
Abstract
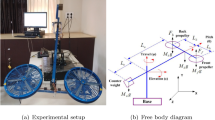
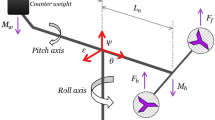
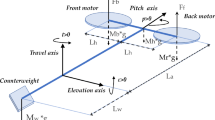
The 3-degree of freedom (DOF) helicopter is a benchmark aero-dynamical laboratory model having non-linear characteristics and open-loop unstable dynamics that make the control of such system for either posture stabilization or trajectory tracking a challenging task for the control community. This article investigates a linear quadratic regulator (LQR) based optimal solution for the position and attitude control problem of 3-DOF helicopter system with a prescribed degree of stability to achieve desired attitude (elevation and roll angles) and position (travel rate). Numerical simulations are demonstrated to verify the effectiveness of the proposed control scheme.
Access this chapter
Tax calculation will be finalised at checkout
Purchases are for personal use only
Similar content being viewed by others
References
Choudhary, S.K.: Design and analysis of an optimal orbit control for a communication satellite. Int. J. Commun. 9(1), 28–35 (2015)
Choudhary, S.K.: Optimal feedback control of twin rotor MIMO system with a prescribed degree of stability. Int. J. Intell. Unmanned Syst. 4(4), 226–238 (2016)
Choudhary, S.K.: Negative imaginary feedback control for a 3-DOF helicopter system. In: 2019 8th International Conference on Modeling Simulation and Applied Optimization (ICMSAO), pp. 1–6. IEEE (2019)
Choudhary, S.K., Raj, K., Muthukumar, V.: Optimal trajectory design and analysis for soft landing on the moon from lunar parking orbits. Int. J. Space Sci. Eng. 5(4), 321–338 (2019)
Googol Technology Ltd., \(3\) DOF Helicopter Experiment manual, Kowloon, Hon Kong (2009)
Hespanha, J.P.: Linear Systems Theory. Princeton University Press, Princeton (2009)
Kiefer, T., Graichen, K., Kugi, A.: Trajectory tracking of a \(3\) DOF laboratory helicopter under input and state constraints. IEEE Trans. Control Syst. Technol. 18(4), 944–952 (2010)
Kirk, D.E.: Optimal Control Theory: An Introduction. Courier Corporation, Chelmsford (2012)
Koo, T.J., Ma, Y., Sastry, S.: Nonlinear control of a helicopter based unmanned aerial vehicle model. IEEE Trans. Control Syst. Technol. (2001). https://people.eecs.berkeley.edu/~sastry/pubs/SastryAllJuly07/SastryALL/2002/KooNonlinear2002.pdf
Meza-Sánchez, I.M., Aguilar, L.T., Shiriaev, A., Freidovich, L., Orlov, Y.: Periodic motion planning and nonlinear \(\cal{H_\infty }\) tracking control of a \(3\) DOF underactuated helicopter. Int. J. Syst. Sci. 42(5), 829–838 (2011)
Naidu, D.S.: Optimal Control Systems. CRC Press, Boca Raton (2002)
Ng, A.Y., Coates, A., Diel, M., Ganapathi, V., Schulte, J., Tse, B., Berger, E., Liang, E.: Autonomous inverted helicopter flight via reinforcement learning. In: Ang, M.H., Khatib, O. (eds.) Experimental Robotics IX, pp. 363–372. Springer, Heidelberg (2006)
Saidi, A., Naceri, F., Vaidyanathan, S.: A new robust adaptive fuzzy synergetic control for nonlinear systems with an application to an inverted pendulum. Int. J. Model. Ident. Control 33(2), 89–97 (2019)
Swain, S.K., Sain, D., Mishra, S.K., Ghosh, S.: Real time implementation of fractional order PID controllers for a magnetic levitation plant. AEU Int. J. Electron. Commun. 78, 141–156 (2017)
Wright, S.: Model-based development of MAV altitude control via ground-based equipment. Int. J. Model. Identif. Control 28(4), 361–369 (2017)
Yu, Y., Zhong, Y.: Robust attitude control of a \(3\) DOF helicopter with multi-operation points. J. Syst. Sci. Complexity 22(2), 207–219 (2009)
Zaki, H., Alcan, G., Unel, M.: Robust trajectory control of an unmanned aerial vehicle using acceleration feedback. Int. J. Mechatron. Manuf. Syst. 12(3–4), 298–317 (2019)
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2021 Springer Nature Switzerland AG
About this paper

Cite this paper
Raj, K., Choudhary, S.K., Muthukumar, V. (2021). Linear Quadratic Regulator for Helicopter Model with a Prescribed Degree of Stability. In: Selvaraj, H., Chmaj, G., Zydek, D. (eds) Proceedings of the 27th International Conference on Systems Engineering, ICSEng 2020. ICSEng 2020. Lecture Notes in Networks and Systems, vol 182. Springer, Cham. https://doi.org/10.1007/978-3-030-65796-3_37
Download citation
DOI: https://doi.org/10.1007/978-3-030-65796-3_37
Published:
Publisher Name: Springer, Cham
Print ISBN: 978-3-030-65795-6
Online ISBN: 978-3-030-65796-3
eBook Packages: Intelligent Technologies and RoboticsIntelligent Technologies and Robotics (R0)