
Abstract
Accurate seafloor maps serve as a critical component for understanding marine ecosystems and are essential for marine spatial planning, management of submerged cultural heritage and hazard risk assessments. In September 2001 the Marine Protected Area (MPA) of Punta Licosa has been mapped using a multibeam echosounder (MBES) and a side scan sonar (SSS) system in support of the Geosed project. Such seabed investigations has allowed for high-resolution bathymetric measurements and acoustic seafloor characterization through backscatter imagery.
Based on visual interpretation of the data, the present study utilized a computer-aided seabed classification approach to map marine landform features and seabed composition of the study area. The results were then translated into a complete coverage geomorphologic map of the area to define benthic habitats. Offshore shelf plain make up more than half of the region (52.2%), with the terraces making up another 10.2% of the total area. Slopes make up a cumulative 30.1% of the study area. Scarp features comprise 4.3% while ridge features reach only 3.2% of the total study area. Benefits of the computer-aided seabed classification approach used in this study consisted in a fairly accurate geomorphic classification, while the effectiveness of a semi-automated approach for identifying substrate composition from backscatter data mostly relied on the level of acoustic artefacts present within the survey area.
Access provided by Autonomous University of Puebla. Download conference paper PDF
Similar content being viewed by others

Keywords
1 Introduction
The mapping of seabed habitats is now recognized as an important tool for both marine resource management and scientific study. Many government organizations managing coastal resources are developing standards for seafloor and benthic habitat characterization and mapping [1,2,3,4]. These studies mainly rely on marine geophysical surveys [5,6,7,8] that enable to map the spatial distribution and the physical aspects (such as sediment characteristics, water depth and morphology) of benthic habitats (potential benthic habitat), while providing a means of estimating the occurrence of biota that commonly utilize that habitat type [9,10,11].
Among the physical attributes mapped and measured in detail in recent times using multibeam sonar equipment is the geomorphology of the seafloor. Seafloor geomorphology is a first order descriptor containing information such as relief, geology, geo-logic history, and formative processes that provides a synthesis of attributes and information relevant for characterizing physical habitats [12,13,14]. Bathymetry data and seafloor intensity data (backscatter) can be integrated with ground-truthing data to produce categorical maps of geomorphic features and biotopes that predict distributions of biota and substrates across broad spatial scales [15, 16]. Evaluating the usefulness of seafloor geomorphology as a proxy for characterization of complex benthic biological communities is an active area of global marine research effort [13, 17].
The applications of automated techniques to geomorphic seabed classification may provide essential information to benthic habitat mapping [18,19,20]. As the volume of high-resolution seabed data increases globally, there is a growing interest in automated approaches to seabed terrain analysis based on gridded bathymetric data (DEMs) [21, 22]. These approaches typically involves segmentation of the seafloor into more or less homogeneous classes that exhibit a defined variation in size, scale and shape of geomorphic features such as landforms and their sub-components (landform elements) [23, 24]. While automated approaches offer promising benefits of repeatability, the application of these classification techniques to seabed mapping remains a developing field of study.
In Italy, the Ministry of Environment endorsed the European Directives Natura 2000 and Marine Strategy (2008/56/CE) that establish habitats of priority importance and a framework of necessary measures to achieve or maintain good environmental status in the marine environment. Nevertheless, no action has been taken at national level for developing a methodology that includes geomorphic features. This led to the production of maps that identify the structure of biotic communities on the base substrate features (bionomic maps) without defining other physical components that affect the abundance and distribution of benthic organisms on the seabed [25].
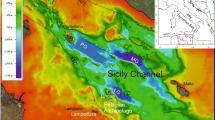
The study area is located within the official boundary of the Cilento, Vallo di Diano, and Alburni Geopark in southern Italy and covers an area of about 140 km2 down to a depth of – 135 m (Fig. 1). It is characterized by minor embayment with soft sediments, which alternates with rocky shore and cliffed coast and headlands, to which associates a diversity of habitats both along the coast and on the seabed. The marine coastal areas are actively colonized by phanerogams (Posidonia oceanica) and dominated by coarse biogenic sediments and carbonate buildups made by encrusting organisms (bioconstructions). Since 2009 it is part of the “Santa Maria di Castellabate” Marine Protected Area (MPA) which has been established on the bases of marine species and habitats of priority importance for the European Union.

Location of the study area (dashed box) with the indication of the shelf break (red dashed line) (Color figure online)
The morphological features of the seabed off the Santa Maria di Castellabate marine coastal area are dominated by the Licosa Bank (LB) which represents the seaward prosecution of the Punta Licosa promontory (Fig. 2). The LB extends in an east-west direction up to 13 km from the coast, with a relief ranging from 40 to 125 m above the seabed. Rocky substrates, past sea level oscillations, and slope instability phenomena affecting the LB resulted in a very complex morphologic pattern fostering benthic environments that are characterized by a very high biological productivity. On the LB, wave-cut platforms occur at two main depth levels: - 20 and - 50 m.

Geologic sketch map of the study area.
The aim of this paper is to characterize and map the seafloor off Punta Licosa promontory in the Cilento coast using a computer-aided geomorphic seabed classification. Automated segmentation of DEM surface obtained from multibeam bathymetry of the study area allowed for the identification of marine landforms and landform elements that were translated into classified geomorphic features by visual interpretation of the data. Following this approach, benthic maps that include seabed geomorphology and composition were obtained from bathymetry and backscatter data aided by seafloor sedimentological data. The results were then compared with previous seabed classifications in the Punta Licosa MPA [26, 27] to examine the relative ability of semi-automated and manual techniques for identifying and mapping sea-floor geomorphic features.
2 Materials and Methods
2.1 MBES and SSS Data Acquisitions and Processing
In July 2001 the seabed off Punta Licosa was mapped by IAMC-CNR_Napoli using the CNR research vessel Tethys. Swath bathymetry and backscatter data were collected using a 100 kHz Reson Seabat 8111 Tx/Rx multibeam (MBES) and 100 kHz Klein Side Scan Sonar (SSS) systems. Surveys were operated at speeds of 3 to 6 knots with distances between adjacent transects run to achieve 20%–50% overlap. Sound velocity data were collected daily as water column profiles to correct for variability in through-water sound speeds associated with changing densities within the water mass. Vessel motion and position were logged using a MAHRS inertial navigation system, produced by Teledyne with DGPS corrections in real-time. Bathymetric soundings were processed edited and cleaned using PDS 2000. Cleaned soundings were then gridded using weighted averaging to produce 5 m cell size digital elevation models (DEM; Fig. 3).

Shaded relief map of the Punta Licosa marine area. Dashed box is the location of Fig. 4.
The SSS system was equipped with ultra-short baseline positioning (USBL) to accurately locate the tow-fish position relative to the vessel. The collected backscatter data were corrected for navigation and slant range distortion. Mosaicking of the sidescan sonar records resulted in backscatter maps with sub-meter resolution (Fig. 4).

Detail of the backscatter map obtained from Side Scan Sonar data. Location in Fig. 2.
2.2 Ground-Truthing Data Collection and Processing
Sediment grab samples were collected within the study area to characterize the seabed substrates and ground-truth the SSS backscatter data. Sediment samples were collected from R/V Tethys in September 2008. A total of 20 sediment samples were recovered between 18 m and 77 m water depth, using Van-Veen grab samplers deployed via the rear-A crane. Sediment texture and composition was described onboard to determine the character of the samples. Additionally, towed video inspections by Remote Operated Vehicle (ROV) were carried out in 2014 from aboard the CNR research vessel Urania using a Pollux III equipped with HD color camera [28].
Grain size properties of the sediment samples were determined by sieve separation of the gravel, sand, and mud fractions and by laser granulometry on the combined mud and sand fractions, using a Sympatec analyzer. Sandy biogenic sediments constitute the dominant sediment fraction in the survey area (78.41%), composed mostly of skeletal grains and bioclastic material (87%). Nine of the collected samples were classified as coarse sand with gravels, four as coarse sand, three as muddy sand, one as fine sand, and two as sandy mud. The overall mud fraction is 22.6%. Gravel-dominated sediment occurs mostly along the coast at the base of rocky cliffs. However, very coarse sand and gravel are very common up to a depth 100 m.
3 Interpretation of Seafloor Landforms
Landforms were classified adapting a free stand-alone application (BRESS) [29, 30]. The BRESS algorithm performs a bathymetry-derived segmentation, that is, a segmentation of the DEM surface, through the identification of its seafloor geomorphological elements, and provides statistical layers that characterize the identified segments. This application implements principles of topographic openness and pattern recognition to identify terrain features from bathymetric DEMs that can be classified into easily recognizable landform types such as valleys, slopes, ridges, and flats (“bathy-morphon” architypes) [31].
“Bathymorphon” architypes represent the relative landscape relationships between a single DEM grid node and surrounding grid nodes as assessed in eight directions around the node (the four cardinal directions and the four main inter-cardinal directions). The position of a grid node relative to others in the terrain are determined via a line-of-sight method looking out in each direction by a user defined search annulus specified by an inner and outer search radius. The search annulus units are grid nodes, so the length of this is dependent directly on the resolution of the input raster grid.
The line-of-sight principle is implemented by using a user-defined parametric angular flatness threshold and the difference between the zenith and the nadir angles of a grid node. Based on angular flatness and the above defined angular difference, each node is assigned to a bathymorphon class that expresses the degree of dominance or enclosure of a node location on an irregular surface (i.e., the openness) [32] at the user-identified scale (i.e., the search annulus). Reasonable values for angular flatness and search annulus are obtained by extensive testing aimed to outline landform features that are more comparable to visual interpretation [33].
The bathymorphons can be grouped into a relatively small (from ten to four) number of landform classes that capture most of the relevant morphologic relationships related to landform description. In the study area testing of the key parameters (i.e. search annulus and flatness) resulted in landform classes that were systematically evaluated within 3D visualization software to assess if the prominent landform features of interest were correctly identified (Fig. 5). Outcomes for an effective spatial segmentation of the DEM surface off Punta Licosa were found mostly associated with flatness parameter of 1.0°, and inner and outer radius of 5 and 20 grid nodes respectively, which identified flats, ridges and slopes classes. However, flatness parameter of 5.0°, an inner radius of 1grid nodes and an outer radius of 10 was used to characterize steep and narrow seafloor areas (scarp features).

Landscape classes obtained from bathymetric data
3.1 Geomorphic Classification
The semi-automated procedure discussed above allowed the segmentation of the study area into homogeneous classes of landforms that, based on their size, scale and shape, were directly translated into classified geomorphic features or processed as landform elements of larger geomorphic units (e.g. shelf plain, terrace and shoreface). Following this approach, the polygons defining landform classes were renamed as appropriate for the geomorphic feature (geoforms) they represent throughout the extent of the Punta Licosa MPA (Table 1). Five geoforms were associated with flat landform class, one with slope, one with scarp and one with ridge class. As no valley/channel classes occur in the study area, this feature was considered as slope class.
The geoform terms used for classifying the investigated seabed area were sourced from several classification schemes including the coastal and marine ecological classification standard [4], hydrographic dictionary [34] and the standardization of undersea feature names [35].
4 Classification of Seabed Composition
The substrate classification was derived from the backscatter data supported by the ground-truthing results from sediment grab sampling. Representative areas of distinct backscatter intensity (classes) were selected as training areas with a Sea floor Classification utility (SeaClass) produced by Triton ElicsTM. Using these samples, a map of the sea floor depicting the defined classes was created (see Fig. 4).
The user-defined categories recognized 11 acoustic facies in the survey area. Five acoustic facies are associated with sediment grain size, one corresponds to hard substrata, two relate to biological features (carbonate buildups and seafloor vegetation), one is associated with landslide blocks and one correspond to sediment remobilization.
The substrate map shows that the flat areas are variably comprised of muddy, fine and coarse sand facies, which are irregularly distributed between the offshore shelf plain and the Licosa bank.
Sandy muds represent the most dominant soft-substrate class (58% of the mapped area), comprising the majority of the offshore shelf plain and foot slope areas. Coarse sands, identified by consistently high and irregular backscatter intensity, are the second most dominant substrate type (38% of the mapped area) and comprise the majority of slope areas. Fine sands are associated with consistently low backscatter reflectance and occur in shoreface areas, while rocks mostly form bathymetric highs, and locally occur along slopes and terraces.
5 Geomorphic Features and Benthic Habitats
Substrate features aided by benthic community data from video and scuba inspections were combined with geomorphic features by Geographic Information System (GIS) overlay analysis to discriminate benthic habitats of the study area that are described below (Fig. 6 and Table 1).

Map of the benthic habitats of the Punta Licosa MPA
Plains:
These cover 81.6 km2 in water depth ranging from 30 to 130 m with average gradients nearly reaching 1°. Plains composed of sandy mud in water depths of more than 30 m (offshore plains) mostly occupy the northern sector of the survey area (70.8 km2). This sector is also occupied by plains that are characterized by muddy sand in water depths of less than 30 m (sandy shoreface).
Slopes:
Gentle slopes cover 39.7 km2 of the survey area, from the top of the LB up to a depth of ~120 m. In this area gradients range from 5° near the top of the LB to 3° in the distal areas. Seabed composition is characterized by coarse biogenic sand with a fine gravel fraction locally reaching 25%, with a higher mud fraction in water depths of more than 80 m. In its middle and lower parts, the slope is characterized by several mounds ranging from a few to 65 m in diameter corresponding to coralligenous bioconstructions while sediment remobilization from the top of the LB occur the upper parts of the slope.
Scarps:
These are steeply sloping narrow areas ranging from 5 to 15° mostly composed of hard bottoms that cover 4.2 km2 along slopes in water depth ranging from −25 to −120 m.
Terraces:
Two main wave-cut terraces with slightly convex slopes are present at the top of the LB at depth levels of - 20 and - 50 m on average. These structures cover 3.6 km2 and are characterized by sediment covers of gravel and very coarse organogenic sand colonized by Posidonia oceanica meadows. Nearly flat, slightly concave, terraces also occupy 4.7 km2 in 44–85 m water depth. Here the seabed is composed of muddy detritic sediments with sparse mound-shaped bioconstructions reaching 30 m in diameter.
Ridges:
These are elongated narrow elevations with steep sides mostly composed of hard bottoms that cover 3.1 km2 in water depth ranging from 15 to 120 m. They occur on top of shallow seabed reliefs and along slope as well as isolated structures in shelf areas. In these areas seabed composition is characterized by sandy mud with elongated coralligenous bioconstructions.
Boulder fields:
Metric and plurimetric rocky boulders resulting from slope recession are scattered on the seabed up to distances of several hundred meters from the base of the LB. They cover 2.4 km2 in water depth ranging from 80 to 130 m and are mostly colonized by small coralligenous bioconstructions.
6 Discussion
The methodological approach presented in this study was mainly aimed to discuss the use of relatively simply and freely available tools for semi-automated seabed classification in the frame of the geophysical methodologies that are currently applied to benthic habitat mapping. The free stand-alone application BRESS has offered the opportunity to test this approach in the Punta Licosa MPA. The automatic seafloor segmentation resulting from BRESS algorithm applied to bathymetry-based DEM surface of the study area allowed identifying terrain features that were classified into easily recognizable landform. Landform classes were then translated into classified geomorphic features on base of their size, scale and shape, using several classification schemes reported in literature [4, 34, 35].
Both stages of seafloor segmentation and geomorphic interpretation required significant user inputs and visual inspections. Expert knowledge of feature identification has resulted to be particularly important in the stage of geomorphic interpretation to include landforms within the context of the surrounding seascape and ensuring the features identified match the geoform definitions. On the other hand, adopting a semi-automated approach for the surface elements classification significantly reduced the time to digitize manually feature boundaries.
Overall, the level of bathymetric artefacts present within a survey area affected only to a lesser extent the effectiveness of the surface elements classification. A higher number of artefacts was associated with Side Scan Sonar survey, which required a greater time investment to edit manually the acoustic facies derived from backscatter data.
6.1 Comparison with Manually Digitized Seabed Habitat Map
The map of benthic habitats of the Punta Licosa MPA presented in this paper (Fig. 6) was compared with a previous manually digitized seafloor mapping of the study area (Fig. 7) [23, 24]. The comparison indicates that the automated method (BRESS) applied in the present study is most effective at capturing the boundaries of prominent features, which subsequently formed the boundaries of the mapped geoforms. Although this method was mostly designed for broad scale bathymetric features, it allowed the spatial extent of the recognized geomorphic features and related benthic habitats to be quite comparable to the extents of those manually digitized. Furthermore, the semi-automated seafloor classification introduced a landscape type referred to the ridge class, which was not included in the manually digitized maps. This resulted in a benthic habitat characterization of the study area which differ to some extent from that proposed by previous manual techniques.

Punta Licosa habitat map. (1) Spur of coralligenous bioconstruction. (2) Wave-cut terrace with mixed organogenic cover. (3) Slope with mixed organogenic sediments. (4) Depositional terrace. (5) Rock. (6) Deep terrace with bioclastic cover. (7) Ledge with coralligenous. (8) Shelf muddy plain. (9) Sandy fringe with bioclast. (10) Offshore transition. Redrawn from [27]
7 Conclusion
The approach developed through this work provides clues on how to consistently classify geomorphic units that are relevant to benthic habitat mapping by using a relatively simple and freely available tools for semi-automated seabed segmentation (BRESS). Habitat mapping of the study area utilized several complementary geophysical technologies including multibeam and Side Scan Sonar systems and Remote Operated Vehicle (ROV). These surveys has allowed for high-resolution bathymetric measurements and acoustic seafloor characterization that resulted in backscatter map of the seabed and production of bathymetric DEMs.
The BRESS terrain analysis algorithm used in this work was effective at generating meaningful landform maps through a segmentation of the DEM surface, which were used to identify geomorphic units. This tool allowed for high speed classification of terrain over complex morphology that characterize the study area and proved to be effective at classifying small scale geomorphic features. Integration of landform and substrate classifications to produce seabed character and geomorphology maps still required significant subjective expert interpretation to generally delineate among the different landscape classes and to quality control of the landform classification output.
References
Pickrill, R.A., Kostylev, V.E.: Habitat mapping and national seafloor mapping strategies in Canada. In: Todd, B.J., Greene, H.G. (eds.) Mapping the Seafloor for Habitat Characterization. Geological Association of Canada, Special Paper, vol. 47, pp. 483–495 (2007)
Cogan, C.B., Todd, B.J., Lawton, P., Noji, T.T.: The role of marine habitat mapping in ecosystem-based management. ICES J. Mar. Sci. 66, 2033–2042 (2009)
FGDC (Federal Geographic Data Committee): Coastal and Marine Ecological Classification Standard. Federal Geographic Data Committee, Reston, VA (2012)
Andersen, J.H., et al.: European broad-scale seabed habitat maps support implementation of ecosystem-based management. Open J. Ecol. 8, 86–103 (2018)
Roff, J.C., Taylor, M.E.: A geophysical classification system for marine conservation. Aquat. Conserv. Mar. Freshw. Ecosyst. 10, 209–223 (2000)
Kostylev, V.E., Todd, B.J., Fader, G.B.J., Courtney, R.C., Cameron, G.D.M., Pickrill, R.A.: Benthic habitat mapping on the Scotian Shelf based on multibeam bathymetry, surficial geology and sea floor photographs. Mar. Ecol. Progr. Ser. 219, 121–137 (2001)
Ehrhold, A., Hamon, D., Guillaumont, B.: The REBENT monitoring network, a spatially integrated, acoustic approach to surveying nearshore macrobenthic habitats: application to the Bay of Concarneau (South Brittany, France). ICES J. Mar. Sci. 63, 1604–1615 (2006)
Violante, C., Mazzola, S.: Geophysical techniques for protection and management of marine habitat: example from the Campania offshore, Eastern Tyrrhenian Sea. In: Proceedings of the 7th EUREGEO—EUropean congress on REgional GEOscientific Cartography and Information Systems, Bologna, Italy, pp. 395–397 (2012)
Post, A.L.: The application of physical surrogates to predict the distribution of marine benthic organisms. Ocean Coast. Manage. 51, 161–179 (2008)
Nichol, S., Huang, Z., Howard, F., Porter-Smith, R., Lucieer, V.L., Barrett, N.: Geomorphological classification of reefs–draft framework for an Australian Standard; Report to the National Environmental Science Program, Marine Biodiversity Hub. Geoscience Australia, Canberra, Australia, p. 27 (2016)
Greene, H.G., Bizzarro, J.J., O’Connell, V.M., Brylinsky, C.K.: Construction of digital potential benthic habitat maps using a coded classification scheme and its application. In: Todd, B.J., Greene, H.G. (eds.) Mapping the Seafloor for Habitat Characterisation. Geological Association of Canada Special Paper 47, St. Johns, Newfoundland, pp. 141–156 (2007)
Harris, P.T.: From Seafloor Geomorphology to Predictive Habitat Mapping: Progress in Applications of Biophysical Data to Ocean Management. Geoscience Australia, Canberra (2012)
Harris, P.T., Baker, E.K. (eds.) Seafloor Geomorphology as Benthic Habitat: GeoHAB Atlas of Seafloor Geomorphic Features and Benthic Habitats, 2nd edn. p. 1045. Elsevier Science, Burlington (2020)
Althaus, F., Williams, A., Kloser, R.J., Seiler, J., Bax, N.J.: Evaluating geomorphic features as surrogates for benthic biodiversity on Australia’s western continental margin. In: Todd, B.J., Greene, H.G. (eds.) Mapping the Seafloor for Habitat Characterization. Geological Association of Canada, Canada, pp. 665–679 (2012). https://doi.org/10.1016/b978-0-12-385140-6.00048-7
Olenin, S., Ducrotoy, J.: The concept of biotope in marine ecology and coastal management. Mar. Pollut. Bull. 53, 20–29 (2006)
Brown, C.J., Sameoto, J.A., Smith, S.J.: Multiple methods, maps, and management applications: Purpose made seafloor maps in support of ocean management. J. Sea Res. 72, 1–13 (2012)
Harris, P.T., Baker, E.K. (eds.): Seafloor Geomorphology as Benthic Habitat: GeoHAB Atlas of Seafloor Geomorphic Features and Benthic Habitats, p. 947. Elsevier Science, Burlington (2012). https://doi.org/10.1016/B978-0-12-385140-6.00071-2
Ismaila, K., Huvenneb, V.A., Masson, D.G.: Objective automated classification technique for marine landscape mapping in submarine canyons. Mar. Geol. 362, 17–32 (2015). http://dx.doi.org/10.1016/j.margeo.2015.01.006
Preston, J.: Automated acoustic seabed classification of multibeam images of Stanton Banks. Appl. Acoust. 70, 1277–1287 (2009). https://doi.org/10.1016/j.apacoust.2008.07.011
Olaya, V.: Basic land-surface parameters. In: Hengl, T., Reuter, H. (eds.) Geomorphometry, Concepts, Software, Application, pp. 141–169. Elsevier, Burlington (2009)
Diesing, M., Green, S.L., Stephens, D., Lark, R.M., Stewart, H.A., Dove, D.: Mapping seabed sediments: Comparison of manual, geostatistical, object-based image analysis and machine learning approaches. Cont. Shelf Res. 84, 107–119 (2014)
Schmidt, J., Hewitt, A.: Fuzzy land element classification from DTMs based on geometry and terrain position. Geoderma 121, 243–256 (2004)
MacMillan, R., Shary, P.: Landforms and landform elements in geomorphometry. Dev. Soil Sci. 33, 227–275 (2009). ISSN 0166-2481. https://doi.org/10.1016/s0166-2481(08)00009-3
Evans, I.S.: Geomorphometry and landform mapping: What is a landform? Geomorphology 137, 94–106 (2012)
Violante, C., De Lauro, M., Esposito, E.: Fine-scale seabed habitats off Capri Island, southern Italy. In: Harris, P.T., Baker, E.K. (eds.) Seafloor Geomorphology as Benthic Habitat. GeoHAB Atlas of Seafloor Geomorphic Features and Benthic Habitats. 2nd edn. pp. 439–450 (2020). https://doi.org/10.1016/B978-0-12-814960-7.00024-5
D’Angelo, S., Di Stefano, F., Fiorentino, A., Lettieri, M., Russo, G., Violante, C.: The map of the marine landscapes and habitats of Cilento, Vallo di Diano and Alburni Geopark. Linking geo- and bio- diversity with a multiscalar approach. In: Proceedings of the 12th European Geoparks Conference, 8 p. (2013)
D’Angelo, S., Stefano, F., Fiorentino, A., Lettieri, M.A., Russo, G., Violante, C.: Marine landscapes and habitats of Cilento Geopark (Italy). Linking geo- and bio- diversity with a multiscalar approach. In: Harris, P.T., Baker, E.K. (eds.) Seafloor Geomorphology as Benthic Habitat. GeoHab Atlas of Seafloor Geomorphic Features and Benthic Habitats. 2nd edn. pp. 421–437 (2020). https://doi.org/10.1016/B978-0-12-814960-7.00023-3
Violante, C., De Lauro, M.: Oceanographic cruise Seascape_14. Technical report, CNR Solar, 10 p. (2014)
Masetti, G., Mayer, L.A., Ward, L.G.: A bathymetry- and reflectivity based approach for seafloor segmentation. Geosciences 8(14) (2018). https://doi.org/10.3390/geosciences8010014
Hydroffice: Bathymetric- and Reflectivity-Based Estimator of Seafloor Segments (BRESS) (2019). https://www.hydroffice.org/bress/main
Jasiewicz, J., Stepinski, T.F.: Geomorphons - a pattern recognition approach to classification and mapping of landforms. Geomorphology 182, 147–156 (2013). https://doi.org/10.1016/j.geomorph.2012.11.005
Yokoyama, R., Shirasawa, M., Pike, R.J.: Visualizing topography by openness: a new application of image processing to digital elevation models. Photogramm. Eng. Remote Sens. 68, 257–266 (2002)
Sowers, D.C., Masetti, G., Mayer, L.A., Johnson, P.l., Gardner, J.V., Armstrong, A.A.: Standardized geomorphic classification of seafloor within the United States atlantic canyons and continental margin. Front. Mar. Sci. 28 January 2020 (2020). https://doi.org/10.3389/fmars.2020.00009
International Hydrographic Organisation (IHO): Hydrographic Dictionary; International Hydrographic Bureau: Monaco, French, p. 281 (2014)
International Hydrographic Organisation (IHO): Standardization of Undersea Feature Names: Guidelines, Proposal Form, Terminology, 4th ed.; Bathymetric Publication No. 6; International Hydrographic Bureau: Monaco, French, p. 38 (2017)
Acknowledgments
I am grateful to the Master of R/Vs Urania and Thetis Captains Emanuele Gentile and Aimone Patanè and all the crewmembers for their significant contribution to the geophysical survey operations. Thanks also to the two anonymous reviewers who provided valuable feedback which greatly improved the manuscript. This work was supported by the project PON-IDEHA, Innovation for Data Elaboration in Heritage Areas, financed by the Italian Ministry of the University and Scientific and Technologic Research.
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2020 Springer Nature Switzerland AG
About this paper

Cite this paper
Violante, C. (2020). Computer-Aided Geomorphic Seabed Classification and Habitat Mapping at Punta Licosa MPA, Southern Italy. In: Gervasi, O., et al. Computational Science and Its Applications – ICCSA 2020. ICCSA 2020. Lecture Notes in Computer Science(), vol 12250. Springer, Cham. https://doi.org/10.1007/978-3-030-58802-1_49
Download citation
DOI: https://doi.org/10.1007/978-3-030-58802-1_49
Published:
Publisher Name: Springer, Cham
Print ISBN: 978-3-030-58801-4
Online ISBN: 978-3-030-58802-1
eBook Packages: Computer ScienceComputer Science (R0)