
Abstract
This paper proposes a transmission method using unmanned aerial vehicle (UAV) with distributed Space-Time Block Code (STBC) for multi-hop wireless relay networks in search and rescue operations. First, an UAV is considered to add to the hop with the minimum output signal-noise-ratio (SNR) and operates as a relay node to maintain the links between adjacency nodes in network, expand the transmission coverage area and improve the transmission performance. In addition, in order to overcome the difficulty in assigning the STBC patterns to the distributed relays and also alleviate the complexity of system design and implementation, the original STBC pattern is modified while keeping the same cooperative diversity gain. Finally, an algorithm is proposed to find out the optimal location of the added UAV in the hop, where the UAV has the best contribution to the data transmission performance between the transmitter and the receiver. It can be seen from the simulation results, the optimal location of the added UAV depends on not only the environment of real scenarios but also the distributed cooperative diversity gain. We can confirm that the proposed method achieves the significant performance improvement while keeping the simple operation of system for UAV communications in search and rescue operations.
Partly supported by Hanoi University of Mining and Geology (HUMG), Vietnam and Advanced Wireless and Communication Research Center (AWCC), The University of Electro-Communications (UEC), Tokyo, Japan.
Access provided by Autonomous University of Puebla. Download conference paper PDF
Similar content being viewed by others

Keywords
1 Introduction
The use of unmanned aerial vehicles (UAVs) is rapidly growing in the past few decades due to their broad range of application domains that include telecommunications, delivery of medical supplies, and search and rescue (SAR) operations [1]. Wireless networks with UAVs, commonly known as UAV communications, is also a subject that has attracted researchers’ attention in recent years. This is because UAV communications can provide reliable and cost-effective wireless connectivity for nodes without infrastructure coverage [2]. Multi-hop Wireless networks with UAVs are seen as a sub form of the well-known concept of Multi-hop Mobile ad-hoc network (MANET). Therefore, wireless networks with UAVs also share common features with MANET. Thanks to the distinctive characteristics such as independent, dynamic and self-adaptive natures, MANET is generally used in emergency communications. MANET is generally applicable to ensure connectivity in disaster relief situations that are usually hampered by the absence of a network or communication infrastructures [3]. The integration of communication systems with wireless medium and the growth of Internet technology has made MANET capable to operate and function during rapid emergency deployment without relying upon infrastructure communication systems. These characteristics make MANET suitable for the efficient communication during natural disaster and search and rescue operations [4, 5].
Besides sharing the common features with MANET above, there are several unique characteristics that make UAV communications more suitable with search and rescue operations, namely, mobility, topology changes, and radio propagation. UAVs are expected to be an important component of UAV communications for achieving high-speed wireless communications [6]. UAVs can adjust their altitude to avoid obstacles and enhance the likelihood of establishing line-of-sight (LoS) communication links to ground users. UAVs can also operate as wireless relays to provide wireless connectivity between two distant users or user groups without reliable direct links for improving transmission performance and coverage of ground wireless devices [2]. In addition, using UAVs as relay nodes for search and rescue operations in wireless communications can bring the many benefits as surveying the environment and collecting evidence about position of a mission person [7]. However, UAV communications are also faced with several new challenges such as highly dynamic network topologies, sparse and intermittent network connectivity, intelligent energy usage and replenishment, effective interference management, and so on. Therefore, new communication protocols, basic networking architecture, main channel characteristics, and performance enhancing techniques for UAV communications should be investigated [8].

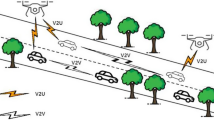
Multi-hop wireless relay network with the added UAV.
In UAV communications, orthogonal frequency division multiplexing (OFDM) scheme has proposed as a good candidate to obtain reliable and high performance wireless communication links [9, 10]. The guard interval of OFDM has tolerance to not only the influence of the delay spread but also the transmitting timing offset among distributed nodes. In wireless networks, a cooperative diversity is known as a technique allowing single-antenna nodes to reap some of the benefits of Multiple-Input Multiple-Output (MIMO) systems [11, 12]. Space-Time Block Code (STBC) encoding scheme is also often used to obtain the higher cooperative diversity gain without channel state information (CSI) which is referred as channel properties of a communication link at the transmitting node [13]. In addition, the STBC encoding scheme can achieve both full diversity order and full data transmission rate with simple decoding algorithm at the receiver. The diversity can also be obtained by using distributed relays in cooperative systems, where each pattern of STBC encoding is transmitted by the different relays [14]. Therefore, in this paper, the distributed cooperative diversity using STBC scheme is considered to use in UAV communications.
As mentioned above, once network infrastructure is destroyed by natural disaster, the connections between end users and communication system are disrupted. With the dynamic and self-configuring nature, UAV communications are a suitable solution for emergency communications in search and rescue operations. However, due to the communication distance or obstacles such as trees, hills and mountains and so on, the several links between adjacency nodes in multi-hop wireless networks can be disconnected. In multi-hop wireless networks, the transmission channel can be modeled as an equivalent single hop with the minimum output signal-noise-ratio (SNR). Therefore, the end-to-end performance of multi-hop communication systems can be derived based on the performance of the equivalent single hop [15]. As a result, when the performance of the single hop with the minimum output SNR is improved, the end-to-end performance of the system can also be improved.
Therefore, in this paper, an UAV is first considered to add to the hop with the minimum output SNR and operates as a relay to maintain the links between adjacency nodes in network, expand the transmission coverage area and improve the transmission performance as shown in Fig. 1. In addition, the distributed STBC cooperative systems have difficulty in assigning the STBC patterns to the distributed relays. In order to overcome this problem and also alleviate the complexity of system design and implementation, the original STBC pattern is modified. For the modified STBC pattern, the transmission signal is changed and encoded only at the UAV while keeping the same cooperative diversity gain in comparison with the original STBC pattern. The transmission signal from relay nodes is same to that from source node. Finally, an algorithm is proposed to find out the optimal location of the added UAV at the hop with the minimum output SNR. The proposed algorithm is based on the Received-Signal-Strength Indicator (RSSI) of the beacon packets to find out the optimal location of the UAV, where the UAV has the best contribution to the data transmission performance between the transmitter and the receiver. From the simulation results, we can confirm that the proposed method can achieve the significant performance improvement while keeping the simple operation of system for UAV communications in search and rescue operations.
The remainder of the paper is organized as follows. A system model and the proposed method are described in Sect. 2 and Sect. 3, respectively. Next, the performance is evaluated through simulation and results are presented and analyzed in Sect. 4. Finally, Sect. 5 concludes this paper.
2 Distributed STBC Cooperative Diversity System
The system under consideration consists of one transmitter, two distributed relays and one receiver, which are all single-antenna nodes, operating over slow, flat, fading channels as shown in Fig. 2. It is assumed that perfect channel state information (CSI) is available at receivers but not at transmitters. A time-division channel allocation is used for medium access, inter-relay interference therefore is not considered in the signal model. It is also assumed that the decode-and-forward (DF) protocol and the distributed STBC model with two transmit nodes (Tx) and one receive node (Rx) is considered to use in this paper. At the relays, the received signal from the transmitter is first decoded, and then re-encoded and forwarded to the receiver [16]. By using the different STBC patterns at the relays, the cooperative diversity gain of the maximum ratio combing (MRC) can be obtained in the receiver.

Distributed STBC cooperative diversity.
We assume that the input signal for the j-th symbol is \(s_j\), and the next symbol is \(s_{j+1}\), where \(j=2a\) and a is the even number. The \(s_j\) and \(s_{j+1}\) symbols are encoded and simultaneously transmitted from the transmitter and the UAV. The transmitted STBC patterns are shown in Table 1, where \(^*\) is the complex conjugate operation. At the receiver, the signals are received and combined with the different path losses and fading fluctuations. In order to simplify the explanation, we focus on an OFDM sub-carrier signal for explanation. At the first transmission or phase 1, the received signal of the \(s_j\) symbol at the i-th relay is given by,
where \({P_t}\) is transmission power. \({h_{ti}}\) and \({\beta _{ti}}\) are fading channel coefficient and path loss gain between the transmitter and the i-th relay, respectively. The path loss gain is calculated with \({\alpha }\) the path loss exponential, a constant whose measured value range from 1.6 to 6 [17]. \({n_{ji}}\) is noise component of the \(s_j\) symbol. At the next transmission or phase 2, both relays simultaneously transmit the data packet with the different STBC patterns as shown in Table 1. The received signals of the \(s_j\) and \(s_{j+1}\) symbols at the i-th receiver are expressed as follows,

where \({H_{ri}} = \sqrt{{P_t}} {\beta _{ri}}{h_{ri}}\) is channel response between the r-th relay in the current hop and the i-th relay in the next hop. \({n_{ji}}\) and \({n_{(j + 1)i}}\) are noise components. The received signals can be represented in term of vector \(\mathbf{y} \) as follows,
The Eq. (3) can also be written in term of matrix as follows,
where \(\mathbf{y}, H, \) and \(\mathbf{n} \) are \(2 \times 1\) matrices, \(\mathbf{s} \) is a \(2 \times 2\) matrix. Without loss of generality, after some elementary manipulations and conjugating the second row of (3), the received signals can be equivalently expressed as follows,
It can also be represented in term of matrix form,
where \(\tilde{\mathbf{y }}\), \(\mathbf{s} \), and \(\tilde{\mathbf{n }}\) are \(2 \times 1\) matrices, \(\mathbf{H} \) is a \(2 \times 2\) matrix. At the receiver, it is assumed that the channel response is known exactly, the combined signals can be obtained by multiplying both sides of Eq. (6) by \(\mathbf{H ^H}\) as follows,
Substituting (6) into (7), these combined signals can be written as follows,

where \(w_j=H_{r_{1}i}^*{n_{ji}}+H_{r_{2}i}n_{(j + 1)i}^*\) and \(w_{j+1}=H_{r_{2}i}^*{n_{ji}}-H_{r_{1}i}n_{(j + 1)i}^*\) are the noise components. These combined signals are then sent to the maximum likelihood detector to choose which symbol was actually transmitted from the transmitter by applying least squares (LS) detection,
where \({k \in \{ j,j + 1\}}\), \({\alpha = {\left| {{H_{r_{11}i}}} \right| ^2} + {\left| {{H_{r_{2}i}}} \right| ^2}}\), \({S_M}\) is the set of M transmitted symbols which is known at both the transmitter and receiver, and \({\left| . \right| }\) denotes a magnitude operator. As a result, the diversity gain of the maximum ratio combing (MRC) can be obtained if the channel response is known exactly at the receiver. By using the cooperative diversity with distributed STBC encoding, the network diversity gain can be obtained in this system. Then the decoded signals \(\tilde{s}_j\) and \(\tilde{s}_{j + 1}\) can be detected.
3 Proposed Method
In this method, it is assumed that the location of relays and wireless transmission environment are known by the added UAV. The Received-Signal-Strength Indicator (RSSI) between nodes can be determined by the beacon packets in network. In the multi-hop wireless networks, the transmission channel can be modeled as an equivalent single hop with the minimum output signal-noise-ratio (SNR). Therefore, the end-to-end performance of multi-hop communication systems can be derived based on the performance of the equivalent single hop [15]. As a result, when the performance of the single hop with the minimum output SNR is improved, the end-to-end performance of the system can also be improved. In this method, it is also assumed that the hop with the minimum output SNR of the multi-hop wireless network is determined based on the information of RSSI between relays at each hop in network. The RSSIs from the added UAV to the transmitter and the receiver at the hop are also known as shown in Fig. 3.
An UAV is first jointed at the hop and operates as a distributed relay in order to improve the transmission performance of the hop, which in turn leads to improving the end-to-end performance of system. Next, in order to overcome the difficulty in assigning the STBC patterns to the distributed relays and also alleviate the complexity of system design and implementation, the original STBC pattern is modified as shown in Table 2.
It can be seen from the table that the transmission signal is changed only at the added UAV and the same at the transmitter. An algorithm is then also proposed to find out the optimal location of the added UAV at the hop with the minimum output SNR of the multi-hop wireless relay networks. This algorithm is based on the RSSI of the beacon packets, where the UAV has the best contribution to the data transmission performance of Bit Error Rate (BER) between the transmitter and the receiver.

STBC cooperative diversity.
In this method, only the hop with the minimum output SNR in the multi-hop wireless network is considered. At the hop, the distance from transmitter to the receiver is larger than transmission range and there are no any existing relays between the transmitter and receiver as shown in Fig. 4. However, the signal from the transmitter can still be sensed or received weakly at the receiver. This is because the signal is much attenuated by the obstacles such as tree, building, hill or mountain and the distance between the transmitter and the receiver. As a result, this hop is identified as broken and has the minimum output SNR in multi-hop wireless networks. Therefore, an UAV is added in order to maintain the connection and improve the transmission performance of the hop. The signal description for this case as follow. Similarly to Eq. (1), at the first time slot or phase 1, the received signal of the \(s_j\) symbol at the UAV and the receiver are given by Eqs. (10) and (11), respectively,
where \(h_{tu}\) and \(h_{tr}\) are channel response between the transmitter and UAV, and between the transmitter and the receiver, respectively. At the UAV, the received signal is first decoded, and then re-encoded according to the modified STBC pattern in Table 2 and forwarded to the receiver in phase 2. The signal is also transmitted from the transmitter to the receiver in phase 2. At the receiver, the received signals of the \(s_j\) and \(s_{j+1}\) symbols from the transmitter and the UAV in phase 2 are combined and expressed as follows,

The received signals can be represented in term of vector \(\mathbf{y} \) as follows,
The Eq. (13) can also be written in term of matrix as the Eq. (3). The orthogonality of the modified STBC encoding pattern can be verified by,
where \({(.)^H}\) denotes Hermitian conjugate, \(\mathbf{s _1}\) and \(\mathbf{s _{2}}\) are the first and second column vector of matrix \(\mathbf{s} \), respectively. As a result, in comparison with the original STBC encoding patterns, the cooperative diversity gain of the modified STBC encoding patterns can be obtained is the same. For the modified STBC patterns, the transmitter or source node transmits the \(s_j\) and \(s_{j+1}\) original symbols, which is similar to the symbols transmitted in multi-hop Single-Input and Single-Output (SISO) transmissions. The symbols are encoded by the only UAV in order to alleviate complexity of system. At the receiver, if the channel response is known exactly, the decoded signals of the \(s_j\) and \(s_{j+1}\) symbols are derived as follows,

In these equations, the noise components are omitted to keep the presentation simple.
In the case that, the received signal from the transmitter in phase 1 is stored at the receiver. In phase 2, the signal retransmitted from the transmitter is combined with the signal from the UAV and the signal stored in phase 1, the received signal at the receiver can be expressed as follows,
where \(m=1, 2\) means that the signal from transmitter in phase 1 and phase 2, respectively. Similarly to Eq. (15), the decoded signals of the \(s_j\) and \(s_{j+1}\) symbols are derived as follows,
The SNR of the received signal at the receiver \(({\gamma })\) for both \(s_j\) and \(s_{j+1}\) symbols from the transmitter can be derived by using Eqs. (17) and (18),
where \({E_t}\) and \({E_r}\) is the average signal energy at the transmitter and the receiver, respectively. \({N_0}\) is the noise power. The SNR values for the channels from the transmitter to the UAV \(({\gamma _{tu}})\) and from the UAV to the receiver \(({\gamma _{ur}})\) without using STBC encoding can be expressed as follows,


where \(\alpha \) is the path loss exponential. When the distance between the transmitter and the receiver is denoted \(d_{tr}\) and normalized to 1, \(0 \le x \le 1\) indicates the relative location of the UAV with respect to the receiver [18]. \(x = 0\) means that the UAV is located at the transmitter according to horizontal axis. The height of the UAV is denoted by l. The value of l is determined based on real scenarios so that l minimizes and ensures the links from the UAV to the transmitter and the receiver are Light of Sight (LoS). As shown in Fig. 4, the distance from the transmitter to the UAV and from the UAV to the receiver are denoted by \(d_{tu} = {({x^2} + {l^2})^{1/2}} \) and \({d_{ur}} = {({{(1 - x)}^2} + {l^2})^{1/2}} \), respectively. The SNR of the received signal at the receiver when UAV transmitting the symbols with using STBC can be derived as follows,
where G is the cooperative diversity gain of using STBC encoding. The maximum diversity gain (G) can be expressed as the number of independent channels in the multiple antennas systems as follows, \({G} = {N_t} \times {N_r}\), where \({N_t}\) and \({N_r}\) are the number of transmit and receive antennas, respectively [19]. In order to determine the optimal location of the UAV, it is assumed that the transmit power of all nodes and the location of the transmitter and the receiver are fixed. We also assume that the channels from the transmitter to the UAV and from the UAV to the receiver are symmetric fading channels. Since the RSSI decreases when the distance between the transmitter and the receiver increases, which leads to the increasing of packet error rate (PER), the optimal location of the UAV must be on the vertical plane that passes through the transmitter and the receiver as shown in Fig. 4. However, in real scenarios, there can be obstacles between the transmitter and the receiver. The packet transmission error probability of the flat fading channel from the transmitter and the receiver can be expressed by,
where E is the amplitude of received signal at the receiver, \(P_{R_r}\) is the probability density function (pdf) of received signal envelope of fading distribution. \({P_0}\) is PER of a receiver with input signal power of \(\frac{E^2}{2}\). The packet transmission error probability with the UAV operating as an intermediary node and using STBC encoding can be expressed by,
where \({P_{s_{tu}}}\) is the packet transmission success probability from the transmitter to the UAV in phase 1. \(P_{{s_{tur}}}^{(STBC)}\) is the packet transmission success probability by combining the received signals from the transmitter and the UAV to the receiver in phase 2 and the stored signal from the transmitter in phase 1. \({P_{{e_{tur}}}}\) is the packet transmission error probability for both phase 1 and 2. Since the location of the transmitter, the receiver and the transmit power are fixed, the value of \({P_{{e_{tr}}}}\) does not change in this case.

The hop with the added UAV in network.
Next, an optimization algorithm is proposed in order to find the optimal location of the added UAV which maximizes the final data transmission performance at the receiver. From the Eq. (24), the packet transmission error probability \({P_{{e_{tur}}}}\) reaches the minimum value when \(\{{P_{{s_{tu}}}}P_{{s_{tur}}}^{(STBC)}\}\) is maximum. Both \({P_{s_{tu}}}\) and \(P_{{s_{tur}}}^{(STBC)}\) depend on the UAV location. More specifically, when the distance from the UAV to the transmitter is small, the distance from the UAV to the receiver is large and vice versa. As a result, \({P_{s_{tu}}}\) is large but \(P_{{s_{tur}}}^{(STBC)}\) is small, and vice versa. In other words, the value of \({P_{{e_{tur}}}}\) depends on the height of UAV l and the location of UAV x. With the assumptions as the above mentioned and a fixed transmission power level for nodes, \({P_{{e_{tur}}}}\) can be expressed by the empirical function as follow,
The value of \({\gamma _{\{ x,l\} }}\) is determined by the Eq. (29),
where \({\gamma _{tu}}\) and \({\gamma _{tur}^{(STBC)}}\) are calculated according to Eqs. (19) and (22), respectively. Due to function f of the Eq. (28) is a decreasing function, \({P_{{e_{tur}}}}\) value reaches the minimum when \({\gamma _{\{ x,l\} }}\) is maximum.

The algorithm is proposed in order to find out the optimal location of the UAV so that \({\gamma _{\{ x,l\} }}\) is maximum. The proposed algorithm is described in detail in Algorithm 1. In this algorithm, the first condition is that the added UAV is within the transmission range of both transmitter and receiver. In other words, the received SNR values \({\gamma _{tu}}\) and \({\gamma _{ur}}\) are greater than the received SNR threshold \({\gamma _{th}}\). The height of UAV l is then determined so that the links from both transmitter and receiver to the UAV are Light of Sight (LoS) or least affected by the obstacles and nearest to the straight line connected directly between the transmitter and the receiver. Next, the search boundaries and the number of steps are set. The values x and l are divided into small steps within the search boundaries. Finally, \({\gamma _{\{ x,l\} }}\) is calculated based on the beacon packets and compared in order to find the maximum value.
4 Performance Evaluation
4.1 Simulation Conditions
In order to evaluate the performance of the proposed method, three nodes are configured as shown in Fig. 4. In this scenario, the distance from the transmitter to the receiver is 300 [m]. As mentioned above, this distance is normalized to 1, x indicates the relative location of the UAV in comparison with the transmitter and the receiver, \(0 \le x \le 1\). \(x = 0\) and 1 mean that the UAV is located at the transmitter and the receiver according to horizontal axis, respectively. The transmission range is set to 250 [m]. Therefore, the horizontal search boundary is set from \({x_{start}} = 0.15\) to \({x_{end}} = 0.85\). The vertical search boundary is set from 1.5 [m] to 100 [m], corresponding to \({l_{start}} = 0\) and \({l_{end}} = 1\) for vertical axis. The signal is transmitted at the frequency band of 2.4 GHz [20]. The free space path loss exponent is set to 2 in this simulation [21]. The other simulation conditions are listed in Table 3. In this simulation, it is also assumed that the UAV is static and the delay of all paths from nodes is received within the guard interval of OFDM, therefore, the inter symbol interference (ISI) is not considered. In this method, the modified STBC patterns shown in Table 2 are assigned for the UAV in each sub-carrier.

The transmission performance with the different location of UAV (x) on horizontal axis.
4.2 Simulation Results
First, the bit error rate (BER) of the proposed method with the different locations of the UAV (x) on horizontal axis is shown in Fig. 5. In this simulation, the horizontal location of the UAV is varied from \(x=0.15\) to \(x=0.85\). The vertical location of the UAV is fixed \(l=0.5\). Transmit power is set to be 15 [dBm]. From the figure, direct transmission means that the signal is received directly from the transmitter. Since the receiver is out of the transmission range of the transmitter, direct transmission does not achieve a good performance, only approximately \(10^{-2}\). This is because that the radio signal is attenuated by radiation in space and affected by fading. When an UAV operates as a relay and STBC encoding is not used, which is named UAV transmission without STBC, the performance is improved significantly in comparison with that of direct transmission. It can be seen that the best performance can be obtained when the location of the UAV is in the approximately middle, \(x=0.45\). This is because that the signal from the transmitter is received and decoded by the UAV then forwarded to the receiver. The signal transmitted in phase 1 from the transmitter to the UAV and phase 2 from the UAV to the receiver is the same. As mentioned in Sect. 3, the channels from the transmitter to the UAV and from the UAV to the receiver are symmetric fading channels. In this simulation, the signal in phase 2 is also retransmitted to the receiver to get better performance. Therefore, when the UAV is in the approximately middle, the performance of system can reach to the best value. In order to get cooperative diversity gain, STBC encoding is used at the UAV. Due to the STBC cooperative diversity gain, UAV transmission with STBC encoding has much better performance than UAV transmission without STBC encoding. From the figure, the best performance can be obtained in this case when the location of UAV is about 60 [m] from the transmitter or \(x=0.2\). This is because that the signal is encoded according to Table 2 and transmitted from both the UAV and the transmitter to the receiver in phase 2. Therefore, STBC cooperative diversity gain can be obtained, which in turn leads to the significant improvement of performance in phase 2. As a result, the optimal location of the UAV on horizontal axis will move to the transmitter depending on the cooperative diversity gain. Next, in order to improve the performance of system, the signal transmitted from the transmitter to the receiver in phase 1 is stored at the receiver and then combined with the signal transmitted from both the transmitter and the UAV in phase 2. From the figure, the performance of the UAV transmission with STBC and combining signal is better performance than that of UAV transmission with STBC. However, the optimal location of the UAV on horizontal axis is the same. This is because the combining signal leads to higher SNR at the receiver in phase 2 but the STBC cooperative diversity gain does not increase. Therefore, the optimal location of UAV does not change in this case as shown in Fig. 6.

The transmission performance with combining signal.

The transmission performance with the different location of UAV (l) on vertical axis.

The transmission performance with different transmit power.
Next, the effect of the different location of the UAV (l) according to vertical axis on the performance of system is shown in Fig. 7. In this simulation, the vertical location of the UAV is varied from \(l=0.1\) to \(l=0.9\). The horizontal location of the UAV is fixed \(x=0.2\). Transmit power is also set to be 15 [dBm]. It can be seen from the figure that the performance decreases slightly when l value increases. The reason is that when l value increases, the distance from the transmitter to the UAV and also from the UAV to the receiver is greater. However, the different distance is quite small. Therefore, the SNR at the receiver only decreases slightly. This leads to a slight decrease in the performance of system. As a result, the effect of the different location of the UAV (l) on vertical axis on the performance of system is quite small.
Finally, Fig. 8 shows the performance of system with the different transmit powers. From the figure, since the added UAV operates as a relay, the performance of the UAV transmission is improved significantly in comparison with the direct transmission, about 5 [dB]. It can be seen that the UAV transmission with STBC encoding also achieves much better performance than both direct transmission and UAV transmission. This is because that STBC cooperative diversity gain can be obtained in this case. In order to get higher performance, the signals in both phase 1 and phase 2 are combined at the receiver. As a result, the performance is also slightly improved for the UAV transmission with STBC and combining signal, about 1.5 [dB] in this scenario.
5 Conclusion
In this paper, a transmission method using UAV and distributed STBC encoding for multi-hop wireless relay networks is proposed to use in search and rescue operations. First, an UAV is considered to add to the hop with the minimum output signal-noise-ratio (SNR) and operates as a relay node to maintain the links between adjacency nodes in network, expand the transmission coverage area and improve the transmission performance. Next, in order to overcome the difficulty in assigning the STBC patterns to the distributed relays and also alleviate the complexity of system design and implementation, the original STBC pattern is modified while keeping the same cooperative diversity gain. Finally, an algorithm is proposed to find out the optimal location of the added UAV in the hop, where the UAV has the best contribution to the data transmission performance between the transmitter and the receiver. It can be observed from the simulation results that the optimal location of the UAV depends on not only the environment of real scenarios but also the cooperative diversity gain. In order to achieve the best performance of system in this scenario, the UAV should be located at \((0.2 \le x \le 0.3)\) according to horizontal axis and \((0.5 \le l \le 0.9)\) according to vertical axis. We can also confirm that the proposed method achieves the significant performance improvement while keeping the simple operation of system for UAV communications in search and rescue operations.
References
Valavanis, K.P., Vachtsevanos, G.J. (eds.): Handbook of Unmanned Aerial Vehicles. Springer, Dordrecht (2015). https://doi.org/10.1007/978-90-481-9707-1
Mozaffari, M., et al.: A tutorial on UAVs for wireless networks: applications, challenges, and open problems. IEEE Commun. Surv. Tutor. 21(3), 2334–2360 (2019)
Onwuka, E., et al.: MANET: a reliable network in disaster areas. J. Res. Natl. Dev. (JORIND) 9(2), 105–113 (2011)
Anjum, S.S., Noor, R.M., Anisi, M.H.: Review on MANET based communication for search and rescue operations. Wirel. Pers. Commun. 94(1), 31–52 (2015). https://doi.org/10.1007/s11277-015-3155-y
Loo, J., Mauri, J.L., et al.: Mobile Ad Hoc Networks: Current Status and Future Trends. CRC Press, Boca Raton (2012)
Li, B., et al.: UAV communications for 5G and beyond: recent advances and future trends. IEEE Internet Things J. 6(2), 2241–2263 (2019)
Waharte, S., Trigoni, N.: Supporting search and rescue operations with UAVs. In: 2010 International Conference on Emerging Security Technologies, September 2010. IEEE (2010)
Zeng, Y., et al.: Wireless communications with unmanned aerial vehicles: opportunities and challenges. IEEE Commun. Mag. 54(5), 36–42 (2016)
Wu, Z., et al.: Performance evaluation of OFDM transmission in UAV wireless communication. In: 2005 Thirty-Seventh Southeastern Symposium on System Theory, March 2005. IEEE (2005)
Vahidi, V., et al.: Orthogonal frequency division multiplexing and channel models for payload communications of unmanned aerial systems. In: 2016 International Conference on Unmanned Aircraft Systems (ICUAS), June 2016. IEEE (2016)
Sendonaris, A., Erkip, E., Aazhang, B.: User cooperation diversity-part I: system description. IEEE Trans. Commun. 51(11), 1927–1938 (2003)
Sendonaris, A., Erkip, E., Aazhang, B.: User cooperation diversity part II: system description. IEEE Trans. Commun. 51(11), 1939–1948 (2003)
Alamouti, S.M.: A simple transmit diversity technique for wireless communications. IEEE J. Sel. Areas Commun. 16(8), 1451–1458 (1998)
Harshan, J., Rajan, B.S.: Distributed space-time block codes for two-hop wireless relay networks. J. Commun. 5(4), 282–296 (2010)
Bao, V.N.Q., Kong, H.Y.: A simple performance approximation for Multi-hop decode-and-forward relaying over Rayleigh fading channels. IEICE Trans. Commun. E92-B(11), 3524–3527 (2009)
Laneman, J.N., Tse, D.N.C., Wornell, G.W.: Cooperative diversity in wireless networks: efficient protocols and outage behavior. IEEE Trans. Inf. Theory 50(12), 3062–3080 (2004)
Goldsmith, A.: Wireless Communications. Cambridge University Press, Cambridge (2005)
Obiedat, E.A., Cao, L.: Soft information relaying for distributed turbo product codes (SIR-DTPC). IEEE Signal Process. Lett. 17(4), 363–366 (2010)
Dohler, M., Li, Y.: Cooperative Communications Hardware, Channel and PHY. Wiley, Hoboken (2010)
Atoev, S., Kwon, O., et al.: An efficient SC-FDM modulation technique for a UAV communication link. Electron. J. 7(12), 352–370 (2018)
Mozaffari, M., Debbah, M., et al.: Unmanned aerial vehicle with underlaid device-to-device communications: performance and tradeoffs. IEEE Trans. Wirel. Commun. 15(6), 3949–3963 (2016)
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2020 ICST Institute for Computer Sciences, Social Informatics and Telecommunications Engineering
About this paper

Cite this paper
Diem, CH., Fujii, T. (2020). An UAV and Distributed STBC for Wireless Relay Networks in Search and Rescue Operations. In: Vo, NS., Hoang, VP. (eds) Industrial Networks and Intelligent Systems. INISCOM 2020. Lecture Notes of the Institute for Computer Sciences, Social Informatics and Telecommunications Engineering, vol 334. Springer, Cham. https://doi.org/10.1007/978-3-030-63083-6_5
Download citation
DOI: https://doi.org/10.1007/978-3-030-63083-6_5
Published:
Publisher Name: Springer, Cham
Print ISBN: 978-3-030-63082-9
Online ISBN: 978-3-030-63083-6
eBook Packages: Computer ScienceComputer Science (R0)