
Abstract
Hydrogeological hazards now exacerbated by the ongoing climate change pose serious challenges for the safety of the population worldwide. Among the others, the landslide risk can be mitigated by setting up efficient and reliable early warning systems. To date, rainfall thresholds are one of the most used tools to forecast the possible occurrence of rainfall-induced failures in large regions. In Italy a dense rain gauge network with hourly or sub-hourly temporal resolution is available. However, in some developing countries, where ground measurements are still absent or are available at coarser (daily) temporal resolution, satellite-based rainfall estimates could be a vital alternative. For this purpose, the reliability of rainfall thresholds defined using both satellite (SB) and ground-based (GB) data and with hourly or daily temporal resolution is assessed in a study area comprising the Abruzzo, Marche and Umbria regions (AMU), central Italy. The comparison between the performance of the different products allows to test their capability in eventually can GB rainfall measurements are gathered at hourly time steps (OBS-H) from a national network and aggregated on a daily scale (OBS-D); SB rainfall estimates are retrieved from the Climate Prediction Center Morphing Technique (CMORPH, hourly resolution), and from the SM2RASC product, based on the application of SM2RAIN algorithm to ASCAT (Advanced SCATterometer) soil moisture product (daily resolution). Results show that thresholds defined with GB rainfall data perform better than those obtained using SB estimates regardless of the temporal resolution. CMORPH and SM2RASC thresholds are still able to predict landslide occurrence although with a high number of false predictions.
Access provided by Autonomous University of Puebla. Download chapter PDF
Similar content being viewed by others

Keywords
Introduction
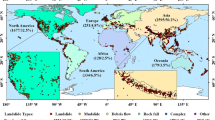
 Everywhere in the world is by far evident that climate change has exacerbated hydrogeological hazards (Seneviratne et al. 2012). Since the early twenty-first century, the global temperature growth is considered to be related to ever-increasing rainfall intensities (e.g., Trenberth et al. 2003; Watterson and Dix 2003; Hegerl et al. 2004). Such peaks of precipitation are able to enhance the triggering of rapid and very rapid landslides (e.g. debris flows, soil slips) that usually do not leave people time to get rescued.
Everywhere in the world is by far evident that climate change has exacerbated hydrogeological hazards (Seneviratne et al. 2012). Since the early twenty-first century, the global temperature growth is considered to be related to ever-increasing rainfall intensities (e.g., Trenberth et al. 2003; Watterson and Dix 2003; Hegerl et al. 2004). Such peaks of precipitation are able to enhance the triggering of rapid and very rapid landslides (e.g. debris flows, soil slips) that usually do not leave people time to get rescued.
The global rise of temperature poses serious challenges in forecasting a likely rising occurrence of rainfall-induced landslides. Indeed, July 2019 was the month with the highest number of fatal landslides in the world, claiming the life of 358 people (Petley 2019). Alongside the need to review the land use policies, there is an increasing need for set up efficient and reliable landslide early warning systems. The challenge is global but the means to defend oneself are not always up to it everywhere. Most of the early warning systems for rainfall-induced landslides in the world are based on rainfall thresholds (Piciullo et al. 2018; Guzzetti et al. 2020), which are in turn mostly based on rain gauge measurements (Guzzetti et al. 2008; Segoni et al. 2018). Most of the areas which face with problems related to rainfall-triggered landslides do not have dense rain gauge networks or even they do not have any. In this case, the use of satellite-based (SB) rainfall data could be the only way to get prompt information on the (estimated) cumulated rainfall. It has been found that satellite rainfall products underestimate the precipitation responsible for landslides if compared to ground-based (GB) measurements (Rossi et al. 2017; Brunetti et al. 2018), thus resulting in lower cumulated event rainfall–rainfall duration (ED) threshold curves. However, such underestimation does not affect the product performance in terms of capability of detecting rainfall events resulting in landslides.
Another issue is that in many countries the temporal resolution of the rainfall measurements is daily thus hampering the up-to-date monitoring of the event. In this case, rainfall thresholds must be represented by equations where the duration D is in days (d) instead of hours (h), since the thresholds are valid only for D values multiple of days (Gariano et al. 2020).
The reliability of preventing landslide hazard using SB or GB data and with hourly or daily temporal resolution is assessed in a regional area of Central Italy (Fig. 1), which is used as a benchmark case study. The selected area includes three administrative regions, Abruzzo, Marche and Umbria (AMU). In this study area, ED rainfall thresholds are defined and validated both from GB and SB rainfall data at hourly and daily temporal resolutions.

Landslide distribution in AMU (Abruzzo-Marche-Umbria) study area
Data and Methods
GB rainfall measurements are obtained at hourly time steps (OBS-H) from a rain gauge network managed by the Italian national Civil Protection Department. GB data are even aggregated on a daily scale (OBS-D) to simulate how performance changes when the landslide occurrence is predicted with lower temporal resolution data. SB rainfall estimates available in the area include the Climate Prediction Center Morphing Technique (CMORPH, Joyce et al. 2004), and the SM2RASC product that is based on the application of SM2RAIN algorithm (Brocca et al. 2014) to ASCAT (Advanced SCATterometer) soil moisture product (Wagner et al. 2013). Soil moisture data come from the Metop-A and -B satellite, and have a native spatial resolution of 25 km and a daily temporal resolution. The SM2RASC product specifically developed for Italy for the period 2008–2015 has been enhanced to 12.5 km after observation resampling. CMORPH rainfall estimates are obtained from the Climate Prediction Center of the National Oceanic and Atmospheric Administration (NOAA). Here the high-resolution product (8 km at the equator every 30 min) is used at hourly steps.
Most of the landslides used here (231) are from a published catalogue (Peruccacci et al. 2017) whereas 33 are found online for a total of 264 rainfall-induced slope failures in the 8-year period 2008–2015. The main sources of landslide information are digital and printed newspapers, blogs, technical documents, and landslide event reports (mostly coming from Fire Brigade archives). The location of the rainfall-induced landslides is shown in Fig. 1 (yellow dots).
The occurrence time of the failure is determined more or less accurately based on the information available (Peruccacci et al. 2017). For daily rainfall measurements (SM2RASC and OBS-D) the landslide is arbitrarily set at the end of the day.
Landslide information is combined with both GB and SB rainfall data using a tool that automatically reconstructs the (D, E) rainfall conditions responsible for the landslides and calculates ED rainfall thresholds (Melillo et al. 2018). The thresholds are calculated adopting a frequentist method proposed by Brunetti et al. (2010), and modified by Peruccacci et al. (2012). The threshold is a power law curve
where E is the cumulated event rainfall (in mm), D is the duration of the rainfall event (in hours or days), α is a scaling parameter (the intercept), γ is the slope (the scaling exponent), and Δα and Δγ are the uncertainties associated with α and γ, respectively. The method allows calculating thresholds at any non-exceedance probability (NEP). As an example, 5% ED thresholds are expected to leave 5% of (D,E) rainfall conditions below the threshold line.
The validation of the thresholds is used (i) to compare the performance of the GB and SB rainfall products, and (ii) to obtain the NEP value at which the threshold performs the best for each product. For the purpose, 80% of all the (D,E) rainfall conditions with landslides are selected randomly (100 times), and are used to define the curves at increasing NEPs (0.005, 0.5, 1, 1.5, 2, 3, 5, 10, 15, 20, 25, 30, 35, 40, 45, 50). Then, the remaining 20% is used to validate the thresholds using them as binary classifiers of rainfall events that triggered or did not trigger landslides. This allows building a contingency table where a (D, E) pair with landslide above the given threshold is a true positive (TP), and below is a false negative (FN). Analogously, a rainfall event without landslides above the threshold is a false positive (FP), and below is a true negative (TN). Finally, TPR (true positive rate or hit rate) and the FPR (false positive rate or false alarm rate) skill scores are calculated at the selected NEP values:
and are used to perform the receiver operating characteristic (ROC) analysis (Fawcett 2006) for the four data sets. The performance of the GB and SB rainfall products is then assesses based on the minimum distance δ of their ROC curve from the perfect classification point PCP (Gariano et al. 2015).
Results
In the following, the capability of the SB rainfall products at hourly and daily temporal resolution to forecast rainfall-induced landslides using the GB rainfall product as a reference is assessed. Based on the methods and approaches described above, the rainfall thresholds for the hourly-resolution (CMORPH and OBS-H), and the daily-resolution products (SM2RASC and OBS-D) are calculated and validated.
Rainfall Thresholds
Figure 2 portrays the thresholds at 5% NEP for the OBS-H (T5,OBS-H) and CMORPH (T5,CMORPH) data sets, which have both a temporal resolution of one hour. Note that the adopted tool does not reconstruct the rainfall conditions for all the 264 landslides as in some cases the rain is absent or it is negligible. This happens more frequently when using SB estimates. The two curves are somewhat parallel, but the threshold resulting from the CMORPH estimates is lower than that calculated with rain gauge hourly measurements (OBS-H). The threshold equations at 5% NEP are listed in Table 1.

Rainfall duration D (h) versus cumulated event rainfall E (mm) conditions that have resulted in landslides for the OBS-H (green) and CMORPH (violet) data sets and the corresponding ED thresholds at 5% NEPs with associated uncertainty (shaded areas)
Figure 3 shows the thresholds at 5% NEP for the OBS-D and SM2RASC data sets, which have both a temporal resolution of one day. As for the case of hourly data sets, the threshold defined using SB rainfall estimates (T5,SM2RASC) is lower and steeper than the curve calculated with rain gauge measurements (T5,OBS-D).

Rainfall duration D (d) versus cumulated event rainfall E (mm) conditions that have resulted in landslides for the OBS-D (gray) and SM2RASC (red) data sets and the corresponding ED thresholds at 5% NEPs with associated uncertainty (shaded areas)
Validation of Thresholds
The validation procedure calculates the TPR and FPR skill scores (Eqs. 2 and 3) for each data set at the previously selected NEP values from 0.05 to 50%. The ROC curves for the four data sets are shown in Fig. 4. The OBS-H ROC curve exhibits the shortest minimum distance δ = 0.22 from PCP, i.e. this data set performs the best (see the inset table in Fig. 4). The OBS-D rainfall product performs better than CMORPH and SM2RASC, the last being the worst in terms of distance from PCP. The NEP values of the thresholds that minimize δ for each data set vary from 15 to 35%.

ROC curves for OBS-H (green), CMORPH (magenta), OBS-D (gray), and SM2RASC (red) data sets. Horizontal and vertical bars represent variation ranges of TPR and FPR for the 100 runs in which the rainfall conditions are randomly selected. The minimum distance δ between PCP and the nearest NEP value for each curve are shown in the inset
Discussion and Conclusions
The aim of this study is assessing the reliability of rainfall thresholds obtained using different rainfall data types, as a function of their detection method (GB or SB) and their temporal resolution (hourly or daily).
Firstly, note that rainfall thresholds in Figs. 2 and 3 are calculated with hourly and daily temporal resolution, respectively, and cannot be directly compared being defined using different units of time. Nevertheless, it is worthwhile to compare the cumulated rainfall (E) at D = 24 h obtained from the four thresholds. The threshold value for E is 28.5 mm using T5,OBS-H, whereas is only 16.1 mm at D = 1 d for T5,OBS-D. The lower value obtained for the OBS-D data set is likely due to the lower accuracy of a coarser (daily) temporal resolution (also observed by Gariano et al. 2020). Conversely, for CMORPH and SM2RASC the mean cumulated rainfall at 24 h is E = 5.9 mm and 7.5 mm, respectively. the one between the two satellite products that provides a higher daily rainfall estimate is SM2RASC, despite the lower temporal resolution.
Figure 4 shows that thresholds defined with GB rainfall data (OBS-H and OBS-D) allow to better discriminate between events that have or have not triggered landslides. Indeed, for a hit rate TPR = 0.8 (80%), the number of expected false positive rate is 12% for OBS-H and 26% for OBS-D. The performance of CMORPH and SM2RASC at the same hit rate is even worse giving a probability of false alarms of 40% and 52%, respectively. For each data set, the minimum distance δ between PCP and the ROC curve identifies the NEP value (inset in Fig. 4), which optimizes the prediction performance.
Overall, the use of daily data has the global effect of degrading the reliability of the thresholds, both for GB and SB rainfall data.
The lower performance of SB with respect to GB rainfall products is easily ascribed to the high-quality of OBS-H and OBS-D data sets in AMU, which is based on ~150 rain gauges.
The use of SB rainfall products at different time resolutions shows that CMORPH performs better than SM2RASC at every NEPs. Generally, SB daily rainfall products (as SM2RASC) could be used being aware that high TPR values likely lead to have high FPR values, and therefore unwanted false alarms.
References
Brocca L, Ciabatta L, Massari C, Moramarco T, Hahn S, Hasenauer S, Kidd R, Dorigo W, Wagner W, Levizzani V (2014) Soil as a natural rain gauge: estimating global rainfall from satellite soil moisture data. J Geophys Res 119(9):5128–5141. https://doi.org/10.1002/2014JD021489
Brunetti MT, Peruccacci S, Rossi M, Luciani S, Valigi D, Guzzetti F (2010) Rainfall thresholds for the possible occurrence of landslides in Italy. Nat Hazards Earth Syst Sci 10:447–458. https://doi.org/10.5194/nhess-10-447-2010
Brunetti MT, Melillo M, Peruccacci S, Ciabatta L, Brocca L (2018) How far are we from the use of satellite rainfall products in landslide forecasting? Remote Sens Environ 210:65–75. https://doi.org/10.1016/j.rse.2018.03.016
Fawcett T (2006) An introduction to ROC analysis. Pattern Recogn Lett 27:861–874. https://doi.org/10.1016/j.patrec.2005.10.010
Gariano SL, Brunetti MT, Iovine G, Melillo M, Peruccacci S, Terranova O, Vennari C, Guzzetti F (2015) Calibration and validation of rainfall thresholds for shallow landslide forecasting in Sicily, southern Italy. Geomorphology 228:653–665. https://doi.org/10.1016/j.geomorph.2014.10.019
Gariano SL, Melillo M, Peruccacci S, Brunetti MT (2020) How much does the rainfall temporal resolution affect rainfall thresholds for landslide triggering? Nat Hazards 100:655–670. https://doi.org/10.1007/s11069-019-03830-x
Guzzetti F, Gariano SL, Peruccacci S, Brunetti MT, Marchesini I, Rossi M, Melillo M (2020) Geographical landslide early warning systems. Earth-Sci Rev 200:102973. https://doi.org/10.1016/j.earscirev.2019.10297
Guzzetti F, Peruccacci S, Rossi M, Stark CP (2008) The rainfall intensity–duration control of shallow landslides and debris flows: an update. Landslides 5(1):3–17. https://doi.org/10.1007/s10346-007-0112-1
Hegerl G, Zwiers F, Stott P, Kharin V (2004) Detectability of anthropogenic changes in annual temperature and precipitation extremes. J Clim 17:3683–3700. https://doi.org/10.1175/1520-0442(2004)017%3C3683:DOACIA%3E2.0.CO;2
Joyce RJ, Janowiak JE, Arkin PA, Xie P (2004) CMORPH: a method that produces global precipitation estimates from passive microwave and infrared data at high spatial and temporal resolution. J Hydrometeorol 5:487–503. https://doi.org/10.1175/1525-7541(2004)005%3C0487:CAMTPG%3E2.0.CO;2
Melillo M, Brunetti MT, Peruccacci S, Gariano SL, A Roccati, Guzzetti F (2018) A tool for the automatic calculation of rainfall thresholds for landslide occurrence. Environ Model Softw 105:230–243. https://doi.org/10.1016/j.envsoft.2018.03.024
Peruccacci S, Brunetti MT, Gariano SL, Melillo M, Rossi M, Guzzetti F (2017) Rainfall thresholds for possible landslide occurrence in Italy. Geomorphology 290:39–57. https://doi.org/10.1016/j.geomorph.2017.03.031
Peruccacci S, Brunetti MT, Luciani S, Vennari C, Guzzetti F (2012) Lithological and seasonal control on rainfall thresholds for the possible initiation of landslides in central Italy. Geomorphology 139:79–90. https://doi.org/10.1016/j.geomorph.2011.10.005
Petley D (2019) July 2019: a record-breaking landslide month for fatal landslides. https://blogs.agu.org/landslideblog/2019/08/06/july-2019-fatal-landslides/. Accessed 13 Dec 2019
Piciullo L, Calvello M, Cepeda JM (2018) Territorial early warning systems for rainfall-induced landslides. Earth-Sci Rev 179:228–247. https://doi.org/10.1016/j.earscirev.2018.02.013
Rossi M, Luciani S, Valigi D, Kirschbaum D, Brunetti MT, Peruccacci S, Guzzetti F (2017) Statistical approaches for the definition of landslide rainfall thresholds and their uncertainty using rain gauge and satellite data. Geomorphology 285:16–27. https://doi.org/10.1016/j.geomorph.2017.02.001
Segoni S, Piciullo L, Gariano SL (2018) A review of the recent literature on rainfall thresholds for landslide occurrence. Landslides 15:1483–1501. https://doi.org/10.1007/s10346-018-0966-4
Seneviratne SI, Nicholls N, Easterling D, Goodess CM, Kanae S, Kossin J, Luo Y, Marengo J, McInnes K, Rahimi M, Reichstein M, Sorteberg A, Vera C, Zhang X (2012) Changes in climate extremes and their impacts on the natural physical environment. In: Field CB, Barros V, Stocker TF, Qin D, Dokken DJ, Ebi KL, Mastrandrea MD, Mach KJ, Plattner G-K, Allen SK, Tignor M, Midgley PM (eds) Managing the risks of extreme events and disasters to advance climate change adaptation. A special report of working groups I and II of the Intergovernmental Panel on Climate Change (IPCC). Cambridge University Press, Cambridge, UK, and New York, NY, USA. pp 109–230
Trenberth KE, Dai A, Rasmussen RM, Parsons DB (2003) The changing character of precipitation. Bull Am Meteorol Soc 84:1205–1217. https://doi.org/10.1175/BAMS-84-9-1205
Wagner W, Hahn S, Kidd R, Melzer T, Bartalis Z, Hasenauer S, Figa J, de Rosnay P, Jann A, Schneider S, Komma J, Kubu G, Brugger K, Aubrecht C, Zuger J, Gangkofner U, Kienberger S, Brocca L, Wang Y, Bloeschl G, Eitzinger J, Steinnocher K, Zeil P, Rubel F (2013) The ASCAT soil moisture product: a review of its specifications, validation results, and emerging applications. Meteorol Z 22(1):5–33. https://doi.org/10.1127/0941-2948/2013/0399
Watterson IG, Dix MR (2003) Simulated changes due to global warming in daily precipitation means and extremes and their interpretation using the gamma distribution. J Geophys Res 108:4379. https://doi.org/10.1029/2002JD002928
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2021 Springer Nature Switzerland AG
About this chapter

Cite this chapter
Brunetti, M.T., Melillo, M., Gariano, S.L., Ciabatta, L., Brocca, L., Peruccacci, S. (2021). Regional Approaches in Forecasting Rainfall-Induced Landslides . In: Casagli, N., Tofani, V., Sassa, K., Bobrowsky, P.T., Takara, K. (eds) Understanding and Reducing Landslide Disaster Risk. WLF 2020. ICL Contribution to Landslide Disaster Risk Reduction. Springer, Cham. https://doi.org/10.1007/978-3-030-60311-3_29
Download citation
DOI: https://doi.org/10.1007/978-3-030-60311-3_29
Published:
Publisher Name: Springer, Cham
Print ISBN: 978-3-030-60310-6
Online ISBN: 978-3-030-60311-3
eBook Packages: Earth and Environmental ScienceEarth and Environmental Science (R0)