
Abstract
We can compactly represent large sets of solutions for problems with discrete decision variables by using decision diagrams. With them, we can efficiently identify optimal solutions for different objective functions. In fact, a decision diagram naturally arises from the branch-and-bound tree that we could use to enumerate these solutions if we merge nodes from which the same solutions are obtained on the remaining variables. However, we would like to avoid the repetitive work of finding the same solutions from branching on different nodes at the same level of that tree. Instead, we would like to explore just one of these equivalent nodes and then infer that the same solutions would have been found if we explored other nodes. In this work, we show how to identify such equivalences—and thus directly construct a reduced decision diagram—in integer programs where the left-hand sides of all constraints consist of additively separable functions. First, we extend an existing result regarding problems with a single linear constraint and integer coefficients. Second, we show necessary conditions with which we can isolate a single explored node as the only candidate to be equivalent to each unexplored node in problems with multiple constraints. Third, we present a sufficient condition that confirms if such a pair of nodes is indeed equivalent, and we demonstrate how to induce that condition through preprocessing. Finally, we report computational results on integer linear programming problems from the MIPLIB benchmark. Our approach often constructs smaller decision diagrams faster and with less branching.
Access provided by Autonomous University of Puebla. Download conference paper PDF
Similar content being viewed by others

Keywords
1 Introduction
The enumeration of near-optimal solutions is a feature that is present in commercial MILP solvers such as CPLEX [33] and Gurobi [26] as well as algebraic modelling environments such as GAMS [25]. This feature is important because some users need to qualitatively compare the solutions of a mathematical model. However, those solutions are often a small set collected along the way towards solving for the optimal solution. While the option for complete enumeration exists in some solvers, it comes with observations like the following in CPLEX [33]:
Beware, however, that, even for small models, the number of possible solutions is likely to be huge. Consequently, enumerating all of them will take time and consume a large quantity of memory.
In fact, the problem of enumerating integer solutions is #P-complete [49, 50].
In practice, the enumeration of solutions has been an extension of the same methods used for optimization. When searching for an optimal solution of a problem with linear constraints and integer variables, the first step is often to solve a relaxation of this problem: a linear program in which we ignore that the variables should have integer values [18]. If the resulting solution has fractional values for some of the variables, then we may resort to branching: exploring two or more subproblems in which we fix or restrict the domain of these variables to exclude their corresponding fractional values. We can ignore some of the resulting subproblems if they are provably suboptimal, for which reason this process is known as branch-and-bound [36]. However, if we are interested in enumerating some or all the solutions, then we may need to keep branching even if no value is fractional. In such a case, we continue while the domains of the variables have multiple values, the relaxation remains feasible, and the objective function value is within a desired optimality gap. That is the case of the one-tree approach [19], which has been used to populate the solution pool of the CPLEX solver [32].
The branch-and-bound process is often represented by a directed tree, the branch-and-bound tree, in which a root node r corresponds to the problem of interest and the children of each node are the subproblems defined by branching. If we branch by assigning the value of one decision variable at a time to each possible value, then a path from the root to a leaf defining a feasible subproblem corresponds to a set of assignments leading to a unique solution. Such explicit representation of the solution set emerging from branch-and-bound, which may reach an exponential number of nodes with respect to the number of variables, could be naturally transformed into a decision diagram by merging the leaves of the tree as a single terminal node t [44]. Likewise, we can merge any other nodes from which the same solutions are obtained on the remaining variables while preserving a correspondence between solutions of the problem and r–t paths in the diagram. That results in a representation that is substantially more compact and, in some cases, can have less nodes than the number of solutions represented. If every path assigns a value to every variable, then we can find optimal solutions for varied linear objective functions by assigning the corresponding weights to the arcs and computing a minimum weight r–t path, which is usually faster than resolving the problem with different objective functions [44].

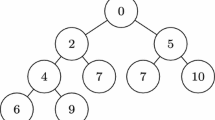
(a) Tree representing the solutions of \(\{ x \in \{0, 1\}^3 : 2 x_1 - 2 x_2 - 3 x_3 \le -1 \}\). (b) Decision diagram from merging the leaf nodes. (c) Reduced decision diagram with interval of equivalent right-hand side values for the inequality on each node.
Figure 1 illustrates these different graphic representations for the solutions of inequality \(2 x_1 - 2 x_2 - 3 x_3 \le -1\) on a vector of binary variables \(x \in \{0,1\}^3\): (a) is a tree in which every path from the root to a different leaf assigns a distinct set of values to the variables; (b) is the decision diagram produced by merging the leaves of the tree; and (c) is a decision diagram in which we merge the three nodes in (b) from which the only arc towards t corresponds to \(x_3=1\). We use thin arcs for assignments of value 0 and bold arcs for assignments of value 1. In the example, we always assign a value to variable \(x_1\) first, then to variable \(x_2\), and finally to variable \(x_3\). When the same order of variables is used in every r–t path, then nodes at the same arc-distance from r define a layer with the same selector variable for the next assignment, and we say that we have an ordered decision diagram. In fact, Fig. 1(c) has the smallest ordered decision diagram for that sequence of variable selectors, and we call it a reduced decision diagram.
In this paper, we discuss how to compare the formulation of subproblems involving one or more inequalities to determine the equivalence of branch-and-bound nodes, and hence directly construct reduced decision diagrams.
1.1 Contribution
We generalize prior work on identifying equivalent subproblems with a single inequality [1, 2, 6] and introduce a variant for the case of multiple inequalities. First, we show how to compute the interval of equivalent Right-Hand Side (RHS) values for any inequality on finite domains with additively separable Left-Hand Side (LHS) and fractional RHS. Second, we discuss why the same idea cannot be directly applied to problems with multiple inequalities. In that case, we show how to eliminate candidates for equivalence among the explored nodes in such a way that we are left with at most one potentially equivalent node. Finally, we present a sufficient condition achievable by bottom-up preprocessing to determine if such a remaining node is indeed equivalent.
2 Decision Diagrams
A decision diagram is a directed acyclic graph with root node r. Arcs leaving each node denote assignments to a variable, which we denote its selector variable. If the variables can only take two possible values, the diagram is binary. If the variables can take more values, the diagram is multi-valued. When representing only feasible solutions, there is one terminal node t and each solution is mapped to an r–t path. Otherwise, there are two terminal nodes \(\mathcal {T}\) and \(\mathcal {F}\), with feasible solutions corresponding to r–\(\mathcal {T}\) paths and infeasible solutions to r–\(\mathcal {F}\) paths. We say that nodes at the same distance (in arcs) from the root node r are in the same layer of the diagram. The sets of paths from a given node u toward t (or \(\mathcal {T}\)) define the solution set of that node. Nodes have the same state if those sets coincide. A diagram is reduced if no two nodes have the same state. A diagram is ordered if all nodes in each layer have the same selector variable.
Bryant [14] has shown that we can efficiently reduce a decision diagram through a single bottom-up pass by identifying and merging nodes with equivalent sets of assignments on the remaining variables.
Two factors may help us obtain smaller decision diagrams. First, equivalences are intuitively more frequent in ordered decision diagrams. In such a case, all nodes in each layer have solution sets defined on the same set of variables, which is a necessary condition to merge such nodes. Second, it is easier to identify equivalences if the problem is defined by inequalities in which the Left-Hand Side (LHS) is an additively separable function. A function f(x) on an n-dimensional vector of variables x is additively separable if we can decompose it as \(f(x) = \sum _{i=1}^n f_i(x_i)\), i.e., a sum of univariate functions on each of those variables. In such a case, all the nodes in a given layer define subproblems with inequalities having the same LHS. For example, if we have a problem \(\{x : \sum _{i=1}^n f_i(x_i) \le \rho \}\), then each node obtained by assigning a distinct value \(\bar{x}_1\) to variable \(x_1\) defines a subproblem \(\{x: \sum _{i=2}^n f_i(x_i) \le \rho - f_1(\bar{x}_1) \}\) on the same \(n-1\) variables and with the same LHS for the inequality.
Following those conditions, we can anticipate that two nodes have the same solutions if their subproblems have inequalities with the same Right-Hand Side (RHS) values. In such a case, we can save time if we just branch on one of those nodes to enumerate its solutions and then merge it with the second node. For example, in the problem of Fig. 1 we obtain the same subproblem \(\{x_3 \in \{0,1\} : -3 x_3 \le -1 \}\) with assignments \(x_1=0\) and \(x_2=0\) or \(x_1=1\) and \(x_2=1\).
More generally, we say that two subproblems have equivalent formulations if they have the same solutions, even if the formulations are different. For example, in Fig. 1 we obtain subproblem \(\{ x_3 \in \{0,1\} : -3 x_3 \le -3 \}\) by assigning \(x_1=1\) and \(x_2=0\), which has the same solution set as the previously mentioned assignments leading to \(\{x_3 \in \{0,1\} : -3 x_3 \le -1 \}\). A method to compute such equivalent RHS values for nodes in the same layer of ordered decision diagrams representing a linear inequality with integer coefficients has been independently proposed twice on binary domains [1, 6] and later extended to multi-valued domains [2]. This method is based on search for all the solutions for some nodes and then inferring if a new node would have the same solutions as one of those nodes. We will use the following definition for those previous nodes.
Definition 1 (Explored node)
A node is said to be explored if all the solutions for the subproblem rooted at that node are known.
Once a node has been explored, we can compute the minimum RHS value that would produce the same solutions and the minimum RHS value, if any, that would produce more solutions. In Fig. 1(c), the interval of equivalent integer values for the RHS of the inequalities on the remaining variables is shown next to each node. For example, in the penultimate layer we have the intervals of RHS values for \(-3x_3\) as LHS, which includes \([-3,-1]\) for the node that is reached by the three assignments to \(x_1\) and \(x_2\) that we discussed previously.
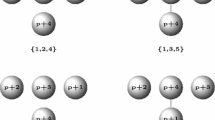
However, we cannot directly apply the same method to problems with multiple inequalities and expect to find all the nodes that are equivalent. For example, in Fig. 2 we have three equivalent formulations for the solution set \(\{ (0,0), (0,1), (1,0) \}\). The inequality with LHS \(5 x_1 + 4 x_2\) has equivalent RHS values in [5, 8]. The inequality with LHS \(6 x_1 + 10 x_2\) has equivalent RHS values in [10, 15]. But there are equivalent RHS values beyond \([5,8] \times [10,15]\): if the RHS of only one inequality is made larger, such as in the first two examples of Fig. 2, the other inequality prevents the inclusion of solution (1, 1). In other words, not every inequality needs to separate every infeasible solution.

Equivalent formulations in which the inequalities have the same functions in the Left-Hand Side (LHS) but different values in the Right-Hand Side (RHS).
3 Related Work
Put in context, our work may also improve exhaustive search. Even in cases where the goal is not to construct a decision diagram for the set of solutions, the characterization of a state for the nodes of the corresponding decision diagram based on their solution sets can be exploited to avoid redundant work during the branch-and-bound process.
Beyond the case in which all RHS values are the same, prior work on identifying equivalent branch-and-bound nodes has focused on detecting inequalities that are always satisfied. One example is the detection of unrestricted subtrees, in which any assignment to the remaining variables is feasible [3]. The same principle was later used to ignore all unrestricted inequalities and only compare the RHS values of inequalities that separate at least one solution [44]. That can be particularly helpful with set covering constraints, in which it suffices to have one variable assigned to 1. This line of work relies on computing the minimum RHS value after which each inequality does not separate any solution, and therefore any RHS value larger than that is deemed equivalent. For example, in Fig. 1(c) the first node in the penultimate layer allows both possible values to \(x_3\), which for the LHS \(-3x_3\) implies a RHS of 0 or more. In constrast to [44], the present paper aims to identify all nodes that can be merged during the top-down construction of a decision diagram corresponding to an ILP formulation. Hence, we also compare different RHS values that exclude at least one solution.
While the search effort may decrease, it can still be substantial and depend on other factors. First, the size of a reduced decision diagram for a single constraint can be exponential on the number of variables for any order of variable selectors [30]. Second, finding a better order of variable selectors for binary decision diagrams is NP-complete [13], hence implying that it is NP-hard to find an order of variable selections that minimizes the size of the decision diagram [6, 22]. Nevertheless, some ordering heuristics have been found to work well in practice [6, 7], while strong bounds for the size of the decision diagrams according to the ordering of variable selectors have been shown for certain classes of problems [28]. In other cases, a convenient order may be deduced from the context of the problem. For example, by identifying a temporal relationship among the decision variables, such as in sequencing and scheduling problems [17, 42].
A related approach consists of analyzing dominance relations among branch-and-bound nodes [31, 35]. When exploring a node u, we may wonder if there is another node v that can be reached by fixing the same variables with different values such that (i) the assignments leading to v are preferable according to the objective function; and (ii) v defines a relaxation of the subproblem defined by u, in which case all solutions that can be found by exploring u can also be found by exploring v [16, 23, 24]. If such a node v exists and we only want to find an optimal solution, then we can safely prune the subtree rooted at u and only explore the subtree rooted at v. However, such an approach is not fully compatible with enumerating solutions because the subproblems on u and v may not have the same set of solutions. Furthermore, a change in the objective function could make the discarded node u preferable to node v in applications of reoptimization. Finally, finding such a node v may entail solving an optimization problem on the variables that are fixed to reach node u, and thus it only pays off closer to the root node because not many variables have been assigned yet.
In contrast, our approach pays off closer to the bottom of the decision diagram representation. For a node at distance k from r, there are at most \(2^k\) states if all variables have binary domains, which are the distinct assignments to the first k variables. For a node at distance k from t, there are at most \(2^{2^k} - 1\) states, which are the non-empty sets of solutions for the last k variables. Hence, we should generally expect that equivalences occur more often when the number of top-down states exceeds the number of bottom-up states.
In the context of integer linear programming, a small set of solutions is often obtained through the application of inequalities separating previous solutions [5, 15]. Recent work has also focused on the generation of a diverse set of solutions [20, 41, 48], and there are also methods to obtain exact upper bounds [34] and probabilistic lower bounds [46] on the size of the solution set.
Decision diagrams and some extensions have also been widely used to solve combinatorial optimization problems [4, 8, 9, 29, 38, 40, 43, 47, 51,52,53], and more recently stochastic [27, 37, 45] and nonlinear optimization problems [10, 21].
4 Prior Result
We begin our analysis with a prior result about the direct construction of reduced decision diagrams, which concerns the decision diagram rooted at a node v and defined by an inequality of the form \(a_1 x_1 + \ldots + a_n x_n \le a_0\) with integer coefficients and each decision variable \(x_i\) having a discrete domain of the form \(\{0, 1, \ldots , d_i\}\). For such a node v and each of the other nodes in the decision diagram, we want to compute a corresponding interval \([\beta , \gamma ]\) or \([\beta , \infty )\), where \(\beta \) is the smallest integer RHS value that could replace \(a_0\) and still yield the same solutions. Similarly, \(\gamma \) is the largest integer RHS value that would still yield the same solutions, and \(\gamma \) only exists if at least one solution is infeasible. We recursively compute such intervals after exploring a node and all of its descendants.
Theorem 1
(Abío & StuckeyFootnote 1 [2]). Let \(\mathcal {M}\) be the multi-valued decision diagram of a linear integer constraint \(a_1 x_1 + \ldots + a_n x_n \le a_0\). Then, the following holds:
-
The interval of the true node \(\mathcal {T}\) is \([0, \infty )\).
-
The interval of the false node \(\mathcal {F}\) is \((- \infty , -1]\).
-
Let v be a node with selector variable \(x_i\) and children \(\{ v_0, v_1, \ldots , v_{d_i} \}\). Let \([\beta _j, \gamma _j]\) be the interval of \(v_j\). Then, the interval of v is \([\beta , \gamma ]\), with \(~ \beta = \max \big \{ \beta _s + s a_i ~ | ~ s \in \{ 0, \ldots , d_i \} \big \}, ~ \gamma = \min \big \{ \gamma _s + s a_i ~ | ~ s \in \{ 0, \ldots , d_i \} \big \}\).
The interval of the explored nodes can then be compared with the RHS of the inequalities defining each of the unexplored nodes in the same layer to identify equivalences. In order to fully avoid redundant work, the branch-and-bound algorithm should perform a depth-first search (DFS), where the unexplored node with fewer unfixed variables is explored next. In such a case, we do not risk branching on two nodes that would later be found to have the same state.
In this paper, we consider decision diagrams with a single terminal node t, hence disregarding infeasible solutions and nodes in which roughly \(\beta = -\infty \).
5 The Case of One Inequality
In this section, we discuss how Theorem 1 can be further generalized when applied to a single inequality. Our contribution is evidencing that the sequence of work culminating in the result by Abío and Stuckey [2] can be extended to account for the case of linear inequalities with fractional coefficients, and to the slightly more general case of inequalities involving additively separable functions.
We begin with an intuitive argument for generalizing that result for the case of fractional RHS values. In the interval \([\beta , \gamma ]\) used in Theorem 1, both \(\beta \) and \(\gamma \) are integer values corresponding to the smallest and largest integer RHS values defining the same solutions for the inequality. If the LHS coefficients and the decision variables are integer, then it follows that any right-hand side value larger than \(\gamma \) but smaller than \(\gamma +1\) would also define the same solutions. Hence, \([\beta , \gamma +1)\) is the maximal interval of equivalent right-hand side values if we allow a fractional right-hand side. Now the upper end value \(\gamma +1\) is the smallest RHS value yielding a proper superset of solutions. Furthermore, with such half-closed intervals, both ends may also become fractional if the LHS coefficients are fractional and assigning a variable changes the RHS by a fractional amount.
In addition, the only reason to represent infeasible solutions is to compute those upper ends of the RHS intervals. But for each node that has missing arcs for some values of its selector variable, which if represented would only reach the terminal \(\mathcal {F}\), the corresponding upper end is the sum of the impact of that assignment with the smallest RHS associated with a solution on the remaining variables. But as we will see next, that value can be calculated by inspection.
In summary, we can ignore infeasible solutions by using a single terminal node t, lift the integrality of all coefficients, and consequently allow the LHS to be additively separable. That leads us to the following result:
Theorem 2
Let \(\mathcal {D}\) be a decision diagram with variable ordering \(x_1, x_2, \ldots , x_n\) of \(f(x) = f_1(x_1) + \ldots + f_n(x_n) \le \rho \) on finite domains \(D_1\) to \(D_n\). Then, the following holds:
-
The interval of the terminal node t is \([0, \infty )\).
-
Let v be a node with selector variable \(x_i\) and non-empty multi-setFootnote 2 of descendants \(\{ v_j ~ | ~ j \in D^v \}\), \(D^v \subseteq D_i\), where \(v_j\) is reached by an arc denoting \(x_i = j\). Let \([\beta _j, \gamma _j)\) be the interval of \(v_j\). The interval of v is \([\beta , \gamma )\), with
$$ \beta = \max \{ \beta _j + f_i(j) ~ | ~ j \in D^v \} $$and
$$\begin{aligned} \gamma = \min \Big \{ \min \{ \gamma _j + f_i(j) ~ | ~ j \in D^v \}, ~ \min \{ \xi _i + f_i(j) ~ | ~ j \in D_i \setminus D^v \} \Big \}, \end{aligned}$$where
$$\xi _i = \sum _{l=i+1}^n \min \{ f_l(d) ~ | ~ d \in D_l \}. $$
Since we can prove a stronger result regarding the lower end \(\beta \), which also applies to the case of multiple inequalities that will be discussed in Sect. 6, we split the proof of Theorem 2 into two lemmas.
Lemma 1
Let \(\mathcal {D}\) be a decision diagram with variable ordering \(x_1, x_2, \ldots , x_n\) of \(\{ (x_1, x_2, \ldots , x_n) \in D_1 \times D_2 \times \ldots D_n | f^k(x) = f^k_1(x_1) + \ldots + f^k_n(x_n) \le \rho ^k ~ \forall k = 1, \ldots , m \}\). Then, computing \(\beta ^k\) for each inequality \(f^k(x) \le \rho ^k\) as in Theorem 2 yields the smallest RHS not affecting the set of solutions satisfying all inequalities on each node.
Proof
We proceed by induction on the layers, starting from the bottom. The base case holds since \(0 \le \rho ^k\) is only valid if \(\rho ^k \ge \beta ^k = 0\) for each inequality k at the terminal node t. Now suppose, for contradiction, that Lemma 1 holds for the \(n-i\) bottom layers of \(\mathcal {D}\) and not for the one above. Hence, there would be a node v with selector variable \(x_i\) such that v has the same solutions if we replace the RHS of the k-th inequality with some \(\delta < \beta ^k \le \rho ^k\), thereby obtaining \(\sum _{l=i}^n f^k_l(x_l) \le \delta \). Let \(j \in \arg \max \{ \beta ^k_j + f^k_i(j) ~ | ~ j \in D^v \}\), i.e., \(v_j\) would be one of the children maximizing the expression with which we calculate \(\beta ^k\) in the statement of Lemma 1 and \(\beta ^k_j\) is the smallest RHS value not affecting the set of solutions of \(v_j\) with respect to the k-th inequality. Consequently, node \(v_j\) would have the same solutions if the k-th inequality for \(v_j\) becomes \(\sum _{l=i+1}^n f^k_l(x_l) \le \delta - f_i(j)\). However, \(\beta ^k_j = \beta ^k - f^k_i(j) > \delta - f^k_i(j)\), and we have a contradiction since by induction hypothesis any value smaller than \(\beta ^k_j\) would yield proper subset of the solution set of \(v_j\). \(\Box \)
Lemma 2
Computing \(\gamma \) for one inequality as in Theorem 2 yields the smallest RHS value that would yield a proper superset of the solutions of node v.
Proof
We proceed by induction on the layers, starting from the bottom. The base case holds since the terminal node t has a set with one empty solution and we denote \(\gamma = +\infty \).
By induction hypothesis, we assume that Lemma 2 holds for the \(n-i\) lower layers of \(\mathcal {D}\), and we show next that it consequently holds for the i-th layer of \(\mathcal {D}\).
For any node v in the i-th layer with interval \([\beta , \gamma )\) for a finite \(\gamma \) such that \(\sum _{l=i}^n f_l(x_l) \le \gamma \), let \(j \in \arg \min \Big \{ \min \{ \gamma _j + f_i(j) ~ | ~ j \in D^v \}, \min \{ \xi _i + f_i(j) ~ | ~ j \in D_i \setminus D^v \} \Big \}\). If (I) \(j \in \arg \min \{ \gamma _j + f_i(j) ~ | ~ j \in D^v \}\), then there is a child node \(v_j\) that minimizes the expression with which we calculate \(\gamma \) in the statement of Lemma 2. By induction hypothesis, that implies that there is a solution that is not feasible for node \(v_j\) and such that \(\sum _{l=i+1}^n f_l(\bar{x}_j) = \gamma _j\). Consequently, solution \((\bar{x}_{i}=j, \bar{x}_{i+1}, \ldots , \bar{x}_n)\) is not feasible for node v and \(\sum _{l=i}^n f_l(\bar{x}_j) = \gamma \). If (II) \(j \in \arg \min \{ \xi _i + f_i(j) ~ | ~ j \in D_i \setminus D^v \}\), then \(\gamma = f_i(j) + \xi _i\) and node v does not have any solution in which \(x_i = j\). Consequently, there is an infeasible solution \((\bar{x}_{i}=j, \bar{x}_{i+1}, \ldots , \bar{x}_n)\) such that \(\sum _{l=i+1}^n f_l(\bar{x}_j) = \xi _i\) and \(\sum _{l=i+1}^n f_l(\bar{x}_j) = \gamma \). In either case, a RHS of \(\gamma \) yields a proper superset of the solutions of v. Furthermore, a smaller RHS value yielding a proper superset of the solutions of v would either contradict the choice of j in (I) if there is at least one solution of v such that \(x_i=j\) or in (II) if there is no solution of v such that \(x_i=j\). \(\Box \)
We are now able to prove the main result of this section.
Proof
(Theorem 2). Lemma 1 implies that \(\beta \) is the smallest RHS value yielding the same solution set as v and Lemma 2 implies that \(\gamma \) is the smallest RHS value yielding at least one more solution than node v. Since there is a single inequality, then a RHS of \(\gamma \) yields a proper superset of the solutions of v. \(\Box \)
6 The Case of Multiple Inequalities
For variables \(x_1\) to \(x_n\) with finite domains \(D_1\) to \(D_n\), we now consider constructing a decision diagram for a problem defined by m inequalities in the following form:
We will exploit the fact that we still can apply Lemma 1 to a problem with multiple inequalities. Theorem 2 is not as helpful because the equivalent upper ends for one inequality may depend on the RHS values of other inequalities. That prevents us from immediately identifying if two nodes are equivalent by comparing the intervals of the explored node with the RHS values of the unexplored node. Nevertheless, we can characterize and distinguish nodes having different solution sets by their lower ends as in Lemma 1. We show that such comparison is enough to exclude all but one of the explored nodes as potentially equivalent, to which we describe a sufficient condition to guarantee equivalence.
6.1 Necessary Conditions
With multiple inequalities, we cannot simply use the intervals of RHS values associated with each of the inequalities independently. We have previously observed that with the example in Fig. 2, which we now revisit with half-closed intervals. For the inequality with LHS \(5 x_1 + 4 x_2\), the solution set \(\{(0,0),(0,1),(1,0)\}\) corresponds to RHS values in [5,9). For the inequality with LHS \(6 x_1 + 10 x_2\), that same solution set corresponds to RHS values in [10,16). Hence, \([5,9) \times [10,16)\) defines a valid combination of RHS values yielding the same solutions. However, we can relax one inequality if the other still separates the remaining infeasible solution (1, 1). Consequently, the solution set is actually characterized by following combination of RHS values: \([5,9) \times [10, +\infty ) \cup [5,+\infty ) \times [10,16)\).
Note that the lower ends in \(\beta \) are nevertheless the same. In fact, Lemma 1 implies that we can characterize node states by the smallest RHS value of each inequality that would yield the same solutions. The key difference is that pushing any RHS lower than \(\beta \) restricts the solution set, whereas increasing some RHS to \(\gamma \) or above may not enlarge the solution set if another inequality separates the solutions that would otherwise be included. Hence, we ignore the upper ends in what follows and focus on the consequences of Lemma 1.
In what follows, let v be an unexplored node with RHS values \(\rho ^1\) to \(\rho ^m\) and let \(\bar{v}\) and \(\bar{\bar{v}}\) be explored nodes with lower ends \(\bar{\beta }^1\) to \(\bar{\beta }^m\) and \(\bar{\bar{\beta }}^1\) to \(\bar{\bar{\beta }}^m\), respectively.
Corollary 1
(Main necessary condition). Node v is equivalent to node \(\bar{v}\) only if \(\rho ^k \ge \bar{\beta ^k}\) for \(k=1, \ldots , m\).
Proof
Lemma 1 implies that \(\rho ^k < \bar{\beta }^k\) for any inequality k would make a solution of \(\bar{v}\) infeasible for v. Conversely, if \(\rho ^k \ge \bar{\beta }^k\) for \(k=1, \ldots , m\), then v has at least the same solutions as \(\bar{v}\), a necessary condition for equivalence. \(\Box \)
Corollary 2
(Dominance elimination). Node v is equivalent to an explored node \(\bar{v}\) only if no other explored node \(\bar{\bar{v}}\) for which v satisfies the necessary condition has a strictly larger lower end for any of the inequalities, i.e., there is no such \(\bar{\bar{v}}\) for which \(\bar{\bar{\beta ^k}} > \bar{\beta ^k}\) for any \(k=1, \ldots , m\).
Proof
If two nodes \(\bar{v}\) and \(\bar{\bar{v}}\) have different lower ends for inequality k and they are such that \(\bar{\bar{\beta }}^k > \bar{\beta }^k\), then \(\bar{\bar{v}}\) has a solution requiring a larger RHS value on inequality k to be feasible. Thus, \(\bar{v}\) does not have such a solution. However, if both \(\bar{v}\) and \(\bar{\bar{v}}\) have a subset of the solutions of node v, then v also has that solution and thus cannot be equivalent to \(\bar{v}\). \(\Box \)
Corollary 3
(One or none). Node v has at most one explored node satisfying both the necessary condition and the dominance elimination in a reduced decision diagram.
Proof
Since the lower ends characterize the state of a node and no two nodes have the same state in a reduced decision diagram, then any pair of explored nodes will differ in at least one lower end value. Consequently, no more than one explored node can satisfy both conditions for node v. \(\Box \)
When multiple nodes meet the necessary condition of having at least as many solutions as node v, we can eliminate some by dominance. If they differ in the lower end of some inequality, that implies that node v and one of them have a solution that the other does not have, hence allowing us to discard the latter. In fact, explored nodes can eliminate one another in different inequalities. Since no two nodes have all lower ends matching in a reduced decision diagram, no more than one node is left as candidate, but possibly none is.
6.2 A Sufficient Condition
From Corollary 3, we are left with at most one explored node \(\bar{v}\) that could be equivalent to a given unexplored node v. If there is no such node, then the solution set of v is distinct from all the solution sets of explored nodes in the layer. Otherwise, the solution set of such node \(\bar{v}\) is different from that of v only if the solutions of node v are a proper superset of the solutions of \(\bar{v}\). If the layer has explored nodes corresponding to every possible solution set, then nodes v and \(\bar{v}\) would be equivalent. However, having all such nodes would be prohibitive.
Alternatively, we can individually consider each of the solutions that could be missing from \(\bar{v}\). If a given layer has explored nodes containing each one of them, then node \(\bar{v}\) is always equivalent. We use the following definition for sufficiency:
Definition 2
(Populated layer). A layer is said to be populated if it has explored nodes corresponding to the minimal solution set containing each of the solutions on the remaining variables.
For a solution x in a populated layer, there is a node \(v_x\) with lower ends \(\beta (x)\) corresponding to the tightest RHS values for which x is feasible. In other words, all the inequalities are active for x when the RHS is replaced with \(\beta (x)\). Node \(v_x\) may also have any other solution y such that \(\beta (y) \le \beta (x)\), in which case solution x is only feasible when y is. Note that we only need \(O(2^k)\) nodes with distinct states to populate a layer instead of \(O(2^{2^k})\) to cover all possible states. Figure 3 shows the tightest RHS values associated with each solution for the inequalities of the problem illustrated in Fig. 2. The next result formalizes the condition.

Smallest (right-hand side) RHS values for which each solution in \(\{0,1\}^2\) is feasible for the inequalities with left-hand side (LHS) \(5x_1+4x_2\) and \(6x_1+10x_2\).
Theorem 3
Let v belong to a populated layer. If there is a node \(\bar{v}\) satisfying the necessary condition and the dominance elimination, then node \(\bar{v}\) is equivalent to v. If no node satisfies the necessary condition, then v has no solution.
Proof
Let us suppose, for contradiction, that there is an explored node \(\bar{v}\) that satisfies both conditions but is not equivalent to v. In such a case, node v has a solution x that \(\bar{v}\) does not have. However, a populated layer containing node v would also contain a node \(v_x\) corresponding to the lower ends in \(\beta (x)\). Node \(v_x\) satisfies the necessary condition since v contains x and hence any solution that is always feasible when x is feasible. Therefore, either \(v_x\) is the node left after both conditions or else \(\bar{v}\) contains all solutions of \(v_x\), thereby contradicting that v has a solution that \(\bar{v}\) does not have.
Now let us suppose, for contradiction, that node v has a solution x but no explored node satisfies the necessary condition. That would imply that the layer does not contain a node \(v_x\) corresponding to \(\beta (x)\), a contradiction. \(\Box \)
One way to guarantee that a layer is populated is through bottom-up generation of nodes corresponding to the smallest RHS values yielding each solution.
7 Computational Experiments
We evaluated the impact of identifying equivalent search nodes when constructing reduced decision diagrams for integer linear programming problems. The construction of these diagrams mimics the branch-and-bound tree that emerges from a mathematical optimization solver as it enumerates the solutions of a problem, which we captured through callback functions when a solution is found or a branching decision is about to be made. We use pure 0–1 problems that are small enough to have a reasonable runtime, since enumerating all solutions takes much longer than solving the problem to optimality [19].
For each problem, we defined a gap with respect to the optimal value to limit the enumeration. The gap was chosen as large as possible to either enumerate all solutions or to avoid a considerable solver slowdown, for example from storing search nodes in disk. Nevertheless, we tried to push the gap to the largest possible value since more equivalences can be identified as the solution set gets denser. All problems are either directly obtained or adapted from MIPLIB [11, 12, 44]. When enumerating near-optimal solutions, we add an inequality to limit the objective function value. The order of the selector variables follows the indexing of the decision variables for the corresponding problem. We did not consider the possibility of changing the order of the selector variables, since any such change could have an unrelated effect on the number of branches and runtime.
For each problem, we constructed decision diagrams with preprocessing in the bottom k layers above the terminal node, where \(k \in \{3, 6, 9\}\). We use \(k=0\) as the baseline, which is the case in which we cannot always determine if two nodes are equivalent by inspecting the RHS. For \(k > 0\), we generated the smallest RHS values for each feasible solution on the remaining k variables. We created marked nodes corresponding to each of such RHS vectors, which are explored when first matched with an unexplored node. Finally, we kept track of the solutions found before fixing all variables to avoid recounting them at the bottom of the diagram.
However, the number of equivalences that can be identified decays significantly as we move further away from the bottom of the decision diagram. Since the number of possible states for the last k levels is \(O(2^{2^k})\), it is rather expected that these equivalences will only be identified closer to the bottom—even in the cases that we can significantly reduce the size of the decision diagram. In practice, we did not observe significant gains with a value of k larger than 10.
In our experiments, the code is written in C++ (gcc 4.8.4) using CPLEX Studio 12.8 as a solver and ran in Ubuntu 14.04.4 on a machine with 40 Intel(R) Xeon(R) CPU E5-2640 v4 @ 2.40GHz processors and 132 GB of RAM.
Table 1 reports the number of branches, runtime, and solutions found for each problem. We do not report results for stein9 with \(k=9\) because that problem has exactly 9 variables. Hence, we exclude the results for stein9 from the geometric mean in all cases, although we note that the number of branches and the runtime for stein9 reduced as k increased up to 6. For the rest of the problems, we found a reduction of over 27.7% in number of branches and 7.7% in runtimes when comparing the geometric mean of the baseline with the geometric mean for \(k=9\). We observed a consistent reduction in the number of branches for most cases, which is often not offset by the number of corresponding bottom-up states generated: 15 for \(k=3\), 127 for \(k=6\), and 1,023 for \(k=9\). While generating these additional nodes in advance is cheaper than branching, the extra time to check equivalence might explain the lesser impact on runtime.
8 Conclusion
This paper discussed the connection between redundant work in branch-and-bound and the direct construction of reduced decision diagrams. In both cases, such redundancy may manifest as nodes defining equivalent subproblems that are repetitively explored. That connection is particularly stronger if we want to generate a pool of feasible or near-optimal solutions of a discrete optimization problem, which requires substantially more branching than finding an optimal solution. The enumeration of solutions is a relatively unexplored topic, especially in integer linear programming. Nevertheless, alternate solutions are important in practice and generating them in smaller problems is now technically feasible due to the continuous advances in hardware and algorithms. Furthermore, decision diagrams provide a compact representation of solution sets, with which we can more efficiently manipulate to solve the same problem with different objectives.
Our first contribution is a simple but useful extension of prior work on identifying equivalent problems with a single inequality [1, 2, 6], which can be mainly useful for integer linear programs with fractional coefficients.
Our second contribution, which we believe is the most important, is the theoretical distinction between the case of equivalence involving one inequality and multiple inequalities. For problems defined by inequalities with additively separable LHS, we have seen that explored nodes can be uniquely identified by the smallest RHS values yielding the same solutions. When the nodes are explored in depth-first search, we showed that it is possible to isolate a single explored node as potentially equivalent to each unexplored node. This fact alone simplifies considerably the identification of potentially equivalent search nodes.
Our third contribution is a first sufficient condition to confirm the equivalence among such pairs of nodes, which consists of a bottom-up preprocessing technique based on fixing k among the n variables to branch last. Note that we can reasonably expect that equivalences will be more frequent if there are fewer variables left. For \(k \ll n\), this would only marginally affect the search behavior and, in fact, our experiments showed a positive impact with small values of k.
For large solution sets, we found some instances in which our approach reduced branching and runtime. If the solution set of the decision diagram is not sufficiently dense, the effectiveness of our method would depend on identifying hidden structure in the problems. One potential example are problems with variables that produce the same effect when assigned, which has been previously exploited with orbital branching [39]: if we leave such variables for last in the decision diagram, we can anticipate that many nodes will have equivalent states.
We believe that there is further room to improve on runtime based on the reduction on the number of branches. Another topic for future work would be identifying simpler sufficient conditions for equivalence, which would allow us to directly construct decision diagrams for much larger problems.
Notes
- 1.
Following the recommendation of one of the anonymous reviewers, there is small correction in comparison to [2]: we use \(s \in \{ 0, \ldots , d_i \}\) instead of \(0 \le s \le d_i\).
- 2.
We use a multi-set because two nodes might be connected through multiple arcs for different variable assignments.
References
Abío, I., Nieuwenhuis, R., Oliveras, A., Rodríguez-Carbonell, E., Mayer-Eichberger, V.: A new look at BDDs for pseudo-Boolean constraints. J. Artif. Intell. Res. 45, 443–480 (2012)
Abío, I., Stuckey, P.J.: Encoding linear constraints into SAT. In: O’Sullivan, B. (ed.) CP 2014. LNCS, vol. 8656, pp. 75–91. Springer, Cham (2014). https://doi.org/10.1007/978-3-319-10428-7_9
Achterberg, T., Heinz, S., Koch, T.: Counting solutions of integer programs using unrestricted subtree detection. In: Perron, L., Trick, M.A. (eds.) CPAIOR 2008. LNCS, vol. 5015, pp. 278–282. Springer, Heidelberg (2008). https://doi.org/10.1007/978-3-540-68155-7_22
Andersen, H.R., Hadzic, T., Hooker, J.N., Tiedemann, P.: A constraint store based on multivalued decision diagrams. In: Bessière, C. (ed.) CP 2007. LNCS, vol. 4741, pp. 118–132. Springer, Heidelberg (2007). https://doi.org/10.1007/978-3-540-74970-7_11
Balas, E., Jeroslow, R.G.: Canonical cuts on the unit hypercube. SIAM J. Appl. Math. 23, 61–69 (1972)
Behle, M.: Binary decision diagrams and integer programming. Ph.D. thesis, Universität des Saarlandes (2007)
Bergman, D., Cire, A.A., van Hoeve, W.-J., Hooker, J.N.: Variable ordering for the application of BDDs to the maximum independent set problem. In: Beldiceanu, N., Jussien, N., Pinson, É. (eds.) CPAIOR 2012. LNCS, vol. 7298, pp. 34–49. Springer, Heidelberg (2012). https://doi.org/10.1007/978-3-642-29828-8_3
Bergman, D., Cire, A.A., van Hoeve, W.J., Hooker, J.N.: Discrete optimization with decision diagrams. INFORMS J. Comput. 28(1), 47–66 (2016)
Bergman, D., Cire, A., van Hoeve, W.J., Hooker, J.: Decision Diagrams for Optimization. Springer, Heidelberg (2016). https://doi.org/10.1007/978-3-319-42849-9
Bergman, D., Cire, A.A.: Discrete nonlinear optimization by state-space decompositions. Manag. Sci. 64(10), 4700–4720 (2018)
Bixby, R.E., Boyd, E.A., Indovina, R.R.: MIPLIB: a test set of mixed integer programming problems. SIAM News 25, 16 (1992)
Bixby, R.E., Ceria, S., McZeal, C.M., Savelsbergh, M.W.P.: An updated mixed integer programming library: MIPLIB 3.0. Optima 58, 12–15 (1998)
Bollig, B., Wegener, I.: Improving the variable ordering of OBDDs is NP-complete. IEEE Trans. Comput. 45(9), 993–1002 (1996)
Bryant, R.: Graph-based algorithms for Boolean function manipulation. IEEE Trans. Comput. C–35(8), 677–691 (1986)
Camm, J.D.: ASP, the art and science of practice: a (very) short course in suboptimization. INFORMS J. Appl. Anal. 44(4), 428–431 (2014)
Chu, G., de la Banda, M.G., Stuckey, P.J.: Exploiting subproblem dominance in constraint programming. Constraints 17(1), 1–38 (2012). https://doi.org/10.1007/s10601-011-9112-9
Cire, A.A., van Hoeve, W.J.: Multivalued decision diagrams for sequencing problems. Oper. Res. 61(6), 1411–1428 (2013)
Conforti, M., Cornuéjols, G., Zambelli, G.: Integer Programming. Springer, Heidelberg (2014). https://doi.org/10.1007/978-3-319-11008-0
Danna, E., Fenelon, M., Gu, Z., Wunderling, R.: Generating multiple solutions for mixed integer programming problems. In: Fischetti, M., Williamson, D.P. (eds.) IPCO 2007. LNCS, vol. 4513, pp. 280–294. Springer, Heidelberg (2007). https://doi.org/10.1007/978-3-540-72792-7_22
Danna, E., Woodruff, D.L.: How to select a small set of diverse solutions to mixed integer programming problems. Oper. Res. Lett. 37, 255–260 (2009)
Davarnia, D., van Hoeve, W.J.: Outer approximation for integer nonlinear programs via decision diagrams (2018). https://doi.org/10.1007/s10107-020-01475-4
Ebendt, R., Gunther, W., Drechsler, R.: An improved branch and bound algorithm for exact bdd minimization. IEEE Trans. Comput. Aided Des. Integr. Circuits Syst. 22(12), 1657–1663 (2003)
Fischetti, M., Salvagnin, D.: Pruning moves. INFORMS J. Comput. 22(1), 108–119 (2010)
Fischetti, M., Toth, P.: A new dominance procedure for combinatorial optimization problems. Oper. Res. Lett. 7(4), 181–187 (1988)
GAMS Software GmbH: Getting a list of best integer solutions of my MIP (2017). https://support.gams.com/solver:getting_a_list_of_best_integer_solutions_of_my_mip_model. Accessed 29 Nov 2019
Gurobi Optimization, LLC: Finding multiple solutions (2019). https://www.gurobi.com/documentation/8.1/refman/finding_multiple_solutions.html. Accessed 29 Nov 2019
Haus, U.U., Michini, C., Laumanns, M.: Scenario aggregation using binary decision diagrams for stochastic programs with endogenous uncertainty. CoRR abs/1701.04055 (2017)
Haus, U.U., Michini, C.: Representations of all solutions of Boolean programming problems. In: International Symposium on Artificial Intelligence and Mathematics (ISAIM) (2014)
Hooker, J.N.: Decision diagrams and dynamic programming. In: Gomes, C., Sellmann, M. (eds.) CPAIOR 2013. LNCS, vol. 7874, pp. 94–110. Springer, Heidelberg (2013). https://doi.org/10.1007/978-3-642-38171-3_7
Hosaka, K., Takenaga, Y., Kaneda, T., Yajima, S.: Size of ordered binary decision diagrams representing threshold functions. Theor. Comput. Sci. 180, 47–60 (1997)
Ibaraki, T.: The power of dominance relations in branch-and-bound algorithms. J. Assoc. Comput. Mach. 24(2), 264–279 (1977)
IBM Corp.: IBM ILOG CPLEX Optimization Studio Getting Started with CPLEX Version 12 Release 8 (2017)
IBM Corp.: How to enumerate all solutions (2019). https://www.ibm.com/support/knowledgecenter/SSSA5P_12.9.0/ilog.odms.cplex.help/CPLEX/UsrMan/topics/discr_optim/soln_pool/18_howTo.html. Accessed 29 Nov 2019
Jain, S., Kadioglu, S., Sellmann, M.: upper bounds on the number of solutions of binary integer programs. In: Lodi, A., Milano, M., Toth, P. (eds.) CPAIOR 2010. LNCS, vol. 6140, pp. 203–218. Springer, Heidelberg (2010). https://doi.org/10.1007/978-3-642-13520-0_24
Kohler, W., Steiglitz, K.: Characterization and theoretical comparison of branch-and-bound algorithms for permutation problems. J. Assoc. Comput. Mach. 21(1), 140–156 (1974)
Land, A.H., Doig, A.G.: An automatic method of solving discrete programming problems. Econometrica 28(3), 497–520 (1960)
Lozano, L., Smith, J.C.: A binary decision diagram based algorithm for solving a class of binary two-stage stochastic programs. Math. Program. (2018). https://doi.org/10.1007/s10107-018-1315-z
Morrison, D., Sewell, E., Jacobson, S.: Solving the pricing problem in a branch-and-price algorithm for graph coloring using zero-suppressed binary decision diagrams. INFORMS J. Comput. 28(1), 67–82 (2016)
Ostrowski, J., Linderoth, J., Rossi, F., Smriglio, S.: Orbital branching. Math. Program. 126, 147–178 (2011). https://doi.org/10.1007/s10107-009-0273-x
Perez, G., Régin, J.C.: Efficient operations on MDDs for building constraint programming models. In: International Joint Conference on Artificial Intelligence (IJCAI) (2015)
Petit, T., Trapp, A.C.: Enriching solutions to combinatorial problems via solution engineering. INFORMS J. Comput. 31(3), 429–444 (2019)
Raghunathan, A., Bergman, D., Hooker, J., Serra, T., Kobori, S.: Seamless multimodal transportation scheduling. CoRR abs/1807.09676 (2018)
Sanner, S., Uther, W., Delgado, K.V.: Approximate dynamic programming with affine ADDs. In: AAMAS (2010)
Serra, T., Hooker, J.: Compact representation of near-optimal integer programming solutions. Math. Program. 182, 199–232 (2019). https://doi.org/10.1007/s10107-019-01390-3
Serra, T., Raghunathan, A.U., Bergman, D., Hooker, J., Kobori, S.: Last-mile scheduling under uncertainty. In: Rousseau, L.-M., Stergiou, K. (eds.) CPAIOR 2019. LNCS, vol. 11494, pp. 519–528. Springer, Cham (2019). https://doi.org/10.1007/978-3-030-19212-9_34
Serra, T., Ramalingam, S.: Empirical bounds on linear regions of deep rectifier networks. CoRR abs/1810.03370 (2018)
Tjandraatmadja, C., van Hoeve, W.J.: Target cuts from relaxed decision diagrams. INFORMS J. Comput. 31(2), 285–301 (2019)
Trapp, A.C., Konrad, R.A.: Finding diverse optima and near-optima to binary integer programs. IIE Trans. 47, 1300–1312 (2015)
Valiant, L.G.: The complexity of computing the permanent. Theoret. Comput. Sci. 8, 189–201 (1979)
Valiant, L.G.: The complexity of enumeration and reliability problems. SIAM J. Comput. 8(3), 410–421 (1979)
Verhaeghe, H., Lecoutre, C., Schaus, P.: Compact-MDD: efficiently filtering (s) MDD constraints with reversible sparse bit-sets. In: IJCAI (2018)
Verhaeghe, H., Lecoutre, C., Schaus, P.: Extending compact-diagram to basic smart multi-valued variable diagrams. In: Rousseau, L.-M., Stergiou, K. (eds.) CPAIOR 2019. LNCS, vol. 11494, pp. 581–598. Springer, Cham (2019). https://doi.org/10.1007/978-3-030-19212-9_39
Ye, Z., Say, B., Sanner, S.: Symbolic bucket elimination for piecewise continuous constrained optimization. In: van Hoeve, W.-J. (ed.) CPAIOR 2018. LNCS, vol. 10848, pp. 585–594. Springer, Cham (2018). https://doi.org/10.1007/978-3-319-93031-2_42
Acknowledgements
I would like to thank John Hooker for bringing this topic to my attention and the anonymous reviewers for their detailed feedback.
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2020 Springer Nature Switzerland AG
About this paper

Cite this paper
Serra, T. (2020). Enumerative Branching with Less Repetition. In: Hebrard, E., Musliu, N. (eds) Integration of Constraint Programming, Artificial Intelligence, and Operations Research. CPAIOR 2020. Lecture Notes in Computer Science(), vol 12296. Springer, Cham. https://doi.org/10.1007/978-3-030-58942-4_26
Download citation
DOI: https://doi.org/10.1007/978-3-030-58942-4_26
Published:
Publisher Name: Springer, Cham
Print ISBN: 978-3-030-58941-7
Online ISBN: 978-3-030-58942-4
eBook Packages: Computer ScienceComputer Science (R0)