady-state solution for a general Schnakenberg model nonlinear anal. Real World Appl. 12, 1985–1990 (2011)
A.M. Liapunov, Stability of Motion, with a contribution by V. Pliss. Translated by F. Abramovici, M. Shimshoni (New York, Academic Press, 1996)
Mathematica 9.0 Wolfram Research Inc., https://www.wolfram.com
MATLAB 9.7 MathWorks 2019, https://www.mathworks.com
J.D. Murray. Mathematical Biology: I. An Introduction, 3rd edn. (Springer, New York, 2002)
L. Perko, Differential Equations and Dynamical Systems, Texts in Applied Mathematics, 7th edn. (Springer-Verlag, New York, 2001)
V.G. Romanovski, D.S. Shafer, The Center and Cyclicity Problems, A Computational Algebra Approach (Birkhauser, Boston-Basel-Berlin, 2009)
J. Schnakenberg, Simple chemical reaction systems with limit cycle behaviour. J. Theor. Biol. 81(3), 389–400 (1979)
Y. Xia, M. Grašič, W. Huang, V.G. Romanovski, Limit cycles in a model of olfactory sensory neurons. Int. J. Bifurcat. Chaos 29(3), 1950038 (2019)
Acknowledgements
This work is supported by the Slovenian Research Agency (research core no. “P1-0306” and the project no. “BI-TR/19-22-003”) and the Scientific and Technological Research Council of Turkey (TUBITAK) under project no. 119F017.
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2021 The Author(s), under exclusive license to Springer Nature Switzerland AG
About this paper

Cite this paper
Aybar, I.K., Ferčec, B., Aybar, O.O., Dukarić, M. (2021). Limit Cycles of the Schnakenberg Chemical Reaction Model. In: Skiadas, C.H., Dimotikalis, Y. (eds) 13th Chaotic Modeling and Simulation International Conference. CHAOS 2020. Springer Proceedings in Complexity. Springer, Cham. https://doi.org/10.1007/978-3-030-70795-8_8
Download citation
DOI: https://doi.org/10.1007/978-3-030-70795-8_8
Published:
Publisher Name: Springer, Cham
Print ISBN: 978-3-030-70794-1
Online ISBN: 978-3-030-70795-8
eBook Packages: Physics and AstronomyPhysics and Astronomy (R0)